初学51单片机之PWM实例呼吸灯以及遇到的问题(已解答)
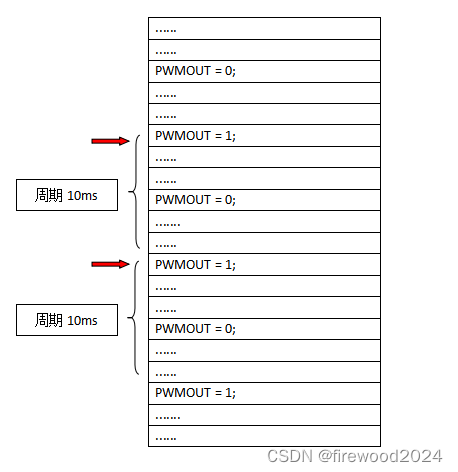
PWM全名Pulse Width Modulation中文称呼脉冲宽度调制 如图
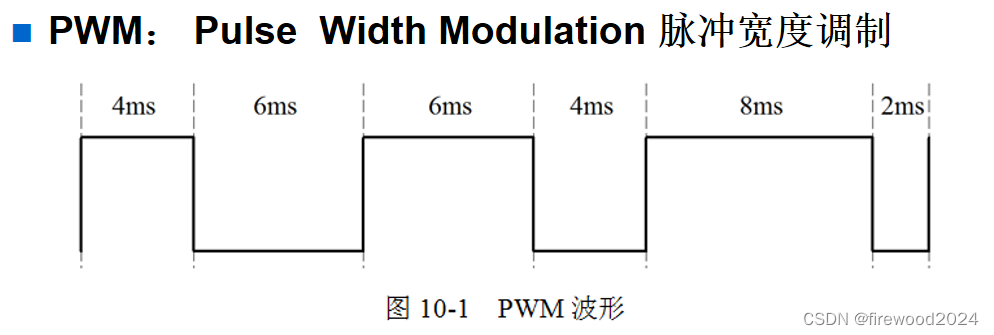
这是一个周期10ms、频率是100HZ的波形,但是每个周期内,高低电平宽度各不相同,这就是PWM的本质。
占空比是指高电平占整个周期的比列,上图第一个波形的占空比是40%,第二个是60%,第三个是80%。
本案将以PWM控制来制作一个呼吸灯,以及一个大致模拟人体呼吸的呼吸灯。
上代码
# include<reg52.h>sbit PWMOUT = P0^0;
sbit ADDR0 = P1^0;
sbit ADDR1 = P1^1;
sbit ADDR2 = P1^2;
sbit ADDR3 = P1^3;
sbit ENLED = P1^4;unsigned long PeriodCnt = 0; //PWM周期计数值
unsigned char HighRH = 0; //高电平重载值的高字节
unsigned char HighRL = 0; //高电平重载值的低字节
unsigned char LowRH = 0; //低电平重载值的高字节
unsigned char LowRL = 0; //低电平重载值的低字节
unsigned char T1RH = 0; //T1重载值的高字节
unsigned char T1RL = 0; //T1重载值的低字节void ConfigTimer1(unsigned int ms);
void ConfigPWM(unsigned int fr,unsigned char dc);void main()
{EA = 1; //开启中断ENLED = 0; //使能U3ADDR3 = 1;ADDR2 = 1; //使能LEDADDR1 = 1;ADDR0 = 0;ConfigPWM(100,10); //配置并启动PWMConfigTimer1(50); //用T1定时调整PWMwhile(1);
}/* 配置并启动T1,ms为定时时间 */
void ConfigTimer1(unsigned int ms)
{unsigned long tmp; //定义临时变量tmp = 11059200/12; //定时器计数频率tmp = (tmp * ms)/1000; //计算所需的计数值tmp = 65536 - tmp ; //计数定时器重载值tmp = tmp +12 ; //补偿中断响应延时造成的误差T1RH = (unsigned char)(tmp >> 8); //定时器重载值拆分高低字节T1RL = (unsigned char)tmp;TMOD &= 0x0F; //0000 1111 清零T1的控制位TMOD |= 0x10; //0001 0000 配置T1的模式为1TH1 = T1RH; //加载T1的重载值TL1 = T1RL; ET1 = 1; //使能T1中断TR1 = 1; //启动T1}/*配置并启动PWM,fr为频率,dc为占空比 */
void ConfigPWM(unsigned int fr , unsigned char dc)
{unsigned int high, low;PeriodCnt = (11059200/12) /fr; //计算一个周期所需的计数值high = (PeriodCnt * dc) /100; //计算高电平所学的计数值low = PeriodCnt - high; //计算低电平所需的计数值high = 65536 - high +12; //计算高电平的定时器重载值并补偿中断延时low = 65536 -low +12; //计算低电平的定时器重载值并补偿中断延时HighRH = (unsigned char)(high >> 8); //高电平重载值拆分高低电平HighRL = (unsigned char)high;LowRH = (unsigned char)(low >> 8); //低电平重载值拆分高低电平LowRL = (unsigned char)low;TMOD &= 0xF0; //清零T0的控制位TMOD |= 0x01; //配置T0为模式1TH0 = HighRH; //加载T0的重载值TL0 = HighRL;ET0 = 1; //使能T0中断TR0 = 1; //启动T0PWMOUT = 0; //输出高电平}/* 占空比调整函数,频率不变只调整占空比 */void AdjustDutyCycle(unsigned char dc)
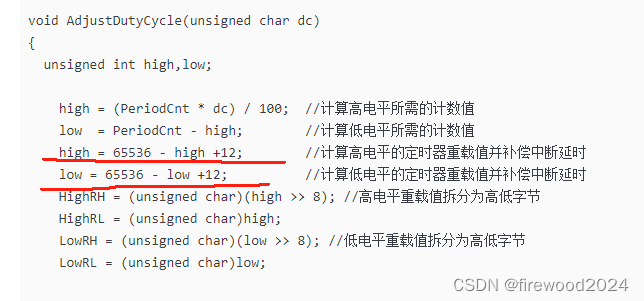
{unsigned int high,low;high = (PeriodCnt * dc) / 100; //计算高电平所需的计数值low = PeriodCnt - high; //计算低电平所需的计数值high = 65536 - high +12; //计算高电平的定时器重载值并补偿中断延时low = 65536 - low +12; //计算低电平的定时器重载值并补偿中断延时HighRH = (unsigned char)(high >> 8); //高电平重载值拆分为高低字节HighRL = (unsigned char)high;LowRH = (unsigned char)(low >> 8); //低电平重载值拆分为高低字节LowRL = (unsigned char)low;}/* T0中断服务函数,产生PWM输出 */
void interruptTimer0() interrupt 1
{if(PWMOUT == 1) //当输出位高电平时,装载低电平值并输出低电平{TH0 = LowRH;TL0 = LowRL;PWMOUT = 0;}else //当输出为低电平时,装载高电平值并输出高电平{TH0 = HighRH;TL0 = HighRL;PWMOUT = 1;}}/* T1中断服务函数,定时动态调整占空比 */void interruptTimer1() interrupt 3
{static bit dir = 0;static unsigned char index = 0;unsigned char code table[13] = {5,18,30,41,51,60,68,75,81,86,90,93,95 //占空比调整};TH1 = T1RH;TL1 = T1RL;AdjustDutyCycle(table[index]); //调整PWM的占空比if(dir == 0) //逐步增大占空比{index++;if(index >= 12) {dir = 1;}}else //减少占空比{index--;if(index == 0){dir = 0;}}
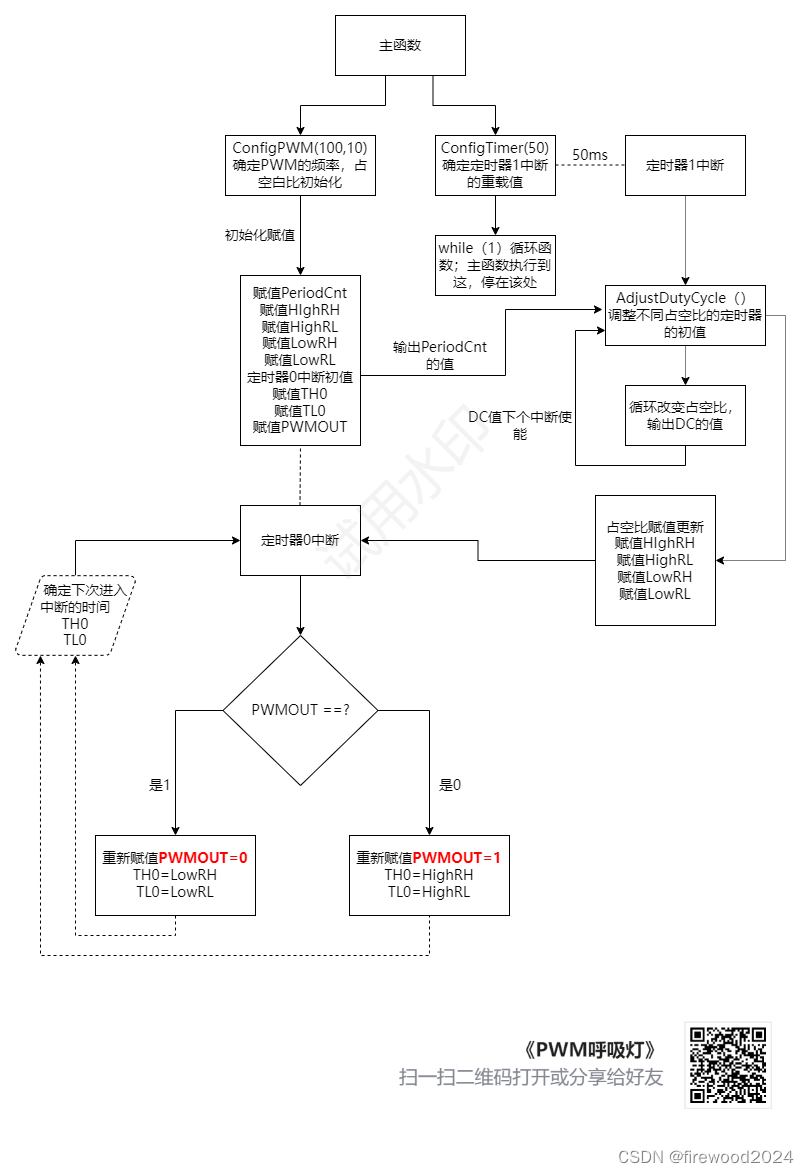
}看结果视频:这是一个频率比较快的呼吸灯,提供下逻辑导图。
呼吸灯_哔哩哔哩_bilibili
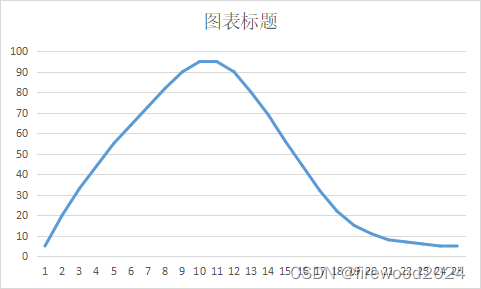
笔者用它的占空比数组做了一个曲线图,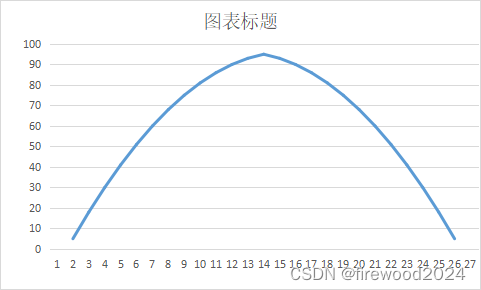
竖轴是占空比,横轴是时间。
上篇博文数字秒表,笔者已经计算过类似的时间补偿。本案也演算一次
首先这个时间循环可以看着是这样如下图,无论占空比如何改变频率都是100HZ即10ms
上次博文笔者求解了数字秒表的误差,这次在求解呼吸灯的时候遇到了一些问题,而且这些问题目前不知如何解决;
第一个是函数赋值出错的问题:对于函数 ConfigPWM(unsigned int fr , unsigned char dc)
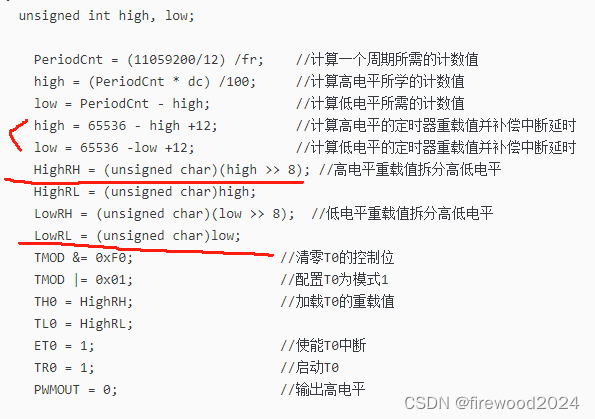 当运行到
当运行到
HighRH = (unsigned char)(high >> 8); 变量high 与low的值应该都已经赋值完毕,而且赋值完的结果应该是是high =FC73 low=DFA5。但是笔者debug的结果是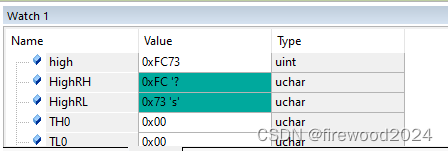
可以看到high的值没有问题,高低电平拆分,从新赋值也没问题。
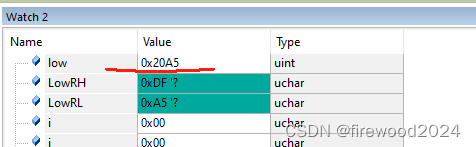
但是Low出问题了,Low的值竟然是0x20A5,拆分后的赋值又是正确的,那么这里到底是哪里出了问题?为什么High值没有问题,low值却有问题呢 ?它们两的计算过程都一样,这是一处问题。
第二个问题已经解决了:
刚才没考虑到PWMOUT是单片机P0^0端口,不是单纯的变量,因此在debug的时候是无法按照变量的方式是去考虑的,把PWMOUT改成变量就可以进入if函数了。刚吃完饭灵光一线。
第二:在debug时间误差的时候笔者发现,定时器0中断,程序指针一直无法进入if函数,直接进入了else函数,导致中断时间间隔一直都是1ms,看视频 keil5Debug过程异常_哔哩哔哩_bilibili
可以看到debug过程中无法进入定时器0中断的if函数,但是如果你注释掉if函数了的关键语句PWMOUT = 0;它就不会工作,显然if函数是起作用的,事实上笔者后续按了好久的F5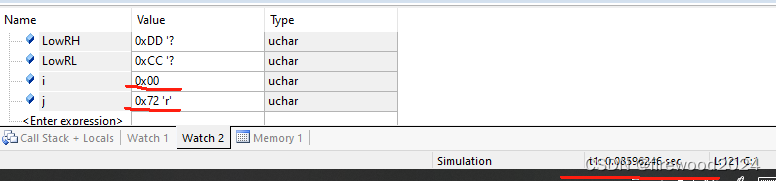 j都已经72了,时间都到85ms了,i还是0。85ms定时器1中断都进入一次了,很快就要进入第二次了,if函数还是没进入一次,这显然不符合程序逻辑 的。事实上主函数第一次执行 ConfigPWM()的时候,把PWMOUT赋值为1,是可以进入一次if函数的,然后会经过9ms的等待再次进入中断进入else()函数,从此后就再也无法进入if函数了,后续现象和视频一样。
j都已经72了,时间都到85ms了,i还是0。85ms定时器1中断都进入一次了,很快就要进入第二次了,if函数还是没进入一次,这显然不符合程序逻辑 的。事实上主函数第一次执行 ConfigPWM()的时候,把PWMOUT赋值为1,是可以进入一次if函数的,然后会经过9ms的等待再次进入中断进入else()函数,从此后就再也无法进入if函数了,后续现象和视频一样。
这个问题产生的缘由笔者不清楚,如果有读者小伙伴知道原因,请留下言。笔者多多感谢。如果有keil软件的话,可以复制过去,debug一下,看是否和笔者的结论一样。事实上笔者用keil4也试了,结果也一样。
然后笔者想既然已经实现一个呼吸灯功能了,那么用呼吸灯模拟下人正常呼吸的频率。
根据笔者自己的体验吸气要2s,呼气要3s。一个周期是5s。然后是呼吸曲线图。
本案的LED的是低电平使能,因此曲线图最高点占空比95,应是它的反向占空比即5%。这个数组是
unsigned char code tableup[10] = { //吸气数组2s
95,80,67,56,45,36,27,18,10,5
};
unsigned char code tabledown[17] = { //呼气数组3s多一点
5,10,20,31,44,56,68,78,85,89,92,93,94,95,95,95,95
};
上代码
# include<reg52.h>sbit PWMOUT = P0^0;
sbit ADDR0 = P1^0;
sbit ADDR1 = P1^1;
sbit ADDR2 = P1^2;
sbit ADDR3 = P1^3;
sbit ENLED = P1^4;unsigned long PeriodCnt = 0; //PWM周期计数值
unsigned char HighRH = 0; //高电平重载值的高字节
unsigned char HighRL = 0; //高电平重载值的低字节
unsigned char LowRH = 0; //低电平重载值的高字节
unsigned char LowRL = 0; //低电平重载值的低字节
unsigned char T1RH = 0; //T1重载值的高字节
unsigned char T1RL = 0; //T1重载值的低字节void ConfigTimer1(unsigned int ms);
void ConfigPWM(unsigned int fr,unsigned char dc);void main()
{EA = 1; //开启中断ENLED = 0; //使能U3ADDR3 = 1;ADDR2 = 1; //使能LEDADDR1 = 1;ADDR0 = 0;ConfigPWM(100,95); //配置并启动PWMConfigTimer1(50); //用T1定时调整PWMwhile(1);
}/* 配置并启动T1,ms为定时时间 */
void ConfigTimer1(unsigned int ms)
{unsigned long tmp; //定义临时变量tmp = 11059200/12; //定时器计数频率tmp = (tmp * ms)/1000; //计算所需的计数值tmp = 65536 - tmp ; //计数定时器重载值tmp = tmp +12 ; //补偿中断响应延时造成的误差T1RH = (unsigned char)(tmp >> 8); //定时器重载值拆分高低字节T1RL = (unsigned char)tmp;TMOD &= 0x0F; //0000 1111 清零T1的控制位TMOD |= 0x10; //0001 0000 配置T1的模式为1TH1 = T1RH; //加载T1的重载值TL1 = T1RL; ET1 = 1; //使能T1中断TR1 = 1; //启动T1}/*配置并启动PWM,fr为频率,dc为占空比 */
void ConfigPWM(unsigned int fr , unsigned char dc)
{unsigned int high, low;PeriodCnt = (11059200/12) /fr; //计算一个周期所需的计数值high = (PeriodCnt * dc) /100; //计算高电平所学的计数值low = PeriodCnt - high; //计算低电平所需的计数值high = 65536 - high +12; //计算高电平的定时器重载值并补偿中断延时low = 65536 -low +12; //计算低电平的定时器重载值并补偿中断延时HighRH = (unsigned char)(high >> 8); //高电平重载值拆分高低电平HighRL = (unsigned char)high;LowRH = (unsigned char)(low >> 8); //低电平重载值拆分高低电平LowRL = (unsigned char)low;TMOD &= 0xF0; //清零T0的控制位TMOD |= 0x01; //配置T0为模式1TH0 = HighRH; //加载T0的重载值TL0 = HighRL;ET0 = 1; //使能T0中断TR0 = 1; //启动T0PWMOUT = 1; //输出高电平}/* 占空比调整函数,频率不变只调整占空比 */void AdjustDutyCycle(unsigned char dc)
{unsigned int high,low;high = (PeriodCnt * dc) / 100; //计算高电平所需的计数值low = PeriodCnt - high; //计算低电平所需的计数值high = 65536 - high +12; //计算高电平的定时器重载值并补偿中断延时low = 65536 - low +12; //计算低电平的定时器重载值并补偿中断延时HighRH = (unsigned char)(high >> 8); //高电平重载值拆分为高低字节HighRL = (unsigned char)high;LowRH = (unsigned char)(low >> 8); //低电平重载值拆分为高低字节LowRL = (unsigned char)low;}/* T0中断服务函数,产生PWM输出 */
void interruptTimer0() interrupt 1
{if(PWMOUT == 1) //当输出位高电平时,装载低电平值并输出低电平{TH0 = LowRH;TL0 = LowRL;PWMOUT = 0;}else //当输出为低电平时,装载高电平值并输出高电平{TH0 = HighRH;TL0 = HighRL;PWMOUT = 1;}}/* T1中断服务函数,定时动态调整占空比 */void interruptTimer1() interrupt 3
{static bit dir = 0;static unsigned char index = 0;static unsigned char index2 = 0;static char cnt = 0;//unsigned char code tableup[10] = {// 5,20,33,44,55,64,73,82,90,95 //占空比调整//};unsigned char code tableup[10] = { //吸气数组95,80,67,56,45,36,27,18,10,5};//unsigned char code tabledown[15] = {// 95,90,80,69,56,44,32,22,15,11,8,7,6,5,5//};unsigned char code tabledown[17] = { //呼气数组5,10,20,31,44,56,68,78,85,89,92,93,94,95,95,95,95};TH1 = T1RH;TL1 = T1RL;cnt++;if(cnt >= 4){cnt = 0; if(dir == 0) {AdjustDutyCycle(tableup[index]); //吸气2sindex++;if(index >= 10) {dir = 1;index = 0;}}else {AdjustDutyCycle(tabledown[index2]); //呼气3sindex2++;if(index2 >= 17){dir = 0;index2 = 0;}}}}看下结果:模拟人体呼吸灯2_哔哩哔哩_bilibili
总结:不知道是keil5软件本身有问题,还是笔者的keil5软件有问题,还是笔者哪里没有考虑到,路过的小伙伴如果知道缘由,请多多留言,指点下笔者,笔者在此多多感谢。
再和初学的小伙伴分享一个关于定时器运行的相关问题。定时器计时相关_哔哩哔哩_bilibili
相关文章:
初学51单片机之PWM实例呼吸灯以及遇到的问题(已解答)
PWM全名Pulse Width Modulation中文称呼脉冲宽度调制 如图 这是一个周期10ms、频率是100HZ的波形,但是每个周期内,高低电平宽度各不相同,这就是PWM的本质。 占空比是指高电平占整个周期的比列,上图第一个波形的占空比是40%,第二个…...
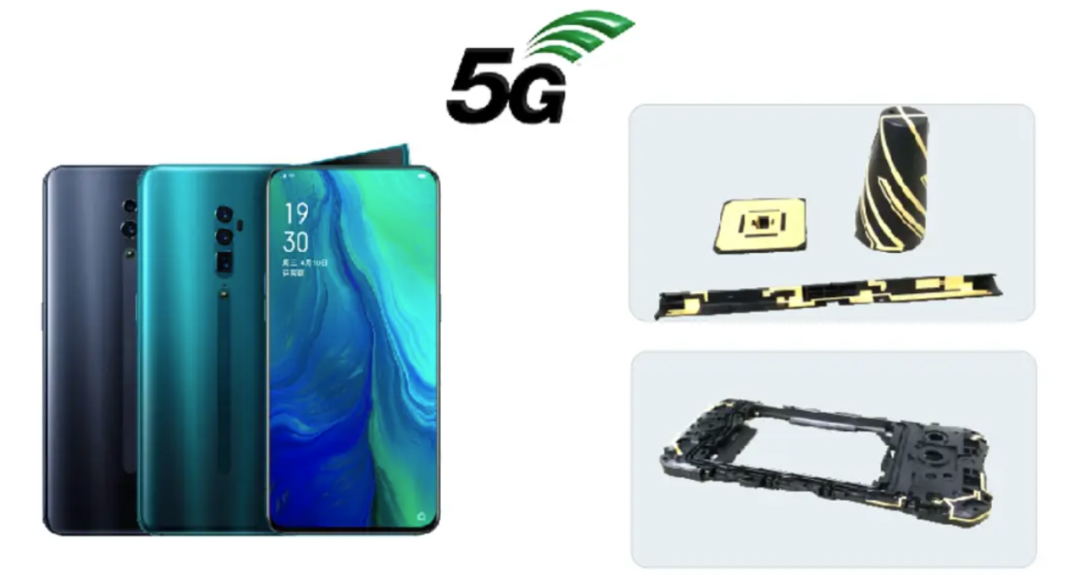
手机天线都去哪里了?
在手机的演变历程中,天线的设计和位置一直是工程师们不断探索和创新的领域。你是否好奇,现在的手机为什么看不到那些曾经显眼的天线了呢? 让我们一起揭开这个谜题。 首先,让我们从基础开始:手机是如何发出电磁波的&…...
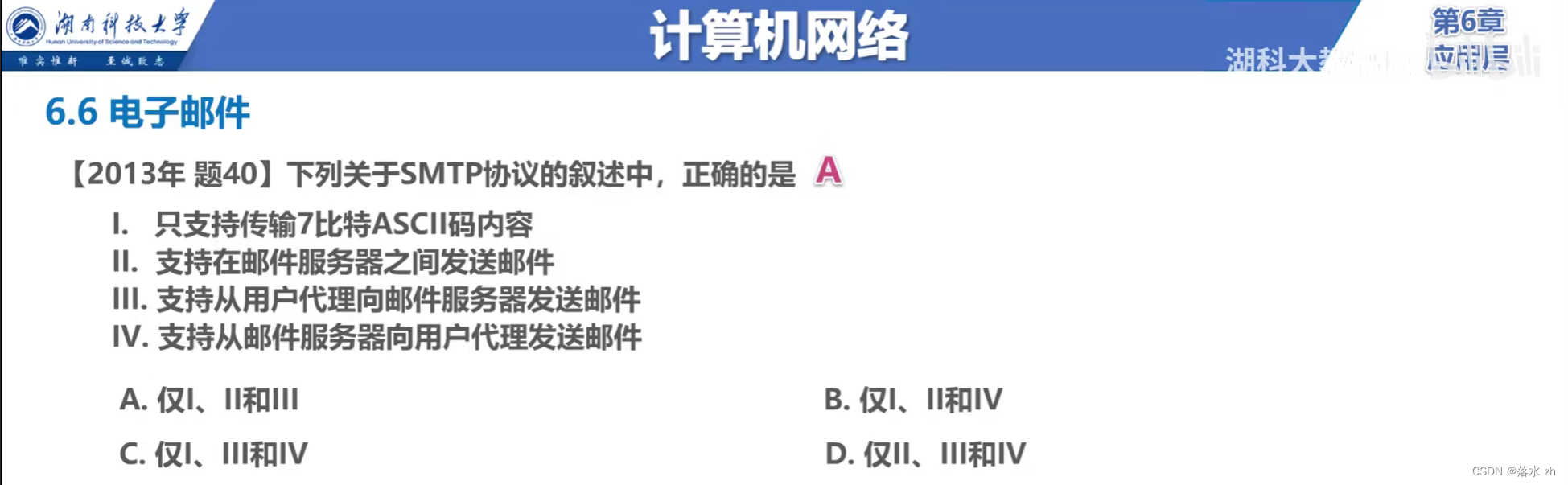
计算机网络 —— 应用层(电子邮件)
计算机网络 —— 应用层(电子邮件) 电子邮件发送电子邮件的过程SMTP特性工作流程 电子邮件格式MIME关键组件工作方式 POP/IMAPPOP(邮局协议)IMAP(因特网邮件访问协议) 基于万维网的电子邮箱特点优势常见的基…...
)
Java18新特性(极简)
一、引言 自1995年Java语言首次亮相以来,它已经成为企业级应用、移动应用和游戏开发等领域不可或缺的一部分。随着技术的不断进步,Java也在持续演化,每个新版本都带来了诸多新特性和性能优化,旨在提升开发者的编程效率和应用程序的…...

vscode连接ssh远程服务器
当使用Visual Studio Code (VSCode) 连接SSH远程服务器时,可以遵循以下步骤。这些步骤将帮助你设置并连接到远程服务器,包括免密登录的设置(如果需要)。 一、安装并配置Remote-SSH插件 下载并安装VSCode:确保你已经下…...

【趣味测试】
编程过程中遇到的趣味知识 1 Cpp 1.1 浮点数计算 if (0.1 0.2 0.3) {std::cout << "0.1 0.2 0.3 true" << std::endl;} else {std::cout << "0.1 0.2 0.3 false" << std::endl;}if (0.1 0.3 0.4) {std::cout << &…...

数据结构经典面试之数组——C#和C++篇
文章目录 1. 数组的基本概念与功能2. C#数组创建数组访问数组元素修改数组元素数组排序 3. C数组创建数组访问数组元素修改数组元素数组排序 4. 数组的实际应用与性能优化5. C#数组示例6. C数组示例总结 数组是编程中常用的数据结构之一,它用于存储一系列相同类型的…...

docker的基本知识
文章目录 前言docker的基本知识1. docker 的底层逻辑2. docker 的核心要素2.1. 镜像的基本概念:2.2. 容器的基本概念:2.3. 仓库的基本概念: 前言 如果您觉得有用的话,记得给博主点个赞,评论,收藏一键三连啊,写作不易啊^ _ ^。 …...

React Native性能优化红宝书
一、React Native介绍 React Native 是Facebook在React.js Conf2015 推出的开源框架,使用React和应用平台的原生功能来构建 Android 和 iOS 应用。通过 React Native,可以使用 JavaScript 来访问移动平台的 API,使用 React 组件来描述 UI 的…...
后端不提供文件流接口,前台js使用a标签实现当前表格数据(数组非blob数据)下载成Excel
前言:开发过程中遇到的一些业务场景,如果第三方不让使用,后端不提供接口,就只能拿到table数据(Array),实现excel文件下载。 废话不多说,直接上代码,方法后续自行封装即可: functio…...
如何使用ChatGPT辅助设计工作
文章目录 设计师如何使用ChatGPT提升工作效率?25个案例告诉你!什么是 prompt?咨询信息型 prompt vs 执行任务 prompt编写出色 prompt 的基本思路撰写 prompt 的案例和技巧1、将 ChatGPT 视作专业人士2、使用 ChatGPT 创建表单3、使用 ChatGPT…...
hadoop服务器启动后无法执行hdfs dfs命令
集群启动后,无法正常使用hdfs的任何命令。使用jps查看进程,发现namenode没有启动,然后再进入到Hadoop的相应目录,打开里面的logs文件 打开Hadoop的master的log 再使用vi编辑器查看(也可以用less或者more命令查看&#…...
Flink 1.19.1 standalone 集群模式部署及配置
flink 1.19起 conf/flink-conf.yaml 更改为新的 conf/config.yaml standalone集群: dev001、dev002、dev003 config.yaml: jobmanager address 统一使用 dev001,bind-port 统一改成 0.0.0.0,taskmanager address 分别更改为dev所在host dev001 config.…...
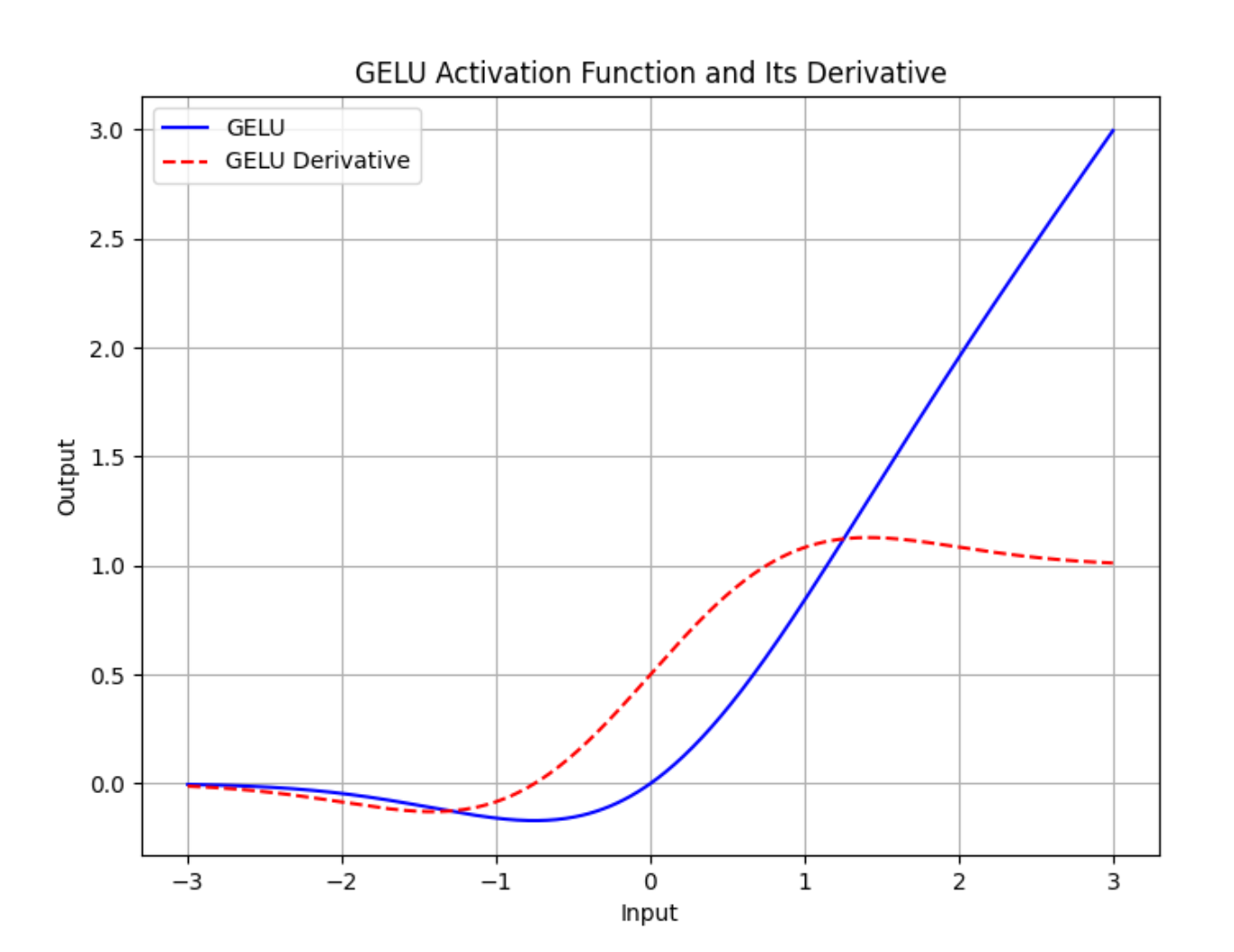
【深度学习】GELU激活函数是什么?
torch.nn.GELU 模块在 PyTorch 中实现了高斯误差线性单元(GELU)激活函数。GELU 被用于许多深度学习模型中,包括Transformer,因为它相比传统的 ReLU(整流线性单元)函数能够更好地近似神经元的真实激活行为。…...

如何编译和运行您的第一个Java程序
如何编译和运行您的第一个Java程序 让我们从一个简单的java程序开始。 简单的Java程序 这是一个非常基本的java程序,它会打印一条消息“这是我在java中的第一个程序”。 public class FirstJavaProgram {public static void main(String[] args){System.…...

vscode用vue框架写一个登陆页面
目录 一、创建登录页面 二、构建好登陆页面的路由 三、编写登录页代码 1.添加基础结构 2.给登录页添加背景 3.解决填充不满问题 4.我们把背景的红颜色替换成背景图: 5.在页面中央添加一个卡片来显示登录页面 6.设置中间卡片页面的左侧 7.设置右侧的样式及…...
腾讯云API安全保障措施?有哪些调用限制?
腾讯云API的调用效率如何优化?怎么使用API接口发信? 腾讯云API作为腾讯云提供的核心服务之一,广泛应用于各行各业。然而,随着API应用的普及,API安全问题也日益突出。AokSend将详细探讨腾讯云API的安全保障措施&#x…...

在建设工程合同争议案件中,如何来认定“竣工验收”?
在建设工程合同争议案件中,如何来认定“竣工验收”? 建设工程的最终竣工验收,既涉及在建设单位组织下的五方单位验收,又需政府质量管理部门的监督验收以及竣工验收备案,工程档案还需递交工程所在地的工程档案馆归档。…...
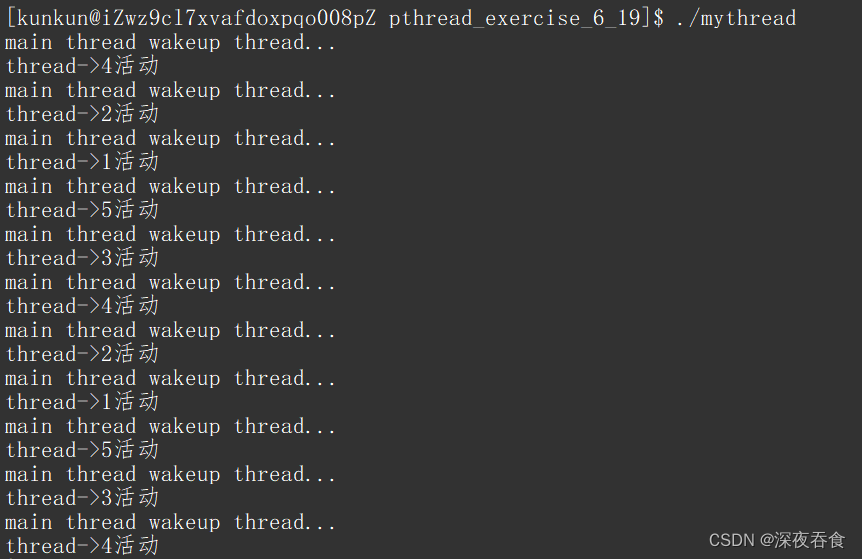
Linux:多线程中的互斥与同步
多线程 线程互斥互斥锁互斥锁实现的原理封装原生线程库封装互斥锁 死锁避免死锁的四种方法 线程同步条件变量 线程互斥 在多线程中,如果存在有一个全局变量,那么这个全局变量会被所有执行流所共享。但是,资源共享就会存在一种问题࿱…...

数据仓库之主题域
数据仓库的主题域(Subject Area)是按照特定业务领域或主题对数据进行分类和组织的方式。每个主题域集中反映一个特定的业务方面,使得数据分析和查询更加清晰和高效。主题域通常与企业的关键业务过程相关,能够帮助用户在数据仓库中…...

Sqoop1 vs Sqoop2:架构之争与选型指南
Sqoop1 vs Sqoop2:架构之争与选型指南1. 引言:两个版本,一个困惑2. 核心差异:从架构到功能的全面对比2.1 架构对比:客户端 vs 客户端-服务器2.2 功能特性详细对比2.3 安全性对比:Sqoop2的核心优势3. 为什么…...

SpringBoot 3.2.0 项目里整合 Flowable 7.1.0,我踩过的那些坑和最佳实践
SpringBoot 3.2.0 项目里整合 Flowable 7.1.0,我踩过的那些坑和最佳实践 最近在重构公司内部的工作流系统时,我决定采用 SpringBoot 3.2.0 和 Flowable 7.1.0 的组合。本以为只是简单的依赖引入和配置,没想到从 POM 文件开始就踩了不少坑。这…...
)
当NB-IoT遇上同步轨道卫星:GEO场景下的定时关系增强全指南(基于3GPP Release 17最新规范)
GEO卫星场景下NB-IoT定时关系增强技术解析 1. GEO卫星通信与NB-IoT的技术融合挑战 地球静止轨道(GEO)卫星通信与窄带物联网(NB-IoT)技术的结合,为全球物联网覆盖提供了革命性解决方案。GEO卫星位于地球赤道上空35,786公…...

7_Harness驾驭工程安全与成本层:DevSecOps与云成本优化
7_Harness驾驭工程安全与成本层:DevSecOps与云成本优化 关键字: DevSecOps、安全测试编排、STO、SAST、DAST、SCA、OPA策略、策略即代码、Rego、软件供应链安全、SBOM、依赖追溯、云成本管理、CCM、FinOps、资源浪费识别、预算告警、RBAC、审计日志、单位…...

Keil5主题配色进阶:不只是好看,更要好用!详解如何区分函数、变量、宏定义的颜色
Keil5主题配色进阶:不只是好看,更要好用!详解如何区分函数、变量、宏定义的颜色 作为一名嵌入式开发者,每天面对Keil5的默认编辑器界面,你是否也感到视觉疲劳?那些单调的配色不仅影响编码心情,更…...

如何用PPI网络community分析发现潜在药物靶点?微生信可视化保姆教程
从PPI网络到药物靶点:基于Community分析的生物标记物发现全流程 在生物医学研究的浩瀚海洋中,蛋白质-蛋白质相互作用(PPI)网络犹如一张精密的城市交通图,而community分析则帮助我们识别出其中的"功能街区"。想象一下,当…...

5分钟搞定OpenClaw+nanobot:超轻量级AI助手一键部署指南
5分钟搞定OpenClawnanobot:超轻量级AI助手一键部署指南 1. 为什么选择OpenClawnanobot组合 上周我在整理电脑上的项目文档时,突然意识到自己每天要重复执行大量机械操作:查找文件、转换格式、汇总数据。作为独立开发者,这些琐事…...

OpenClaw进阶:利用GLM-4.7-Flash实现复杂任务链式执行
OpenClaw进阶:利用GLM-4.7-Flash实现复杂任务链式执行 1. 为什么需要链式任务执行 上周我在整理项目文档时,遇到了一个典型的多步骤任务:需要从十几个Markdown文件中提取关键数据,整理成Excel表格,然后根据内容生成分…...

清华学位论文高效排版:thuthesis一站式规范生成解决方案
清华学位论文高效排版:thuthesis一站式规范生成解决方案 【免费下载链接】thuthesis LaTeX Thesis Template for Tsinghua University 项目地址: https://gitcode.com/gh_mirrors/th/thuthesis 🎯 价值定位:为什么选择thuthesis模板&a…...

小型电商自动化:OpenClaw+nanobot处理订单邮件
小型电商自动化:OpenClawnanobot处理订单邮件 1. 为什么选择OpenClaw处理电商订单 作为一个经营小型电商的个体商户,我每天要处理几十封来自Gmail的订单邮件。这些邮件包含客户信息、商品清单和收货地址,需要手动录入到库存表格、生成物流单…...