树莓派4B_OpenCv学习笔记10:调整视频帧大小
今日继续学习树莓派4B 4G:(Raspberry Pi,简称RPi或RasPi)
本人所用树莓派4B 装载的系统与版本如下:
版本可用命令 (lsb_release -a) 查询:
Opencv 版本是4.5.1:
今日学习一下如何降低视频帧像素
文章提供测试代码讲解,整体代码贴出、测试效果图
目录
调整视频帧大小:
编写代码:
效果展示:
解决motion视频流卡顿问题:
下载motion配置:
更改配置:
网上学习资料贴出:
调整视频帧大小:
编写代码:
# coding=utf-8 import cv2 # 打开摄像头,0通常是默认摄像头的索引 cap = cv2.VideoCapture(0) # 设置目标分辨率 target_resolution = (320, 240) # 创建VideoWriter对象,指定输出视频的文件名、编码器、帧率、帧大小等 fourcc = cv2.VideoWriter_fourcc(*'MJPG') # 使用MJPG编码器 out = cv2.VideoWriter('output_video.avi', fourcc, 20.0, target_resolution)if not cap.isOpened(): print("Error opening video stream or file") else: frame_count = 0 # 初始化帧计数器 while True: # 读取一帧图像 ret, frame = cap.read() # 检查帧是否正确读取 if not ret: print("Can't receive frame (stream end?). Exiting ...") break # 调整帧大小 resized_frame = cv2.resize(frame, target_resolution, interpolation = cv2.INTER_LINEAR) # 写入新的视频文件 out.write(resized_frame) # 显示图像 cv2.imshow('Video Stream_resized_frame', resized_frame) # 等待键盘输入,如果按下'q'则退出循环 key = cv2.waitKey(1) & 0xFF if key == ord('q'): break # 如果按下'c',则保存当前帧 elif key == ord('c'): # 定义保存图片的文件路径和名称,包含递增的编号 # 使用04d来确保编号是四位数,并填充前导零 file_path = f'/home/pi/Pictures/your_image_{frame_count:04d}.jpg' cv2.imwrite(file_path, frame) print(f"Image saved successfully: {file_path}") frame_count += 1 # 递增计数器 # 释放摄像头 cap.release() # 关闭所有OpenCV窗口 cv2.destroyAllWindows()
效果展示:
发现像素确实变小了:

解决motion视频流卡顿问题:
SSH传输视频卡顿取决于网络速度,这里的步骤解决不了SSH远程连接的视频流卡顿问题,只能连接显示器运行Python脚本
下载motion配置:
sudo apt-get update
sudo apt-get install motion把文件中 "start_motion_daemon=no" 改为yes
sudo nano /etc/default/motion


更改配置:
sudo nano /etc/motion/motion.conf按下ctrl+w进行搜索:
搜素 # Start in daemon (background) mode and release terminal (default: off)
将off改为on
搜素 # Image width (pixels). Valid range: Camera dependent, default: 320
根据需要更改摄像头宽度高度:
搜素 # Maximum number of frames to be captured per second.
根据需要更改帧率,50左右为佳,之前卡慢是因为帧率为2...
搜素 # Restrict stream connections to localhost only (default: on)
将on改为off
搜素 # Maximum framerate for stream streams (default: 1)
改为100或者其余较大的数
最后按下ctrl+o 然后回车 保存,ctrl+x退出!




网上学习资料贴出:
树莓派4B motion摄像头(解决卡顿)相关配置_树莓派摄像头拍照延时高-CSDN博客
【CV】树莓派+OpenCV-python解决摄像头分辨率及帧率过低无法调整问题_树莓派如何设置摄像头的分辨率-CSDN博客
Python+Opencv读取高帧率USB摄像头问题_树莓派4b摄像头帧率能不能到120帧-CSDN博客
相关文章:

树莓派4B_OpenCv学习笔记10:调整视频帧大小
今日继续学习树莓派4B 4G:(Raspberry Pi,简称RPi或RasPi) 本人所用树莓派4B 装载的系统与版本如下: 版本可用命令 (lsb_release -a) 查询: Opencv 版本是4.5.1: 今日学习一下如何降低视频帧像素 文章提供测试代码讲解…...
:数据过滤)
MySQL 保姆级教程(五):数据过滤
第 7 章 数据过滤 7.1 组合 WHERE 子句 MySQL 允许给出多个 WHERE 子句,这些子句可用用两种方式使用:AND 或 OR 操作符 7.1.1 AND 操作符 输入: SELECT server_cost.cost_name,server_cost.cost_value,server_cost.default_value FROM server_cost W…...

《全职猎人》
《全职猎人》 [1-2]是日本漫画家富坚义博的作品。 1999年版改编电视动画由日本动画公司负责动画制作,于1999年10月16日-2001年3月30日在富士电视台播出,该动画的故事至贪婪之岛篇章结束,全92话。 该作在富坚义博老师天马行空的想…...

Linux各目录的作用
Linux各目录的作用 目录作用~登录用户对应的目录.当前工作目录$PATH环境变量/根目录/boot启动Linux使用的文件,例如Linux内核,包括连接文件和镜像文件,(删了就启动不了了)/bin(/usr/bin,/usr/local/bin)Binary&#x…...

Windows Docker Desktop 安装 postgres
Docker Desktop安装 postgres 12.6 数据库 step docker pull postgres:12.6提前创建F:/D-dockerData/postgres-12.6/data 文件夹用于bind mountdocker run docker run --name postgres-12.6 \-e POSTGRES_PASSWORD123456 \-p 5432:5432 \-v F:/D-dockerData/postgres-12.6/d…...

C# OpenCvSharp Mat操作-创建Mat-构造函数
🌟 Mat类:图像与多维矩阵的魔法 ✨ Mat类是OpenCvSharp中用于表示图像和多维矩阵的核心类。它提供了多种构造函数来创建和初始化矩阵对象。下面我们逐一解释这些构造函数,并通过示例来说明它们的用法。📸 🚀 默认构造函数 Mat() 创建一个空的Mat对象。 Mat mat = …...

【制作100个unity游戏之29】使用unity复刻经典游戏《愤怒的小鸟》(完结,附带项目源码)
最终效果 文章目录 最终效果前言素材下载简单搭建环境控制小鸟生成弹簧 限制小鸟的控制范围弹簧线的显示隐藏飞行新增木头木头销毁不同血量的木头状态配置更多物品爆炸效果创建敌人的小猪创建多个小鸟循环游戏结束相机跟随加分特效不同定义技能的鸟加速鸟回旋鸟爆炸鸟效果 轨迹…...
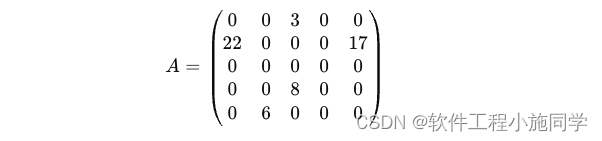
稀疏矩阵是什么 如何求
稀疏矩阵是一种特殊类型的矩阵,其中大多数元素都是零。由于稀疏矩阵中非零元素的数量远少于零元素,因此可以使用特定的数据结构和算法来高效地存储和处理它们,从而节省存储空间和计算时间。 RowPtr 数组中的每个元素表示对应行的第一个非零元…...
 -- SOCKET : Unix domain)
57.Linux/Unix 系统编程手册(下) -- SOCKET : Unix domain
https://blog.51cto.com/u_15567199/5204540 【linux网络编程】容错处理文件 wrap.h、wrap.c_wx623c6c9. // 容错处理 wrap.h #ifndef _WRAP_H_ #define _WRAP_H_#include <stdio.h> #include <stdlib.h> #include <unistd.h> #include <error.h> #i…...
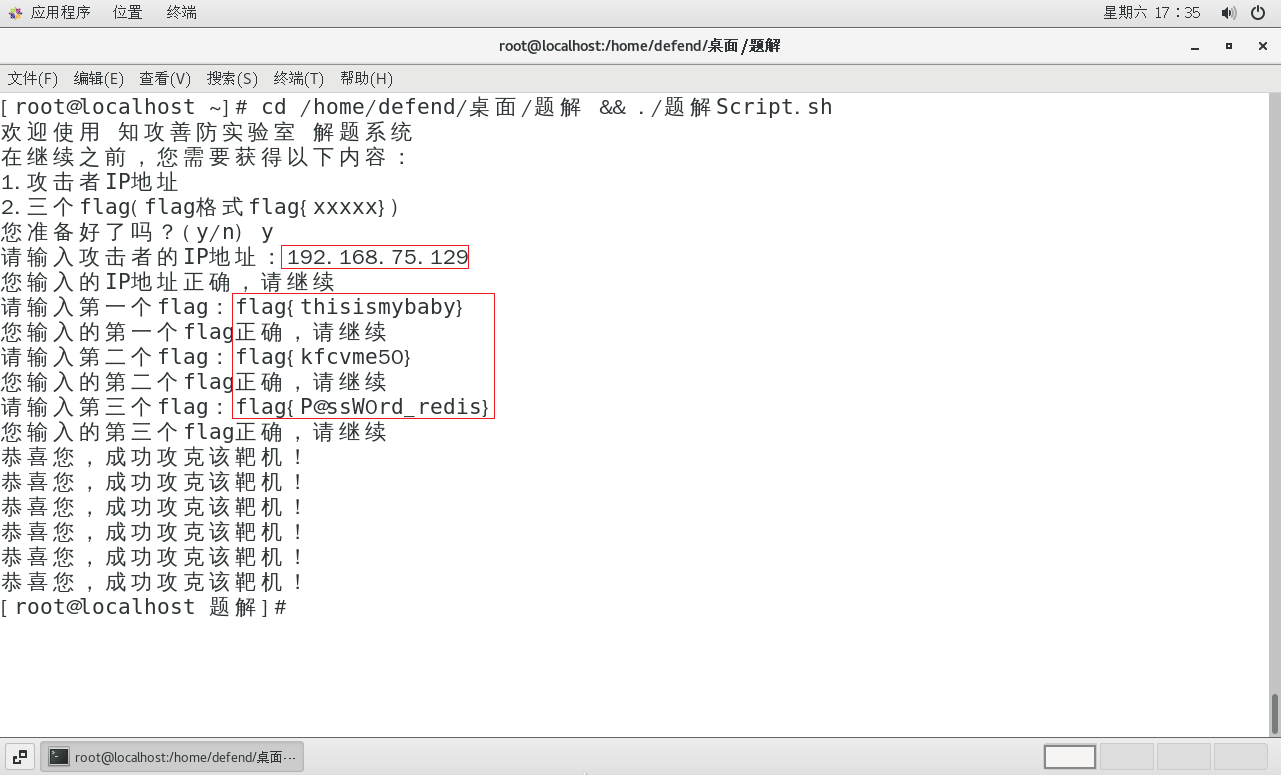
Hvv--知攻善防应急响应靶机--Linux1
HW–应急响应靶机–Linux1 所有靶机均来自 知攻善防实验室 靶机整理: 夸克网盘:https://pan.quark.cn/s/4b6dffd0c51a#/list/share百度云盘:https://pan.baidu.com/s/1NnrS5asrS1Pw6LUbexewuA?pwdtxmy 官方WP:https://mp.weixin.…...

Solus Linux: 有自己的软件包管理器
Solus Linux 是一个独立的 Linux 发行版,它以简单易用和现代化的用户体验而著称。Solus Linux 使用的包管理器是 eopkg,它具有以下优势和特点: 用户友好的界面:eopkg 提供了一个简洁直观的命令行界面,使得用户可以轻松…...

Java GUI编程
引言 图形用户界面(GUI)编程是使应用程序与用户进行交互的重要部分。Java提供了多种用于GUI开发的工具和库,最常用的是Swing和AWT。本文将详细介绍Java GUI编程的基础知识,包括Swing和AWT框架、事件处理以及高级GUI组件的使用&…...
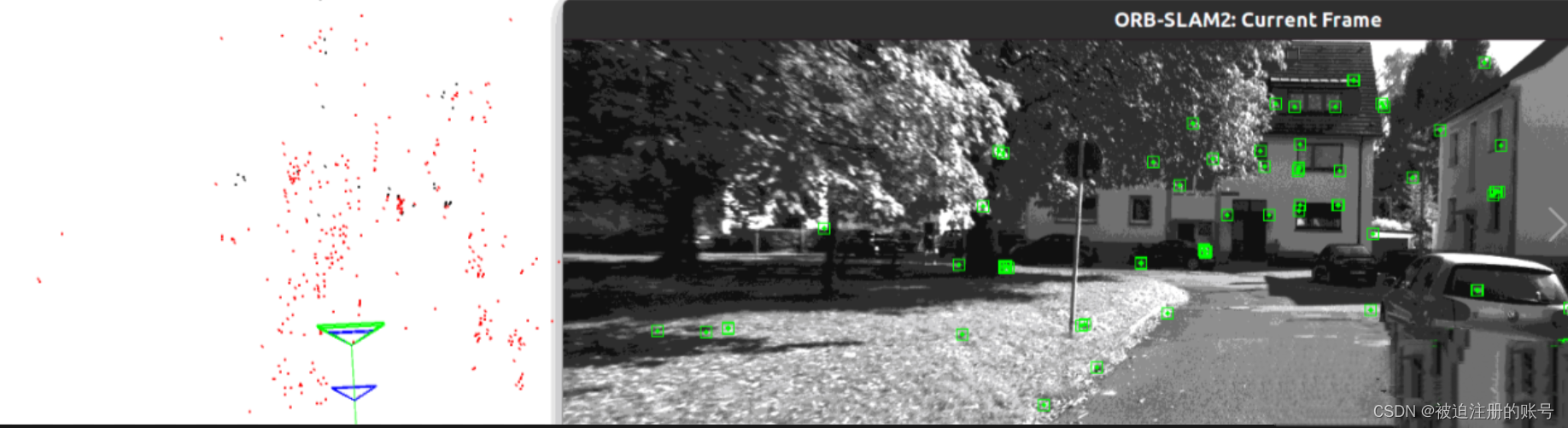
ROS机器人小车建模仿真与SLAM
文章目录 一、URDF二、创建小车模型1.创建功能包2.导入依赖3.创建urdf,launch文件:4.可视化 三、添加雷达1.xacro文件2.集成和修改launch3.添加摄像头和雷达 三.GAZEBO仿真四、orbslam2kitti1.下载2.安装编译ORB_SLAM23.运行Kitee数据集 一、URDF URDFÿ…...
Windows10安装Docker Desktop(实操步骤版)
1,下载Docker Desktop 官网下载地址: https://desktop.docker.com/win/stable/amd64/Docker%20Desktop%20Installer.exe 国内镜像下载地址(本人下载这个): https://smartidedl.blob.core.chinacloudapi.cn/docker/2…...
)
Leetcode 45. 跳跃游戏 II(DP 双指针)
Leetcode 45. 跳跃游戏 II 动态规划 使用dp [ ] 记录每个位置可达的最小步数,每到达一个点时,更新该点所能跳跃区间内的所有点的dp值 时间复杂度较高 class Solution {public int jump(int[] nums) {int n nums.length;int dp[] new int [n];int N …...
(实时更新))
Codeforces Round 952 (Div. 4)(实时更新)
A - Creating Words 题意:略 代码: #include<bits/stdc.h> #define ios ios::sync_with_stdio(0),cin.tie(0),cout.tie(0)//不能使用scanf了 #define int long long #define loop(n) for(int i0;i<n;i) #define rloop(n) for(int in-1;i>…...
【AI实践】Dify开发应用和对接微信
自定义应用 创建应用有2种, 从应用模板创建 空白应用,也就是自定义应用 选择翻译助手 Translation assistant模板创建一个应用 自定义应用,创建一个child_accompany_bot自定的应用,用来支持家长,如何解决低龄儿童的…...

精准定位,智慧提纯:高级数据提取策略
在数据驱动的时代,高级数据提取策略成为企业决策、科学研究以及各类项目成功的关键。数据提取,不仅仅是简单地收集信息,而是需要精准定位目标数据,并通过智慧提纯方法,从海量数据中提取出有价值、有深度的信息。本文将…...

USB转I2C转SPI芯片CH341与CH347比较
1. 芯片中文资料: USB转I2C转SPI芯片CH341 高速USB转接芯片CH347转9M双串口转I2C转SPI转JTAG转SWD USB2.0高速转接芯片CH347应用开发手册 2. CH341与CH347比较: 类别CH341CH347备注串口速度2M9MCH347的串口速度更快设置CH341的I2C或SPI不能与串口同…...
举例以及期权无套利定价公式)
期权无风险套利(Risk-Free Arbitrage)举例以及期权无套利定价公式
期权市场的无风险套利 中文版 期权市场中的套利实例 为了清楚地说明,让我们通过一个现实的例子来展示套利。 期权市场中的套利实例 假设市场上有以下价格: 标的股票价格:100美元欧式看涨期权(行权价100美元,3个月…...

Docker 离线安装指南
参考文章 1、确认操作系统类型及内核版本 Docker依赖于Linux内核的一些特性,不同版本的Docker对内核版本有不同要求。例如,Docker 17.06及之后的版本通常需要Linux内核3.10及以上版本,Docker17.09及更高版本对应Linux内核4.9.x及更高版本。…...

智能在线客服平台:数字化时代企业连接用户的 AI 中枢
随着互联网技术的飞速发展,消费者期望能够随时随地与企业进行交流。在线客服平台作为连接企业与客户的重要桥梁,不仅优化了客户体验,还提升了企业的服务效率和市场竞争力。本文将探讨在线客服平台的重要性、技术进展、实际应用,并…...

基于数字孪生的水厂可视化平台建设:架构与实践
分享大纲: 1、数字孪生水厂可视化平台建设背景 2、数字孪生水厂可视化平台建设架构 3、数字孪生水厂可视化平台建设成效 近几年,数字孪生水厂的建设开展的如火如荼。作为提升水厂管理效率、优化资源的调度手段,基于数字孪生的水厂可视化平台的…...
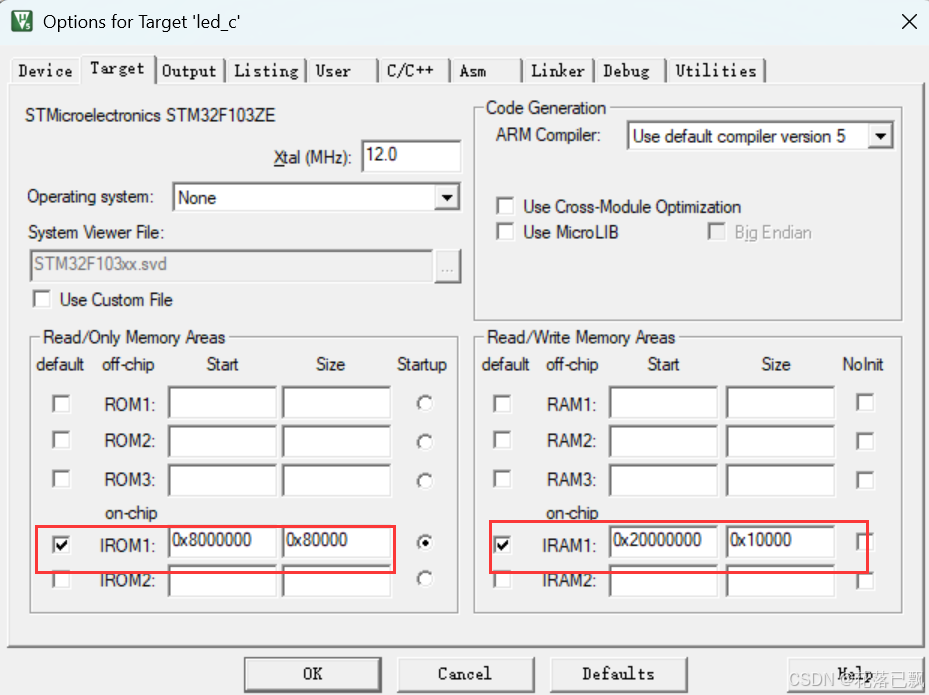
Keil 中设置 STM32 Flash 和 RAM 地址详解
文章目录 Keil 中设置 STM32 Flash 和 RAM 地址详解一、Flash 和 RAM 配置界面(Target 选项卡)1. IROM1(用于配置 Flash)2. IRAM1(用于配置 RAM)二、链接器设置界面(Linker 选项卡)1. 勾选“Use Memory Layout from Target Dialog”2. 查看链接器参数(如果没有勾选上面…...

基于Docker Compose部署Java微服务项目
一. 创建根项目 根项目(父项目)主要用于依赖管理 一些需要注意的点: 打包方式需要为 pom<modules>里需要注册子模块不要引入maven的打包插件,否则打包时会出问题 <?xml version"1.0" encoding"UTF-8…...

unix/linux,sudo,其发展历程详细时间线、由来、历史背景
sudo 的诞生和演化,本身就是一部 Unix/Linux 系统管理哲学变迁的微缩史。来,让我们拨开时间的迷雾,一同探寻 sudo 那波澜壮阔(也颇为实用主义)的发展历程。 历史背景:su的时代与困境 ( 20 世纪 70 年代 - 80 年代初) 在 sudo 出现之前,Unix 系统管理员和需要特权操作的…...

使用 Streamlit 构建支持主流大模型与 Ollama 的轻量级统一平台
🎯 使用 Streamlit 构建支持主流大模型与 Ollama 的轻量级统一平台 📌 项目背景 随着大语言模型(LLM)的广泛应用,开发者常面临多个挑战: 各大模型(OpenAI、Claude、Gemini、Ollama)接口风格不统一;缺乏一个统一平台进行模型调用与测试;本地模型 Ollama 的集成与前…...
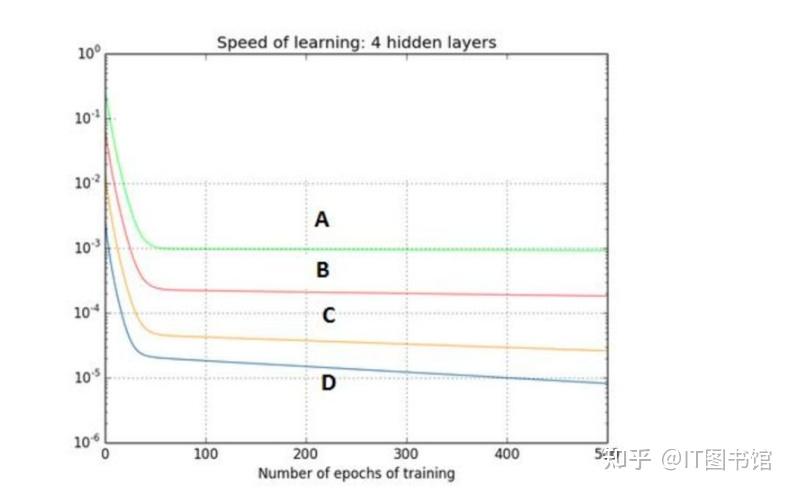
深度学习习题2
1.如果增加神经网络的宽度,精确度会增加到一个特定阈值后,便开始降低。造成这一现象的可能原因是什么? A、即使增加卷积核的数量,只有少部分的核会被用作预测 B、当卷积核数量增加时,神经网络的预测能力会降低 C、当卷…...

重启Eureka集群中的节点,对已经注册的服务有什么影响
先看答案,如果正确地操作,重启Eureka集群中的节点,对已经注册的服务影响非常小,甚至可以做到无感知。 但如果操作不当,可能会引发短暂的服务发现问题。 下面我们从Eureka的核心工作原理来详细分析这个问题。 Eureka的…...
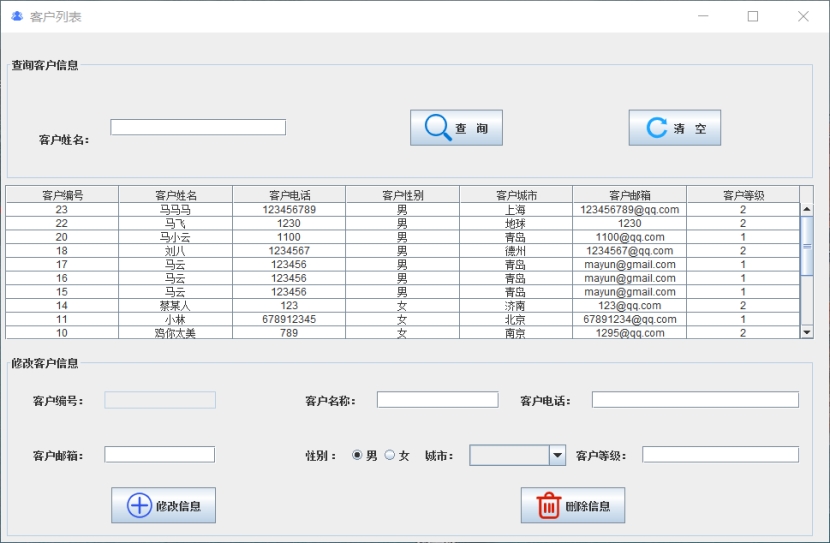
基于Java+MySQL实现(GUI)客户管理系统
客户资料管理系统的设计与实现 第一章 需求分析 1.1 需求总体介绍 本项目为了方便维护客户信息为了方便维护客户信息,对客户进行统一管理,可以把所有客户信息录入系统,进行维护和统计功能。可通过文件的方式保存相关录入数据,对…...