【强化学习】强化学习数学基础:值函数近似
值函数近似
- Value Function Approximation
- Motivating examples: curve fitting
- Algorithm for state value estimation
- Objective function
- Optimization algorithms
- Selection of function approximators
- Illustrative examples
- Summary of the story
- Theoretical analysis
- Sarsa with function appriximation
- Q-learning with function approximation
- Deep Q-learning
- 内容来源
Value Function Approximation
Motivating examples: curve fitting
到目前为止,我们都是使用tables表示state和action values。例如,下表是action value的表示:
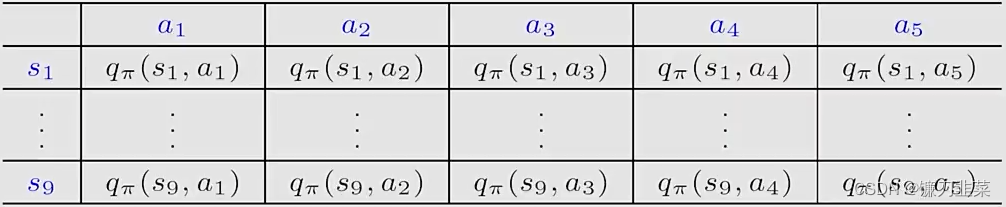
- 优势:直观且容易分析
- 劣势:难以处理较大或者连续的state或者action空间。两个方面:1)存储;2)泛化能力。
举个例子:假定有一个one-dimensional states s1,...,s∣S∣s_1,...,s_{|S|}s1,...,s∣S∣,当π\piπ是给定策略的时候,它们的state values是vπ(s1),...,vπ(s∣S∣)v_\pi(s_1),...,v_\pi(s_{|S|})vπ(s1),...,vπ(s∣S∣)。假设∣S∣|S|∣S∣非常大,因此我们希望用一个简单的曲线近似它们的点以降低内存:
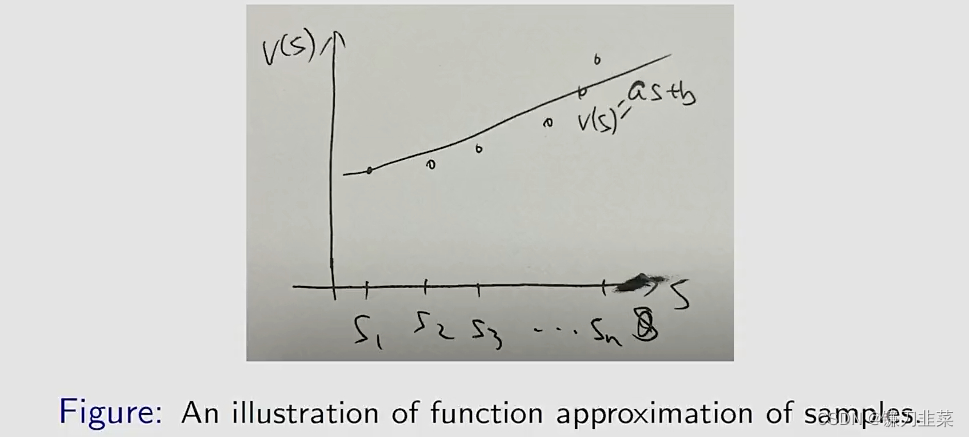
答案是可以的。
首先我们使用简单的straight line去拟合这些点。假设straight line的方程为

其中:
- www是参数向量(parameter vector)
- ϕ(s)\phi(s)ϕ(s)是s的特征向量(feature vector)
- v^(s,w)\hat{v}(s,w)v^(s,w)与www成线性关系(当然,也可以是非线性的)
这样表示的好处是:
- 表格形式需要存储∣S∣|S|∣S∣个state values,现在,只需要存储两个参数aaa和bbb
- 每次我们想要使用s的值,我们可以计算ϕT(s)w\phi^T(s)wϕT(s)w。
- 但是这个好处也不是免费的,它需要付出一些代价:state values不能被精确地表示,这也是为什么这个方法被称为value approximation。
既然直线不够准确,那么是否可以使用高阶的曲线呢?当然可以。第二,我们使用一个second-order curve去拟合这些点:
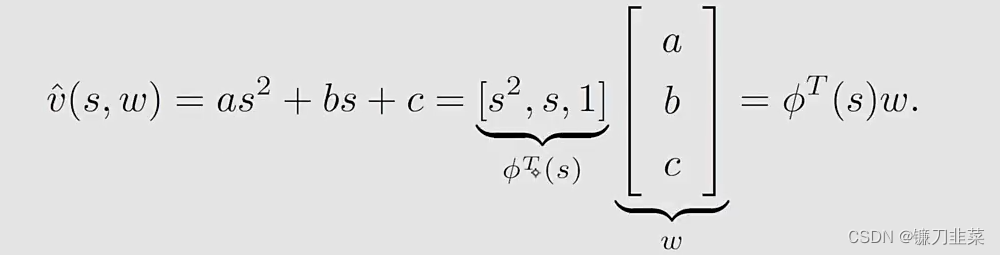
在这种情况下:
- www和ϕ(s)\phi(s)ϕ(s)的维数增加了,但是values可以被拟合的更加精确。
- 尽管v^(s,w)\hat{v}(s,w)v^(s,w)与sss是非线性的,但是它与www是线性的。这种非线性的性质包含在ϕ(s)\phi(s)ϕ(s)中。
当然,还可以继续增加阶数。第三,使用一个更加high-order polynomial curves(多项式曲线)或者其他复杂的曲线来拟合这些点:
- 好处是:更好的approximate
- 坏处是:需要更多的parameters
小结一下:
- Idea:value function approximation的idea是用一个函数v^(s,w)\hat{v}(s, w)v^(s,w)来拟合vπ(s)v_\pi(s)vπ(s),这个函数里边有参数www,所以被称为parameterized function,www就是parameter vector。
- 这样做的好处:
- 1)节省存储:www的维数远小于∣S∣|S|∣S∣
- 2)泛化能力:当一个state sss是visited,参数www是updated,这样某些其他unvisited states的values也可以被updated。按这种方式,the learned values可以泛化到unvisited states。
Algorithm for state value estimation
Objective function
首先,用一种更正式的方式:
- 令vπ(s)v_\pi(s)vπ(s)和v^(s,w)\hat{v}(s,w)v^(s,w)分别表示true state value和approximate函数.
- 我们的目标是找到一个最优的www,使得v^(s,w)\hat{v}(s,w)v^(s,w)对于每个sss达到最优的近似vπ(s)v_\pi(s)vπ(s)
- 这个问题就是一个policy evaluation问题,稍后我们将会把它推广到policy improvement。
- 为了找到最优的www,我们需要两步:
- 第一步定义一个目标函数(object function)
- 第二步是优化这个目标函数。
The objective function is:J(w)=E[(vπ(S)−v^(S,w))2]J(w)=\mathbb{E}[(v_\pi(S)-\hat{v}(S,w))^2]J(w)=E[(vπ(S)−v^(S,w))2]
- 我们的目标是找到最优的www,这样可以最小化J(w)J(w)J(w)
- The expectation is with respect to the random variable S∈SS\in \mathcal{S}S∈S。SSS的概率分布是什么?
- This is often confusing because we have not discussed the probability distribution of states so far
- There are several ways to define the probability distribution of SSS.
第一种方式是使用一个uniform distribution.
- 它对待每个states都是同等的重要性,通过将每个state的概率设置为1/∣S∣1/|\mathcal{S}|1/∣S∣
- 这种情况下,目标函数变为:J(w)=E[(vπ(S)−v^(S,w))2]=1∣S∣∑s∈S(vπ(s)−v^(s,w))2J(w)=\mathbb{E}[(v_\pi (S)-\hat{v}(S,w))^2]=\frac{1}{|\mathcal{S}|}\sum_{s\in \mathcal{S}}(v_\pi(s)-\hat{v}(s,w))^2J(w)=E[(vπ(S)−v^(S,w))2]=∣S∣1s∈S∑(vπ(s)−v^(s,w))2
- 虽然平均分布是非常直观的,但是有一个问题:这里假设所有状态都是平等的,但是实际上可能不是那么回事。例如,某些状态在一个策略下可能几乎不会访问到。因此这种方式没有考虑一个给定策略下Markov process的实际动态变化。
第二种方式是使用stationary distribution
- Stationary distribution is an important concept. 它描述了一个Markov process的long-run behavior。
- 令{dπ(s)}s∈S\{d_\pi(s)\}_{s\in \mathcal{S} }{dπ(s)}s∈S表示基于策略π\piπ的Markov process的stationary distribution。根据定义有,dπ(s)≥0d_\pi(s)\ge 0dπ(s)≥0且∑s∈Sdπ(s)=1\sum_{s\in \mathcal{S}}d_\pi(s)=1∑s∈Sdπ(s)=1
- 在这种情况下,目标函数被重写为:J(w)=E[(vπ(S)−v^(S,w))2]=∑s∈Sdπ(s)(vπ(s)−v^(s,w))2J(w)=\mathbb{E}[(v_\pi (S)-\hat{v}(S,w))^2]=\sum_{s\in \mathcal{S}}d_\pi (s)(v_\pi(s)-\hat{v}(s,w))^2J(w)=E[(vπ(S)−v^(S,w))2]=s∈S∑dπ(s)(vπ(s)−v^(s,w))2这里的dπ(s)d_\pi(s)dπ(s)就扮演了权重的意思,这个函数是一个weighted squared error。
- 由于更频繁地visited states,具有更高的dπ(s)d_\pi(s)dπ(s)值,它们在目标函数中的权重也比那些很少访问的states的权重高。
对于stationary distribution更多的介绍:
- Distribution:state的Distribution
- Stationary : Long-run behavior
- Summary: 智能体agent根据一个策略运行一个较长时间之后,the probability that the agent is at any state can be described by this distribution.
需要强调的是:
- Stationary distribution 也被称为steady-state distribution,或者limiting distribution
- 它在理解value functional approximation method方面是非常重要的
- 对于policy gradient method也是非常重要的。
举个例子:如图所示,给定一个探索性的策略。让agent从一个状态出发然后跑很多次,根据这个策略,然后看一下会发生什么事情。
- 令nπ(s)n_\pi(s)nπ(s)表示次数,sss has been visited in a very long episode generated by π\piπ。
- 然后,dπ(s)d_\pi(s)dπ(s)可以由下式估计:dπ(s)≈nπ(s)∑s′∈Snπ(s′)d_\pi(s)\approx \frac{n_\pi(s)}{\sum_{s'\in \mathcal{S}}n_\pi(s') }dπ(s)≈∑s′∈Snπ(s′)nπ(s)
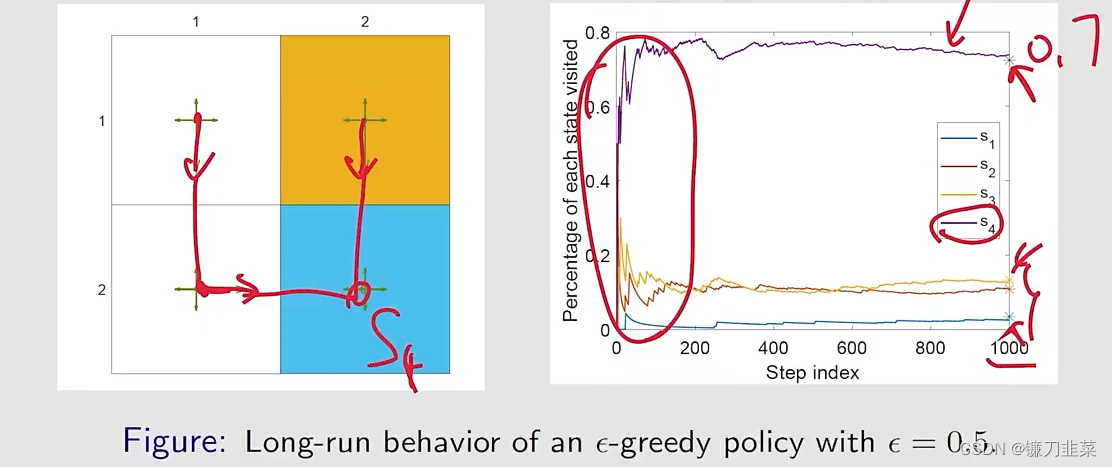
The converged values can be predicted because they are the entries of dπd_\pidπ:dπT=dπTPπd_\pi^T=d_\pi^TP_\pidπT=dπTPπ
对于上面的例子,有PπP_\piPπ:Pπ=[0.30.10.600.10.300.60.100.30.600.10.10.8]P_\pi=\begin{bmatrix}0.3 & 0.1 & 0.6 & 0\\0.1 & 0.3 & 0 & 0.6\\0.1 & 0 & 0.3 & 0.6\\0 & 0.1 & 0.1 & 0.8\end{bmatrix}Pπ=0.30.10.100.10.300.10.600.30.100.60.60.8可以计算出来它左边对应于eigenvalue等于1的那个eigenvector:dπ=[0.0345,0.1084,0.1330,0.7241]Td_\pi=[0.0345, 0.1084, 0.1330, 0.7241]^Tdπ=[0.0345,0.1084,0.1330,0.7241]T
Optimization algorithms
当我们有了目标函数,下一步就是优化它。为了最小化目标函数J(w)J(w)J(w),我们可以使用gradient-descent算法:wk+1=wk−αk∇wJ(wk)w_{k+1}=w_k-\alpha_k\nabla_w J(w_k)wk+1=wk−αk∇wJ(wk)它的true gradient是:
这个true gradient需要计算一个expectation。我们可以使用stochastic gradient替代the true gradient:wt+1=wt+αt(vπ(st)−v^(st,wt))∇wv^(st,wt)w_{t+1}=w_t+\alpha_t (v_\pi(s_t)-\hat{v}(s_t,w_t))\nabla_w \hat{v}(s_t, w_t)wt+1=wt+αt(vπ(st)−v^(st,wt))∇wv^(st,wt)其中sts_tst是S\mathcal{S}S的一个采样。这里2αk2\alpha_k2αk合并到了αk\alpha_kαk。
- 这个算法在实际当中是不能使用的,因为它需要true state value vπv_\pivπ,这是未知的。
- 可以使用vπ(st)v_\pi(s_t)vπ(st)的一个估计来替代它,这样该算法就可以实现了
那么如何进行代替呢?有两种方法:
- 第一种,Monte Carlo learning with function approximation
令gtg_tgt表示在episode中从sts_tst开始的discounted return,然后使用gtg_tgt近似vπ(st)v_\pi(s_t)vπ(st)。该算法变为wt+1=wt+αt(gt−v^(st,wt))∇wv^(st,wt)w_{t+1}=w_t+\alpha_t (g_t-\hat{v}(s_t,w_t))\nabla_w \hat{v}(s_t, w_t)wt+1=wt+αt(gt−v^(st,wt))∇wv^(st,wt) - 第二种,TD learning with function approximate
By the spirit of TD learning, rt+1+γv^(st+1,wt)r_{t+1}+\gamma \hat{v}(s_{t+1}, w_t)rt+1+γv^(st+1,wt)可以视为vπ(st)v_\pi(s_t)vπ(st)的一个近似。因此,算法变为:wt+1=wt+αt[rt+1+γv^(st+1,wt)]∇wv^(st,wt)w_{t+1}=w_t+\alpha_t[r_{t+1}+\gamma \hat{v}(s_{t+1}, w_t)]\nabla_w \hat{v}(s_t, w_t)wt+1=wt+αt[rt+1+γv^(st+1,wt)]∇wv^(st,wt)
TD learning with function approximation的伪代码:
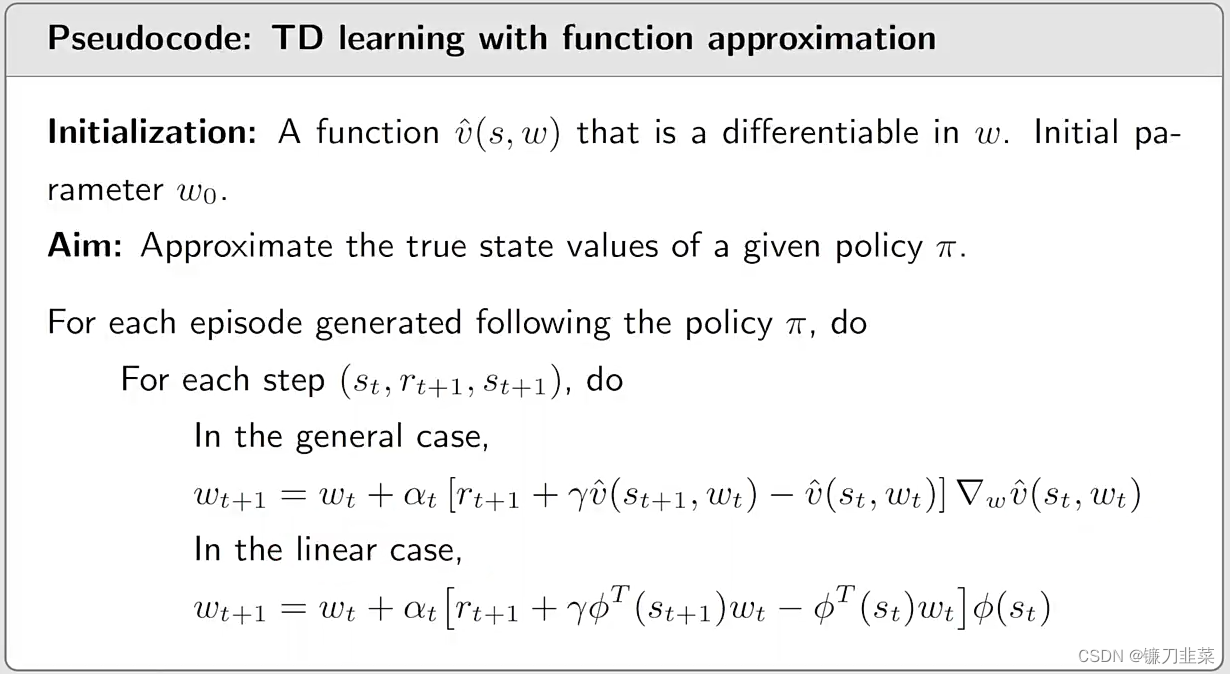
该方法仅能估计在给定policy情况下的state values,但是对于后面的算法的理解是非常重要的。
Selection of function approximators
如何选取函数v^(s,w)\hat{v}(s,w)v^(s,w)?
- 第一种方法,也是之前被广泛使用的,就是linear functionv^(s,w)=ϕT(s)w\hat{v}(s,w)=\phi^T(s)wv^(s,w)=ϕT(s)w这里的ϕ(s)\phi(s)ϕ(s)是一个feature vector, 可以是polynomial basis,Fourier basis,…。
- 第二种方法是,现在广泛使用的,就是用一个神经网络作为一个非线性函数近似器。神经网络的输入是state,输出是v^(s,w)\hat{v}(s,w)v^(s,w),网络参数是www。
在线性的情况中v^(s,w)=ϕT(s)w\hat{v}(s,w)=\phi^T(s)wv^(s,w)=ϕT(s)w,我们有∇wv^(st,wt)=ϕ(s)\nabla_w \hat{v}(s_t, w_t)=\phi(s)∇wv^(st,wt)=ϕ(s)将这个带入到TD算法wt+1=wt+αt[rt+1+γv^(st+1,wt)−v^(st,wt)]∇wv^(st,wt)w_{t+1}=w_t+\alpha_t[r_{t+1}+\gamma \hat{v}(s_{t+1}, w_t)-\hat{v}(s_t,w_t)]\nabla_w \hat{v}(s_t, w_t)wt+1=wt+αt[rt+1+γv^(st+1,wt)−v^(st,wt)]∇wv^(st,wt)就变成了wt+1=wt+αt[rt+1+γϕT(st+1)wt−ϕT(st)wt]ϕ(st)w_{t+1}=w_t+\alpha_t[r_{t+1}+\gamma \phi^T(s_{t+1})w_t-\phi^T(s_t)w_t]\phi(s_t)wt+1=wt+αt[rt+1+γϕT(st+1)wt−ϕT(st)wt]ϕ(st)这个具有线性函数近似的TD learning算法称为TD-Linear。
线性函数近似的劣势是:
- 难以去选择合适的feature vector.
线性函数近似的优势是: - TD算法在线性情况下的理论上的性质很容易理解和分析,与非线性情况相比
- 线性函数近似仍然在某些情况下使用:tabular representation是linear function approximation的一种少见的特殊情况。
那么为什么tabular representation是linear function approximation的一种少见的特殊情况?
- 首先,对于state sss,选择一个特殊的feature vectorϕ(s)=es∈R∣S∣\phi(s)=e_s\in \mathbb{R}^{|\mathcal{S}|}ϕ(s)=es∈R∣S∣其中ese_ses是一个vector,其中第sss个实体为1,其他为0.
- 在这种情况下v^(st,wt)=esTw=w(s)\hat{v}(s_t, w_t)=e_s^Tw=w(s)v^(st,wt)=esTw=w(s)其中w(s)w(s)w(s)是www的第s个实体。
回顾TD-Linear算法:wt+1=wt+αt[rt+1+γϕT(st+1)wt−ϕT(st)wt]ϕ(st)w_{t+1}=w_t+\alpha_t[r_{t+1}+\gamma \phi^T(s_{t+1})w_t-\phi^T(s_t)w_t]\phi(s_t)wt+1=wt+αt[rt+1+γϕT(st+1)wt−ϕT(st)wt]ϕ(st)
- 当ϕ(st)=es\phi(s_t)=e_sϕ(st)=es,上面的算法变成了wt+1=wt+αt[rt+1+γwt(st+1)−wt(st)]estw_{t+1}=w_t+\alpha_t[r_{t+1}+\gamma w_t(s_{t+1})-w_t(s_t)]e_{s_t}wt+1=wt+αt[rt+1+γwt(st+1)−wt(st)]est这是一个向量等式,仅仅更新wtw_twt的第sss个实体。
- 将上面式子两边乘以estTe_{s_t}^TestT,得到wt+1(st)=wt(st)+αt[rt+1+γwt(st+1)−wt(st)]w_{t+1}(s_t)=w_t(s_t)+\alpha_t[r_{t+1}+\gamma w_t(s_{t+1})-w_t(s_t)]wt+1(st)=wt(st)+αt[rt+1+γwt(st+1)−wt(st)]这就是基于表格形式的TD算法。
Illustrative examples
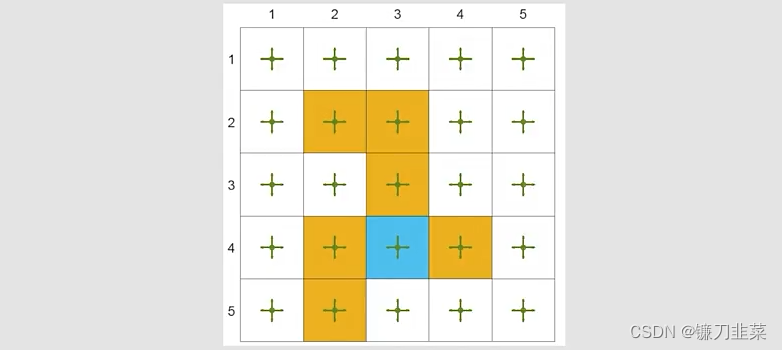
考虑一个5×5的网格世界示例:
- 给定一个策略:π(a∣s)=0.2\pi(a|s)=0.2π(a∣s)=0.2,对于任意的s,as,as,a
- 我们的目标是基于该策略,估计state values(策略评估问题)
- 总计有25种state values。
- 设置rforbidden=rboundary=−1,rtarget=1,γ=0.9r_{forbidden}=r_{boundary}=-1, r_{target}=1, \gamma=0.9rforbidden=rboundary=−1,rtarget=1,γ=0.9
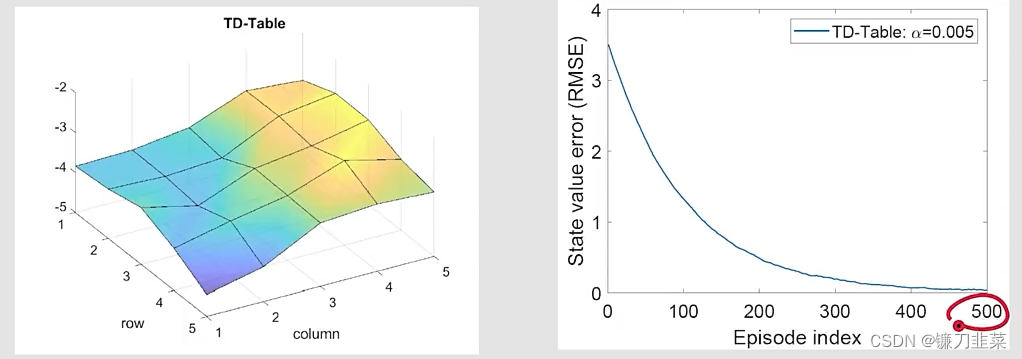
Ground truth:
- true state values和3D可视化

Experience samples:
- 500 episodes were generated following the given policy
- Each episode has 500 steps and starts from a randomly selected state-action pair following a uniform distribution。
为了对比,首先给出表格形式的TD算法(TD-Table)的结果:
那么看一下TD-Linear是否也能很好估计出来state value呢?
第一步就是要建立feature vector。要建立一个函数,这个函数也对应一个曲面,这个曲面能很好地拟合真实的state value对应的曲面。那么函数对应的曲面最简单的情况是什么呢?就是平面,所以这时候选择feature vector等于ϕ(s)=[1xy]∈R3\phi(s)=\begin{bmatrix}1 \\x \\y\end{bmatrix}\in \mathbb{R}^3ϕ(s)=1xy∈R3在这种情况下,近似的state value是v^(s,w)=ϕT(s)w=[1,x,y][w1w2w3]=w1+w2x+w3y\hat{v}(s,w)=\phi^T(s)w=[1, x, y]\begin{bmatrix}w_1 \\w_2 \\w_3\end{bmatrix} =w_1+w_2x+w_3yv^(s,w)=ϕT(s)w=[1,x,y]w1w2w3=w1+w2x+w3y注意,ϕ(s)\phi(s)ϕ(s)也可以定义为ϕ(s)=[x,y,1]T\phi(s)=[x, y, 1]^Tϕ(s)=[x,y,1]T,其中这里边的顺序是不重要的。
将刚才的feature vector带入TD-Linear算法中,得到:
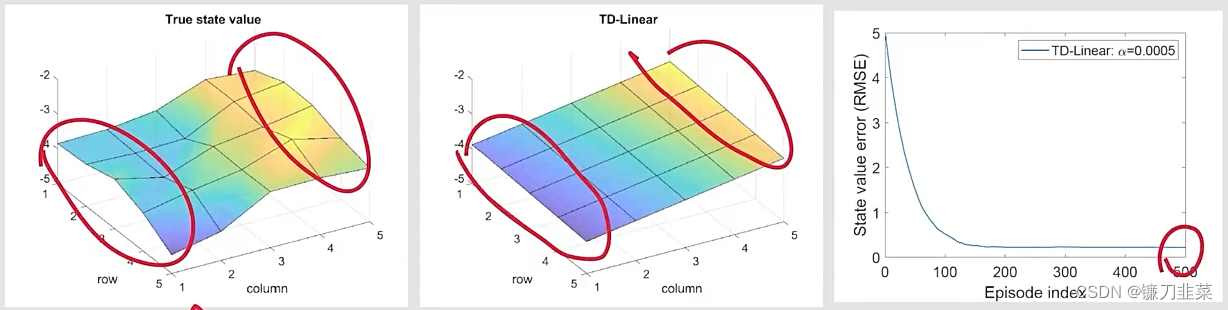
- 这里边的趋势是正确的,但是有一些错误,这是由于用平面拟合的本身方法的局限性。
- 我们尝试使用一个平面去近似一个非平面,这是非常困难的。
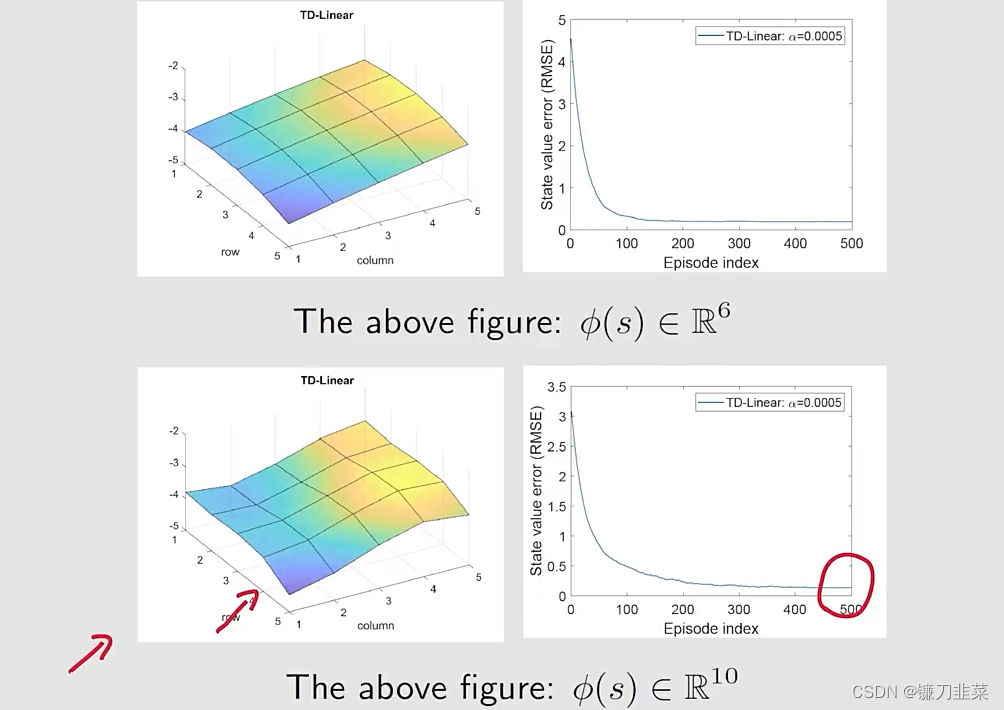
为了提高近似能力,可以使用high-order feature vectors,这样也就有更多的参数。
- 例如,我们考虑这样一个feature vector:ϕ(s)=[1,x,y,x2,y2,xy]T∈R6\phi(s)=[1, x, y, x^2, y^2, xy]^T\in \mathbb{R}^6ϕ(s)=[1,x,y,x2,y2,xy]T∈R6在这种情况下,有v^(s,w)=ϕT(s)w=w1+w2x+w3y+w4x2+w5y2+w6xy\hat{v}(s,w)=\phi^T(s)w=w_1+w_2x+w_3y+w_4x^2+w_5y^2+w_6xyv^(s,w)=ϕT(s)w=w1+w2x+w3y+w4x2+w5y2+w6xy这对应一个quadratic surface。
- 可以进一步增加feature vector的维度ϕ(s)=[1,x,y,x2,y2,xy,x3,y3,x2y,xy2]T∈R10\phi(s)=[1, x, y, x^2, y^2, xy, x^3, y^3, x^2y, xy^2]^T\in \mathbb{R}^10ϕ(s)=[1,x,y,x2,y2,xy,x3,y3,x2y,xy2]T∈R10
通过higher-order feature vectors的TD-Linear算法的结果:
Summary of the story
1)首先从一个objective function出发J(w)=E[(vπ(S)−v^(S,w))2]J(w)=\mathbb{E}[(v_\pi(S)-\hat{v}(S, w))^2]J(w)=E[(vπ(S)−v^(S,w))2]这个目标函数表明这是一个policy evaluation问题.
2)然后对这个objective function进行优化,优化方法使用gradient-descent algorithm:wt+1=wt+αt(vπ(st)−v^(st,wt))∇wv^(st,wt)w_{t+1}=w_t+\alpha_t (v_\pi(s_t)-\hat{v}(s_t,w_t))\nabla_w \hat{v}(s_t, w_t)wt+1=wt+αt(vπ(st)−v^(st,wt))∇wv^(st,wt)但是问题是里边有一个vπ(st)v_\pi(s_t)vπ(st)是不知道的。
3)第三,使用一个近似替代算法中的true value function vπ(st)v_\pi(s_t)vπ(st),得到下面算法:wt+1=wt+αt[rt+1+γv^(st+1,wt)−v^(st,wt)]∇wv^(st,wt)w_{t+1}=w_t+\alpha_t[r_{t+1}+\gamma \hat{v}(s_{t+1}, w_t)-\hat{v}(s_t,w_t)]\nabla_w \hat{v}(s_t, w_t)wt+1=wt+αt[rt+1+γv^(st+1,wt)−v^(st,wt)]∇wv^(st,wt)
尽管上面的思路对于理解基本思想是非常有帮助的,但是它在数学上是不严谨的,因为做了替换操作。
Theoretical analysis
一个基本的结论,这个算法wt+1=wt+αt[rt+1+γv^(st+1,wt)−v^(st,wt)]∇wv^(st,wt)w_{t+1}=w_t+\alpha_t[r_{t+1}+\gamma \hat{v}(s_{t+1}, w_t)-\hat{v}(s_t,w_t)]\nabla_w \hat{v}(s_t, w_t)wt+1=wt+αt[rt+1+γv^(st+1,wt)−v^(st,wt)]∇wv^(st,wt)不是去minimize下面的objective function:J(w)=E[(vπ(S)−v^(S,w))2]J(w)=\mathbb{E}[(v_\pi(S)-\hat{v}(S, w))^2]J(w)=E[(vπ(S)−v^(S,w))2]
实际上,有多种objective functions:
- Objective function 1:True value errorJ(w)=E[(vπ(S)−v^(S,w))2]=∣∣v^(w)−vπ∣∣D2J(w)=\mathbb{E}[(v_\pi(S)-\hat{v}(S, w))^2]=||\hat{v}(w)-v_\pi||_D^2J(w)=E[(vπ(S)−v^(S,w))2]=∣∣v^(w)−vπ∣∣D2
- Objective function 2:Bellman errorJBE(w)=∣∣v^(w)−(rπ+γPπv^(w))∣∣D2≐∣∣v^(w)−Tπ(v^(w))∣∣D2J_{BE}(w)=||\hat{v}(w)-(r_\pi+\gamma P_{\pi}\hat{v}(w))||_D^2\doteq ||\hat{v}(w)-T_\pi(\hat{v}(w))||_D^2JBE(w)=∣∣v^(w)−(rπ+γPπv^(w))∣∣D2≐∣∣v^(w)−Tπ(v^(w))∣∣D2其中Tπ(x)≐rπ+γPπxT_\pi(x)\doteq r_\pi+\gamma P_\pi xTπ(x)≐rπ+γPπx
- Objective function 2:Projected Bellman errorJPBE(w)=∣∣v^(w)−MTπ(v^(w))∣∣D2J_{PBE}(w)=||\hat{v}(w)-MT_\pi(\hat{v}(w))||_D^2JPBE(w)=∣∣v^(w)−MTπ(v^(w))∣∣D2其中MMM是一个projection matrix(投影矩阵)
简而言之,上面提到的TD-Linear算法在最小化projected Bellman error。
Sarsa with function appriximation
到目前为止,我们仅仅是考虑state value estimation的问题,也就是我们希望v^≈vπ\hat{v}\approx v_\piv^≈vπ。为了搜索最优策略,我们需要估计action values。
The Sarsa algorithm with value function approximation是:

这个上一节介绍的TD算法是一样的,只不过将v^\hat{v}v^换成了q^\hat{q}q^
为了寻找最优策略,我们将policy evaluation(上面算法做的事儿)和policy improvement结合。下面给出Sarsa with function approximation的伪代码:
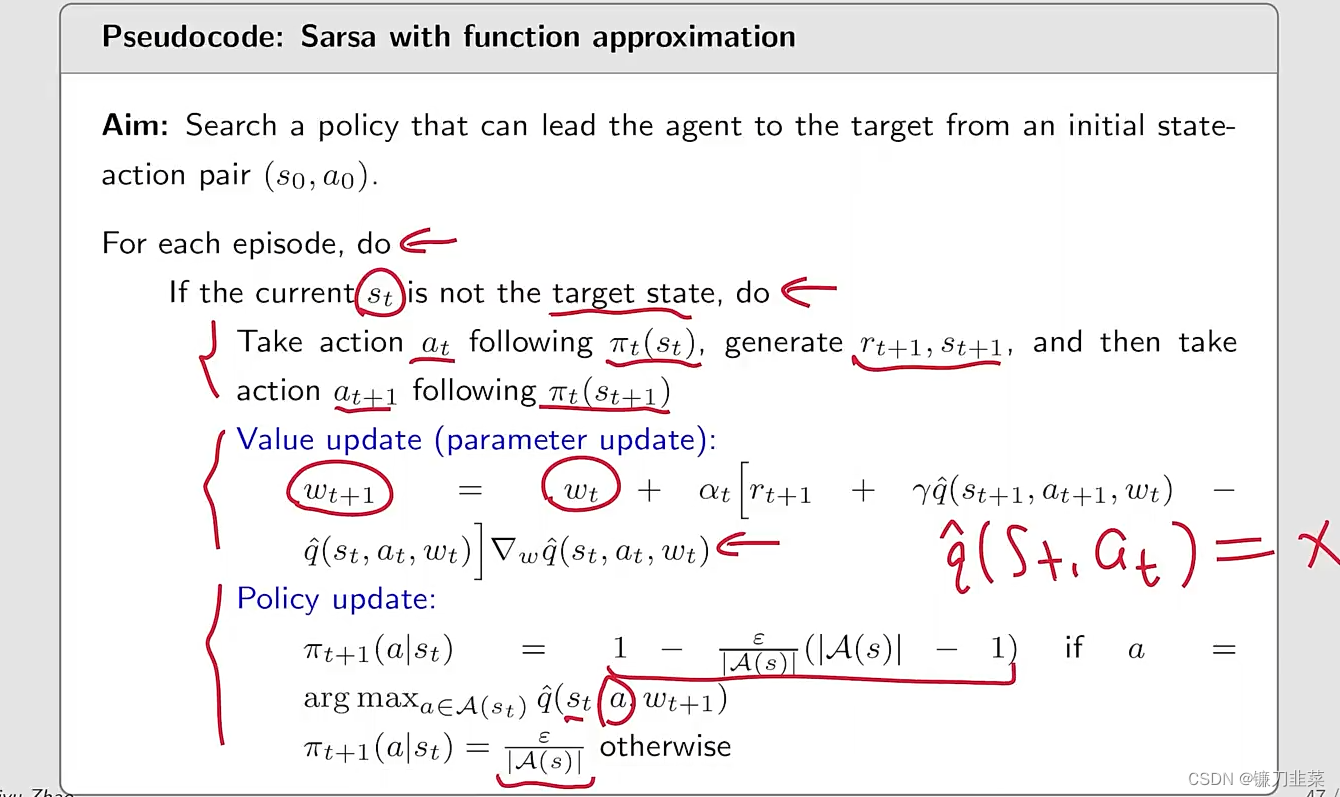
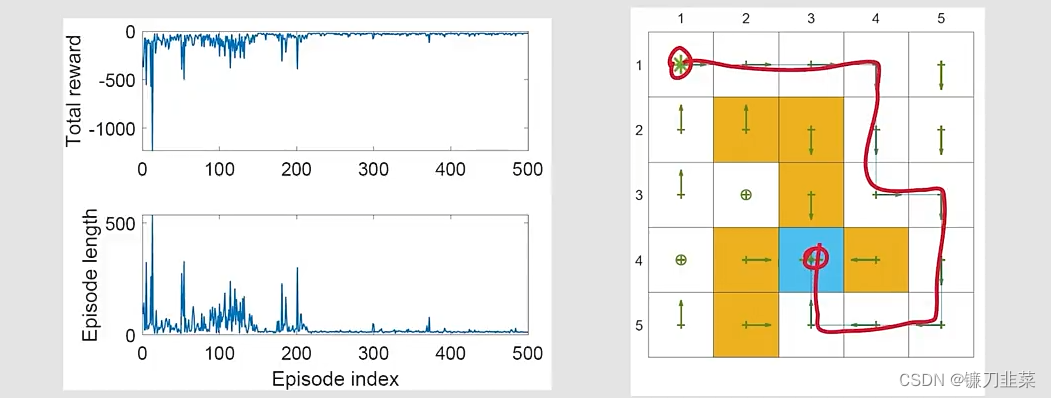
举个例子:
- Sarsa with linear function approximation。
- rforbidden=rboundary=−10,rtarget=1,γ=0.9,α=0.001,ϵ=0.1r_{forbidden}=r_{boundary}=-10, r_{target}=1, \gamma=0.9, \alpha=0.001, \epsilon=0.1rforbidden=rboundary=−10,rtarget=1,γ=0.9,α=0.001,ϵ=0.1
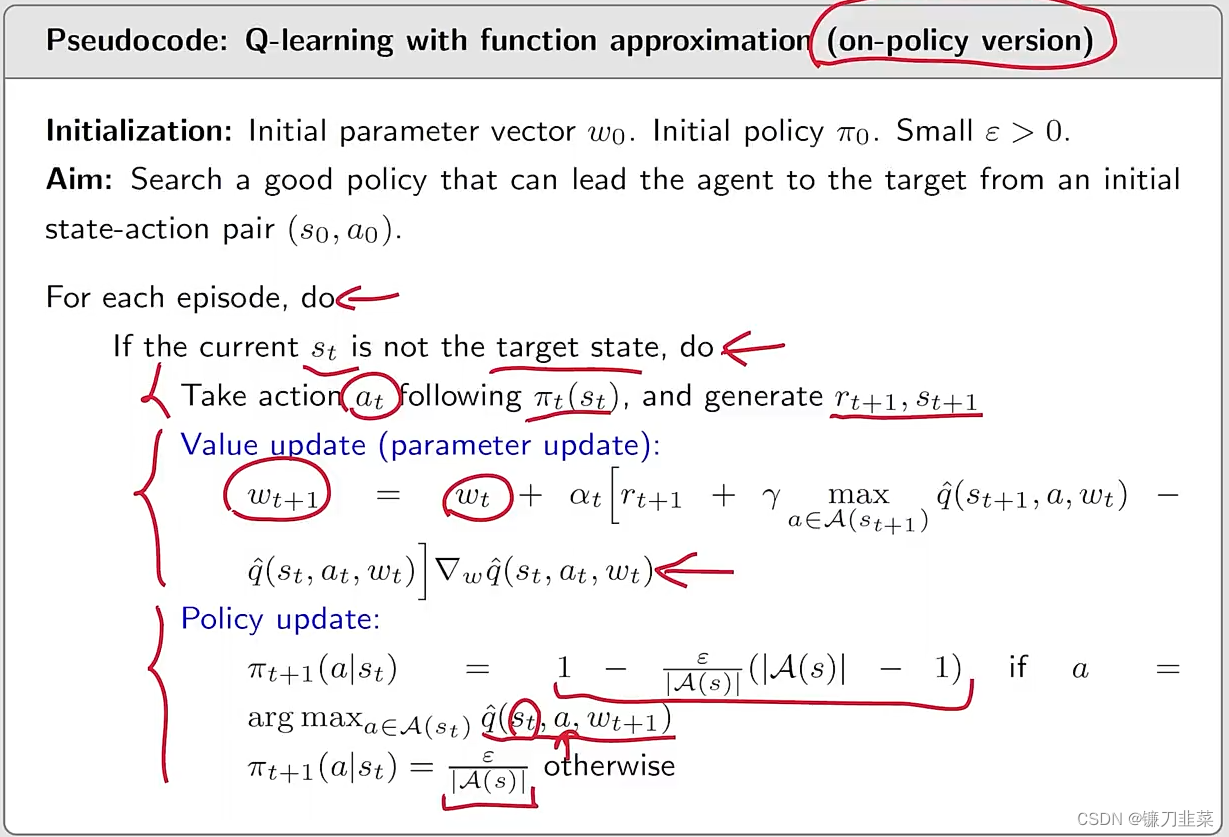
Q-learning with function approximation
类似地,tabular Q-learning也可以扩展到value function approximation的情况。
The q-value更新规则是:

这与上面的Sarsa算法相同,除了q^(st+1,at+1,wt)\hat{q}(s_{t+1}, a_{t+1}, w_t)q^(st+1,at+1,wt)被替换为maxa∈A(st+1)q^(st+1,a,wt)\max_{a\in \mathcal{A}(s_{t+1})}\hat{q}(s_{t+1}, a, w_t)maxa∈A(st+1)q^(st+1,a,wt)。
Q-learning with function approximation伪代码(on-policy version):
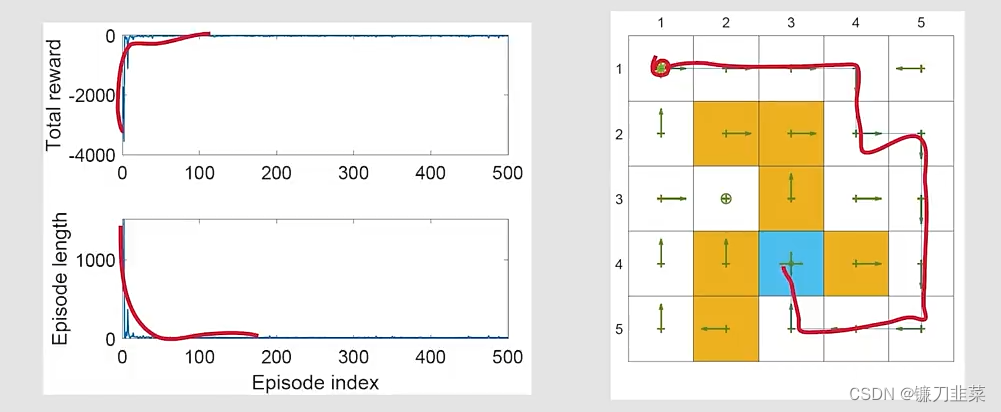
举个例子:
- Q-learning with linear function approximation
- rforbidden=rboundary=−10,rtarget=1,γ=0.9,α=0.001,ϵ=0.1r_{forbidden}=r_{boundary}=-10, r_{target}=1, \gamma=0.9, \alpha=0.001, \epsilon=0.1rforbidden=rboundary=−10,rtarget=1,γ=0.9,α=0.001,ϵ=0.1
Deep Q-learning
Deep Q-learning算法又被称为deep Q-network (DQN):
- 最早的一个和最成功的一个将深度神经网络算法引入到强化学习中
- 神经网络的角色是一个非线性函数approximator
- 与下面的算法不同,是由于训练一个网络的方式:
Deep Q-learning旨在最小化目标函数/损失函数:

其中(S,A,R,S′)(S,A,R,S')(S,A,R,S′)是随机变量。
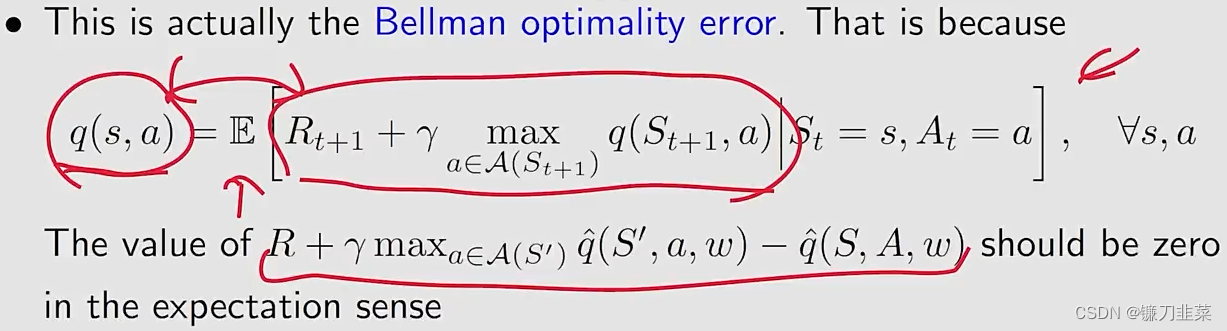
那么如何最小化目标函数呢?使用Gradient-descent!但是如何计算目标函数的梯度还是有一些tricky。这是因为在目标函数中有两个位置有www:

也就是说参数w不仅仅只出现在q^(S,A,w)\hat{q}(S,A,w)q^(S,A,w)中,还出现在它的前面。这里用yyy表示:y≐R+γmaxa∈A(S′)q^(S′,a,w)y\doteq R+\gamma \max_{a\in \mathcal{A}(S')} \hat{q}(S',a,w)y≐R+γa∈A(S′)maxq^(S′,a,w)
为了简单起见,我们可以假设www在yyy中是固定的(至少一定时间内),当我们计算梯度的时候。为了这样做,我们引入两个network。
- 一个是main network,用以表示q^(s,a,w)\hat{q}(s,a,w)q^(s,a,w)
- 另一个是target network q^(s,a,wT)\hat{q}(s,a,w_T)q^(s,a,wT)
用这两个network吧上面目标函数中的两个q^\hat{q}q^区分开来,就得到了如下式子:

其中wTw_TwT是target network parameter。
当wTw_TwT是固定的,可以计算出来JJJ的梯度如下:

- 这就是Deep Q-learning的基本思想,使用gradient-descent算法最小化目标函数。
- 然而,这样的优化过程涉及许多重要的技巧。
第一个技巧:使用了两个网络,一个是main network,另一个是target network。
为什么要使用两个网络呢?在数学上来说因为计算梯度的时候会非常的复杂,所以先去固定一个,然后再去计算另一个,这样就需要两个网络来实现。
具体实现的细节:
- 令www和wTw_TwT分别表示mean network和target network的参数,它们初始化的时候是一样的。
- 在每个iteration中,从
replay buffer中draw一个mini-batch样本{(s,a,r,s′)}\{(s,a,r,s')\}{(s,a,r,s′)} - 网络的输入包括state sss和action aaa,目标输出是yT≐r+γmaxa∈A(s′)q^(s′,a,wT)y_T\doteq r+\gamma \max_{a\in \mathcal{A}(s')} \hat{q}(s',a,w_T)yT≐r+γmaxa∈A(s′)q^(s′,a,wT)。然后我们直接基于the mini-batch {(s,a,r,s′)}\{(s,a,r,s')\}{(s,a,r,s′)}最小化TD error或者称为loss function (yT−q^(s,a,w))2(y_T-\hat{q}(s,a,w))^2(yT−q^(s,a,w))2。这样一段时间后,参数w发生变化,再将其赋给wTw_TwT,再用来训练www。
另一个技巧:Experience replay(经验回放)
问题:什么是Experience replay?
回答:
- 我们收集一些experience samples之后,we do NOT use these samples in the order they were collected。
- Instead,我们将它们存储在一个set中,称为replay buffer B≐{(s,a,r,s′)}\mathcal{B}\doteq \{(s, a, r, s')\}B≐{(s,a,r,s′)}
- 每次我们训练neural network,我们可以从replay buffer中draw a mini-batch的random samples
- 取出的samples,称为experience replay,应当按照一个均匀分布的方式,即每个experience被replay的机会是相等的。
问题:为什么在deep Q-learning中要用experience replay?为什么replay必须要按照一个uniform distribution的方式?
回答:这个回答依赖于下面的objective function

- (S,A)∼d(S,A)\sim d(S,A)∼d:(S,A)(S,A)(S,A)是一个索引,并将其视为一个single random variable。
- R∼p(R∣S,A),S′∼p(S′∣S,A)R\sim p(R|S,A), S'\sim p(S'|S,A)R∼p(R∣S,A),S′∼p(S′∣S,A):RRR和SSS由system model确定
- state-action pair (S,A)(S,A)(S,A)的分布假定是uniform.
- 然而,样本采集不是按照均匀分布来的,因为它们是由某个policies按顺序生成的。
- 为了打破顺序采样样本的关联,我们才从replay buffer中按照uniformly方式drawing samples,也就是experience replay technique
- 这是在数学上为什么experience replay是必须的,以及为什么experience replay必须是uniform的原因。
回顾tabular的情况:
- 问题1:为什么tabular Q-learning没有要求experience replay?
- 回答:没有uniform distribution的需要
- 问题2:为什么Deep Q-learning 涉及distribution?
- 回答:因为在deep Q-learning的情况下,目标函数是一个在所有(S,A)(S,A)(S,A)之上的scale average。tabular case没有涉及SSS或者AAA的任何distribution。在tabular情况下算法旨在求解对于所有的(s,a)(s,a)(s,a)的一组方程(Bellman optimality equation)。
- 问题3:可以在tabular Q-learning中使用experience replay吗?
- 回答:可以,而且还会让sample更加高效,因为同一个sample可以用多次。
再次给出Deep Q-learning的伪代码(off-policy version):
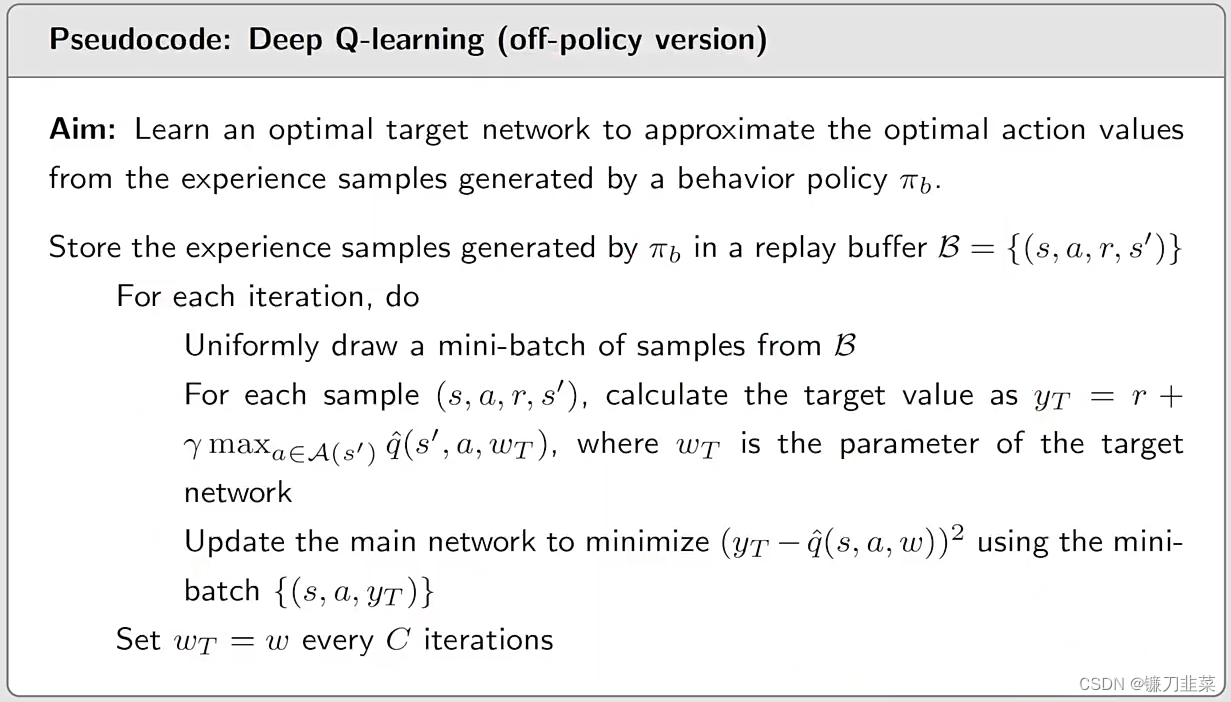
需要澄清的几个问题:
- 为什么没有策略更新?因为这里是off-policy
- 为什么没有使用之前导出的梯度去更新策略?因为之前导出梯度的算法比较底层,它可以指导我们去生成现在的算法,但是要遵循神经网络批量训练的黑盒特性,然后更好地高效地训练神经网络
- 这里网络的input和output与DQN原文中的不一样。原文中是on-policy的,这里是off-policy的。
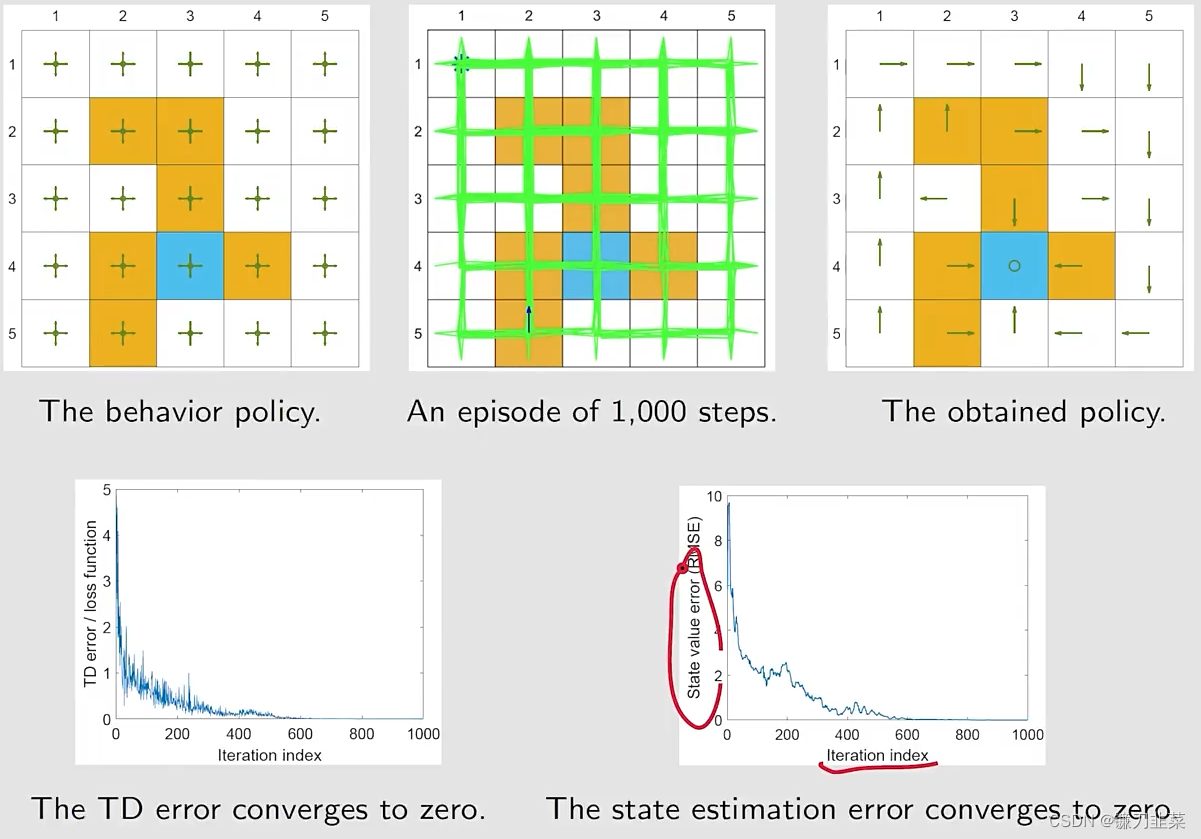
举个例子:目标是learn optimal action values for every state-action pair。一旦得到最优策略,最优greedy策略可以立即得到。
问题设置:
仿真结果:
如果我们仅仅使用100步的一个single episode将会发生什么?也就是数据不充分的情况
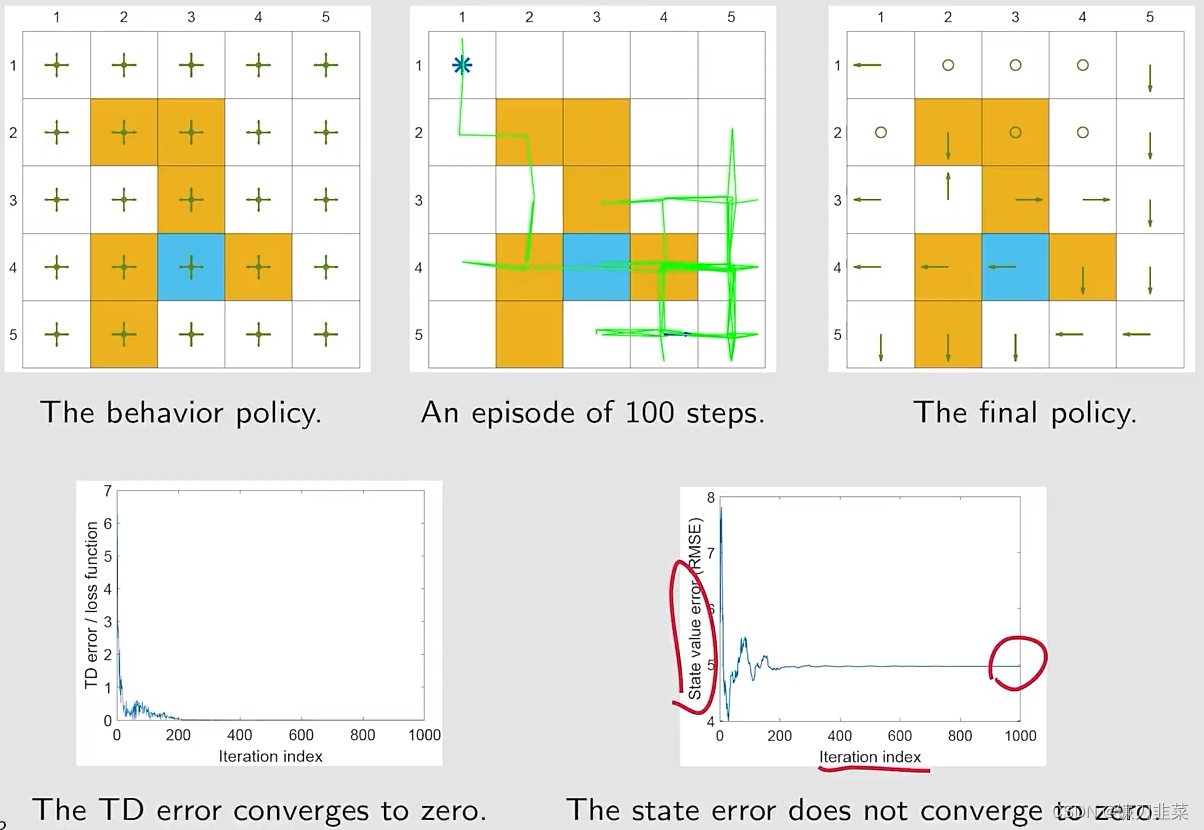
可以看出,好的算法是需要充分的数据才能体现效果的。
内容来源
- 《强化学习的数学原理》 西湖大学工学院赵世钰教授 主讲
- 《动手学强化学习》 俞勇 著
相关文章:
【强化学习】强化学习数学基础:值函数近似
值函数近似Value Function ApproximationMotivating examples: curve fittingAlgorithm for state value estimationObjective functionOptimization algorithmsSelection of function approximatorsIllustrative examplesSummary of the storyTheoretical analysisSarsa with …...
JVM系列——Java与线程,介绍线程原理和操作系统的关系
并发不一定要依赖多线程(如PHP中很常见的多进程并发)。 但是在Java里面谈论并发,基本上都与线程脱不开关系。因此我们讲一下从Java线程在虚拟机中的实现。 线程的实现 线程是比进程更轻量级的调度执行单位。 线程的引入,可以把一个进程的资源分配和执行调…...

C++打开文件夹对话框之BROWSEINFO
头文件 #include <shlobj.h> #include <windows.h> #include <stdio.h> using namespace std; 案例 string chooseFile(void) {//用户选择的路径,可以是TCHAR szBuffer[MAX_PATH] {0};然后再使用TCHAR 转char字符串,此处可以直接使…...

Nuxt项目配置、目录结构说明-实战教程基础-Day02
Nuxt项目配置、目录结构说明-实战教程基础-Day02一、Nuxt项目结构1.1资源目录1.2 组件目录1.3 布局目录1.4 中间件目录1.5 页面目录1.6 插件目录1.7 静态文件目录1.8 Store 目录1.9 nuxt.config.js 文件1.10 package.json 文件其他:别名二、项目配置2.1 build2.2 cs…...
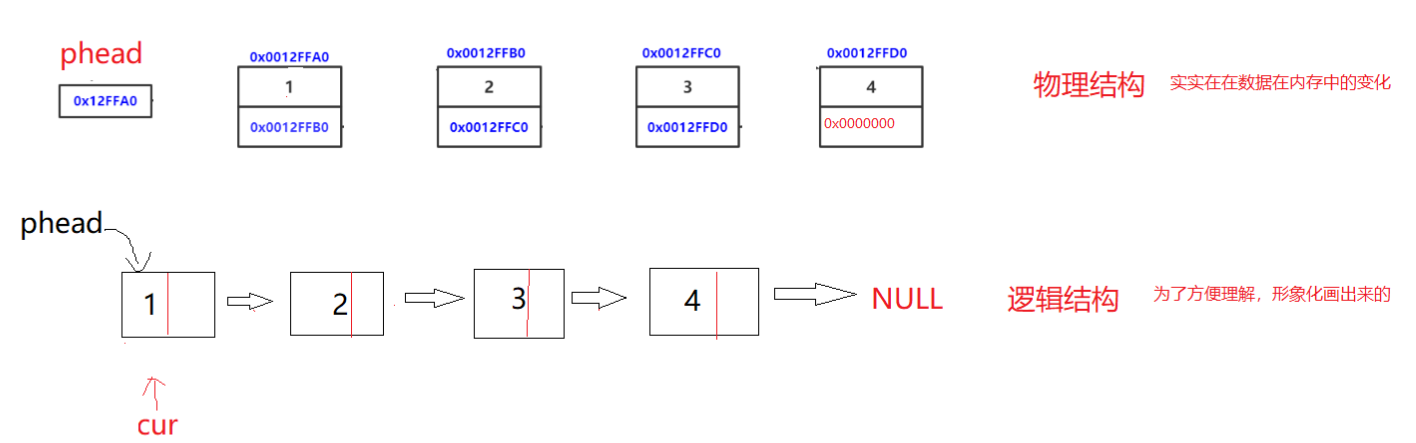
单链表的头插,尾插,头删,尾删等操作
前言顺序表要求是具有连续的物理空间,并且数据的话是在这些空间当中是连续的存储。但这样会带来很多问题,比如说在头部或者说中间插入的话,效率不是很高;并且申请空间可能需要扩容,并且越往后一般来说都是异地扩容&…...

Qt扫盲-QProcess理论总结
QProcess理论使用总结一、概述二、使用三、通过 Channel 通道通信四、同步进程API五、注意事项1. 平台特性2. 不能实时读取一、概述 QProcess 其实更多的是与外面进程进行交互的一个工具类,通过这个类来启动外部进程,获取这个进程的标准输出,…...

JAVA进阶 —— Steam流
目录 一、 引言 二、 Stream流概述 三、Stream流的使用步骤 1. 获取Stream流 1.1 单列集合 1.2 双列集合 1.3 数组 1.4 零散数据 2. Stream流的中间方法 3. Stream流的终结方法 四、 练习 1. 数据过滤 2. 数据操作 - 按年龄筛选 3. 数据操作 - 演员信息要求…...

Ubuntu Protobuf 安装(测试有效)
安装流程 下载软件 下载自己要安装的版本:https://github.com/protocolbuffers/protobuf 下载源码编译: 系统环境:Ubuntu16(其它版本亦可),Protobuf-3.6.1 编译源码 cd protobuf# 当使用 git clone 下来的…...
驱动程序开发:FTP服务器和OpenSSH的移植与搭建、以及一些笔记
目录一、FTP服务器移植与搭建1、在ubuntu下安装vsftpd2、在window下安装FileZilla3、移植vsftpd到开发板上4、Filezilla 连接测试5、注意点二、开发板 OpenSSH 移植与使用1、移植 zlib 库2、移植 openssl 库3、移植 openssh 库4、openssh 使用测试三、关于u-boot上的操作及根文…...
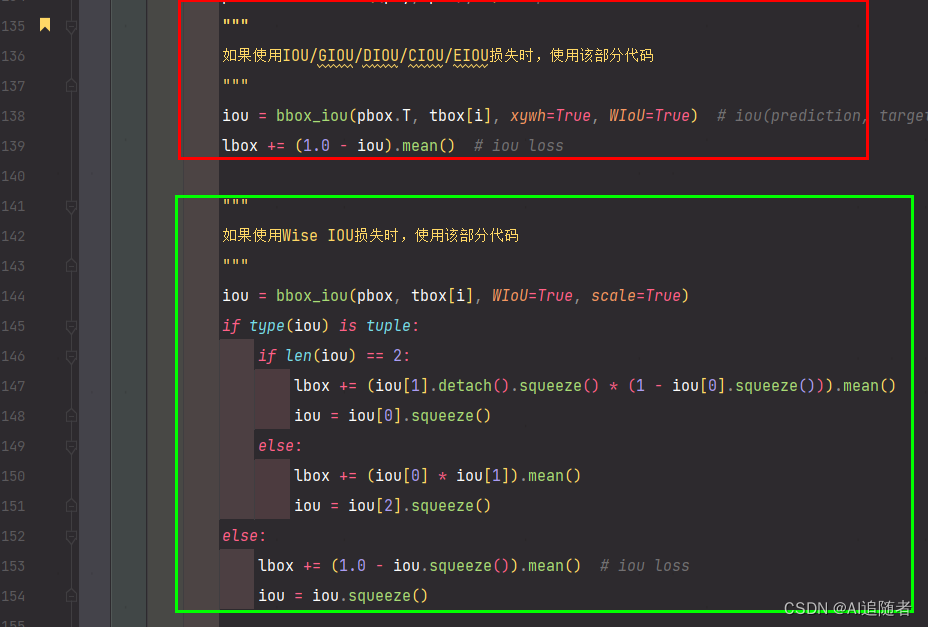
优化改进YOLOv5算法之添加GIoU、DIoU、CIoU、EIoU、Wise-IoU模块(超详细)
目录 1、IoU 1.1 什么是IOU 1.2 IOU代码 2、GIOU 2.1 为什么提出GIOU 2.2 GIoU代码 3 DIoU 3.1 为什么提出DIOU 3.2 DIOU代码 4 CIOU 4.1 为什么提出CIOU 4.2 CIOU代码 5 EIOU 5.1 为什么提出EIOU 5.2 EIOU代码 6 Wise-IoU 7 YOLOv5中添加GIoU、DIoU、CIoU、…...
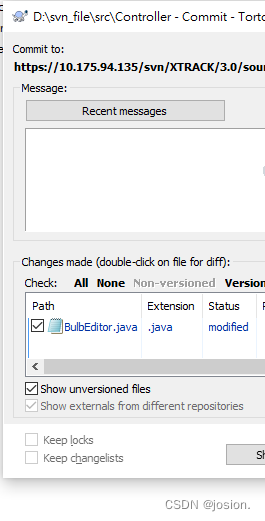
windows电脑pc如何使用svn获取文档和代码
一、安装svn 下载链接 也可通过其他方式下载 二、使用 2.1 随便找一个文件夹 2.2 点击右键,选择SVN Checkout 2.3输入网址 如当你在网页上访问时地址为https://10.197.78.78/!/#aaa/view/head/bbb 在这里不能直接填入,而是 https://10.197.78.78/sv…...

ROS1学习笔记:tf坐标系广播与监听的编程实现(ubuntu20.04)
参考B站古月居ROS入门21讲:tf坐标系广播与监听的编程实现 基于VMware Ubuntu 20.04 Noetic版本的环境 文章目录一、创建功能包二、创建代码2.1 以C为例2.1.1 配置代码编译规则2.1.2 编译整个工作空间2.1.2 配置环境变量2.1.4 执行代码2.2 以Python为例2.2.1 配置代码…...

力扣解法汇总1590. 使数组和能被 P 整除
目录链接: 力扣编程题-解法汇总_分享记录-CSDN博客 GitHub同步刷题项目: https://github.com/September26/java-algorithms 原题链接:力扣 描述: 给你一个正整数数组 nums,请你移除 最短 子数组(可以为 …...
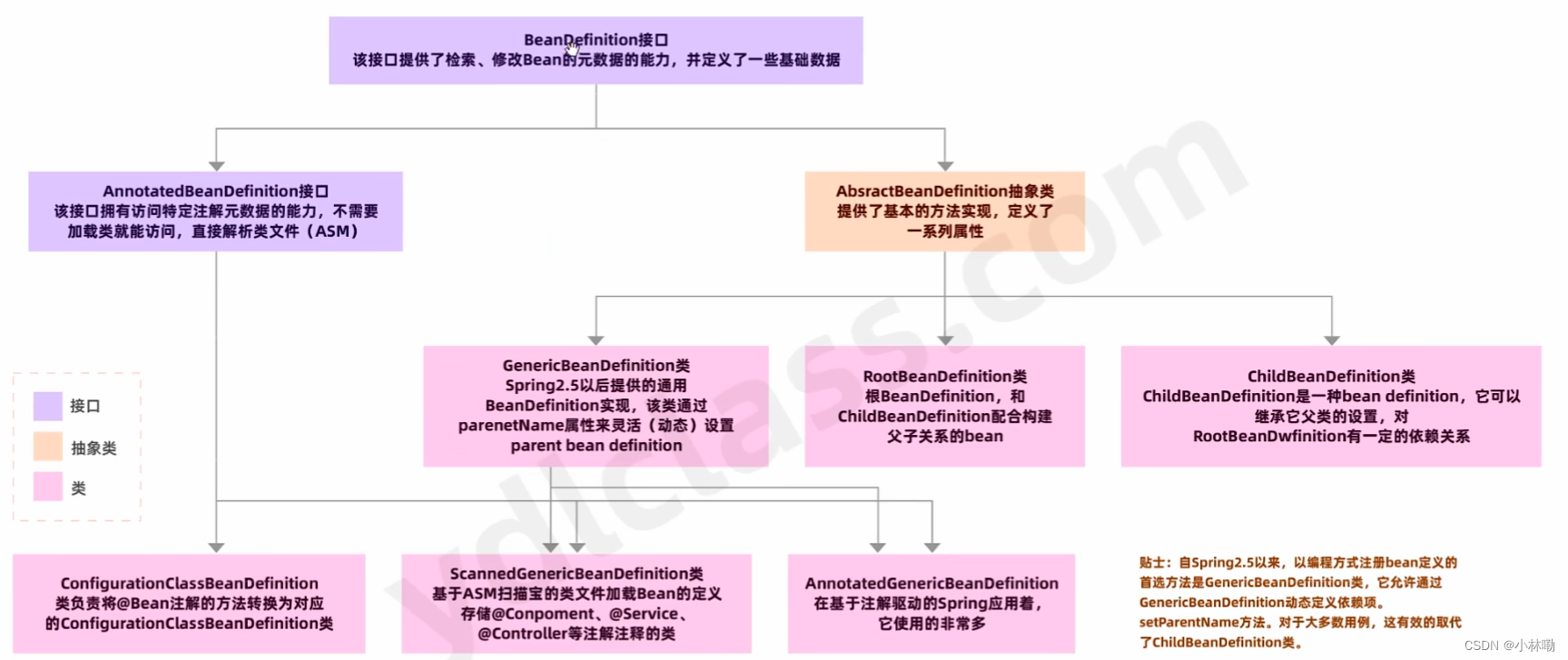
Spring源码阅读(基础)
第一章:bean的元数据 1.bean的注入方式: 1.1 xml文件 1.2 注解 Component(自己写的类才能在上面加这些注解) 1.3配置类: Configuration 注入第三方数据源之类 1.4 import注解 (引用了Myselector类下…...

服务搭建篇(九) 使用GitLab+Jenkins搭建CI\CD执行环境 (上) 基础环境搭建
1.前言 每当我们程序员开发在本地完成开发之后 , 都要部署到正式环境去使用 , 在一些传统的运维体系中 , 开发与运维都是割裂的 , 开发人员不允许操作正式服务器 , 服务器只能通过运维团队来操作 , 这样可以极大的提高服务器的安全性 , 不经过安全保护的开放服务器 , 对于黑客…...

CDC 长沙站丨云原生技术研讨会:数字兴链,云化未来!
一、活动信息:活动主题:CDC 长沙站丨云原生技术研讨会活动时间:2023 年 3 月 14 日下午 14:30-17:30活动地点:长沙市岳麓区-拓维信息总部 1 楼多功能厅活动参与方式:免门票参与,戳此…...
)
A.特定领域知识图谱知识推理方案:知识图谱推理算法综述[二](DTransE/PairRE:基于表示学习的知识图谱链接预测算法)
推荐参考文章: A.特定领域知识图谱知识推理方案:知识图谱推理算法综述[一](基于距离的翻译模型:TransE、TransH、TransR、TransH、TransA、RotatE) A.特定领域知识图谱知识推理方案:知识图谱推理算法综述[二](DTransE/PairRE:基于表示学习的知识图谱链接预测算法) A.…...
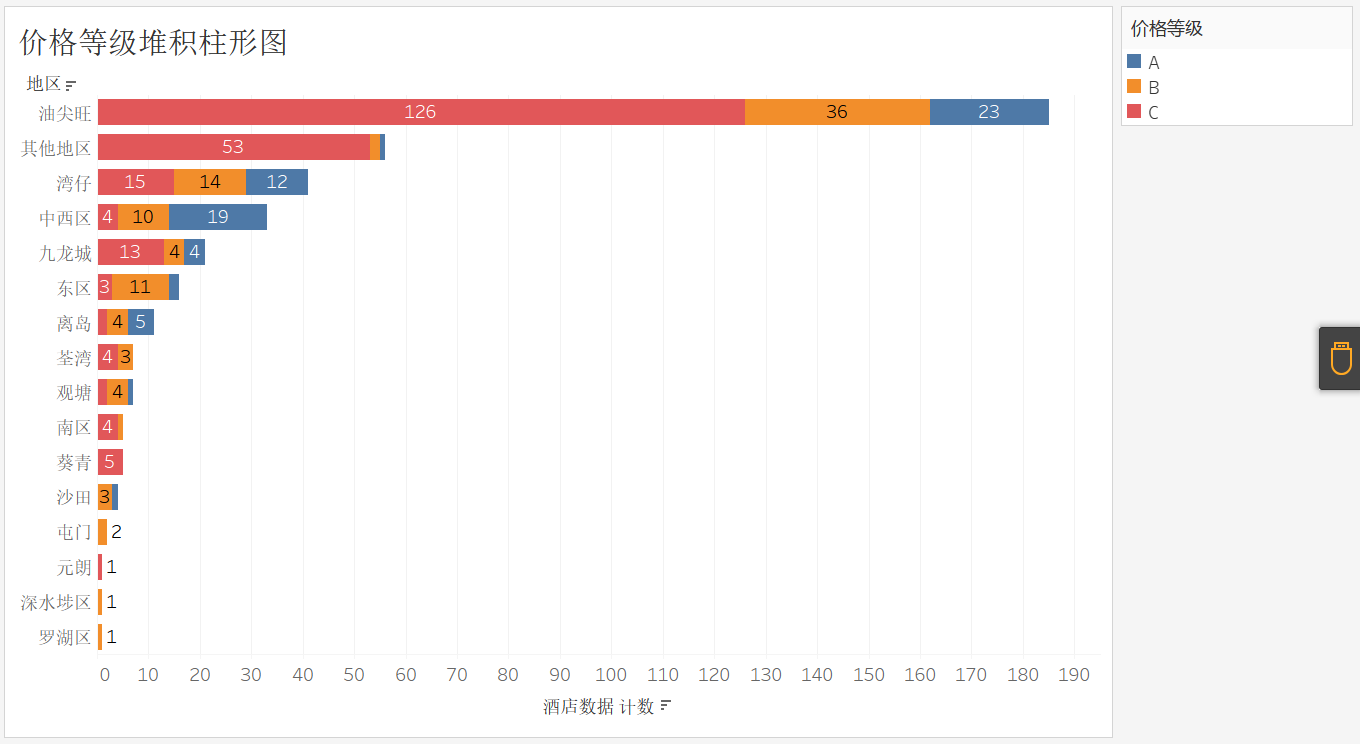
香港酒店模拟分析项目报告--使用tableau、python、matlab
转载请标记本文出处 软件:tableau、pycharm、关系型数据库:MySQL 数据大量分析考虑电脑性能的情况。 文章目录前言一、爬虫是什么?二、使用tableau数据可视化1.引入数据1.1 制作直方图-各地区酒店数量条形图1.2 各地区酒店均价1.3 价格等级堆…...

第18天-商城业务(商品检索服务,基于Elastic Search完成商品检索)
1.构建商品检索页面 1.1.引入依赖 <!-- thymeleaf模板引擎 --><dependency><groupId>org.springframework.boot</groupId><artifactId>spring-boot-starter-thymeleaf</artifactId></dependency><!-- 热更新 --><…...
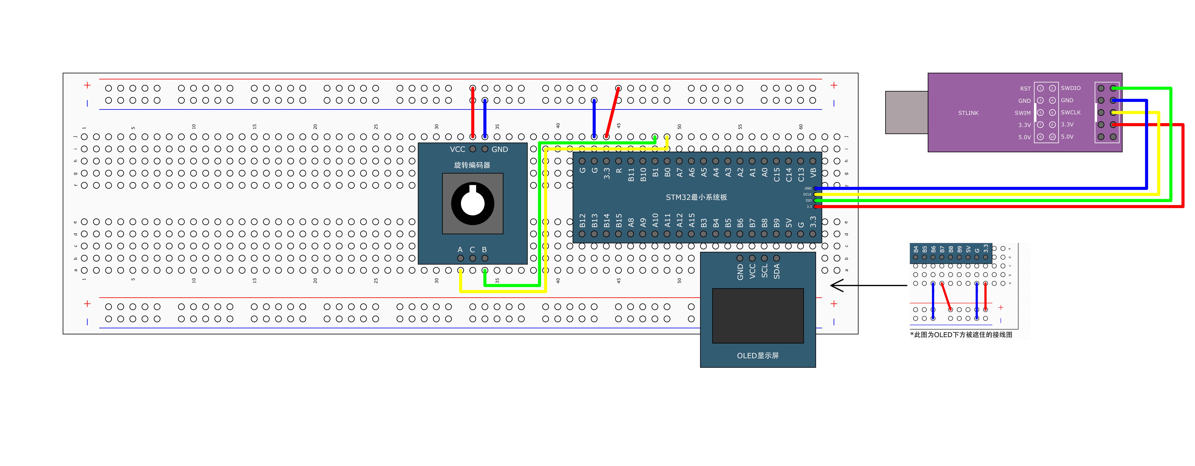
5.2 对射式红外传感器旋转编码器计次
对射式红外传感器1.1 接线图VCC GND分别接电源的正负极DO数字输出端,随意选择一个GPIO口1.2 硬件原理当挡光片或者编码盘在对射式红外传感器中间经过时,DO就会输出电平变化信号,电平跳变信号触发STM32 PB14号口中断,在中断函数中执…...

【Axure高保真原型】引导弹窗
今天和大家中分享引导弹窗的原型模板,载入页面后,会显示引导弹窗,适用于引导用户使用页面,点击完成后,会显示下一个引导弹窗,直至最后一个引导弹窗完成后进入首页。具体效果可以点击下方视频观看或打开下方…...

[2025CVPR]DeepVideo-R1:基于难度感知回归GRPO的视频强化微调框架详解
突破视频大语言模型推理瓶颈,在多个视频基准上实现SOTA性能 一、核心问题与创新亮点 1.1 GRPO在视频任务中的两大挑战 安全措施依赖问题 GRPO使用min和clip函数限制策略更新幅度,导致: 梯度抑制:当新旧策略差异过大时梯度消失收敛困难:策略无法充分优化# 传统GRPO的梯…...

【OSG学习笔记】Day 18: 碰撞检测与物理交互
物理引擎(Physics Engine) 物理引擎 是一种通过计算机模拟物理规律(如力学、碰撞、重力、流体动力学等)的软件工具或库。 它的核心目标是在虚拟环境中逼真地模拟物体的运动和交互,广泛应用于 游戏开发、动画制作、虚…...
)
IGP(Interior Gateway Protocol,内部网关协议)
IGP(Interior Gateway Protocol,内部网关协议) 是一种用于在一个自治系统(AS)内部传递路由信息的路由协议,主要用于在一个组织或机构的内部网络中决定数据包的最佳路径。与用于自治系统之间通信的 EGP&…...

线程与协程
1. 线程与协程 1.1. “函数调用级别”的切换、上下文切换 1. 函数调用级别的切换 “函数调用级别的切换”是指:像函数调用/返回一样轻量地完成任务切换。 举例说明: 当你在程序中写一个函数调用: funcA() 然后 funcA 执行完后返回&…...

Auto-Coder使用GPT-4o完成:在用TabPFN这个模型构建一个预测未来3天涨跌的分类任务
通过akshare库,获取股票数据,并生成TabPFN这个模型 可以识别、处理的格式,写一个完整的预处理示例,并构建一个预测未来 3 天股价涨跌的分类任务 用TabPFN这个模型构建一个预测未来 3 天股价涨跌的分类任务,进行预测并输…...
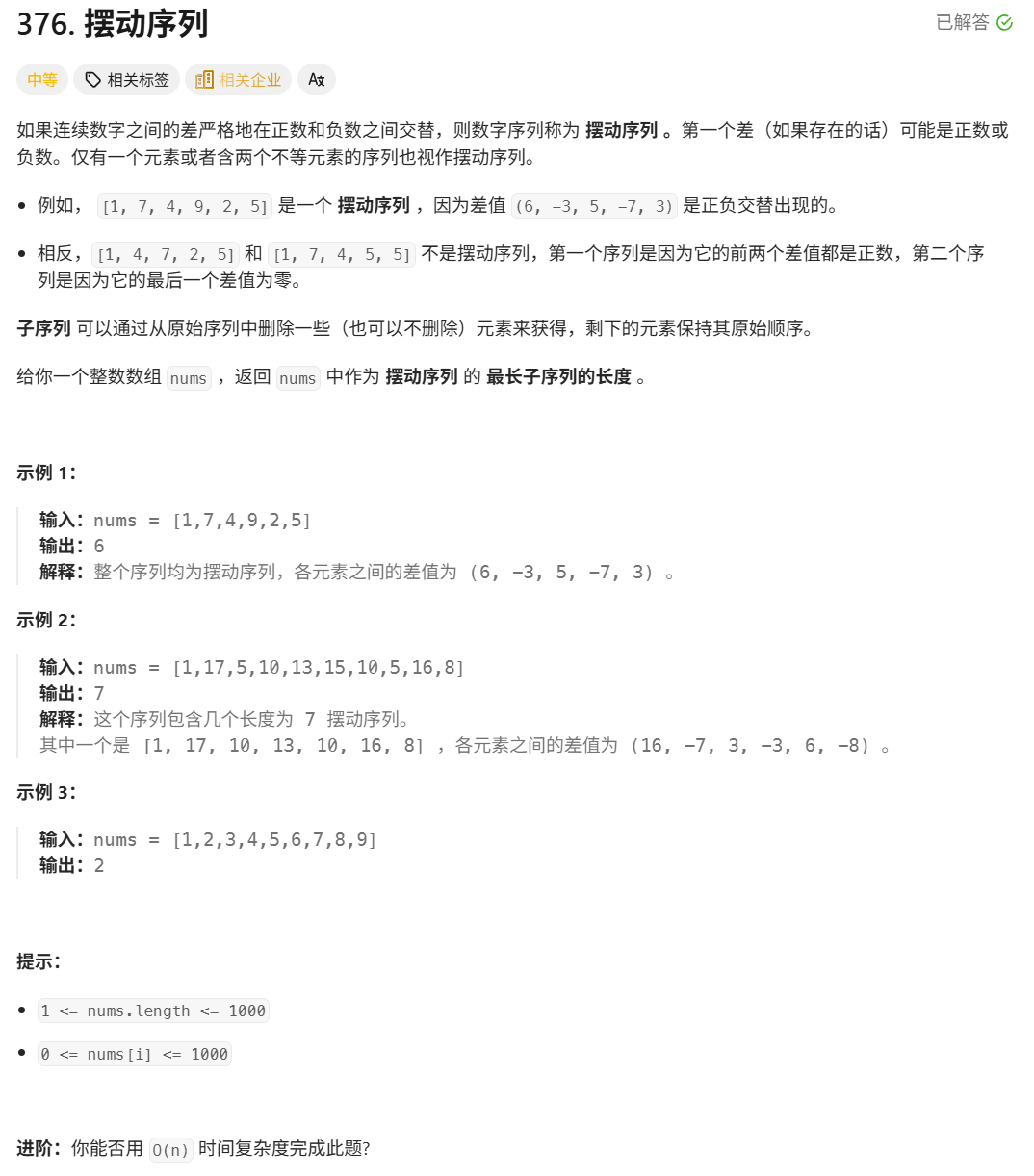
376. Wiggle Subsequence
376. Wiggle Subsequence 代码 class Solution { public:int wiggleMaxLength(vector<int>& nums) {int n nums.size();int res 1;int prediff 0;int curdiff 0;for(int i 0;i < n-1;i){curdiff nums[i1] - nums[i];if( (prediff > 0 && curdif…...

leetcodeSQL解题:3564. 季节性销售分析
leetcodeSQL解题:3564. 季节性销售分析 题目: 表:sales ---------------------- | Column Name | Type | ---------------------- | sale_id | int | | product_id | int | | sale_date | date | | quantity | int | | price | decimal | -…...

网络编程(UDP编程)
思维导图 UDP基础编程(单播) 1.流程图 服务器:短信的接收方 创建套接字 (socket)-----------------------------------------》有手机指定网络信息-----------------------------------------------》有号码绑定套接字 (bind)--------------…...
:邮件营销与用户参与度的关键指标优化指南)
精益数据分析(97/126):邮件营销与用户参与度的关键指标优化指南
精益数据分析(97/126):邮件营销与用户参与度的关键指标优化指南 在数字化营销时代,邮件列表效度、用户参与度和网站性能等指标往往决定着创业公司的增长成败。今天,我们将深入解析邮件打开率、网站可用性、页面参与时…...