ROS机器人小车建模仿真与SLAM
文章目录
- 一、URDF
- 二、创建小车模型
- 1.创建功能包
- 2.导入依赖
- 3.创建urdf,launch文件:
- 4.可视化
- 三、添加雷达
- 1.xacro文件
- 2.集成和修改launch
- 3.添加摄像头和雷达
- 三.GAZEBO仿真
- 四、orbslam2+kitti
- 1.下载
- 2.安装编译ORB_SLAM2
- 3.运行Kitee数据集
一、URDF
URDF,即统一机器人描述格式(Unified Robot Description Format),是一种用于描述机器人模型的XML文件格式。URDF文件包含了机器人的物理和关节属性,使得机器人可以在仿真环境中被准确地表示和模拟。URDF是ROS(机器人操作系统)中广泛使用的一种格式,但它也可以独立于ROS使用。
URDF文件的主要组成部分包括:
- 机器人(Robot):定义了机器人的根元素,包含了机器人的所有链接(links)和关节(joints)。
- 链接(Link):代表机器人的一个物理部分,可以是机器人的手臂、腿部或任何其他部分。每个链接都有其几何形状、质量、尺寸和视觉/碰撞属性。
- 关节(Joint):定义了链接之间的连接方式,可以是旋转关节(revolute)、滑动关节(prismatic)或其他类型。关节定义了链接之间的相对运动。
- 材料(Material):定义了链接的视觉属性,如颜色、纹理等。
- 传感器(Sensor):可以附加到链接上,用于在仿真中模拟传感器的功能。
- 插件(Plugin):允许URDF文件包含自定义的脚本或行为。
URDF文件使得开发者能够在不同的仿真环境中重用机器人模型,同时也方便了机器人设计和仿真的交流。URDF文件可以被转换成其他格式,以适应不同的仿真软件或机器人控制系统。
二、创建小车模型
1.创建功能包
mkdir -p catkin_ws/src
cd catkin_ws/src
catkin_init_workspace
2.导入依赖
catkin_create_pkg jubot_demo urdf xacro
cd jubot_demo/
mkdir urdf
mkdir launch
mkdir meshes
mkdir config
3.创建urdf,launch文件:
<launch><!-- 将 urdf 文件内容设置进参数服务器 --><param name="robot_description" textfile="$(find jubot_demo)/urdf/box_urdf.urdf" /><!-- 启动 rviz --><!-- <node pkg="rviz" type="rviz" name="rviz" /> --><node pkg="rviz" type="rviz" name="rviz" args="-d $(find jubot_demo)/config/rviz/show_four_wheel_car.rviz" /><!-- 启动机器人状态和关节状态发布节点 --><node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" /><node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" /><!-- 启动图形化的控制关节运动节点 --><node pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" name="joint_state_publisher_gui" /></launch>
urdf:
<!-- <robot name="mycar"><link name="base_link"><visual><geometry><box size="0.5 0.2 0.1" /></geometry></visual></link>
</robot> --><robot name="mycar"><!-- 设置 base_footprint --><link name="base_footprint"><visual><geometry><sphere radius="0.001" /></geometry></visual></link><!-- 添加底盘 --><!-- 参数形状:圆柱 半径:10 cm 高度:8 cm 离地:1.5 cm--><link name="base_link"><visual><geometry><cylinder radius="0.1" length="0.08" /></geometry><origin xyz="0 0 0" rpy="0 0 0" /><material name="yellow"><color rgba="0.8 0.3 0.1 0.5" /></material></visual></link><joint name="base_link2base_footprint" type="fixed"><parent link="base_footprint" /><child link="base_link"/><origin xyz="0 0 0.055" /></joint><!-- 添加驱动轮 --><!-- 添加驱动轮 --><!--驱动轮是侧翻的圆柱参数半径: 3.25 cm宽度: 1.5 cm颜色: 黑色关节设置:x = 0y = 底盘的半径 + 轮胎宽度 / 2z = 离地间距 + 底盘长度 / 2 - 轮胎半径 = 1.5 + 4 - 3.25 = 2.25(cm)axis = 0 1 0--><link name="left_wheel"><visual><geometry><cylinder radius="0.0325" length="0.015" /></geometry><origin xyz="0 0 0" rpy="1.5705 0 0" /><material name="black"><color rgba="0.0 0.0 0.0 1.0" /></material></visual></link><joint name="left_wheel2base_link" type="continuous"><parent link="base_link" /><child link="left_wheel" /><origin xyz="0 0.1 -0.0225" /><axis xyz="0 1 0" /></joint><link name="right_wheel"><visual><geometry><cylinder radius="0.0325" length="0.015" /></geometry><origin xyz="0 0 0" rpy="1.5705 0 0" /><material name="black"><color rgba="0.0 0.0 0.0 1.0" /></material></visual></link><joint name="right_wheel2base_link" type="continuous"><parent link="base_link" /><child link="right_wheel" /><origin xyz="0 -0.1 -0.0225" /><axis xyz="0 1 0" /></joint><!-- 添加万向轮(支撑轮) --><!-- 添加万向轮(支撑轮) --><!--参数形状: 球体半径: 0.75 cm颜色: 黑色关节设置:x = 自定义(底盘半径 - 万向轮半径) = 0.1 - 0.0075 = 0.0925(cm)y = 0z = 底盘长度 / 2 + 离地间距 / 2 = 0.08 / 2 + 0.015 / 2 = 0.0475 axis= 1 1 1--><link name="front_wheel"><visual><geometry><sphere radius="0.0075" /></geometry><origin xyz="0 0 0" rpy="0 0 0" /><material name="black"><color rgba="0.0 0.0 0.0 1.0" /></material></visual></link><joint name="front_wheel2base_link" type="continuous"><parent link="base_link" /><child link="front_wheel" /><origin xyz="0.0925 0 -0.0475" /><axis xyz="1 1 1" /></joint><link name="back_wheel"><visual><geometry><sphere radius="0.0075" /></geometry><origin xyz="0 0 0" rpy="0 0 0" /><material name="black"><color rgba="0.0 0.0 0.0 1.0" /></material></visual></link><joint name="back_wheel2base_link" type="continuous"><parent link="base_link" /><child link="back_wheel" /><origin xyz="-0.0925 0 -0.0475" /><axis xyz="1 1 1" /></joint>
</robot>
4.可视化
先编译配置launch文件,退到主目录catkin_ws下,执行catkin_make。
成功之后,再执行 catkin_make install。
然后在主目录catkin_make下配置环境变量source devel/setup.bash。
检测环境变量是否配置成功echo $ROS_PACKAGE_PATH。
再启动launch文件,完成可视化的建立:
创建启动文件:
cd ~/catkin_ws/src/mbot_description/launch
sudo gedit display_mbot_base_urdf.launch
在打开的文件中写入
<launch><!-- 加载的参数名字叫robot_description,具体内容是urdf相关模型的路径 --><param name="robot_description" textfile="$(find mbot_description)/urdf/mbot_base.urdf" /><!-- 设置GUI参数,显示关节控制插件 --><param name="use_gui" value="true"/><!-- 运行joint_state_publisher节点,发布机器人的关节状态 --><node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" /><!-- 运行robot_state_publisher节点,发布tf --><node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" /><!-- 运行rviz可视化界面,保存每次打开之后的相关插件,保存到config文件夹下面 --><node name="rviz" pkg="rviz" type="rviz" args="-d $(find mbot_description)/config/mbot_urdf.rviz" required="true" />
</launch>建立可视化
roslaunch jubot_demo box_launch.launch
得到模型:
三、添加雷达
1.xacro文件
在urdf文件夹下建一个xacro文件夹,在终端打开。
在文件夹中新建my_base.urdf.xacro文件,编写xacro文件:
vim my_base.urdf.xacro
在打开的文件中写入
<robot name="my_base" xmlns:xacro="http://www.ros.org/wiki/xacro"><xacro:property name="PI" value="3.141"/><material name="black"><color rgba="0.0 0.0 0.0 1.0" /></material><xacro:property name="base_footprint_radius" value="0.001" /> <xacro:property name="base_link_radius" value="0.1" /> <xacro:property name="base_link_length" value="0.08" /> <xacro:property name="earth_space" value="0.015" /> <link name="base_footprint"><visual><geometry><sphere radius="${base_footprint_radius}" /></geometry></visual></link><link name="base_link"><visual><geometry><cylinder radius="${base_link_radius}" length="${base_link_length}" /></geometry><origin xyz="0 0 0" rpy="0 0 0" /><material name="yellow"><color rgba="0.5 0.3 0.0 0.5" /></material></visual></link><joint name="base_link2base_footprint" type="fixed"><parent link="base_footprint" /><child link="base_link" /><origin xyz="0 0 ${earth_space + base_link_length / 2 }" /></joint><xacro:property name="wheel_radius" value="0.0325" /><xacro:property name="wheel_length" value="0.015" /><xacro:macro name="add_wheels" params="name flag"><link name="${name}_wheel"><visual><geometry><cylinder radius="${wheel_radius}" length="${wheel_length}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="${PI / 2} 0.0 0.0" /><material name="black" /></visual></link><joint name="${name}_wheel2base_link" type="continuous"><parent link="base_link" /><child link="${name}_wheel" /><origin xyz="0 ${flag * base_link_radius} ${-(earth_space + base_link_length / 2 - wheel_radius) }" /><axis xyz="0 1 0" /></joint></xacro:macro><xacro:add_wheels name="left" flag="1" /><xacro:add_wheels name="right" flag="-1" /><xacro:property name="support_wheel_radius" value="0.0075" /> <!-- 支撑轮半径 --><xacro:macro name="add_support_wheel" params="name flag" ><link name="${name}_wheel"><visual><geometry><sphere radius="${support_wheel_radius}" /></geometry><origin xyz="0 0 0" rpy="0 0 0" /><material name="black" /></visual></link><joint name="${name}_wheel2base_link" type="continuous"><parent link="base_link" /><child link="${name}_wheel" /><origin xyz="${flag * (base_link_radius - support_wheel_radius)} 0 ${-(base_link_length / 2 + earth_space / 2)}" /><axis xyz="1 1 1" /></joint></xacro:macro><xacro:add_support_wheel name="front" flag="1" /><xacro:add_support_wheel name="back" flag="-1" /></robot>
2.集成和修改launch
加载robot_description时使用command属性,属性值就是调用 xacro 功能包的 xacro 程序直接解析 xacro 文件,然后启动launch文件
box_launch
<launch><!-- <param name="robot_description" textfile="$(find jubot_demo)/urdf/box_urdf.urdf" /> --><param name="robot_description" command="$(find xacro)/xacro $(find jubot_demo)/urdf/xacro/my_base.urdf.xacro" /><!-- <node pkg="rviz" type="rviz" name="rviz" /> --><node pkg="rviz" type="rviz" name="rviz" args="-d $(find jubot_demo)/config/rviz/show_four_wheel_car.rviz" /><node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" /><node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" /><node pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" name="joint_state_publisher_gui" /></launch>
将launch修改为
<launch><!-- <param name="robot_description" command="$(find xacro)/xacro $(find jubot_demo)/urdf/xacro/my_base.urdf.xacro" /> --><param name="robot_description" command="$(find xacro)/xacro $(find jubot_demo)/urdf/xacro/my_car_camera.urdf.xacro" /><node pkg="rviz" type="rviz" name="rviz" args="-d $(find jubot_demo)/config/rviz/show_four_wheel_car.rviz" /><node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" /><node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" /><node pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" name="joint_state_publisher_gui" /></launch>
3.添加摄像头和雷达
在xacro文件夹中新建my_camera.urdf.xacro
<robot name="my_camera" xmlns:xacro="http://wiki.ros.org/xacro"><!-- 摄像头属性 --><xacro:property name="camera_length" value="0.01" /> <!-- 摄像头长度(x) --><xacro:property name="camera_width" value="0.025" /> <!-- 摄像头宽度(y) --><xacro:property name="camera_height" value="0.025" /> <!-- 摄像头高度(z) --><xacro:property name="camera_x" value="0.08" /> <!-- 摄像头安装的x坐标 --><xacro:property name="camera_y" value="0.0" /> <!-- 摄像头安装的y坐标 --><xacro:property name="camera_z" value="${base_link_length / 2 + camera_height / 2}" /> <link name="camera"><visual><geometry><box size="${camera_length} ${camera_width} ${camera_height}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /><material name="black" /></visual></link><joint name="camera2base_link" type="fixed"><parent link="base_link" /><child link="camera" /><origin xyz="${camera_x} ${camera_y} ${camera_z}" /></joint>
</robot>my_car_camera.urdf.xacro
<!-- 组合小车底盘与摄像头与雷达 -->
<robot name="my_car_camera" xmlns:xacro="http://wiki.ros.org/xacro"><xacro:include filename="my_base.urdf.xacro" /><xacro:include filename="my_camera.urdf.xacro" /><xacro:include filename="my_laser.urdf.xacro" />
</robot>
my_laser.urdf.xacro文件
<robot name="my_camera" xmlns:xacro="http://wiki.ros.org/xacro"><xacro:property name="camera_length" value="0.01" /> <xacro:property name="camera_width" value="0.025" /> <xacro:property name="camera_height" value="0.025" /> <xacro:property name="camera_x" value="0.08" /> <xacro:property name="camera_y" value="0.0" /> <xacro:property name="camera_z" value="${base_link_length / 2 + camera_height / 2}" /> <link name="camera"><visual><geometry><box size="${camera_length} ${camera_width} ${camera_height}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /><material name="black" /></visual></link><joint name="camera2base_link" type="fixed"><parent link="base_link" /><child link="camera" /><origin xyz="${camera_x} ${camera_y} ${camera_z}" /></joint>
</robot>
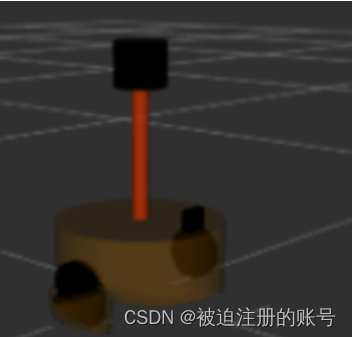
三.GAZEBO仿真
修改碰撞属性和惯性矩阵,导入到gazebo中。
my_base.urdf.xacro:
<robot name="base" xmlns:xacro="http://wiki.ros.org/xacro"><xacro:macro name="sphere_inertial_matrix" params="m r"><inertial><mass value="${m}" /><inertia ixx="${2*m*r*r/5}" ixy="0" ixz="0"iyy="${2*m*r*r/5}" iyz="0" izz="${2*m*r*r/5}" /></inertial></xacro:macro><xacro:macro name="cylinder_inertial_matrix" params="m r h"><inertial><mass value="${m}" /><inertia ixx="${m*(3*r*r+h*h)/12}" ixy = "0" ixz = "0"iyy="${m*(3*r*r+h*h)/12}" iyz = "0"izz="${m*r*r/2}" /> </inertial></xacro:macro><xacro:macro name="Box_inertial_matrix" params="m l w h"><inertial><mass value="${m}" /><inertia ixx="${m*(h*h + l*l)/12}" ixy = "0" ixz = "0"iyy="${m*(w*w + l*l)/12}" iyz= "0"izz="${m*(w*w + h*h)/12}" /></inertial></xacro:macro>
</robot>
my_camera.urdf.xacro:
<robot name="my_camera" xmlns:xacro="http://wiki.ros.org/xacro"><xacro:property name="camera_length" value="0.01" /> <xacro:property name="camera_width" value="0.025" /> <xacro:property name="camera_height" value="0.025" /> <xacro:property name="camera_x" value="0.08" /> <xacro:property name="camera_y" value="0.0" /> <xacro:property name="camera_z" value="${base_link_length / 2 + camera_height / 2}" /> <xacro:property name="camera_m" value="0.01" /> <link name="camera"><visual><geometry><box size="${camera_length} ${camera_width} ${camera_height}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /><material name="black" /></visual><collision><geometry><box size="${camera_length} ${camera_width} ${camera_height}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /></collision><xacro:Box_inertial_matrix m="${camera_m}" l="${camera_length}" w="${camera_width}" h="${camera_height}" /></link><joint name="camera2base_link" type="fixed"><parent link="base_link" /><child link="camera" /><origin xyz="${camera_x} ${camera_y} ${camera_z}" /></joint><gazebo reference="camera"><material>Gazebo/Blue</material></gazebo>
</robot>
my_car_camera.urdf.xacro:
<robot name="my_laser" xmlns:xacro="http://wiki.ros.org/xacro"><xacro:property name="support_length" value="0.15" /> <xacro:property name="support_radius" value="0.01" /> <xacro:property name="support_x" value="0.0" /> <xacro:property name="support_y" value="0.0" /> <xacro:property name="support_z" value="${base_link_length / 2 + support_length / 2}" /> <xacro:property name="support_m" value="0.02" /> <link name="support"><visual><geometry><cylinder radius="${support_radius}" length="${support_length}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /><material name="red"><color rgba="0.8 0.2 0.0 0.8" /></material></visual><collision><geometry><cylinder radius="${support_radius}" length="${support_length}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /></collision><xacro:cylinder_inertial_matrix m="${support_m}" r="${support_radius}" h="${support_length}" /></link><joint name="support2base_link" type="fixed"><parent link="base_link" /><child link="support" /><origin xyz="${support_x} ${support_y} ${support_z}" /></joint><gazebo reference="support"><material>Gazebo/White</material></gazebo><xacro:property name="laser_length" value="0.05" /> <xacro:property name="laser_radius" value="0.03" /> <xacro:property name="laser_x" value="0.0" /> <xacro:property name="laser_y" value="0.0" /> <xacro:property name="laser_z" value="${support_length / 2 + laser_length / 2}" /> <xacro:property name="laser_m" value="0.1" /> <link name="laser"><visual><geometry><cylinder radius="${laser_radius}" length="${laser_length}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /><material name="black" /></visual><collision><geometry><cylinder radius="${laser_radius}" length="${laser_length}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /></collision><xacro:cylinder_inertial_matrix m="${laser_m}" r="${laser_radius}" h="${laser_length}" /></link><joint name="laser2support" type="fixed"><parent link="support" /><child link="laser" /><origin xyz="${laser_x} ${laser_y} ${laser_z}" /></joint><gazebo reference="laser"><material>Gazebo/Black</material></gazebo>
</robot>
my_laser.urdf.xacro:
<robot name="my_car_camera" xmlns:xacro="http://wiki.ros.org/xacro"><xacro:include filename="gazebo_head.xacro" /><xacro:include filename="gazebo_car.xacro" /><xacro:include filename="gazebo_laser.xacro" /><xacro:include filename="gazebo_camera.xacro" />
</robot>
在终端进入launch目录
vim gazebo_car.launch
在打开的文件中写入:
<launch><param name="robot_description" command="$(find xacro)/xacro $(find urdf_gazebo)/urdf/xacro/gazebo_car_union.xacro" /><include file="$(find gazebo_ros)/launch/empty_world.launch" /><node pkg="gazebo_ros" type="spawn_model" name="model" args="-urdf -model mycar -param robot_description" />
</launch>
四、orbslam2+kitti
1.下载
-
下载依赖:https://gitcode.com/raulmur/ORB_SLAM2/overview?tab=readme-ov-file&utm_source=csdn_github_accelerator&isLogin=1
-
下载Pangolin
cd Pangolin
mkdir build && cd build
cmake ..
sudo make -j8
- 下载Ceres
sudo apt-get install liblapack-dev libsuitesparse-dev libcxsparse3 libgflags-dev libgoogle-glog-dev libgtest-dev
cd ceres-solver
mkdir build && cd build
cmake ..
sudo make -j8
sudo make install
- 下载g2o
sudo apt-get install qt5-qmake qt5-default libqglviewer-dev-qt5 libsuitesparse-dev libcxsparse3 libcholmod3
cd g2o
mkdir build && cd build
cmake ..
sudo make -j8
sudo make install
- 下载DBoW3
mkdir build
cd build/
cmake ..
make
sudo make install
2.安装编译ORB_SLAM2
(1)下载ORB_SLAM2的安装包
sudo apt-get install ORB_SLAM2
(2)配置环境
cd ~/catkin_ws/src/ORB_SLAM2
sudo chmod +x build.sh
./build.sh
(3)使用ROS编译
sudo chmod +x build_ros.sh
./build_ros.sh
3.运行Kitee数据集
-
下载数据集:https://www.cvlibs.net/datasets/kitti/eval_odometry.php
-
运行ORB_SLAM2
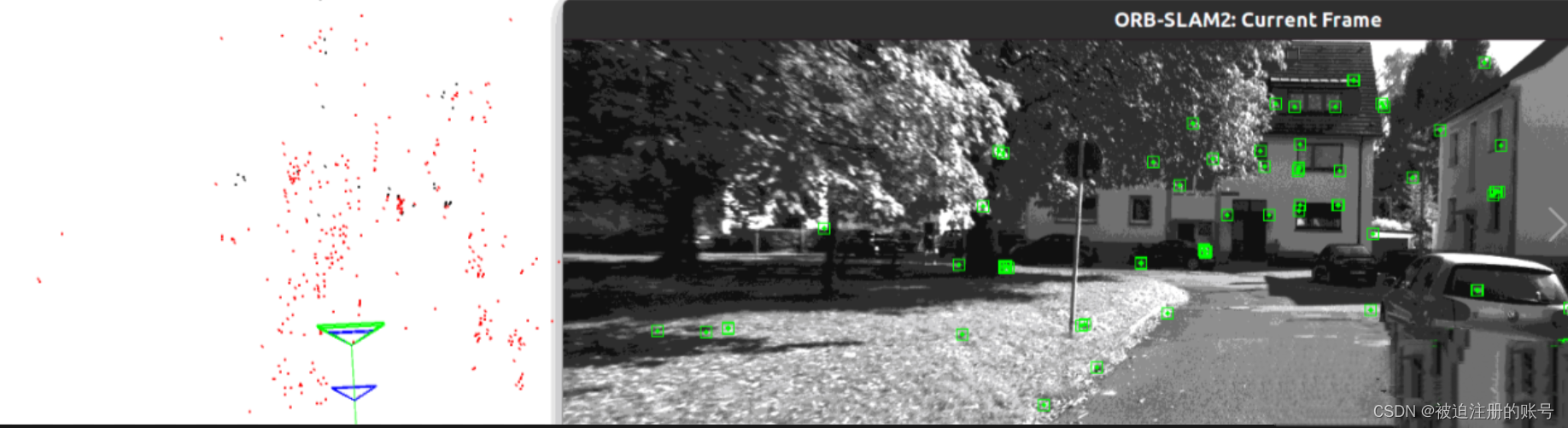
相关文章:
ROS机器人小车建模仿真与SLAM
文章目录 一、URDF二、创建小车模型1.创建功能包2.导入依赖3.创建urdf,launch文件:4.可视化 三、添加雷达1.xacro文件2.集成和修改launch3.添加摄像头和雷达 三.GAZEBO仿真四、orbslam2kitti1.下载2.安装编译ORB_SLAM23.运行Kitee数据集 一、URDF URDFÿ…...
Windows10安装Docker Desktop(实操步骤版)
1,下载Docker Desktop 官网下载地址: https://desktop.docker.com/win/stable/amd64/Docker%20Desktop%20Installer.exe 国内镜像下载地址(本人下载这个): https://smartidedl.blob.core.chinacloudapi.cn/docker/2…...
)
Leetcode 45. 跳跃游戏 II(DP 双指针)
Leetcode 45. 跳跃游戏 II 动态规划 使用dp [ ] 记录每个位置可达的最小步数,每到达一个点时,更新该点所能跳跃区间内的所有点的dp值 时间复杂度较高 class Solution {public int jump(int[] nums) {int n nums.length;int dp[] new int [n];int N …...
(实时更新))
Codeforces Round 952 (Div. 4)(实时更新)
A - Creating Words 题意:略 代码: #include<bits/stdc.h> #define ios ios::sync_with_stdio(0),cin.tie(0),cout.tie(0)//不能使用scanf了 #define int long long #define loop(n) for(int i0;i<n;i) #define rloop(n) for(int in-1;i>…...
【AI实践】Dify开发应用和对接微信
自定义应用 创建应用有2种, 从应用模板创建 空白应用,也就是自定义应用 选择翻译助手 Translation assistant模板创建一个应用 自定义应用,创建一个child_accompany_bot自定的应用,用来支持家长,如何解决低龄儿童的…...

精准定位,智慧提纯:高级数据提取策略
在数据驱动的时代,高级数据提取策略成为企业决策、科学研究以及各类项目成功的关键。数据提取,不仅仅是简单地收集信息,而是需要精准定位目标数据,并通过智慧提纯方法,从海量数据中提取出有价值、有深度的信息。本文将…...

USB转I2C转SPI芯片CH341与CH347比较
1. 芯片中文资料: USB转I2C转SPI芯片CH341 高速USB转接芯片CH347转9M双串口转I2C转SPI转JTAG转SWD USB2.0高速转接芯片CH347应用开发手册 2. CH341与CH347比较: 类别CH341CH347备注串口速度2M9MCH347的串口速度更快设置CH341的I2C或SPI不能与串口同…...
举例以及期权无套利定价公式)
期权无风险套利(Risk-Free Arbitrage)举例以及期权无套利定价公式
期权市场的无风险套利 中文版 期权市场中的套利实例 为了清楚地说明,让我们通过一个现实的例子来展示套利。 期权市场中的套利实例 假设市场上有以下价格: 标的股票价格:100美元欧式看涨期权(行权价100美元,3个月…...
)
Java基础知识巩固自测(上)
前言 该文章适用于已初步了解Java基础知识的入门学习者,便于快速回顾知识点,查漏补缺。 内容包括:Java面向对象相关知识、SQL基础语法 复习建议技巧 实用3W思维法(What、Why、How) 1. What(什么&#x…...
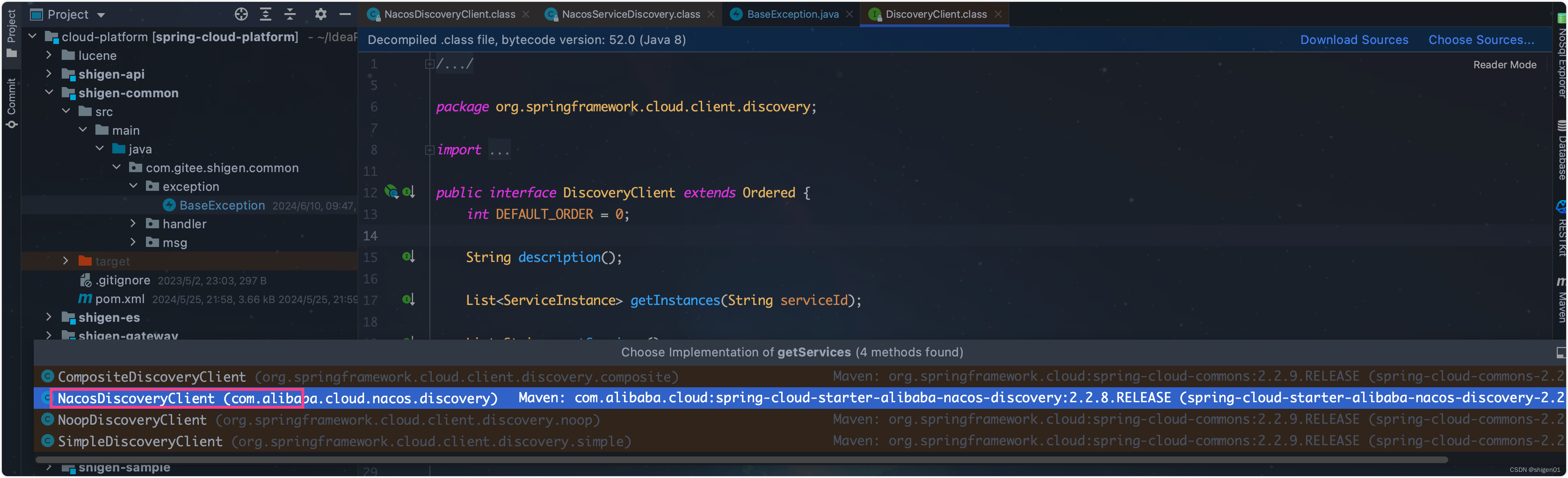
通过 Python+Nacos实现微服务,细解微服务架构
shigen坚持更新文章的博客写手,擅长Java、python、vue、shell等编程语言和各种应用程序、脚本的开发。记录成长,分享认知,留住感动。 个人IP:shigen 背景 一直以来的想法比较多,然后就用Python编写各种代码脚本。很多…...

如何使用new和delete操作符进行动态内存分配和释放?
在C中,new 和 delete 操作符用于在堆(heap)上动态地分配和释放内存。这是管理内存的一种重要方式,特别是在需要创建可变数量或生命周期与程序执行流程不一致的对象时。 使用 new 进行动态内存分配 当你使用 new 操作符时&#x…...

【SCAU数据挖掘】数据挖掘期末总复习题库选择题及解析
1.将原始数据进行集成、变换、维度规约、数值规约是在以下哪个步骤的任务?( C ) A.频繁模式挖掘 B.分类和预测 C.数据预处理 D.数据流挖掘 解析:数据预处理是数据分析和数据挖掘的重要步骤之一,包括数据清洗、集成、变换、规约(如维度规约、数值规约)等。这…...
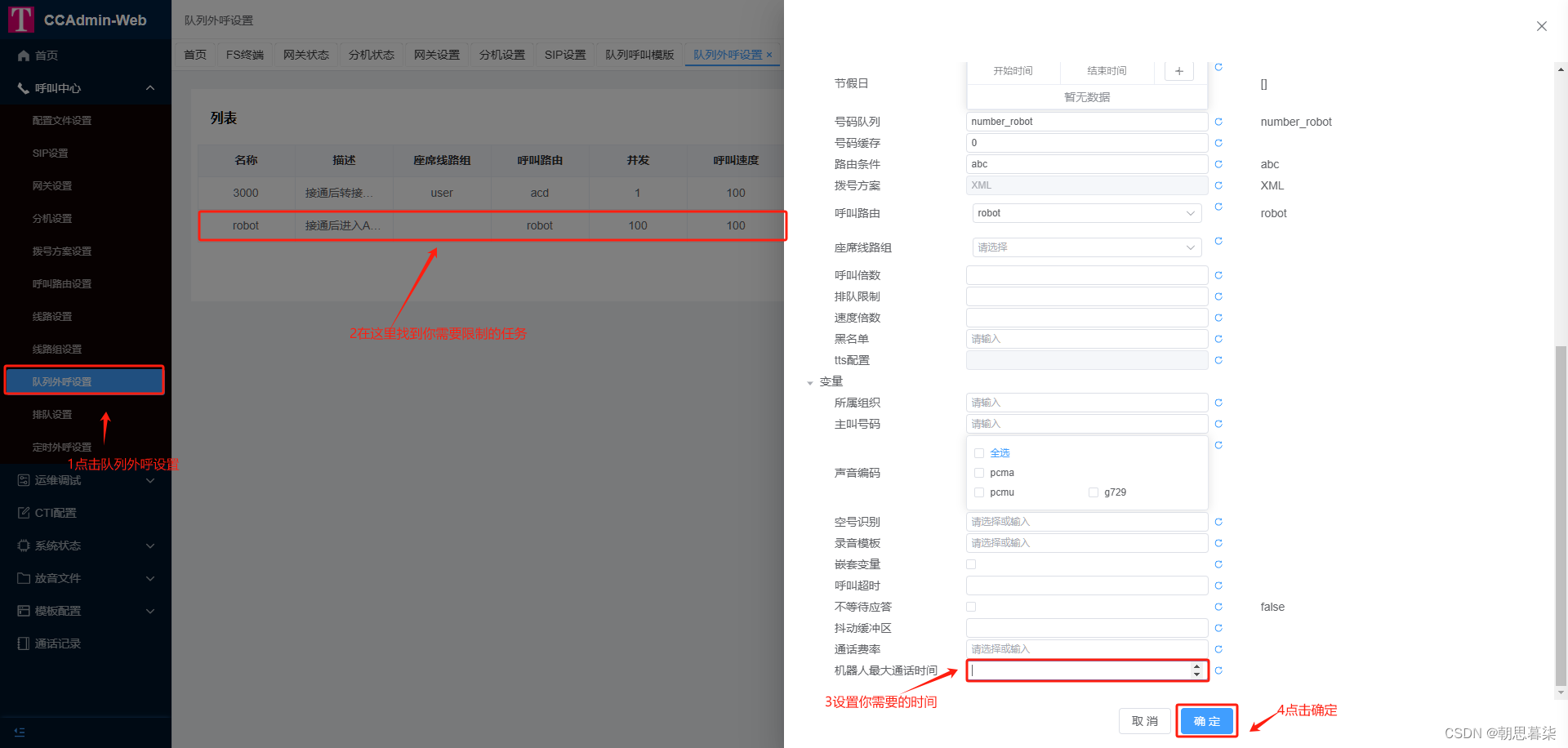
顶顶通呼叫中心中间件-限制最大通话时间(mod_cti基于FreeSWITCH)
顶顶通呼叫中心中间件-限制最大通话时间(mod_cti基于FreeSWITCH) 一、最大通话时间 1、配置拨号方案 1、点击拨号方案 ->2、在框中输入通话最大时长->3、点击添加->4、根据图中配置->5、勾选continue。修改拨号方案需要等待一分钟即可生效 action"sched…...

深度学习:使用argparse 模块
在深度学习中,结合 Bash 脚本和 argparse 模块,可以实现高效的任务自动化和参数管理。Bash 脚本可以用来调度任务和管理环境,而 argparse 模块可以用来解析命令行参数,控制深度学习模型的训练和评估过程。 1.argparse 模块 argp…...

unity text根据文本内容自动设置高度
我们经常会遇到需要根据文字数量动态修改文本框高度的需求,我们可以使用文本的行数*每行的高度来计算文本框的高度,伪代码如下: int oneLineHight 50;// 每行的像素高度 private void ResetTextHight(string str) {//设置文字内容ShowText.…...

ARM 汇编 C语言 for循环
在使用 Keil 编译基于 STM32F103 的 C 语言程序时,生成的汇编代码会有一些不同。STM32F103 是基于 ARM Cortex-M3 内核的微控制器,因为汇编语言是 ARM 汇编,而不是 x86 汇编。 示例 C 代码 假设我们有如下的简单 C 语言 for 循环代码&#x…...
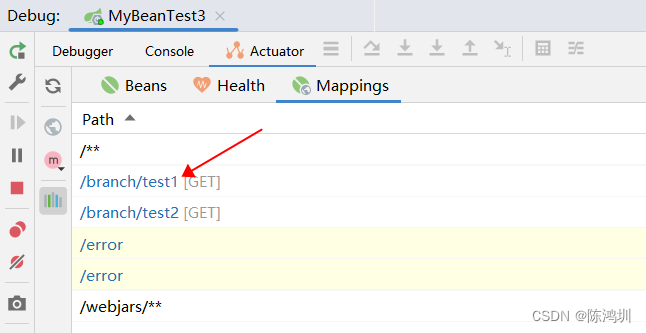
java:【@ComponentScan】和【@SpringBootApplication】扫包范围的冲突
# 代码结构如下: 注意【com.chz.myBean.branch】和【com.chz.myBean.main】这两个包是没有生重叠的。 主程序【MyBeanTest1、MyBeanTest2、MyBeanTest3】这两个类是在包【com.chz.myBean.main】下 # 示例代码 【pom.xml】 <dependency><groupId>org.…...
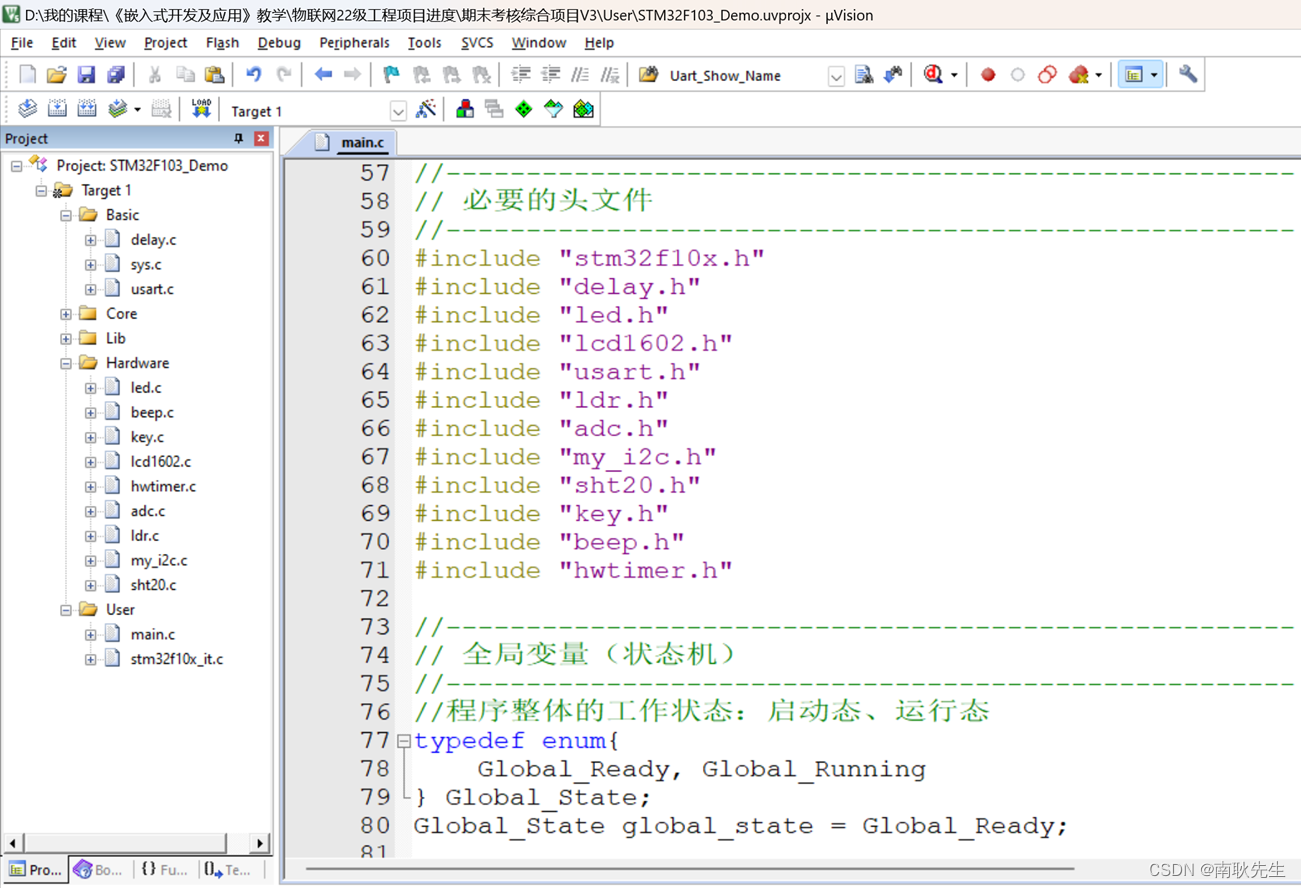
本学期嵌入式期末考试的综合项目,我是这么出题的
时间过得真快,临近期末,又到了老师出卷的时候。作为《嵌入式开发及应用》这门课的主讲教师,今年给学生出的题目有一点点难度,最后的综合项目要求如下所示,各位学生朋友和教师同行可以评论一下难度如何,单片…...
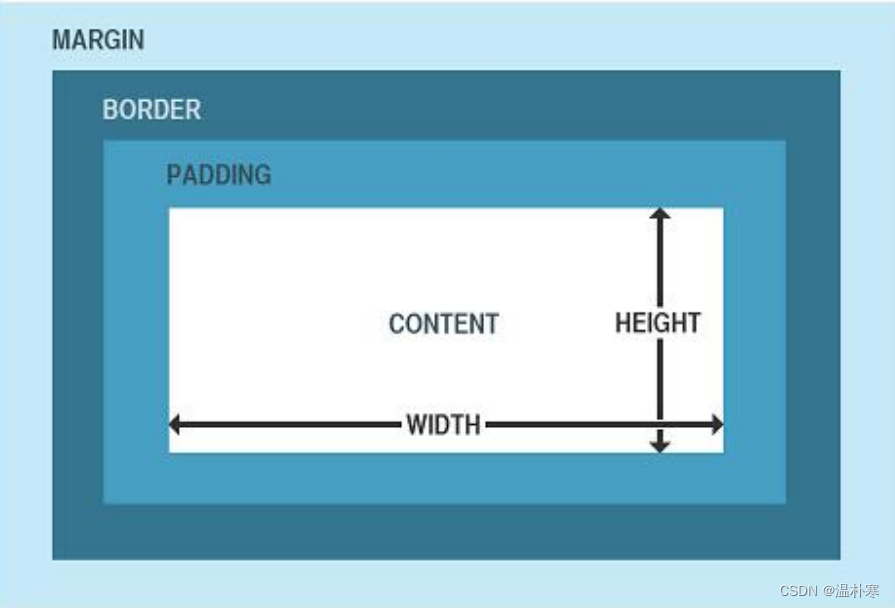
CSS概述
CSS是一种样式表语言,用于为HTML文档控制外观,定义布局。例如, CSS涉及字体、颜色、边距、高度、宽度、背景图像、高级定位等方面 。 ● 可将页面的内容与表现形式分离,页面内容存放在HTML文档中,而用 于定义表现形式…...
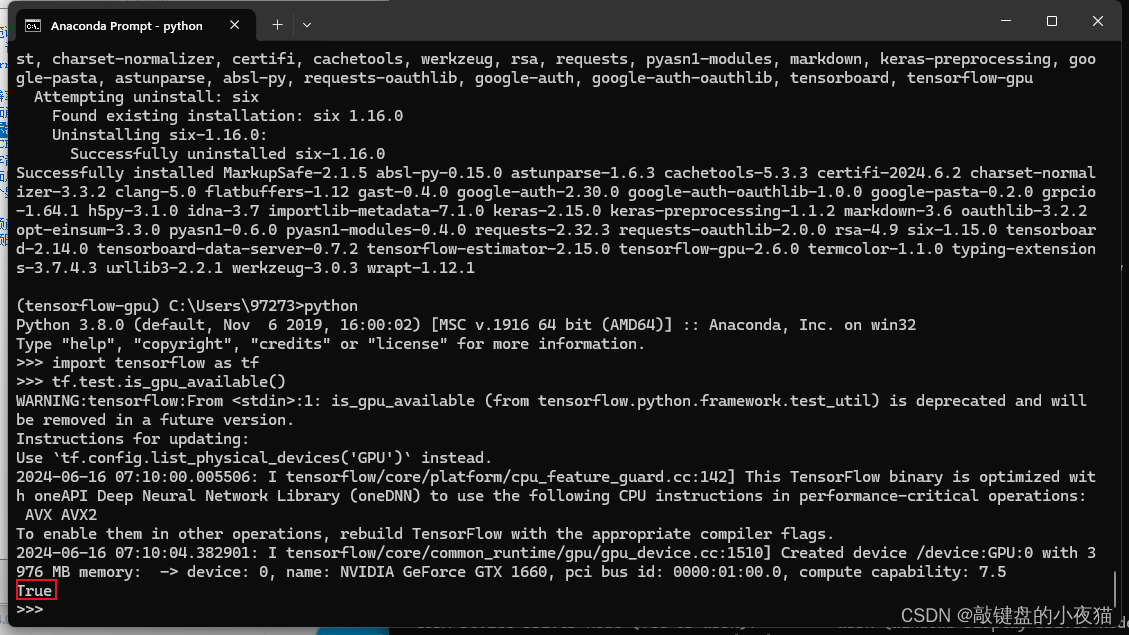
Tensorflow-GPU工具包了解和详细安装方法
目录 基础知识信息了解 显卡算力 CUDA兼容 Tensorflow gpu安装 CUDA/cuDNN匹配和下载 查看Conda driver的版本 下载CUDA工具包 查看对应cuDNN版本 下载cuDNN加速库 CUDA/cuDNN安装 CUDA安装方法 cuDNN加速库安装 配置CUDA/cuDNN环境变量 配置环境变量 核验是否安…...
)
进程地址空间(比特课总结)
一、进程地址空间 1. 环境变量 1 )⽤户级环境变量与系统级环境变量 全局属性:环境变量具有全局属性,会被⼦进程继承。例如当bash启动⼦进程时,环 境变量会⾃动传递给⼦进程。 本地变量限制:本地变量只在当前进程(ba…...

FFmpeg 低延迟同屏方案
引言 在实时互动需求激增的当下,无论是在线教育中的师生同屏演示、远程办公的屏幕共享协作,还是游戏直播的画面实时传输,低延迟同屏已成为保障用户体验的核心指标。FFmpeg 作为一款功能强大的多媒体框架,凭借其灵活的编解码、数据…...

在HarmonyOS ArkTS ArkUI-X 5.0及以上版本中,手势开发全攻略:
在 HarmonyOS 应用开发中,手势交互是连接用户与设备的核心纽带。ArkTS 框架提供了丰富的手势处理能力,既支持点击、长按、拖拽等基础单一手势的精细控制,也能通过多种绑定策略解决父子组件的手势竞争问题。本文将结合官方开发文档,…...
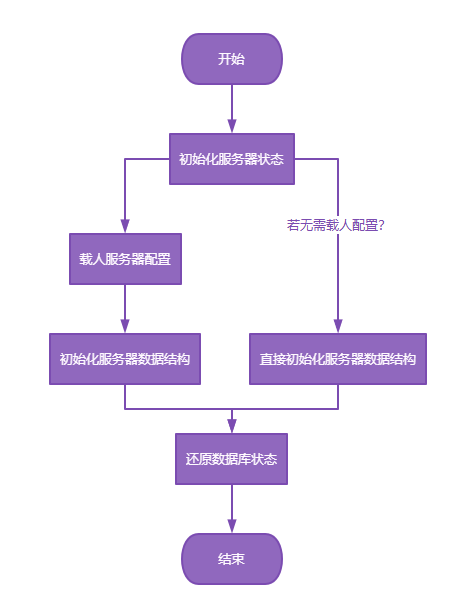
【Redis技术进阶之路】「原理分析系列开篇」分析客户端和服务端网络诵信交互实现(服务端执行命令请求的过程 - 初始化服务器)
服务端执行命令请求的过程 【专栏简介】【技术大纲】【专栏目标】【目标人群】1. Redis爱好者与社区成员2. 后端开发和系统架构师3. 计算机专业的本科生及研究生 初始化服务器1. 初始化服务器状态结构初始化RedisServer变量 2. 加载相关系统配置和用户配置参数定制化配置参数案…...

【算法训练营Day07】字符串part1
文章目录 反转字符串反转字符串II替换数字 反转字符串 题目链接:344. 反转字符串 双指针法,两个指针的元素直接调转即可 class Solution {public void reverseString(char[] s) {int head 0;int end s.length - 1;while(head < end) {char temp …...

【python异步多线程】异步多线程爬虫代码示例
claude生成的python多线程、异步代码示例,模拟20个网页的爬取,每个网页假设要0.5-2秒完成。 代码 Python多线程爬虫教程 核心概念 多线程:允许程序同时执行多个任务,提高IO密集型任务(如网络请求)的效率…...

MySQL用户和授权
开放MySQL白名单 可以通过iptables-save命令确认对应客户端ip是否可以访问MySQL服务: test: # iptables-save | grep 3306 -A mp_srv_whitelist -s 172.16.14.102/32 -p tcp -m tcp --dport 3306 -j ACCEPT -A mp_srv_whitelist -s 172.16.4.16/32 -p tcp -m tcp -…...

安全突围:重塑内生安全体系:齐向东在2025年BCS大会的演讲
文章目录 前言第一部分:体系力量是突围之钥第一重困境是体系思想落地不畅。第二重困境是大小体系融合瓶颈。第三重困境是“小体系”运营梗阻。 第二部分:体系矛盾是突围之障一是数据孤岛的障碍。二是投入不足的障碍。三是新旧兼容难的障碍。 第三部分&am…...

SQL慢可能是触发了ring buffer
简介 最近在进行 postgresql 性能排查的时候,发现 PG 在某一个时间并行执行的 SQL 变得特别慢。最后通过监控监观察到并行发起得时间 buffers_alloc 就急速上升,且低水位伴随在整个慢 SQL,一直是 buferIO 的等待事件,此时也没有其他会话的争抢。SQL 虽然不是高效 SQL ,但…...

C#中的CLR属性、依赖属性与附加属性
CLR属性的主要特征 封装性: 隐藏字段的实现细节 提供对字段的受控访问 访问控制: 可单独设置get/set访问器的可见性 可创建只读或只写属性 计算属性: 可以在getter中执行计算逻辑 不需要直接对应一个字段 验证逻辑: 可以…...