【机器人和人工智能——自主巡航赛项】进阶篇
文章目录
- 案例要求
- 创建地图
- rviz仿真
- 保存地图
- 坐标点定位
- 识别训练
- 主逻辑理解
- 语音播报
- 模块匹配
- 二维码识别
- 多点导航
- 讲解视频
- 其余篇章
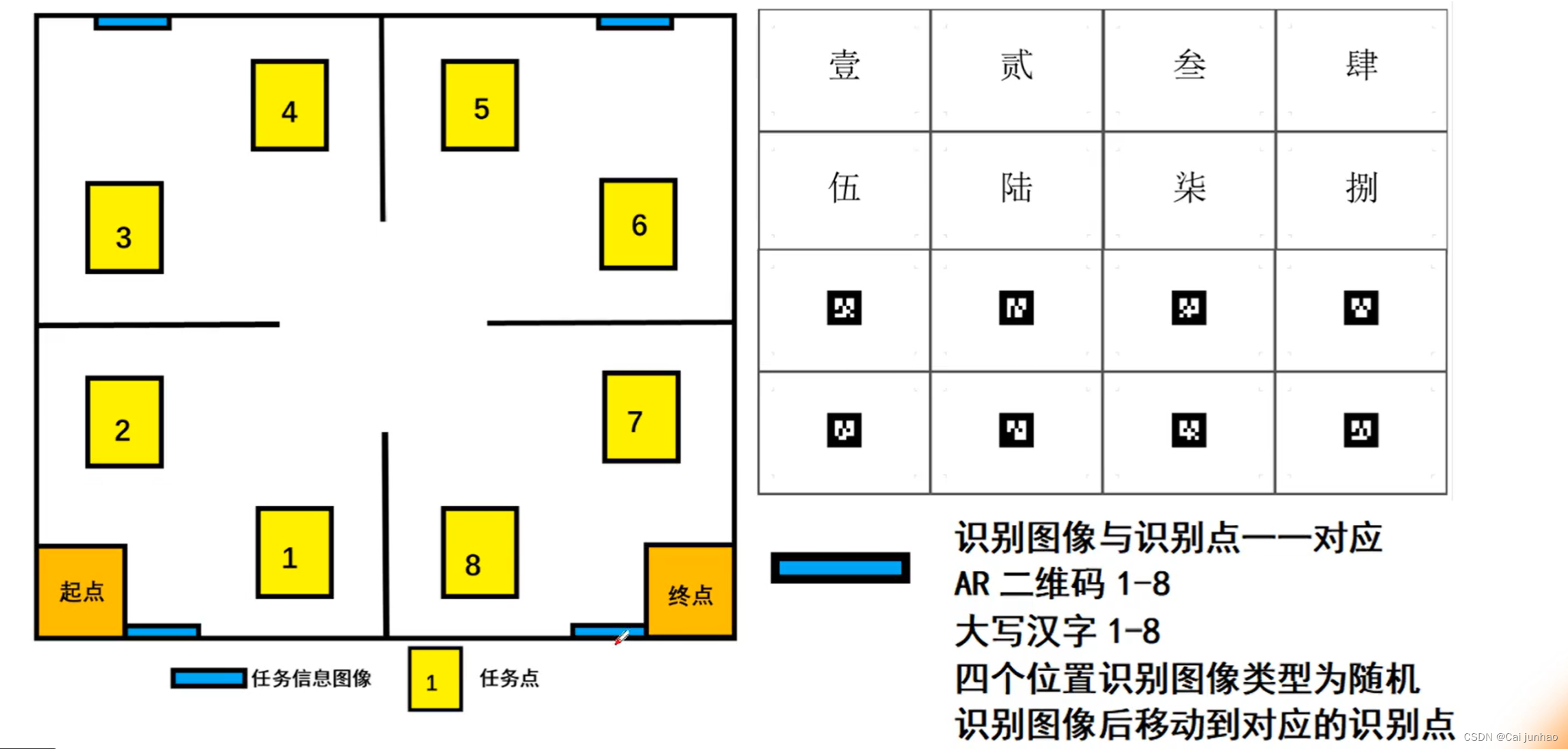
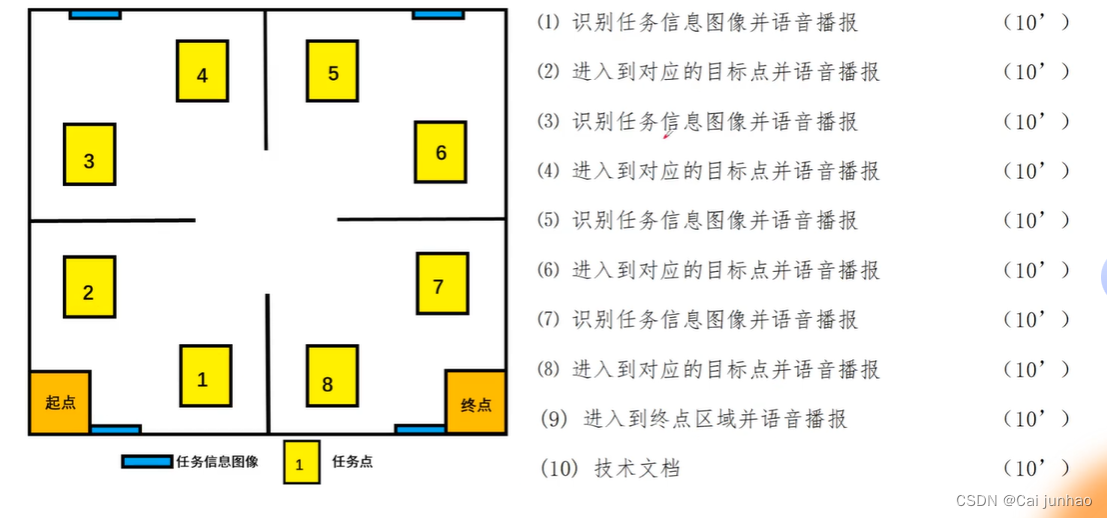
案例要求
创建地图
./1-gmapping.sh
把多个launch文件融合在sh文件里面
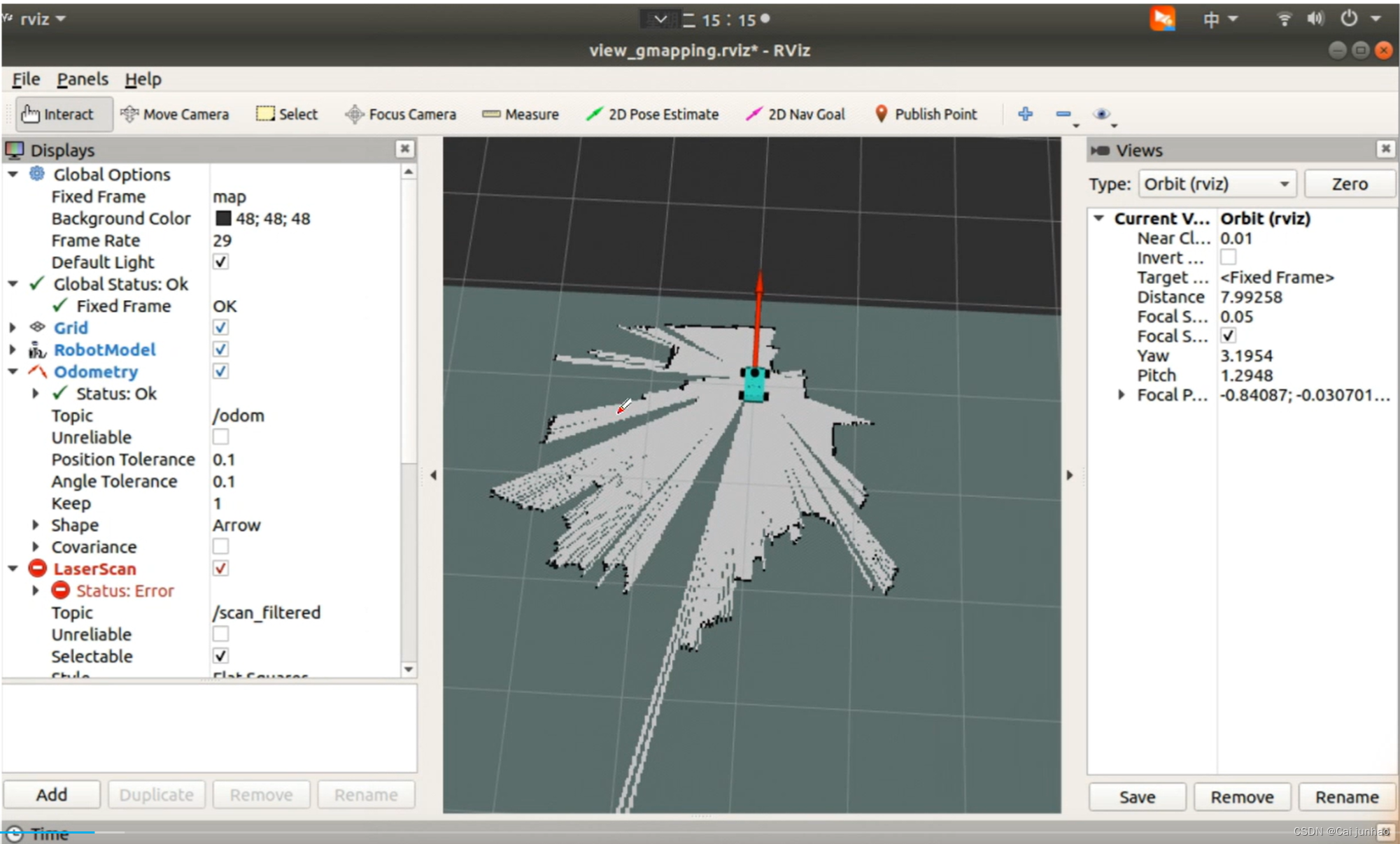
rviz仿真
rviz是rose集成的可视化界面,查看机器人的各项数据,
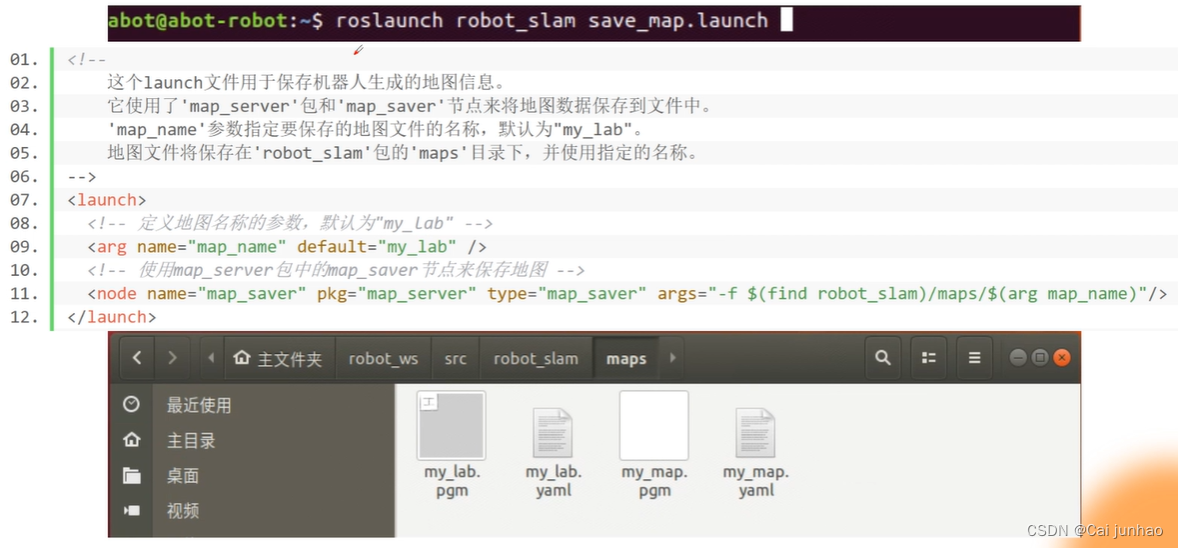
保存地图
roslaunch robot_slam save_map.launch
坐标点定位
要让机器人移动到对应位置,给予坐标信息(X,Y,偏转角度),信息保存于multi_goal.launch
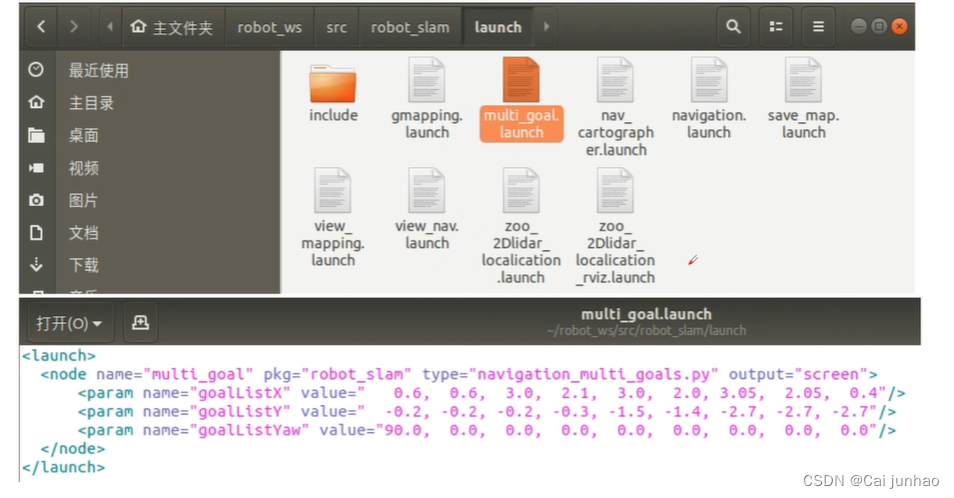
建图位置和起点位置要重合
小车的坐标系:X轴朝左,单位m;Y轴朝上,单位m;偏转角度逆时针为正,单位°
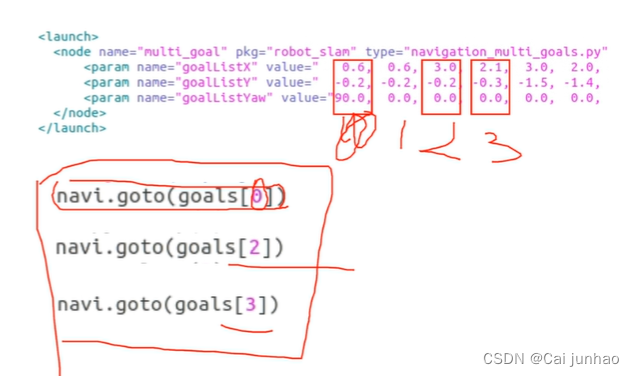
调用坐标点的命令:
navi.goto(goals[第几个坐标])
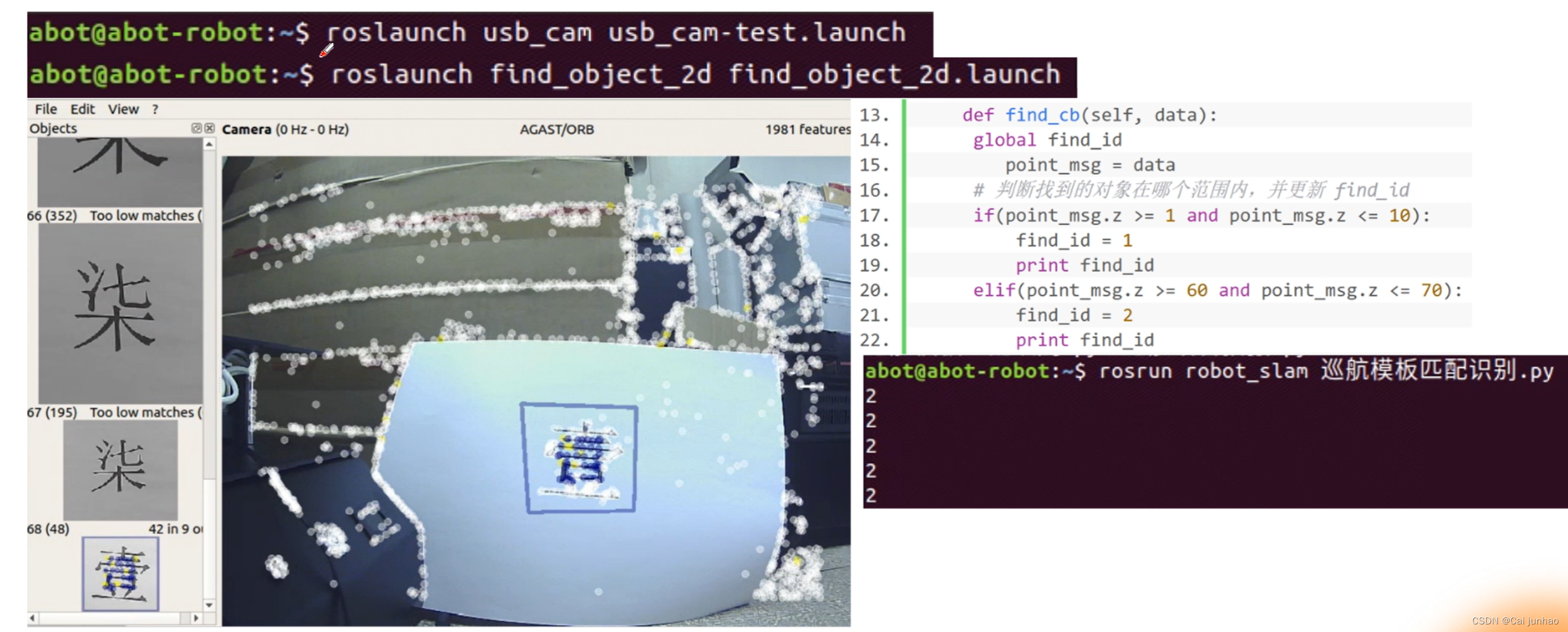
识别训练
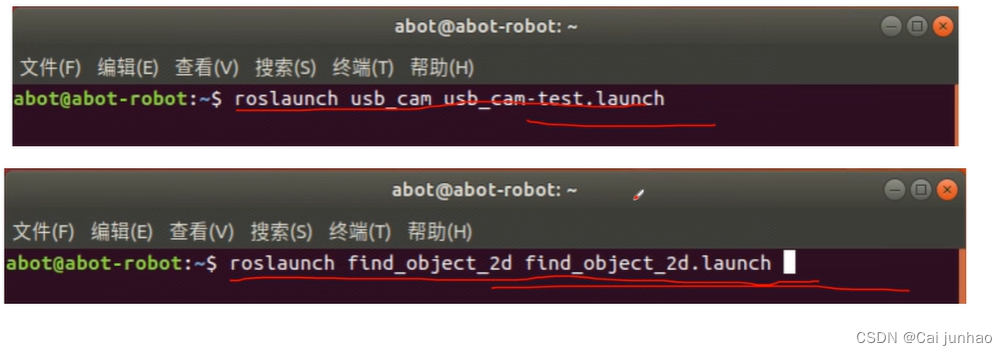
分别打开两个终端启动两个launch文件
启动摄像头:
roslaunch usb_cam usb_cam-test.launch
启动识别文件:
rolaunch find_object_2d find_object_2d.launch
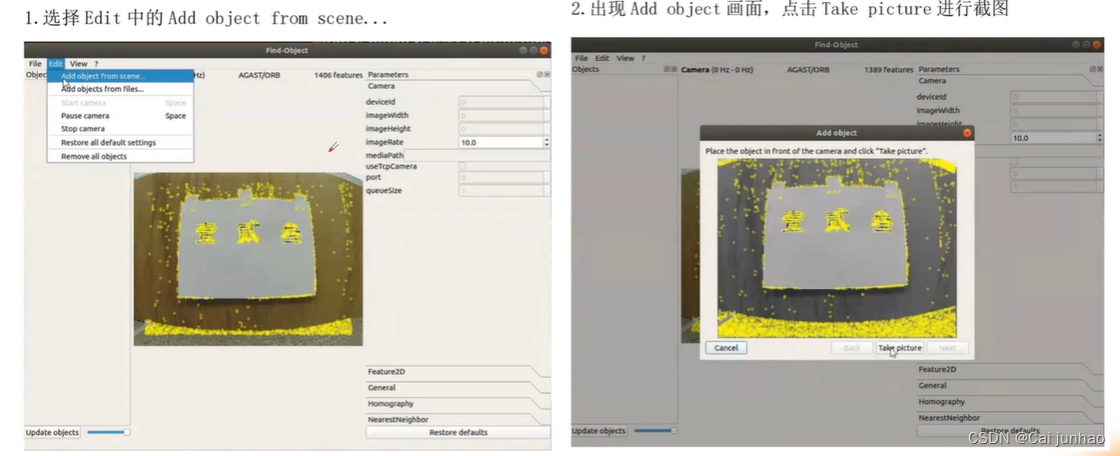
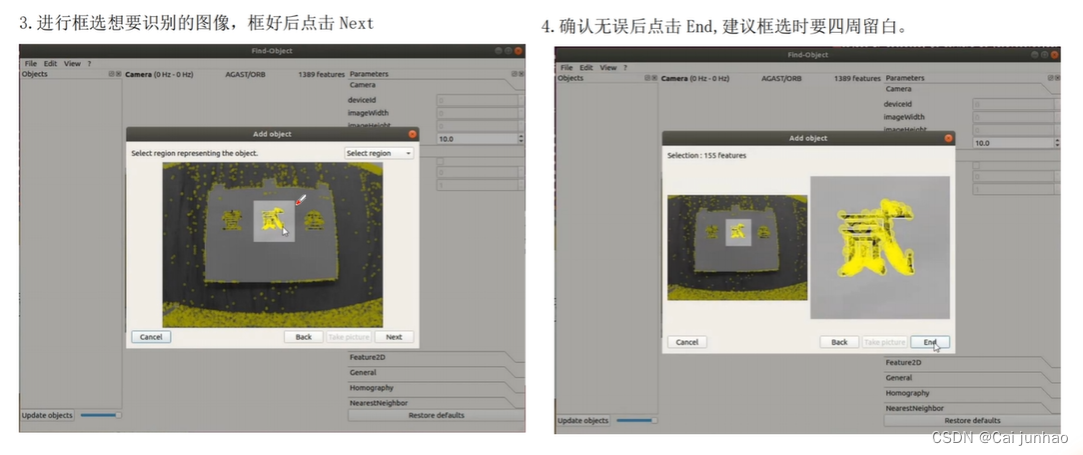
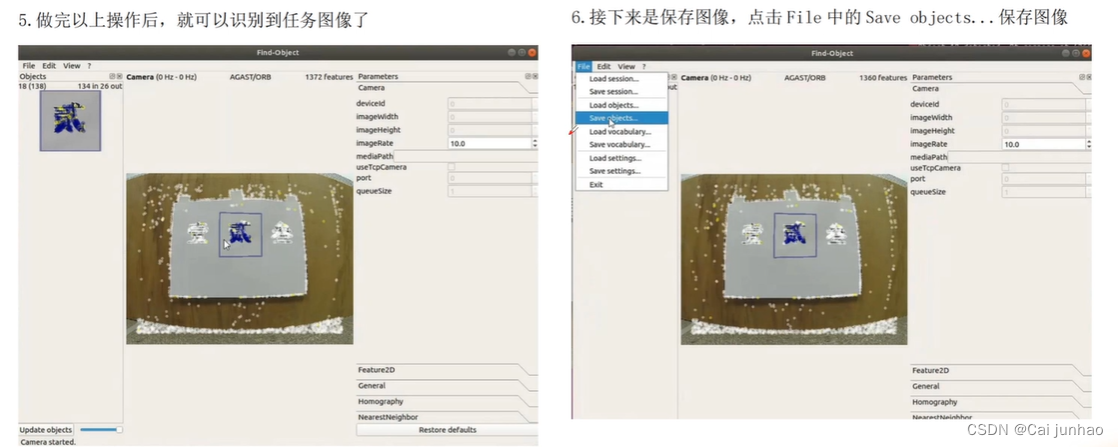
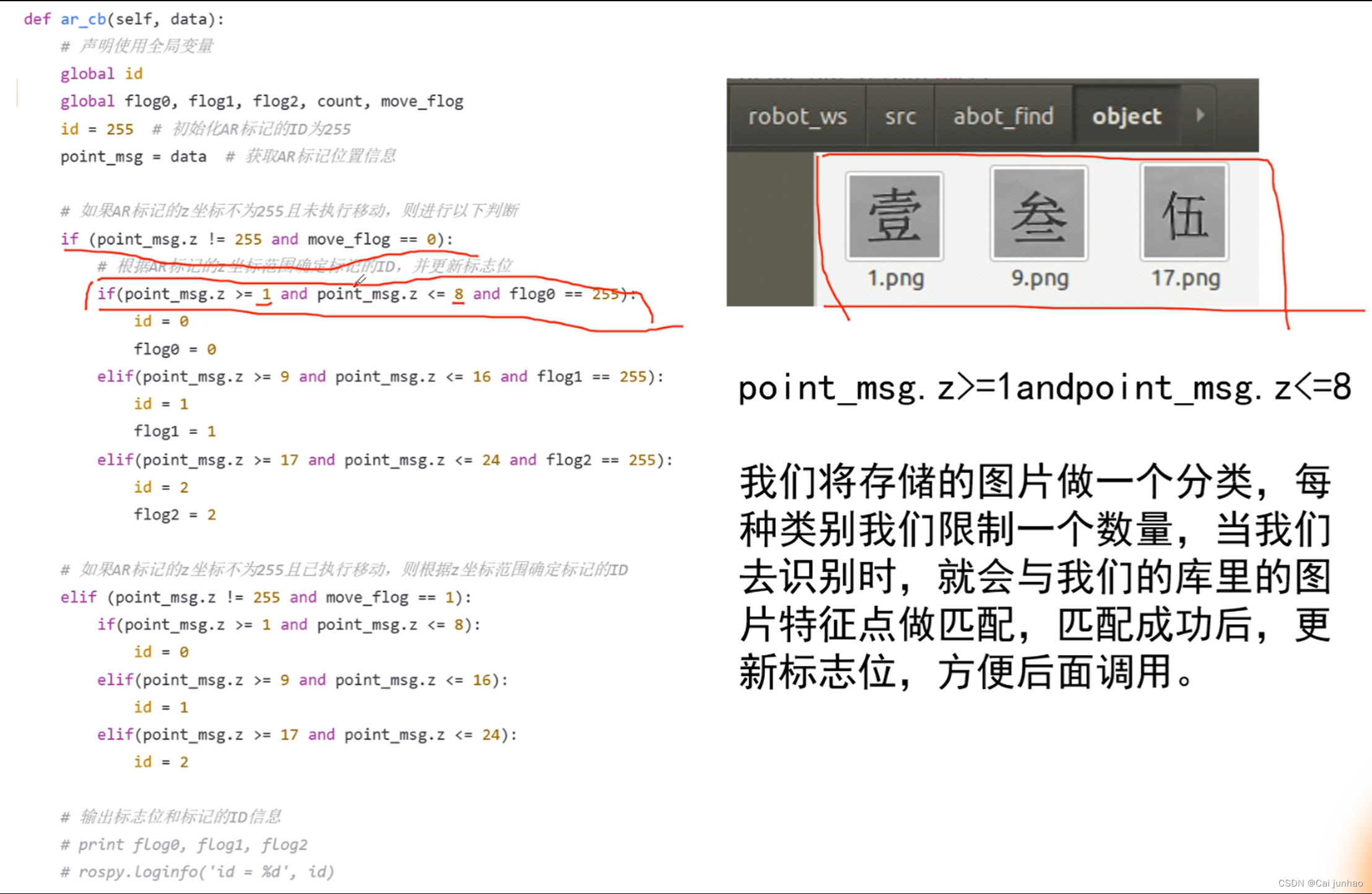
手动给图像做分类,z表示是命名名称
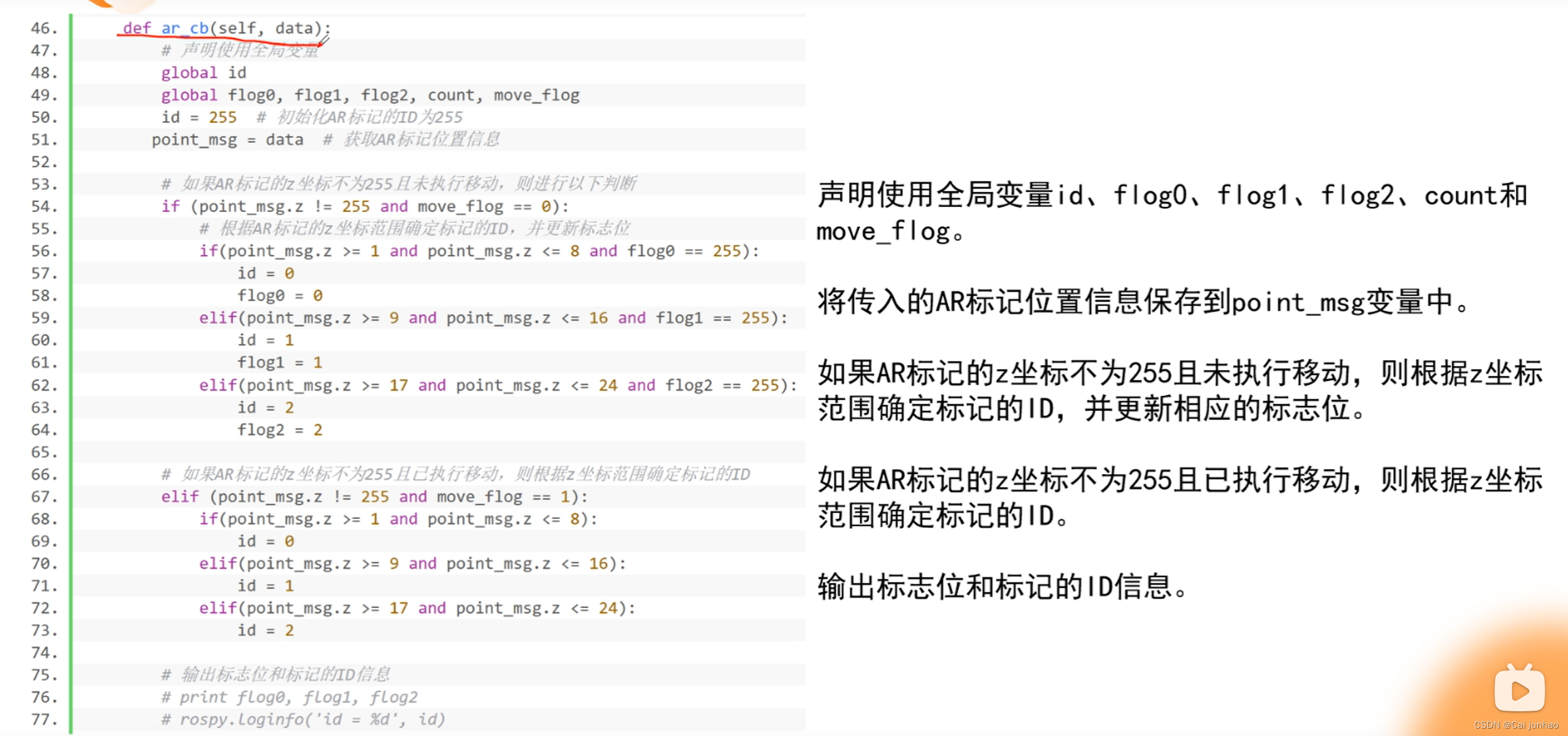
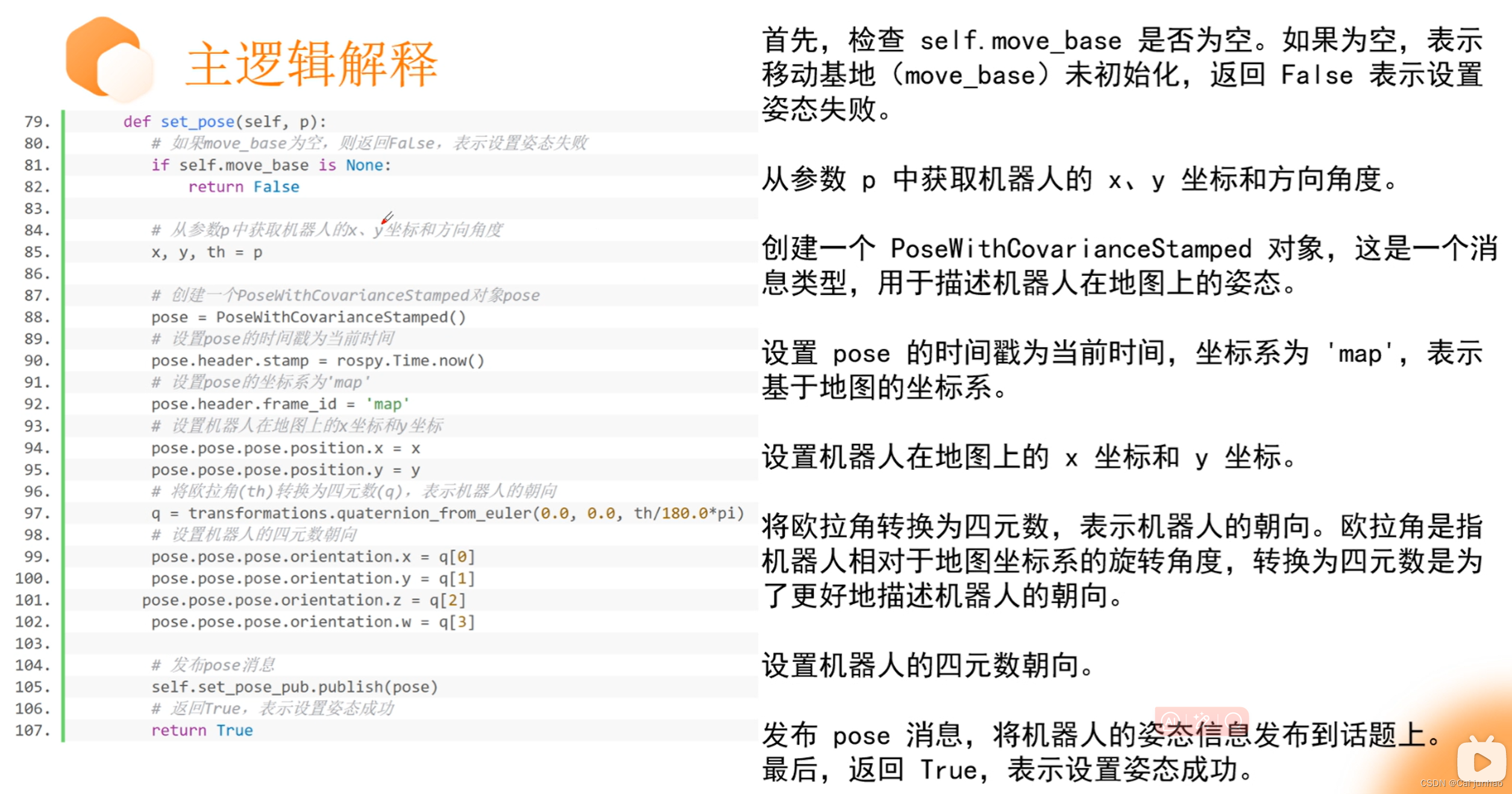
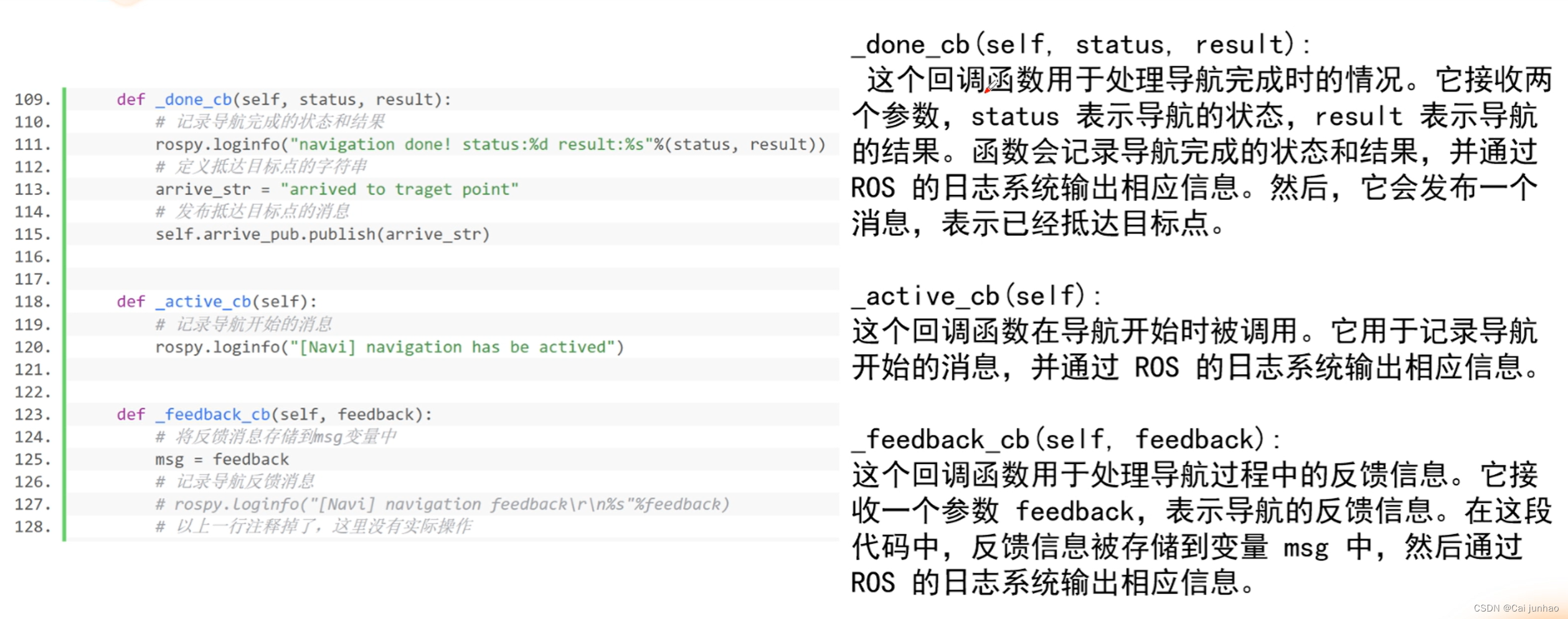
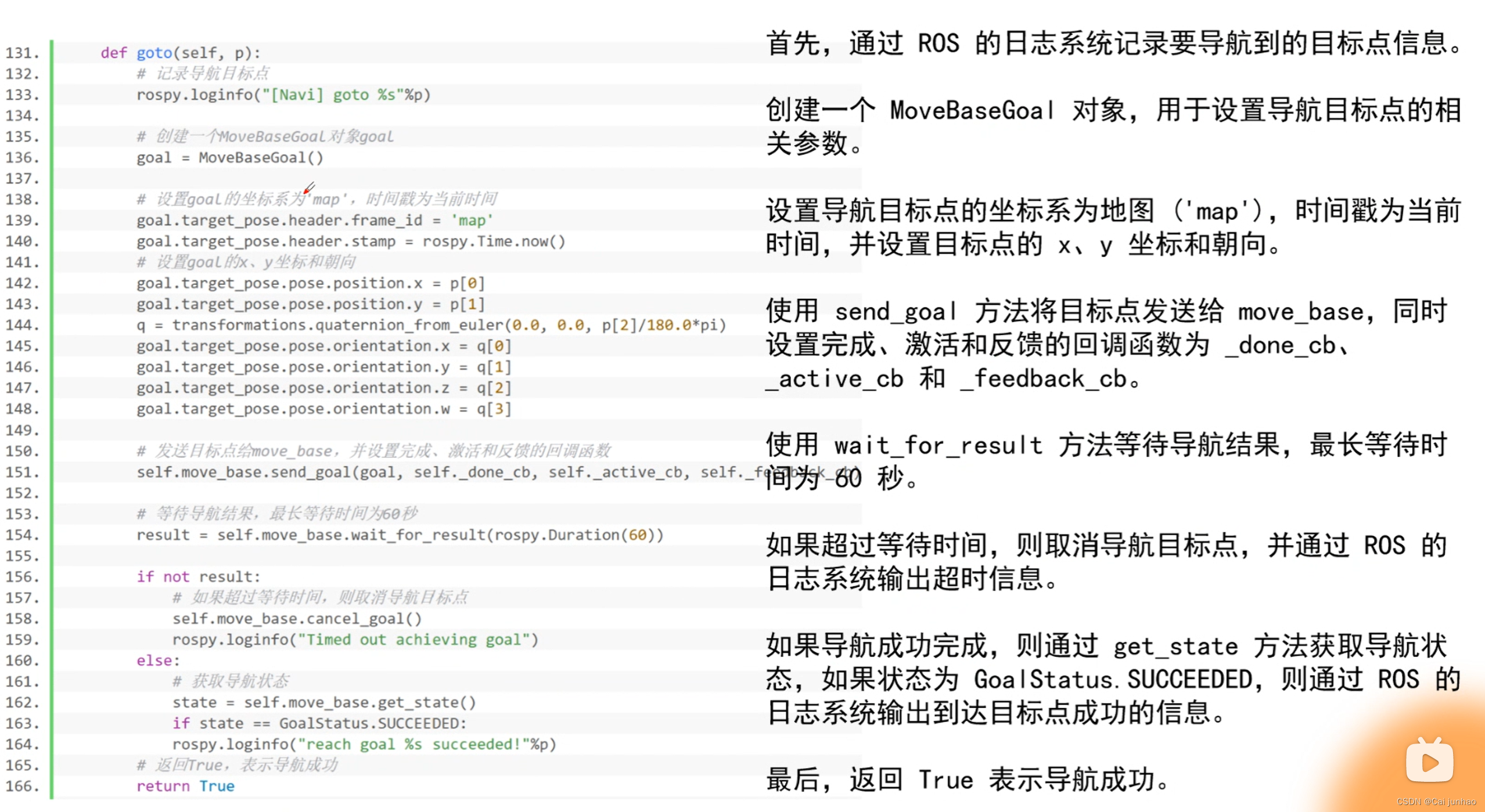
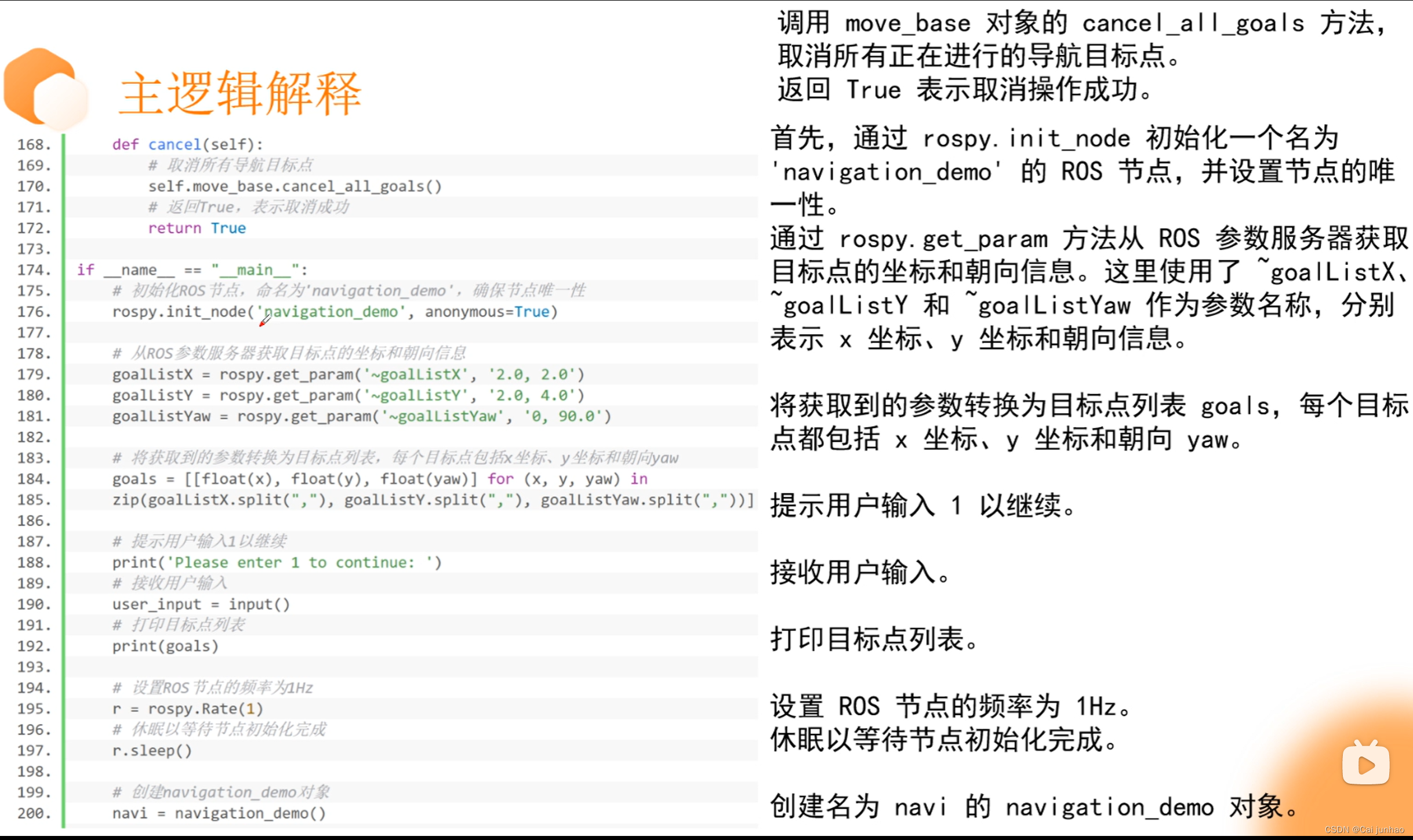
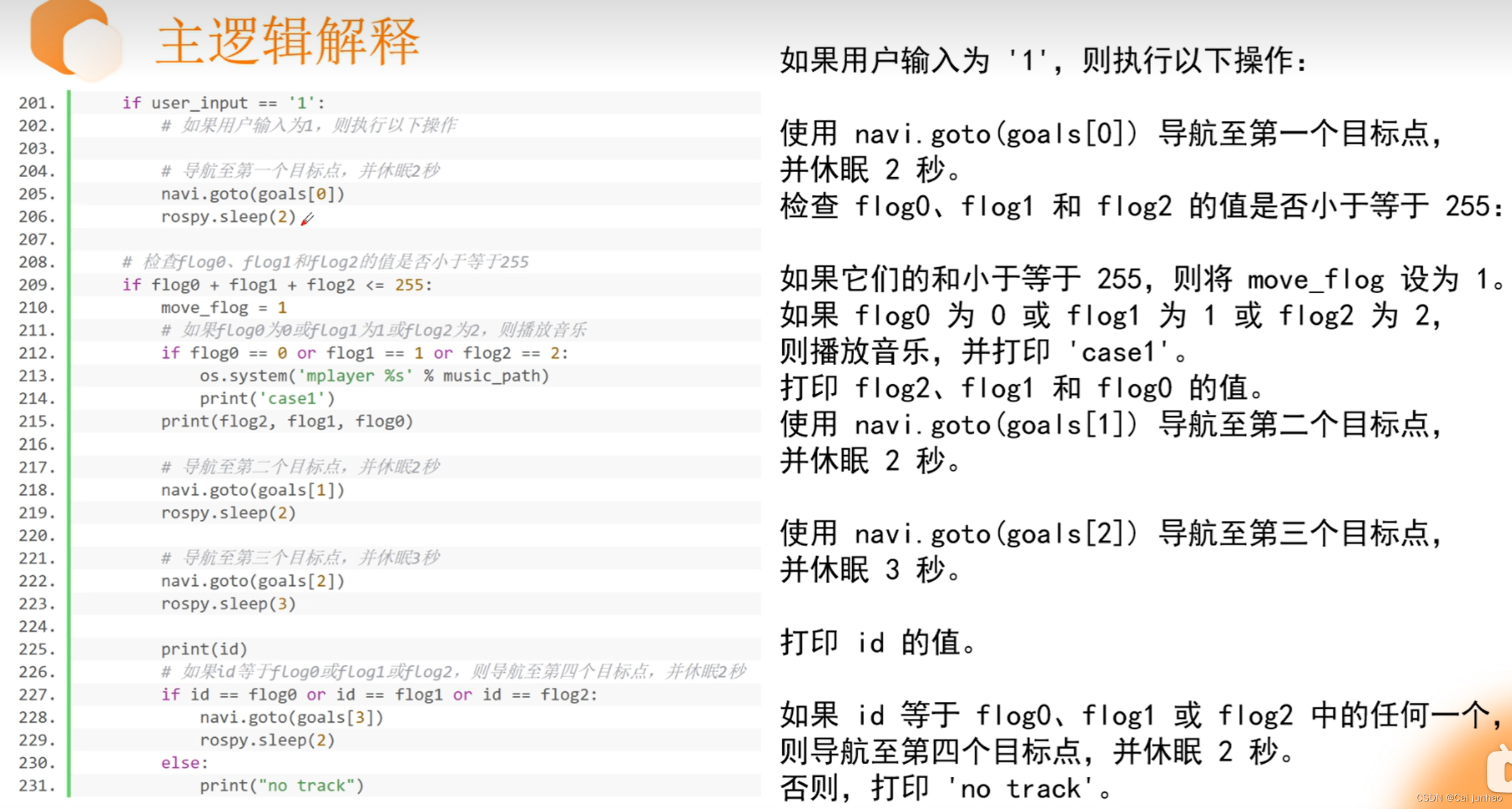
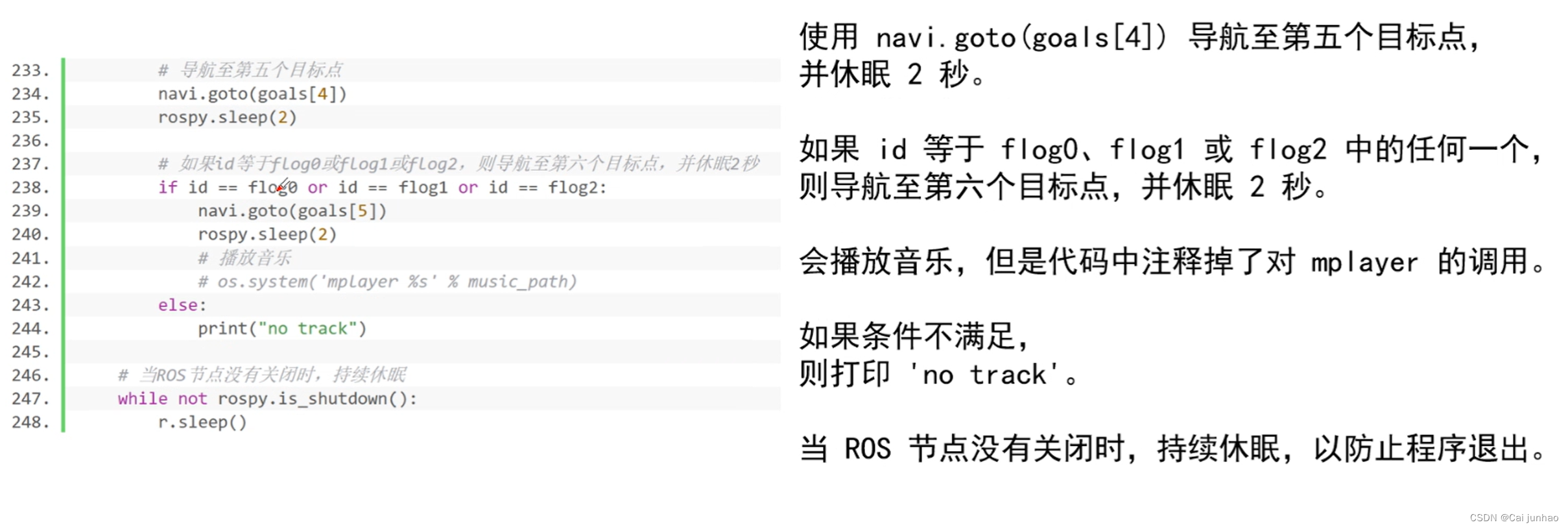
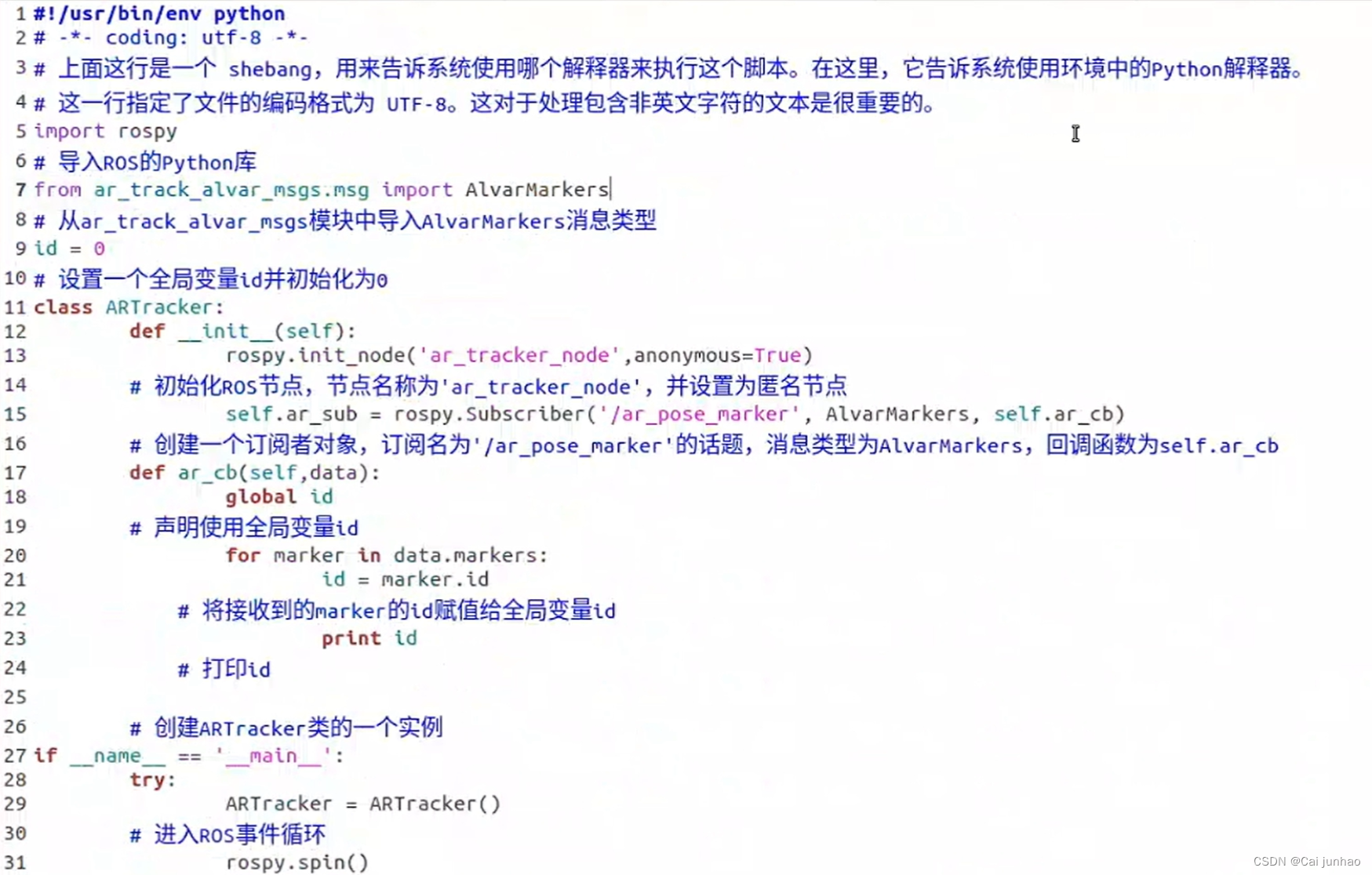
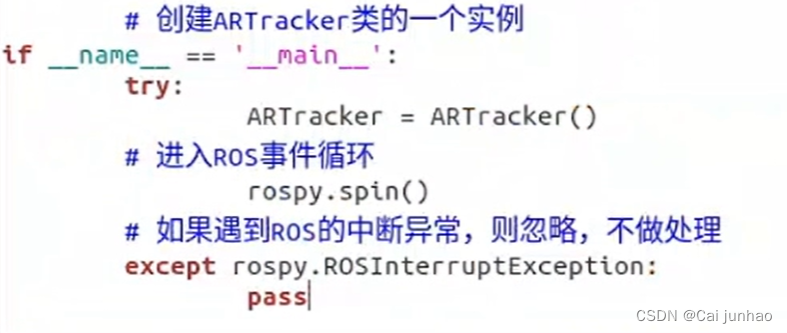
主逻辑理解
代码是
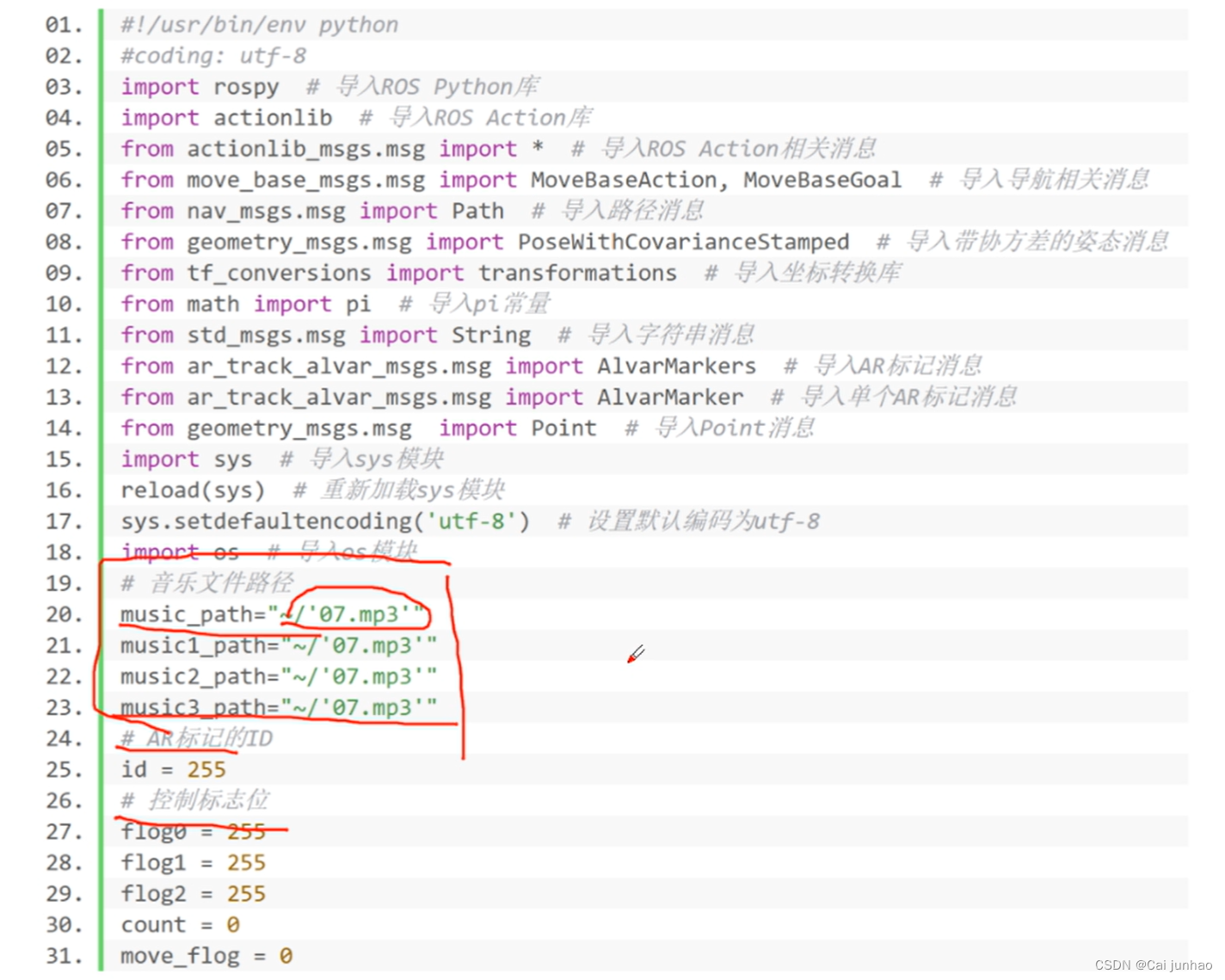
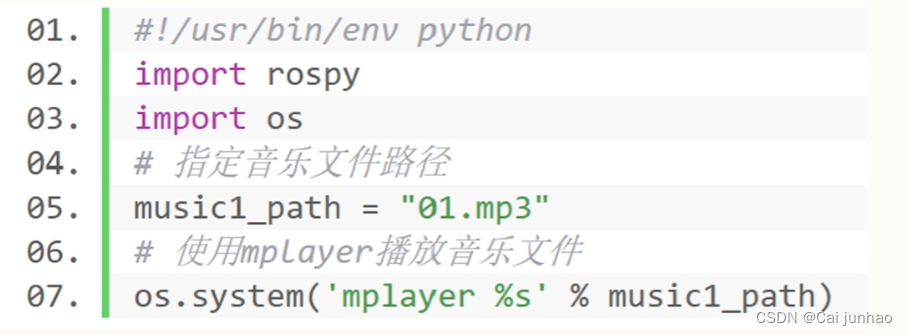
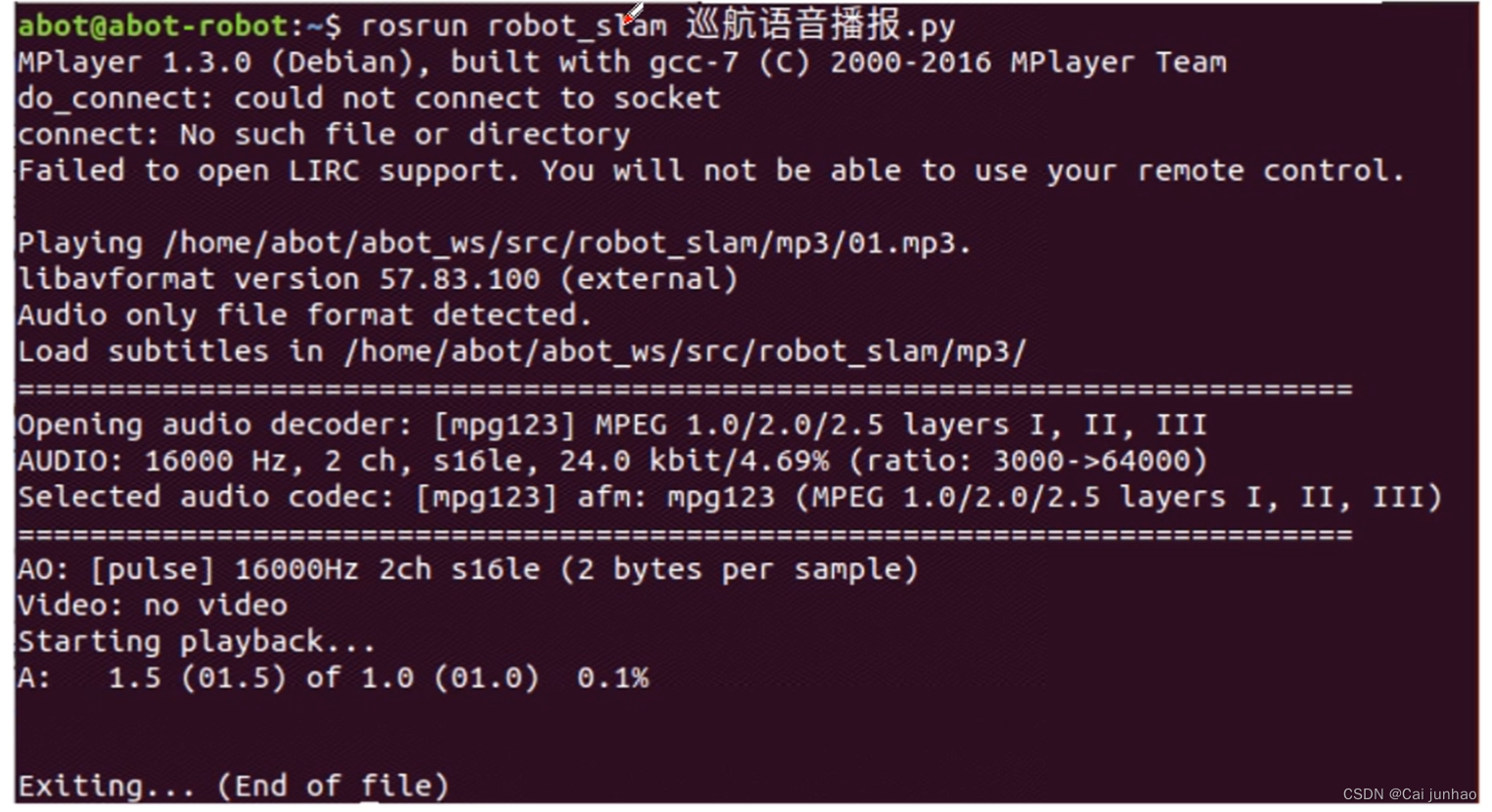
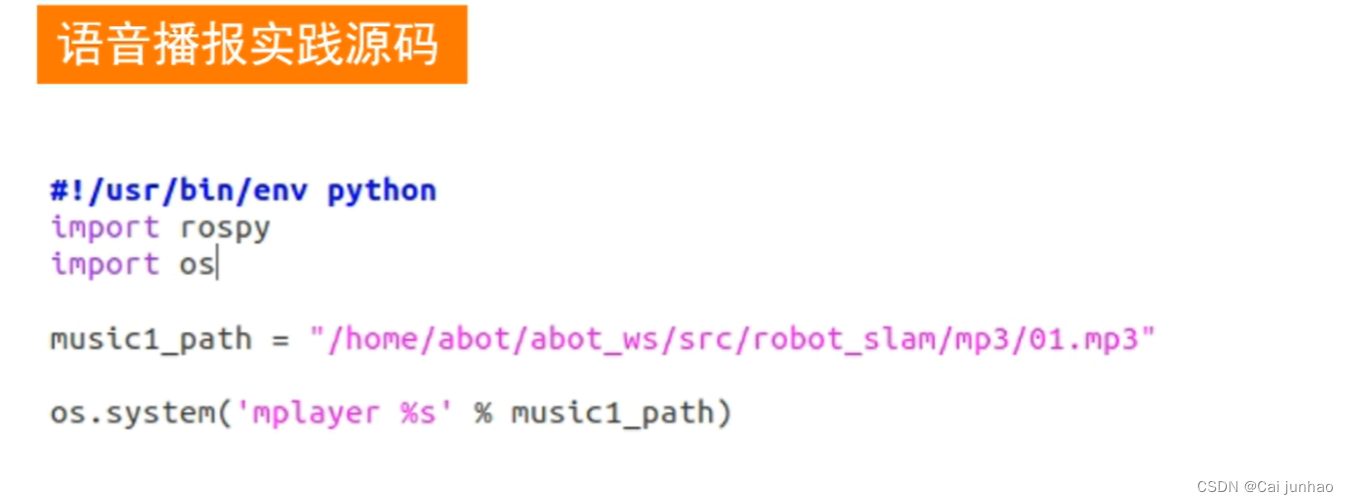
语音播报
使用os.system('mplayer %s' % music1_path)这行代码,通过系统调用来执行mplayer命令并播放指定的音乐文件。music_path指定了要播放的音乐文件路径
查看当前路径:pwd
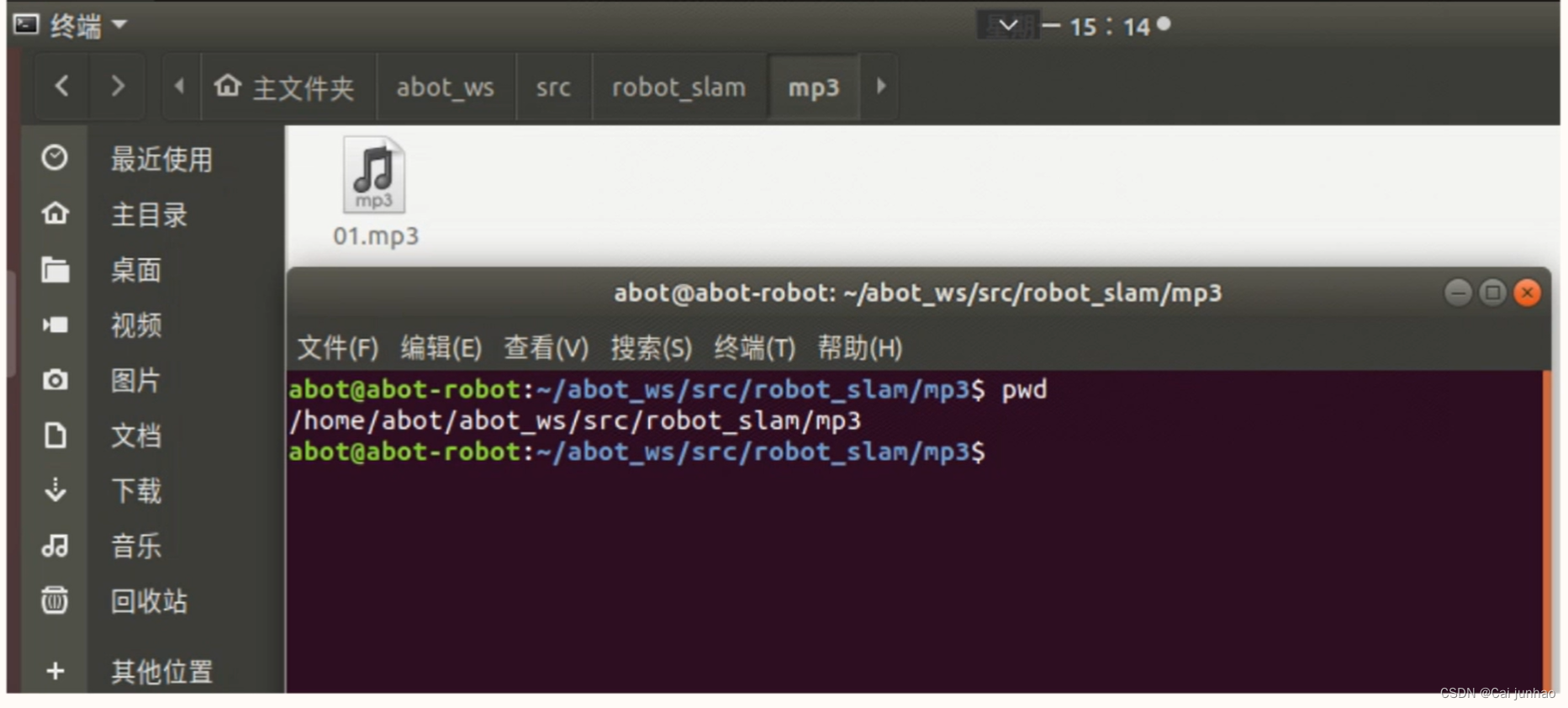
语音播放识别成功:
没有听到声音:查看扬声器信道
没有运行成功:查看代码格式
可以用TTS文本转语音
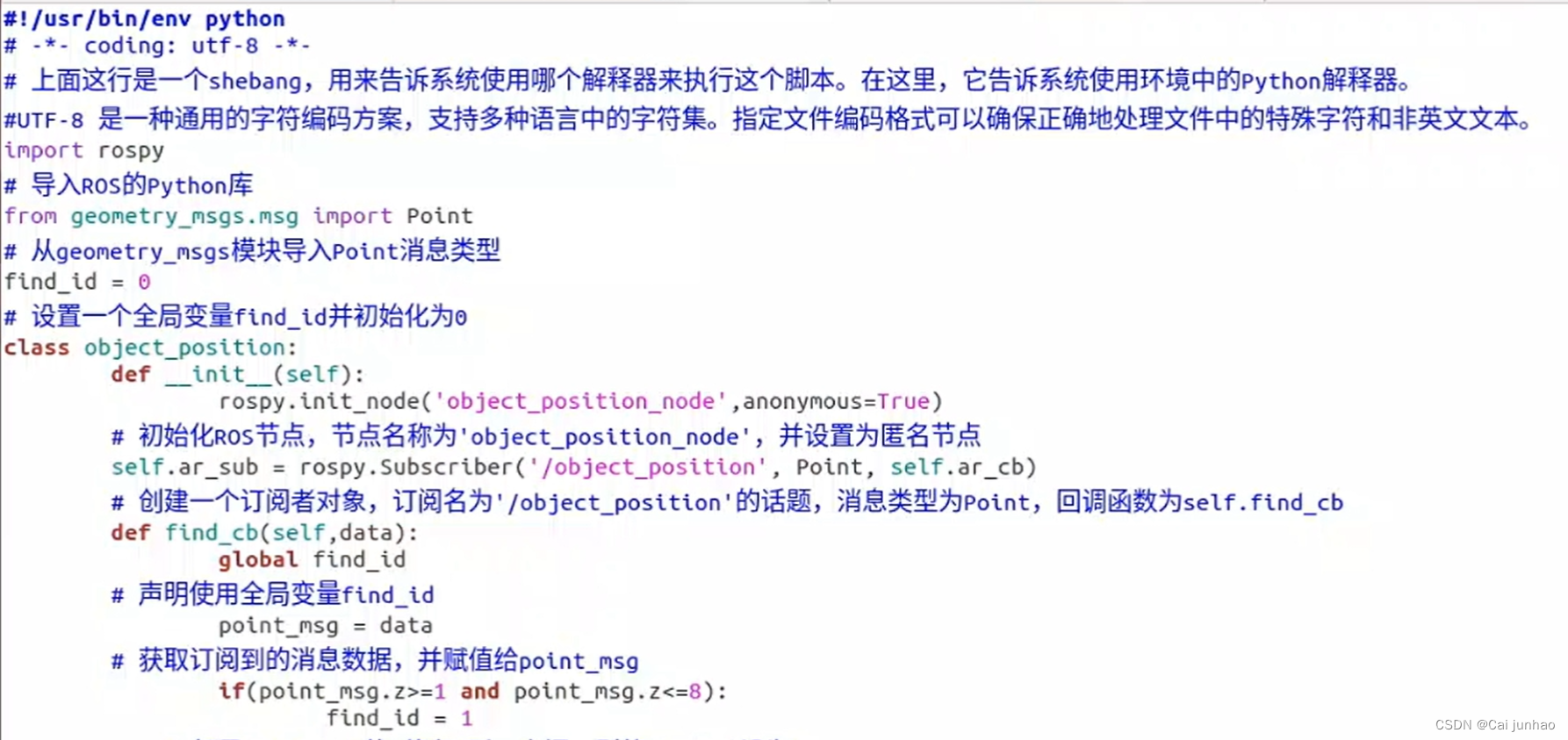
模块匹配
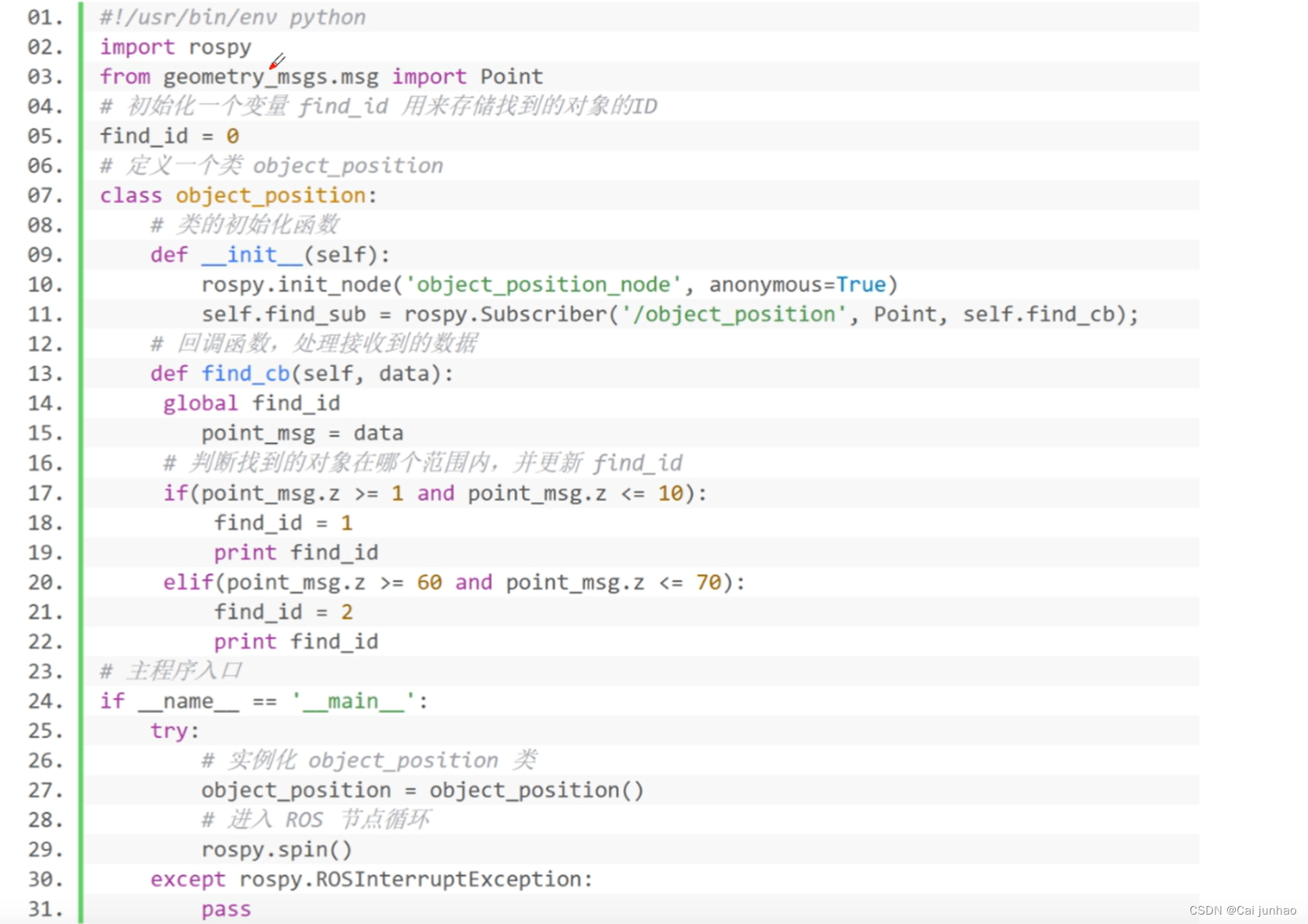
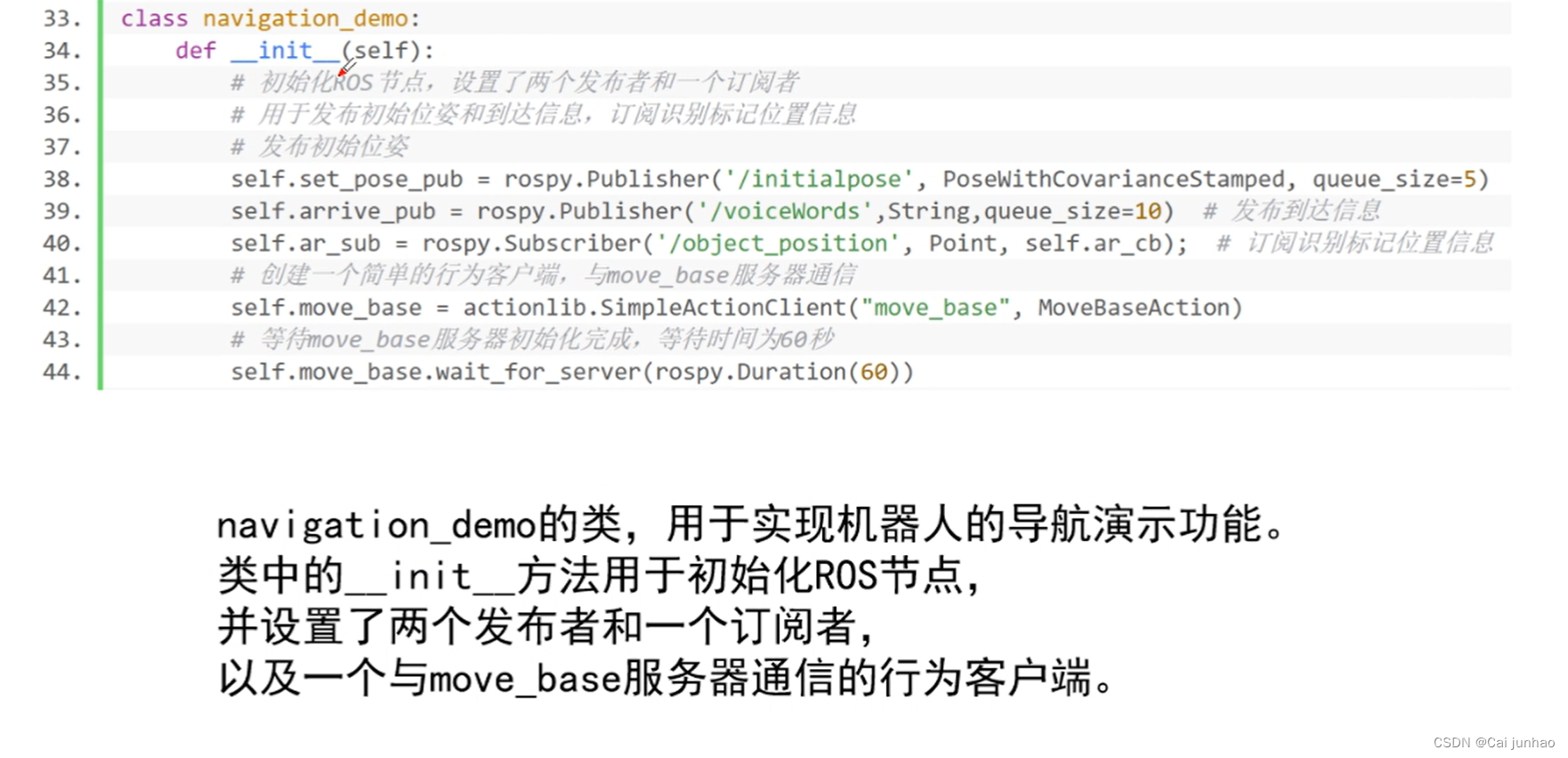
self.find_sub = rospy.Subscriber('/object_position',Point,self.find_cb);
创建了一个订阅者(Subscriber),用于接受名为/object.position的话题发布的geometry_msgs.msg.Point类型的消息,并将其传递给self.find_cb方法进行处理。
rospy.Subscriber:创建一个订阅者对象
'/object_position:指令要订阅的话题名称
Point:指令要订阅的消息类型,即geometry_msgs.msg.Point
'self.find_cb’是回调函数,当从/object_position话题接受到消息是,该函数将调用来处理接收到的消息
通过这行代码,节点将订阅/object_position话题,一旦有新的geometry_msgs.msg.Point类型的消息发布到该话题上,self.find_cb将会被调用来处理接收到的消息数据
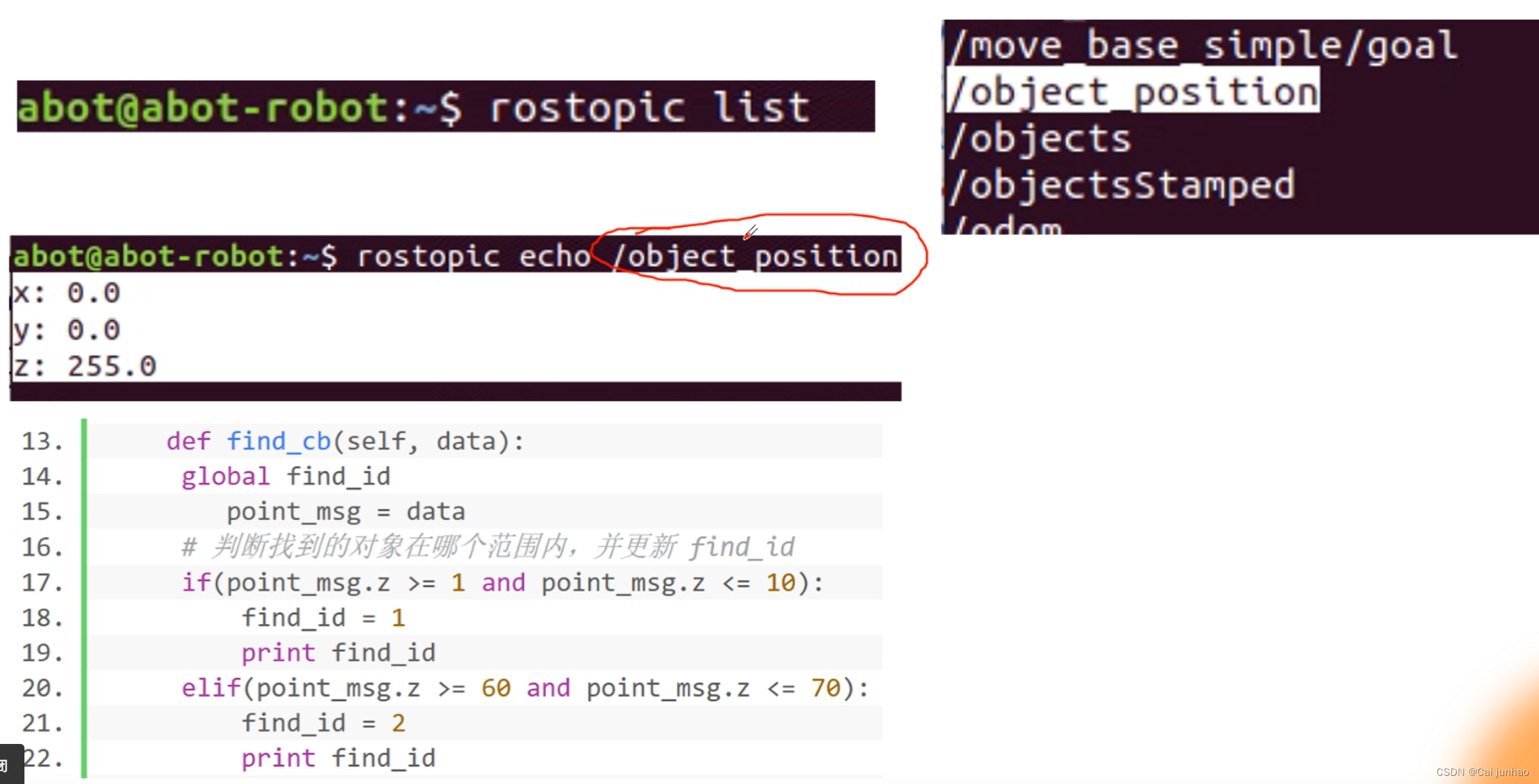
列出当前系统中所有已发布和已订阅的话题:
rostopic list
查看名为 /object_position的话题上的消息:
rostopic echo /object_position
启动摄像头和识别软件:
roslaunch usb_cam-test.launch
roslaunch find_object_2d find_object_2d.launch
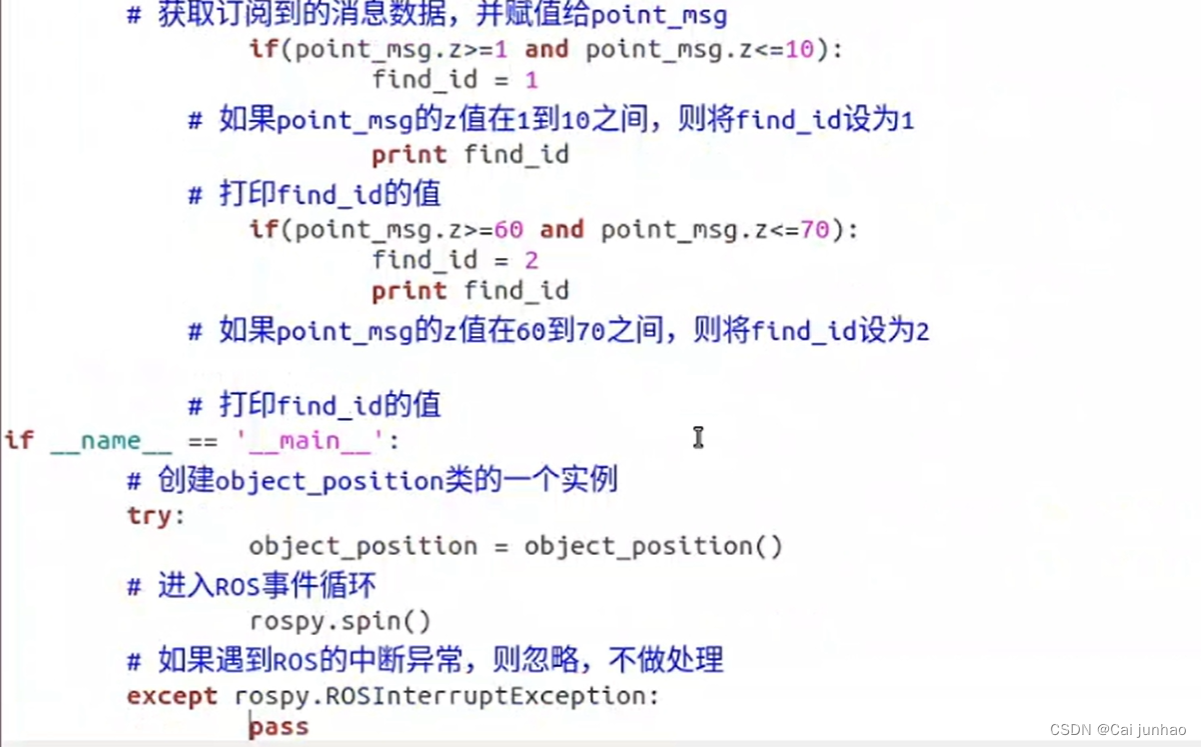
代码具体含义:
二维码识别
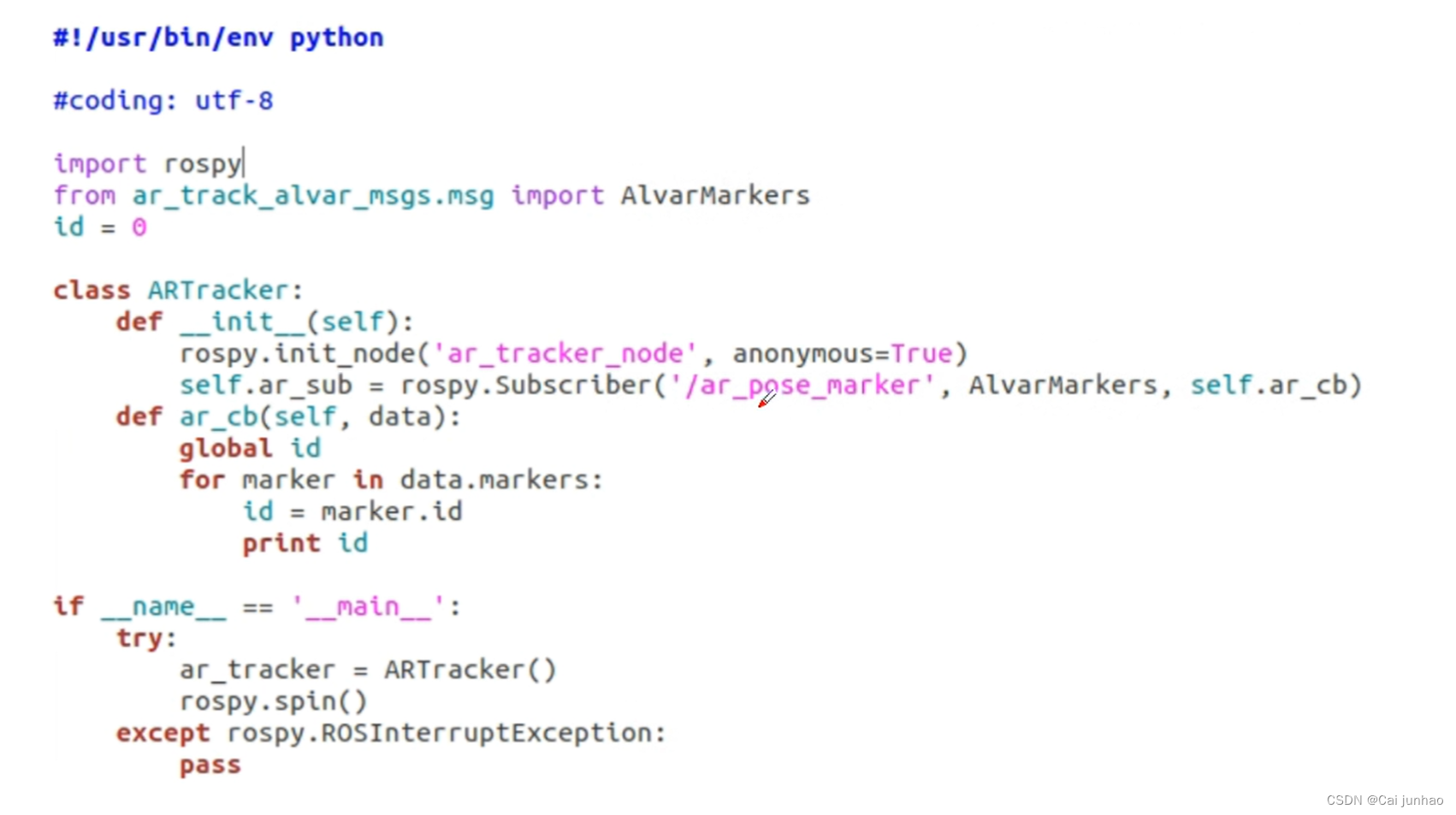
代码具体含义:
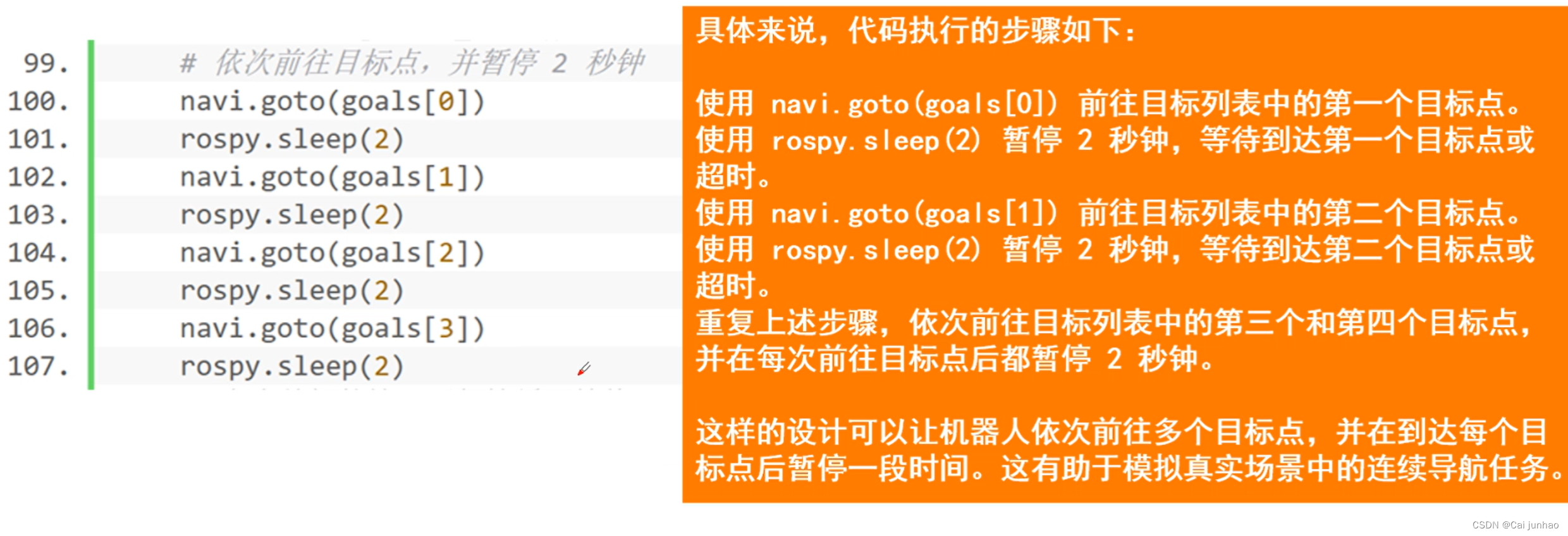
多点导航

讲解视频
1.万创鑫诚.自主巡航方案分析
2.万创鑫诚.自主巡航实践
其余篇章
1.【机器人和人工智能——自主巡航赛项】基础篇
2.【机器人和人工智能——自主巡航赛项】动手实践篇
相关文章:
【机器人和人工智能——自主巡航赛项】进阶篇
文章目录 案例要求创建地图rviz仿真 保存地图坐标点定位识别训练主逻辑理解语音播报模块匹配二维码识别多点导航讲解视频其余篇章 案例要求 创建地图 ./1-gmapping.sh 把多个launch文件融合在sh文件里面 rviz仿真 rviz是rose集成的可视化界面,查看机器人的各项数…...
]C语言字符串探秘)
[大师C语言(第二十五篇)]C语言字符串探秘
引言 字符串是编程中不可或缺的基本数据类型之一,它用于表示和操作文本数据。在C语言中,字符串以一种独特的方式实现,与许多其他编程语言的处理方式不同。本文将深入探讨C语言字符串背后的技术,帮助你更好地理解和应用字符串。 …...
xLua(一) 环境安装笔记
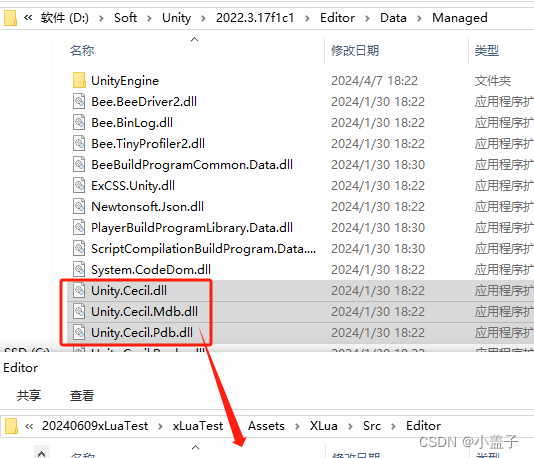
为了方便查阅记录一下xLua的安装地址及方法 1.登录地址下载: https://github.com/Tencent/xLua 2.解压文件 将文件中的这些内容拷贝到项目中的Asset文件夹中 注意 : 工程项目路径不得含有中文 3.将Tools复制到Asset同级目录下 4.导入后会发现有Bug,需要导入工程 5.还有另…...

Python基础教程(十一):数据结构汇总梳理
💝💝💝首先,欢迎各位来到我的博客,很高兴能够在这里和您见面!希望您在这里不仅可以有所收获,同时也能感受到一份轻松欢乐的氛围,祝你生活愉快! 💝Ὁ…...

制造型企业图纸泄露问题,如何从根源解决核心文件资料泄露问题?
制造型企业最核心重要的文件当然是图纸,图纸在制造型企业中起到关键主导地位,如果图纸泄露与研发性企业源代码被泄露一样的严重,制造型企业如何保护核心图纸不被外泄是企业在日常经营过程中的重要组成部分,现在有很多防止泄露的产…...
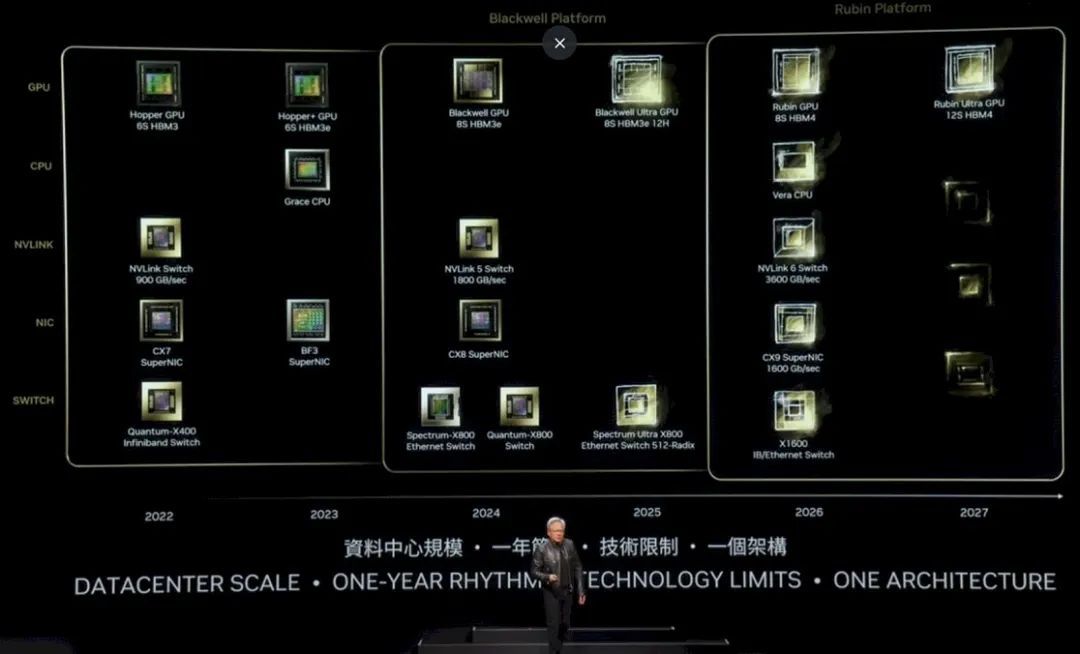
英伟达最新GPU和互联路线图分析
Nvidia在计算、网络和图形领域独树一帜,其显著优势在于雄厚的资金实力及在生成式人工智能市场的领先地位。凭借卓越的架构、工程和供应链,Nvidia能够自由实施创新路线图,引领行业未来。 到 21 世纪,Nvidia 已经是一个非常成功的创…...

Github 2024-06-10 开源项目日报 Top10
根据Github Trendings的统计,今日(2024-06-10统计)共有10个项目上榜。根据开发语言中项目的数量,汇总情况如下: 开发语言项目数量C项目2Go项目2PHP项目1Blade项目1TypeScript项目1Lua项目1Dart项目1Swift项目1Cuda项目1Python项目1MDX项目1Ventoy: 100%开源的可启动USB解决方…...

前后端分离项目中Spring Boot返回的时间与前端相差8个小时
概述 今天在做一个前后端分离项目时,发现从后端获取的时间与从数据库获取的时间相差八个小时,最终排查后发现由于Springboot使用本地时区导致,修改SpringBoot时区后解决 环境 MySQL8SpringBoot 原因排查 发现从后端获取的数据总是比前端快八个小时 …...
stm32MP135裸机编程:使用USB/UART烧录程序到SD卡并从SD卡启动点亮一颗LED灯
0 参考资料 轻松使用STM32MP13x - 如MCU般在cortex A核上裸跑应用程序.pdf STM32CubeProgrammer v2.16.0 烧录需要的二进制文件1 烧录到SD卡需要哪些文件 参考《轻松使用STM32MP13x - 如MCU般在cortex A核上裸跑应用程序》,烧录需要的SD卡文件如下: &a…...

【NoSQL数据库】Redis Cluster集群(含redis集群扩容脚本)
Redis Cluster集群 Redis ClusterRedis 分布式扩展之 Redis Cluster 方案功能数据如何进行存储 redis 集群架构集群伸缩向集群中添加一个新的master节点,并向其中存储 num10 .脚本对redis集群扩容缩容,脚本参数为redis集群,固定从6001移动200…...
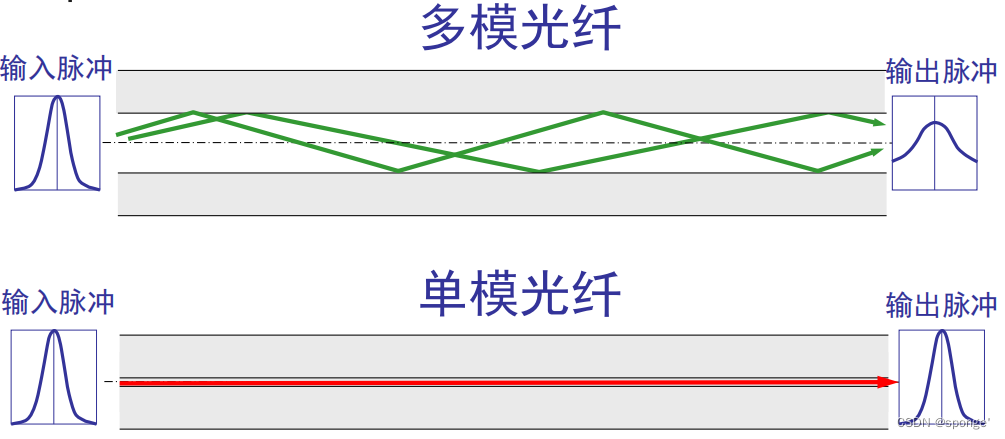
重邮计算机网络803-(2)物理层
一.物理层 1.介绍 物理层的主要任务描述为确定与传输媒体的接口的一些特性,即: ①机械特性 指明接口所用接线器的形状和尺寸、引线数目和排列、固定和锁定装置等等。 ②电气特性 指明在接口电缆的各条线上出现的电压的范围。 ③功能特性 指明某条线上…...

uniapp使用webview内嵌H5的注意事项
一、描述 uniapp项目中构建app,需要内嵌H5页面,在使用webview时,遇到了以下几个问题: 内嵌H5,默认全屏显示;内嵌页面遮挡住了app的自定义tabbar组件;样式修改无效; 二、解决方案&a…...

现代 C++的高效并发编程模式
现代C提供了许多高效的并发编程模式,以满足日益增长的多核和分布式系统的需求。以下是一些常用的高效并发编程模式: 异步编程:使用std::async来创建异步任务,可以在后台执行任务,将结果返回给调用者。 并行编程&#…...
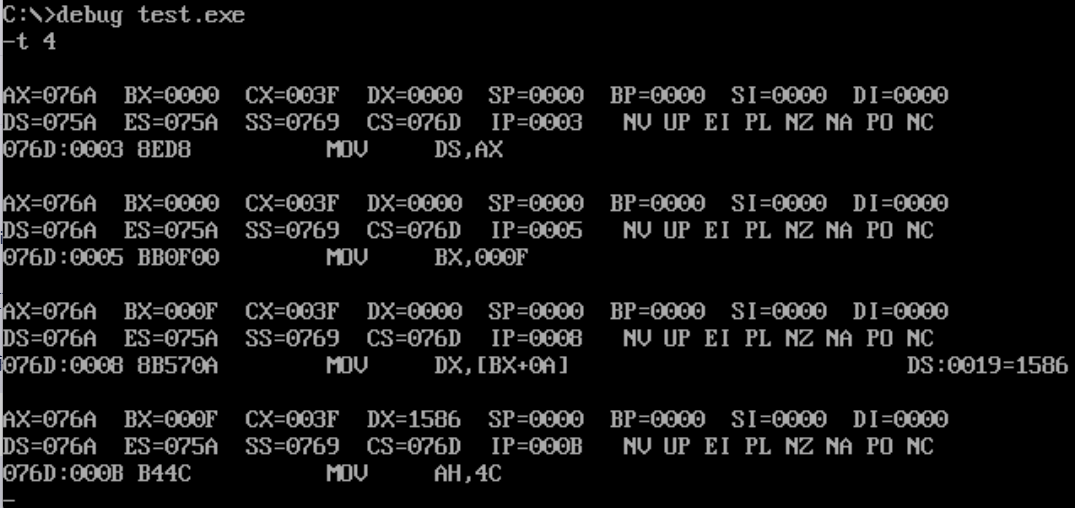
汇编语言作业(五)
目录 一、实验目的 二、实验内容 三、实验步骤以及结果 四、实验结果与分析 五、 实验总结 一、实验目的 1.熟悉掌握汇编语言的程序结构,能正确书写数据段、代码段等 2,利用debug功能,查看寄存器(CS,IP,AX,DS..)及数据段的…...
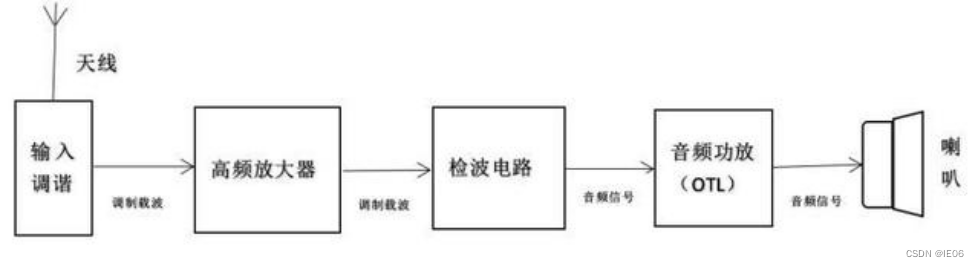
收音机的原理笔记
1. 收音机原理 有线广播:我们听到的声音是通过空气振动进行传播,因此可以通过麦克风(话筒)将这种机械振动转换为电信号,传到远处,再重新通过扬声器(喇叭)转换为机械振动,…...

排序算法案例
排序算法概述 排序算法是计算机科学中的一个重要主题,用于将一组数据按特定顺序排列。排序算法有很多种,每种算法在不同情况下有不同的性能表现。不同的排序算法适用于不同的场景和数据特征。在选择排序算法时,需要考虑数据规模、数据分布以…...

时间序列评价指标
评价指标 均方误差( M S E MSE MSE) 定义:预测值与实际值之间差异的平方和的平均值。公式: ( M S E 1 n ∑ i 1 n ( y i − y ^ i ) 2 ) (MSE \frac{1}{n}\sum_{i1}^{n}(y_i - \hat{y}_i)^2) (MSEn1∑i1n(yi−y^i)…...
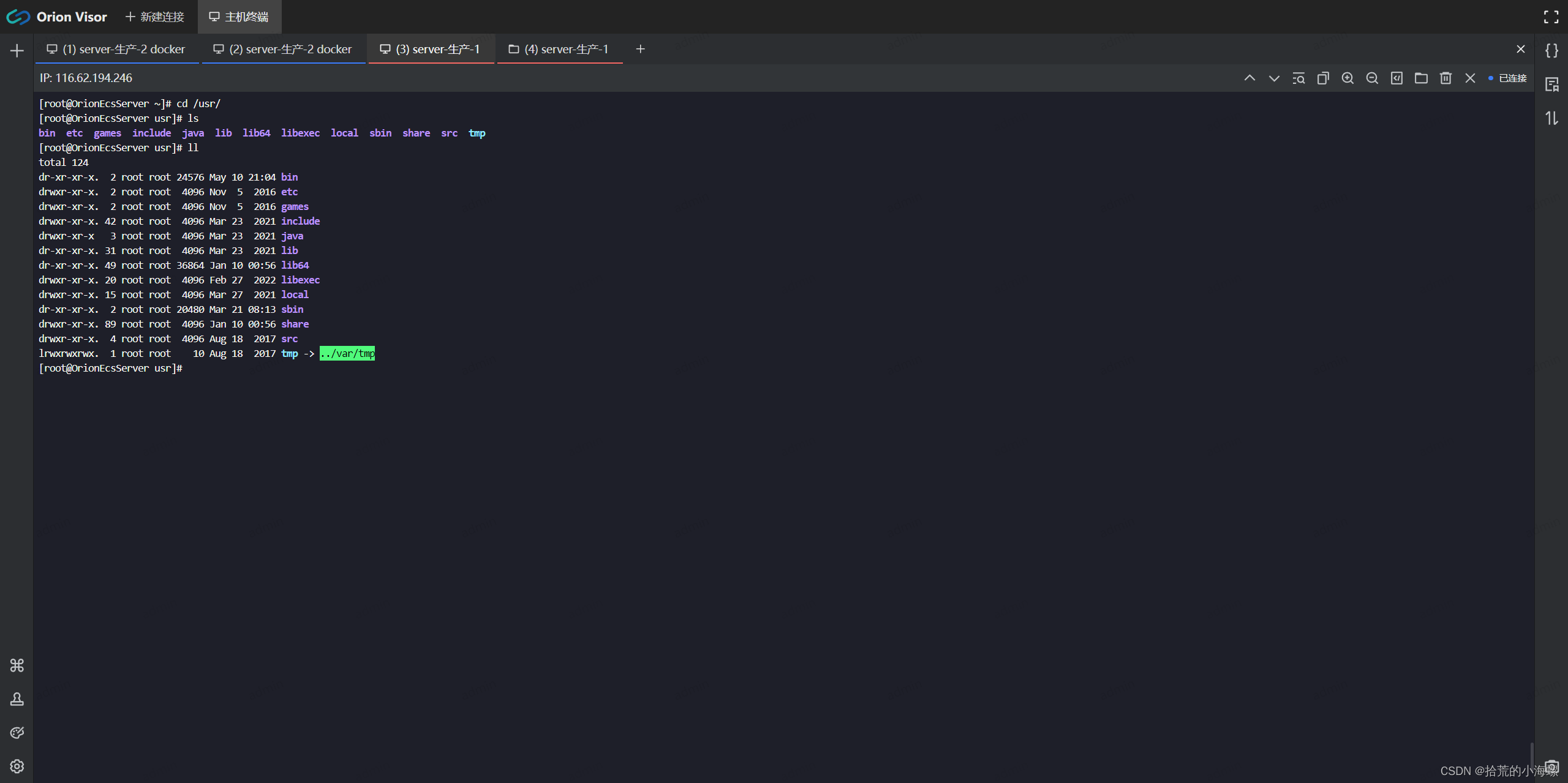
Docker:安装 Orion-Visor 服务器运维的技术指南
请关注微信公众号:拾荒的小海螺 博客地址:http://lsk-ww.cn/ 1、简述 Orion-Visor 是一种用于管理和监控容器的工具。它提供了一个直观的界面,用于查看容器的状态、资源使用情况以及日志等信息。在这篇技术博客中,我们将介绍如何…...
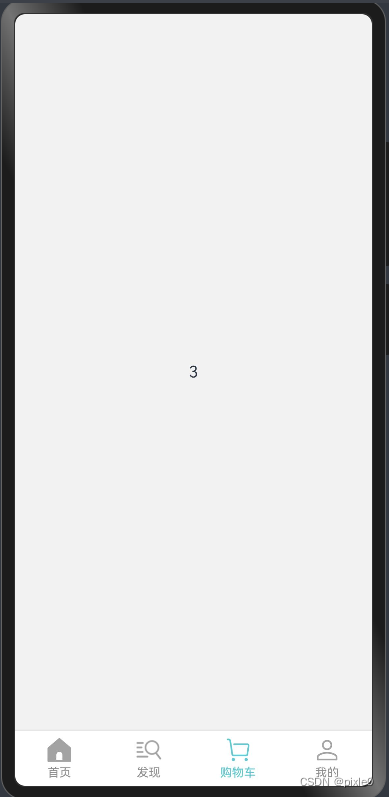
HarmonyOS Next 系列之底部标签栏TabBar实现(三)
系列文章目录 HarmonyOS Next 系列之省市区弹窗选择器实现(一) HarmonyOS Next 系列之验证码输入组件实现(二) HarmonyOS Next 系列之底部标签栏TabBar实现(三) 文章目录 系列文章目录前言一、实现原理二、…...
mac怎么录制屏幕?这2个方法你值得拥有
在数字化时代,屏幕录制已经成为一种常见且重要的工具,无论是教学演示、游戏直播还是会议记录,屏幕录制都发挥着不可或缺的作用。对于Mac用户而言,如何高效、便捷地进行屏幕录制,是一个值得探讨的话题,可是很…...

web vue 项目 Docker化部署
Web 项目 Docker 化部署详细教程 目录 Web 项目 Docker 化部署概述Dockerfile 详解 构建阶段生产阶段 构建和运行 Docker 镜像 1. Web 项目 Docker 化部署概述 Docker 化部署的主要步骤分为以下几个阶段: 构建阶段(Build Stage):…...
《通信之道——从微积分到 5G》读书总结
第1章 绪 论 1.1 这是一本什么样的书 通信技术,说到底就是数学。 那些最基础、最本质的部分。 1.2 什么是通信 通信 发送方 接收方 承载信息的信号 解调出其中承载的信息 信息在发送方那里被加工成信号(调制) 把信息从信号中抽取出来&am…...

【Web 进阶篇】优雅的接口设计:统一响应、全局异常处理与参数校验
系列回顾: 在上一篇中,我们成功地为应用集成了数据库,并使用 Spring Data JPA 实现了基本的 CRUD API。我们的应用现在能“记忆”数据了!但是,如果你仔细审视那些 API,会发现它们还很“粗糙”:有…...
【Redis】笔记|第8节|大厂高并发缓存架构实战与优化
缓存架构 代码结构 代码详情 功能点: 多级缓存,先查本地缓存,再查Redis,最后才查数据库热点数据重建逻辑使用分布式锁,二次查询更新缓存采用读写锁提升性能采用Redis的发布订阅机制通知所有实例更新本地缓存适用读多…...

OD 算法题 B卷【正整数到Excel编号之间的转换】
文章目录 正整数到Excel编号之间的转换 正整数到Excel编号之间的转换 excel的列编号是这样的:a b c … z aa ab ac… az ba bb bc…yz za zb zc …zz aaa aab aac…; 分别代表以下的编号1 2 3 … 26 27 28 29… 52 53 54 55… 676 677 678 679 … 702 703 704 705;…...

适应性Java用于现代 API:REST、GraphQL 和事件驱动
在快速发展的软件开发领域,REST、GraphQL 和事件驱动架构等新的 API 标准对于构建可扩展、高效的系统至关重要。Java 在现代 API 方面以其在企业应用中的稳定性而闻名,不断适应这些现代范式的需求。随着不断发展的生态系统,Java 在现代 API 方…...
通过 Ansible 在 Windows 2022 上安装 IIS Web 服务器
拓扑结构 这是一个用于通过 Ansible 部署 IIS Web 服务器的实验室拓扑。 前提条件: 在被管理的节点上安装WinRm 准备一张自签名的证书 开放防火墙入站tcp 5985 5986端口 准备自签名证书 PS C:\Users\azureuser> $cert New-SelfSignedCertificate -DnsName &…...

2025年低延迟业务DDoS防护全攻略:高可用架构与实战方案
一、延迟敏感行业面临的DDoS攻击新挑战 2025年,金融交易、实时竞技游戏、工业物联网等低延迟业务成为DDoS攻击的首要目标。攻击呈现三大特征: AI驱动的自适应攻击:攻击流量模拟真实用户行为,差异率低至0.5%,传统规则引…...

云原生时代的系统设计:架构转型的战略支点
📝个人主页🌹:一ge科研小菜鸡-CSDN博客 🌹🌹期待您的关注 🌹🌹 一、云原生的崛起:技术趋势与现实需求的交汇 随着企业业务的互联网化、全球化、智能化持续加深,传统的 I…...

【2D与3D SLAM中的扫描匹配算法全面解析】
引言 扫描匹配(Scan Matching)是同步定位与地图构建(SLAM)系统中的核心组件,它通过对齐连续的传感器观测数据来估计机器人的运动。本文将深入探讨2D和3D SLAM中的各种扫描匹配算法,包括数学原理、实现细节以及实际应用中的性能对比,特别关注…...