自动驾驶仿真:Carsim转向传动比设置
文章目录
- 一、转向传动比概念
- 二、设置转向传动比
- 1、C factor概念
- 2、Steer Kinematics概念
- 3、传动比计算公式
- 三、转向传动比验证
一、转向传动比概念
转向传动比(Steering Ratio)表示方向盘转动角度与车轮转动角度之间的关系。公式如下:
转向传动比 = 方向盘转动角度 车轮转动角度 \text{转向传动比} = \frac{\text{方向盘转动角度}}{\text{车轮转动角度}} 转向传动比=车轮转动角度方向盘转动角度
例如,假设方向盘转动 360 度,而车轮转动 30 度,那么转向传动比为:
转向传动比 = 36 0 ∘ 3 0 ∘ = 12 : 1 \text{转向传动比} = \frac{360^\circ}{30^\circ} = 12:1 转向传动比=30∘360∘=12:1
二、设置转向传动比
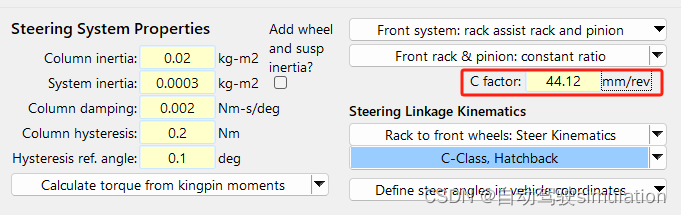
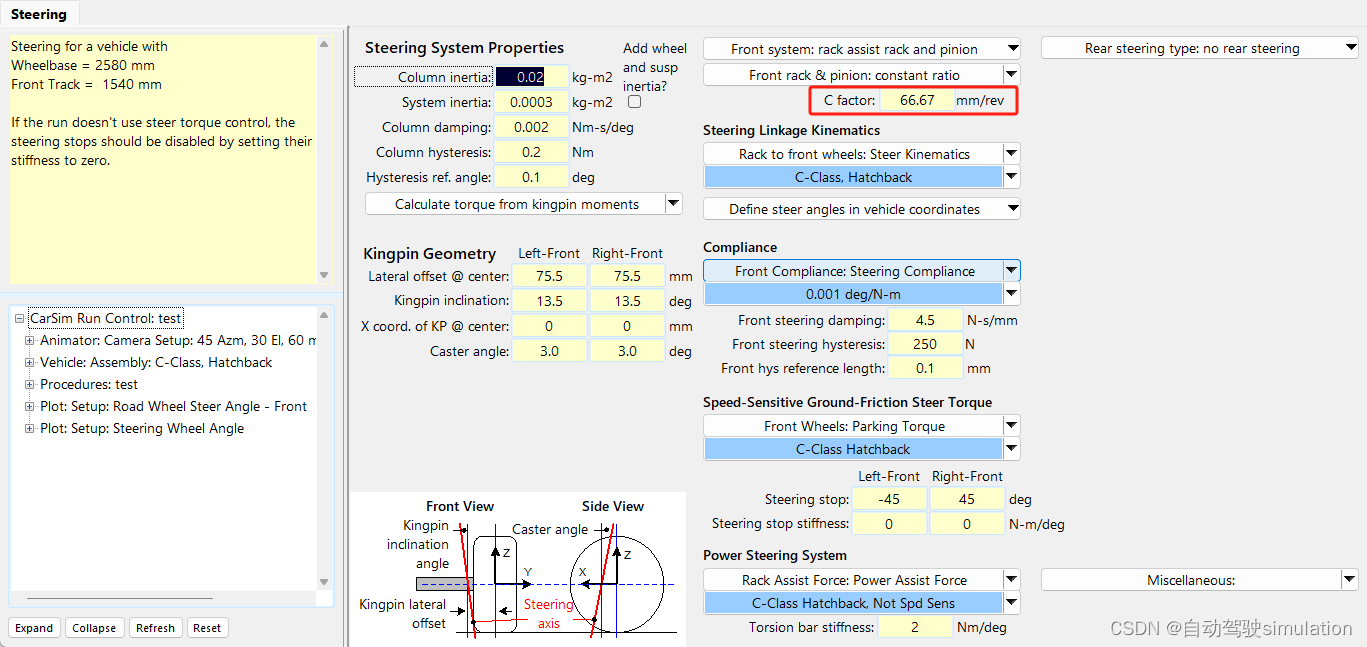
1、C factor概念
C factor : 方向盘转一圈齿条移动的位移 \text{C factor} : {\text{方向盘转一圈齿条移动的位移}} C factor:方向盘转一圈齿条移动的位移
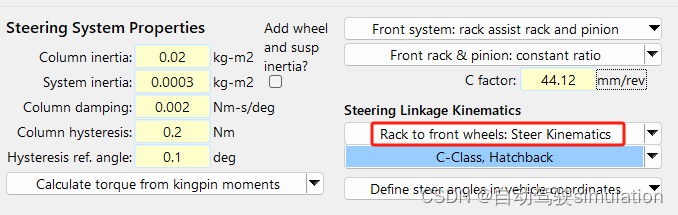
2、Steer Kinematics概念
Rack to front wheels: Steer Kinematics : 齿条位移和前轮转角之间的关系 \text{Rack to front wheels: Steer Kinematics} : {\text{齿条位移和前轮转角之间的关系}} Rack to front wheels: Steer Kinematics:齿条位移和前轮转角之间的关系
3、传动比计算公式
1)由于Carsim中没有直接设置转向传动比的关系,在Carsim中计算传动比的关系式如下:
转向传动比 = 1 / ( (C factor / 360) ∗ Steer Kinematics ) \text{转向传动比} = 1 / ({\text{(C factor / 360)}}*{\text{Steer Kinematics}}) 转向传动比=1/((C factor / 360)∗Steer Kinematics)
注意:这里需要c factor / 360,因为要将rev转换成deg;
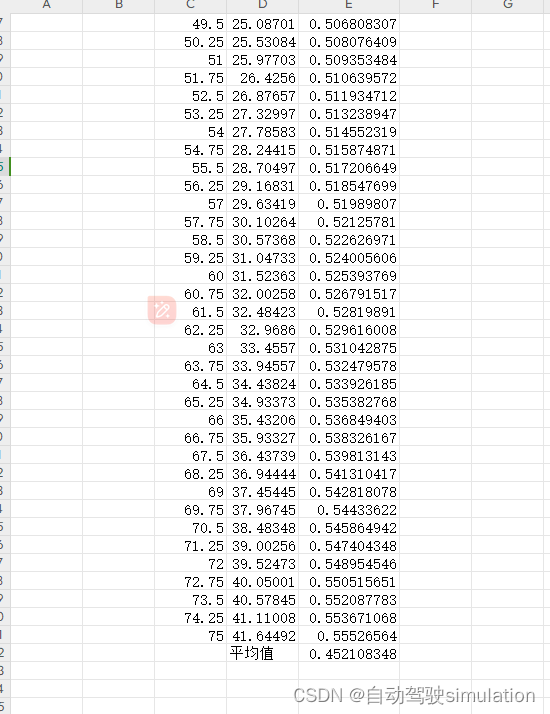
2)假设取左前轮斜率的平均值,得Steer Kinematics(平均) = 0.45 (deg/mm);
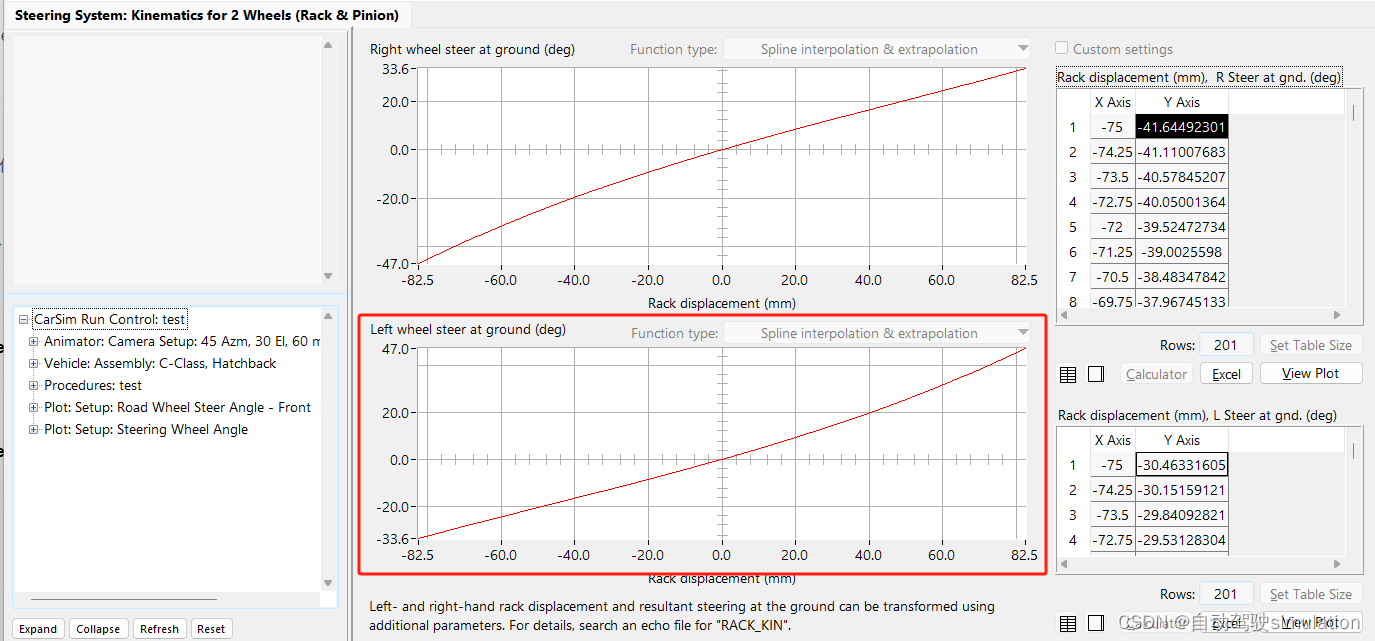
计算Steer Kinematics平均值:
3)假设你需要的传动比是12,推导得:
转向传动比 = 1 / ( (C factor / 360) ∗ Steer Kinematics ) \text{转向传动比} =1 / ({\text{(C factor / 360)}}*{\text{Steer Kinematics}}) 转向传动比=1/((C factor / 360)∗Steer Kinematics)
得:
12 = 1 / ( (C factor / 360) ∗ Steer Kinematics ) \text{12} =1 / ({\text{(C factor / 360)}}*{\text{Steer Kinematics}}) 12=1/((C factor / 360)∗Steer Kinematics)
得:
12 = 1 / ( (C factor / 360) ∗ 0.452 ) 得 : C f a c t o r ≈ 66.67 ( m m / r e v ) \text{12} =1 / ({\text{(C factor / 360)}}*{\text{0.452}}) 得 : C factor ≈ 66.67(mm/rev) 12=1/((C factor / 360)∗0.452)得:Cfactor≈66.67(mm/rev)
三、转向传动比验证
1、由上述可得传动比为12的时候,C factor为66.67(mm/rev),代入carsim:
2、设置方向盘输出角度为120deg,由于12 = 传动比 = 方向盘角度 / 前轮转角,因此前轮转角大概为10deg左右;
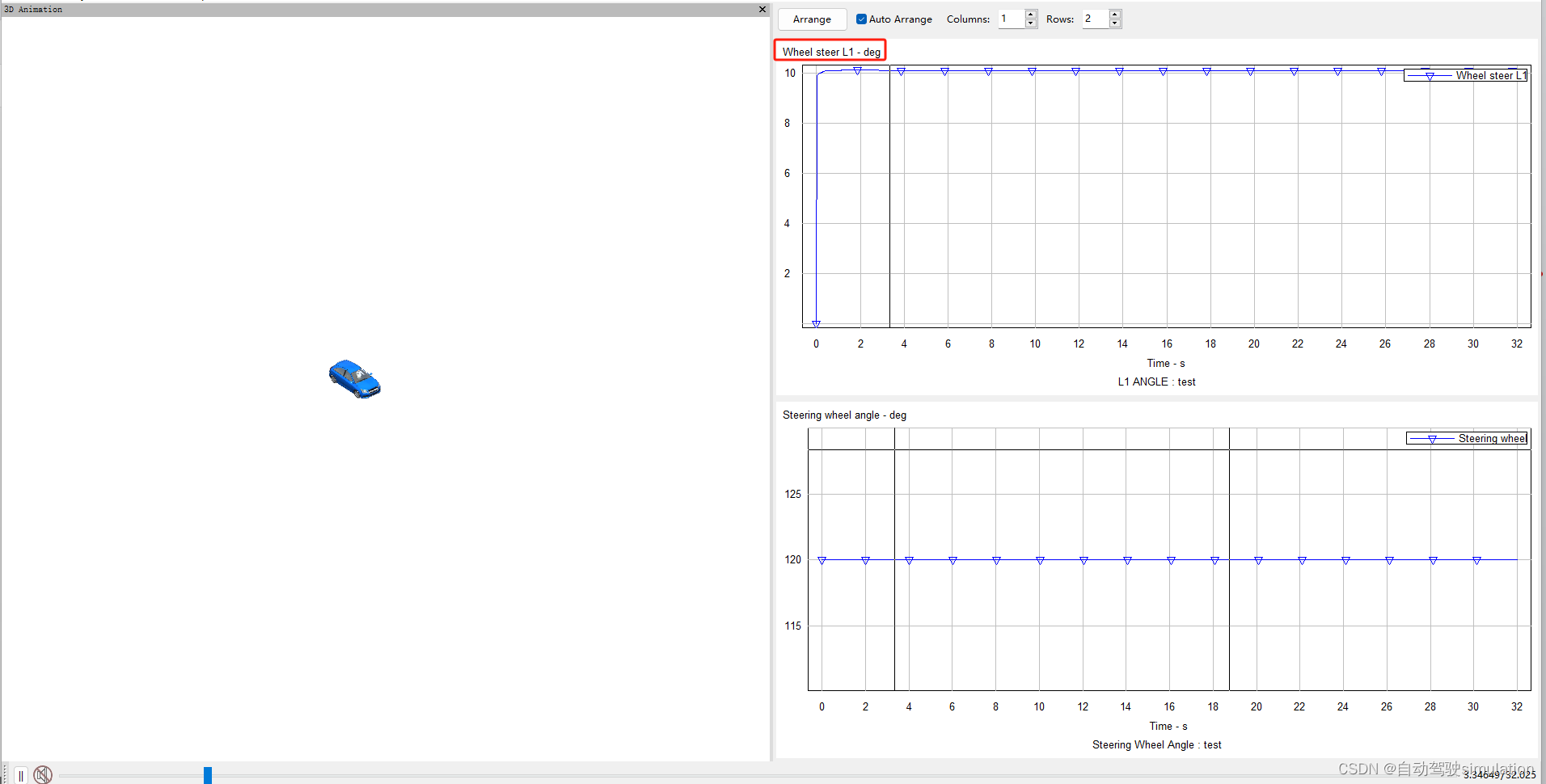
曲线结果符合预期,因此公式正确;
相关文章:
自动驾驶仿真:Carsim转向传动比设置
文章目录 一、转向传动比概念二、设置转向传动比1、C factor概念2、Steer Kinematics概念3、传动比计算公式 三、转向传动比验证 一、转向传动比概念 转向传动比(Steering Ratio)表示方向盘转动角度与车轮转动角度之间的关系。公式如下: 转向…...
 交叉熵损失函数详解和要点提醒)
PyTorch nn.CrossEntropyLoss() 交叉熵损失函数详解和要点提醒
文章目录 前置知识nn.CrossEntropyLoss() 交叉熵损失参数数学公式带权重的公式(weight)标签平滑(label_smoothing) 要点 附录参考链接 前置知识 深度学习:关于损失函数的一些前置知识(PyTorch Loss&#x…...

DW学习笔记|数学建模task2
本章主要涉及到的知识点有: 微分方程的解法如何用 Python 解微分方程偏微分方程及其求解方法微分方程的基本案例差分方程的求解数值计算方法元胞自动机 2.1 微分方程的理论基础 微分方程是什么?如果你参加过高考,可能在高三备考中遇到过这…...
【大数据 复习】第9章 数据仓库分析工具Hive
一、概念 1.概述 (1)Hive是一个构建于Hadoop顶层的数据仓库工具。 (2)某种程度上可以看作是用户编程接口,本身不存储和处理数据。 (3)依赖分布式文件系统HDFS存储数据。 (4…...
ionic7 从安装 到 项目启动最后打包成 apk
报错处理 在打包的时候遇到过几个问题,这里记录下来两个 Visual Studio Code运行ionic build出错显示ionic : 无法加载文件 ionic 项目通过 android studio 打开报错 capacitor.settings.gradle 文件不存在 说明 由于之前使用的是 ionic 3,当时打包的…...
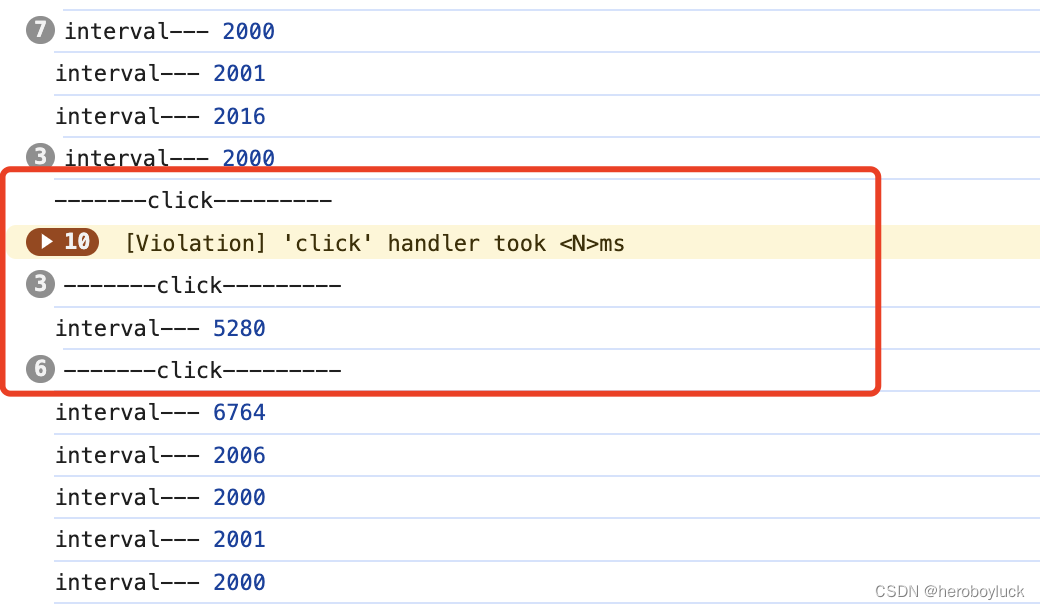
setInterval 定时任务执行时间不准验证
一般在处理定时任务的时候都使用setInterval间隔定时调用任务。 setInterval(() > {console.log("interval"); }, 2 * 1000);我们定义的是两秒执行一次,但是浏览器实际执行的间隔时间只多不少。这是由于浏览器执行 JS 是单线程模式,使用se…...

Stable Diffusion Model网站
Civitai Models | Discover Free Stable Diffusion Modelshttps://www.tjsky.net/tutorial/488https://zhuanlan.zhihu.com/p/610298913超详细的 Stable Diffusion ComfyUI 基础教程(一):安装与常用插件 - 优设网 - 学设计上优设 (uisdc.com)…...
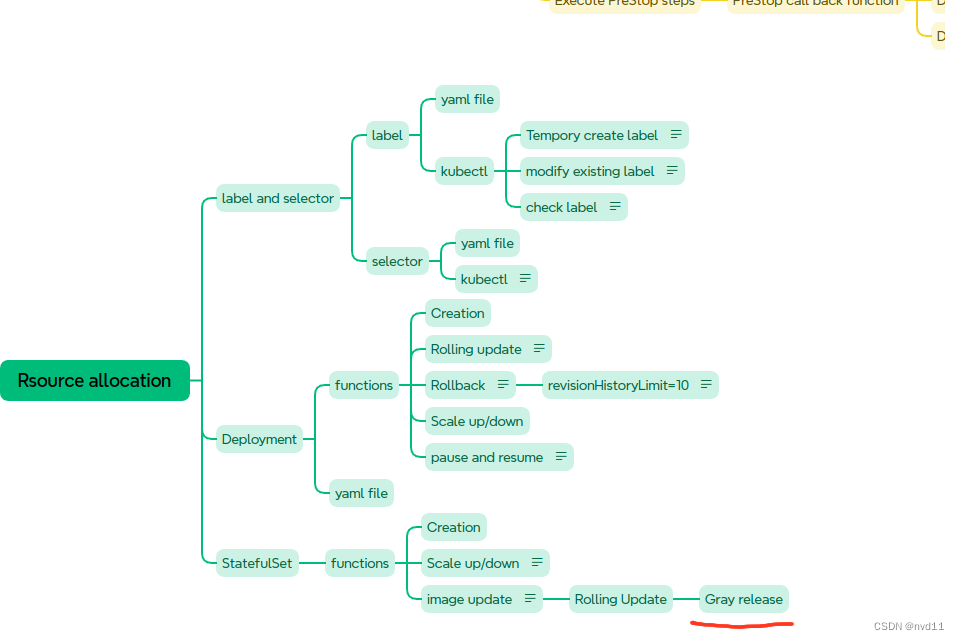
K8S - 实现statefulset 有状态service的灰度发布
什么是灰度发布 Canary Release 参考 理解 什么是 滚动更新,蓝绿部署,灰度发布 以及它们的区别 配置partition in updateStrategy/rollingUpdate 这次我为修改了 statefulset 的1个yaml file statefulsets/stateful-nginx-without-pvc.yaml: --- apiVe…...

Qt 技术博客:深入理解 Qt 中的 delete 和 deleteLater 与信号槽机制
在 Qt 开发中,内存管理和对象生命周期的处理是至关重要的一环。特别是在涉及信号和槽机制时,如何正确删除对象会直接影响应用程序的稳定性。本文将详细讨论在使用 Qt 的信号和槽机制时,delete 和 deleteLater 的工作原理,并给出最…...
自学鸿蒙HarmonyOS的ArkTS语言<一>基本语法
一、一个ArkTs的目录结构 二、一个页面的结构 A、装饰器 Entry 装饰器 : 标记组件为入口组件,一个页面由多个自定义组件组成,但是只能有一个组件被标记 Component : 自定义组件, 仅能装饰struct关键字声明的数据结构 State:组件中的状态变量…...
)】)
【OpenGauss源码学习 —— (ALTER TABLE(列存修改列类型))】
ALTER TABLE(列存修改列类型) ATExecAlterColumnType 函数1. 检查和处理列存储表的字符集:2. 处理自动递增列的数据类型检查:3. 处理生成列的类型转换检查:4. 处理生成列的数据类型转换: build_column_defa…...
【大数据 复习】第7章 MapReduce(重中之重)
一、概念 1.MapReduce 设计就是“计算向数据靠拢”,而不是“数据向计算靠拢”,因为移动,数据需要大量的网络传输开销。 2.Hadoop MapReduce是分布式并行编程模型MapReduce的开源实现。 3.特点 (1)非共享式,…...

Zookeeper:节点
文章目录 一、节点类型二、监听器及节点删除三、创建节点四、监听节点变化五、判断节点是否存在 一、节点类型 持久(Persistent):客户端和服务器端断开连接后,创建的节点不删除。 持久化目录节点:客户端与Zookeeper断…...

生产级别的 vue
生产级别的 vue 拆分组件的标识更好的组织你的目录如何解决 props-base 设计的问题transparent component (透明组件)可减缓上述问题provide 和 inject vue-meta 在路由中的使用如何确保用户导航到某个路由自己都重新渲染?测试最佳实践如何制…...
spring-kafka(1)集成方法)
kafka(五)spring-kafka(1)集成方法
一、集成 1、pom依赖 <!--kafka--><dependency><groupId>org.apache.kafka</groupId><artifactId>kafka-clients</artifactId></dependency><dependency><groupId>org.springframework.kafka</groupId><artif…...

Java中的设计模式深度解析
Java中的设计模式深度解析 大家好,我是免费搭建查券返利机器人省钱赚佣金就用微赚淘客系统3.0的小编,也是冬天不穿秋裤,天冷也要风度的程序猿! 在软件开发领域,设计模式是一种被广泛应用的经验总结和解决方案&#x…...
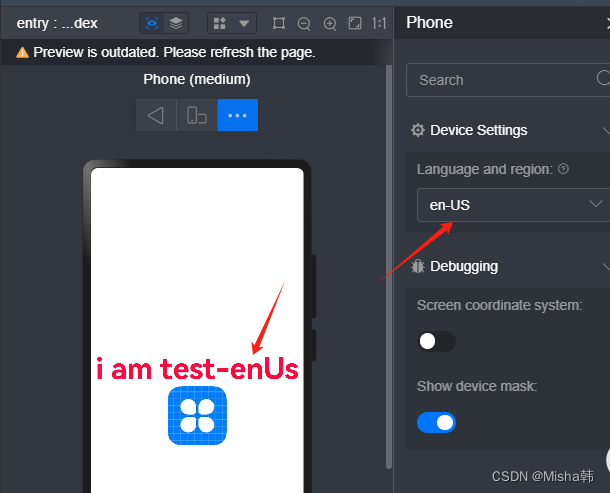
鸿蒙 HarmonyOS NEXT星河版APP应用开发—上篇
一、鸿蒙开发环境搭建 DevEco Studio安装 下载 访问官网:https://developer.huawei.com/consumer/cn/deveco-studio/选择操作系统版本后并注册登录华为账号既可下载安装包 安装 建议:软件和依赖安装目录不要使用中文字符软件安装包下载完成后࿰…...
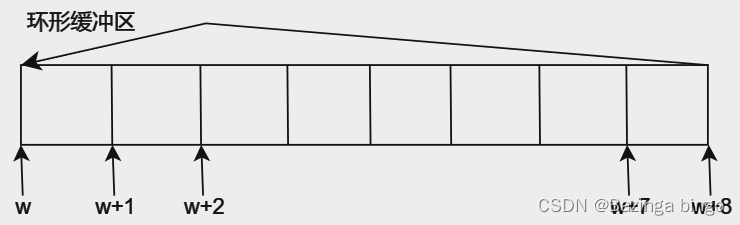
[FreeRTOS 基础知识] 互斥访问与回环队列 概念
文章目录 为什么需要互斥访问?使用队列实现互斥访问休眠和唤醒机制环形缓冲区 为什么需要互斥访问? 在裸机中,假设有两个函数(func_A, func_B)都要修改a的值(a),那么将a定义为全局变…...
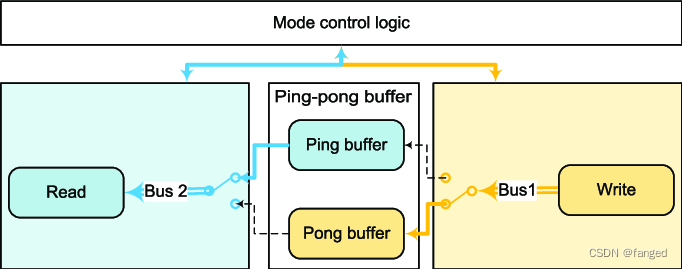
音视频的Buffer处理
最近在做安卓下UVC的一个案子。正好之前搞过ST方案的开机广告,这个也是我少数最后没搞成功的项目。当时也有点客观原因,当时ST要退出机顶盒市场,所以一切的支持都停了,当时啃他家播放器几十万行的代码,而且几乎没有文档…...

【总结】攻击 AI 模型的方法
数据投毒 污染训练数据 后门攻击 通过设计隐蔽的触发器,使得模型在正常测试时无异常,而面对触发器样本时被操纵输出。后门攻击可以看作是特殊的数据投毒,但是也可以通过修改模型参数来实现 对抗样本 只对输入做微小的改动,使模型…...

零门槛NAS搭建:WinNAS如何让普通电脑秒变私有云?
一、核心优势:专为Windows用户设计的极简NAS WinNAS由深圳耘想存储科技开发,是一款收费低廉但功能全面的Windows NAS工具,主打“无学习成本部署” 。与其他NAS软件相比,其优势在于: 无需硬件改造:将任意W…...
:にする)
日语学习-日语知识点小记-构建基础-JLPT-N4阶段(33):にする
日语学习-日语知识点小记-构建基础-JLPT-N4阶段(33):にする 1、前言(1)情况说明(2)工程师的信仰2、知识点(1) にする1,接续:名词+にする2,接续:疑问词+にする3,(A)は(B)にする。(2)復習:(1)复习句子(2)ために & ように(3)そう(4)にする3、…...
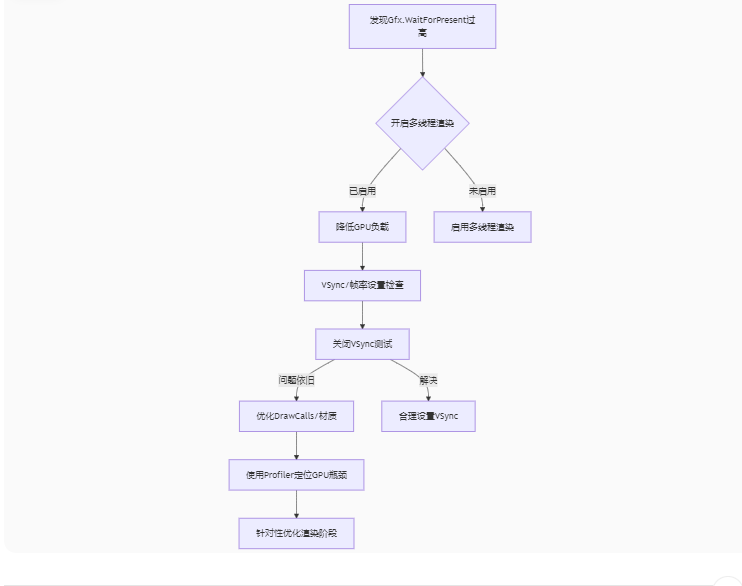
Unity3D中Gfx.WaitForPresent优化方案
前言 在Unity中,Gfx.WaitForPresent占用CPU过高通常表示主线程在等待GPU完成渲染(即CPU被阻塞),这表明存在GPU瓶颈或垂直同步/帧率设置问题。以下是系统的优化方案: 对惹,这里有一个游戏开发交流小组&…...

Java如何权衡是使用无序的数组还是有序的数组
在 Java 中,选择有序数组还是无序数组取决于具体场景的性能需求与操作特点。以下是关键权衡因素及决策指南: ⚖️ 核心权衡维度 维度有序数组无序数组查询性能二分查找 O(log n) ✅线性扫描 O(n) ❌插入/删除需移位维护顺序 O(n) ❌直接操作尾部 O(1) ✅内存开销与无序数组相…...
指令的指南)
在Ubuntu中设置开机自动运行(sudo)指令的指南
在Ubuntu系统中,有时需要在系统启动时自动执行某些命令,特别是需要 sudo权限的指令。为了实现这一功能,可以使用多种方法,包括编写Systemd服务、配置 rc.local文件或使用 cron任务计划。本文将详细介绍这些方法,并提供…...
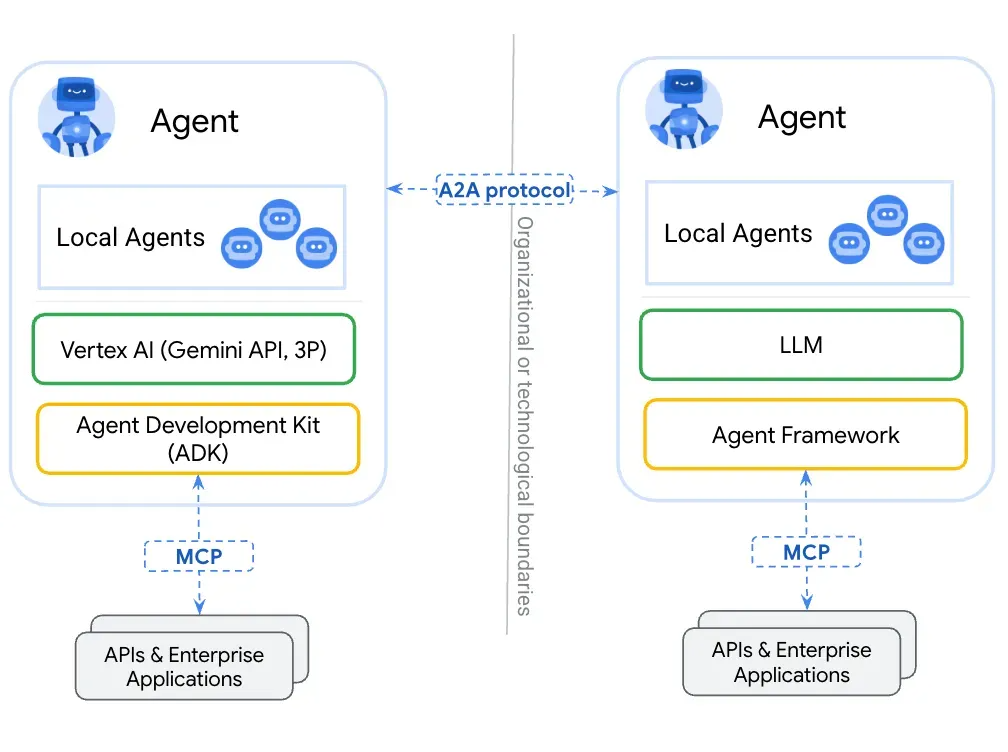
第一篇:Agent2Agent (A2A) 协议——协作式人工智能的黎明
AI 领域的快速发展正在催生一个新时代,智能代理(agents)不再是孤立的个体,而是能够像一个数字团队一样协作。然而,当前 AI 生态系统的碎片化阻碍了这一愿景的实现,导致了“AI 巴别塔问题”——不同代理之间…...
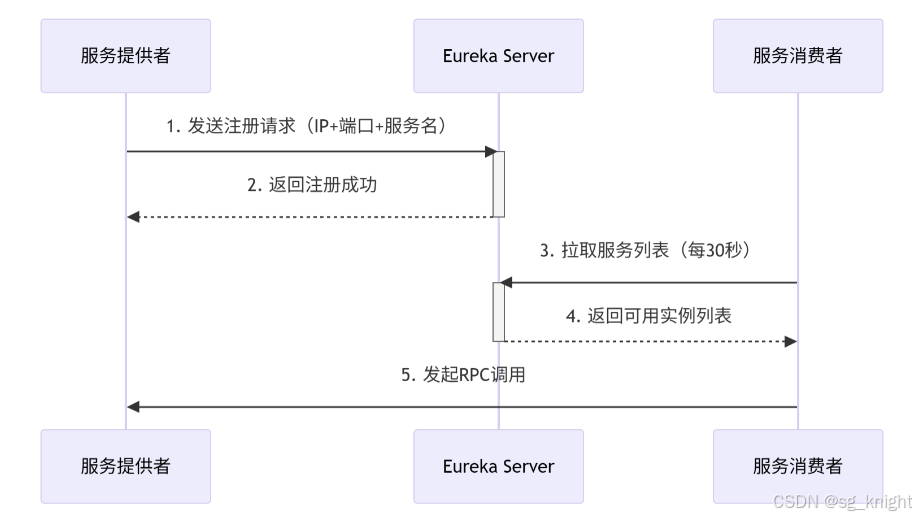
Springcloud:Eureka 高可用集群搭建实战(服务注册与发现的底层原理与避坑指南)
引言:为什么 Eureka 依然是存量系统的核心? 尽管 Nacos 等新注册中心崛起,但金融、电力等保守行业仍有大量系统运行在 Eureka 上。理解其高可用设计与自我保护机制,是保障分布式系统稳定的必修课。本文将手把手带你搭建生产级 Eur…...
SpringCloudGateway 自定义局部过滤器
场景: 将所有请求转化为同一路径请求(方便穿网配置)在请求头内标识原来路径,然后在将请求分发给不同服务 AllToOneGatewayFilterFactory import lombok.Getter; import lombok.Setter; import lombok.extern.slf4j.Slf4j; impor…...

Pinocchio 库详解及其在足式机器人上的应用
Pinocchio 库详解及其在足式机器人上的应用 Pinocchio (Pinocchio is not only a nose) 是一个开源的 C 库,专门用于快速计算机器人模型的正向运动学、逆向运动学、雅可比矩阵、动力学和动力学导数。它主要关注效率和准确性,并提供了一个通用的框架&…...

安宝特方案丨船舶智造的“AR+AI+作业标准化管理解决方案”(装配)
船舶制造装配管理现状:装配工作依赖人工经验,装配工人凭借长期实践积累的操作技巧完成零部件组装。企业通常制定了装配作业指导书,但在实际执行中,工人对指导书的理解和遵循程度参差不齐。 船舶装配过程中的挑战与需求 挑战 (1…...