典型传感器简介及驱动安装
代码框架
#include <librealsense2/rs.hpp>
#include "example-imgui.hpp"
// 定义投影方向
enum class direction
{to_depth,to_color
};
// Forward definition of UI rendering, implemented below
void render_slider(rect location, float* alpha, direction* dir);
int main(int argc, char * argv[]) try
112 cvlife.net
{std::string serial;if (!device_with_streams({ RS2_STREAM_COLOR,RS2_STREAM_DEPTH },
serial))return EXIT_SUCCESS;// Create and initialize GUI related objectswindow app(1280, 720, "RealSense Align Example"); // Simple
window handlingImGui_ImplGlfw_Init(app, false); // ImGui library
intializitionrs2::colorizer c; // Helper to colorize depth
imagestexture depth_image, color_image; // Helpers for renderig
images// Create a pipeline to easily configure and start the camerars2::pipeline pipe;rs2::config cfg;if (!serial.empty())cfg.enable_device(serial);cfg.enable_stream(RS2_STREAM_DEPTH);cfg.enable_stream(RS2_STREAM_COLOR);pipe.start(cfg);// 定义两种投影方向rs2::align align_to_depth(RS2_STREAM_DEPTH);rs2::align align_to_color(RS2_STREAM_COLOR);// 透明度系数float alpha = 0.5f; // Transparancy
coefficient// 默认从彩色图投影到深度图direction dir = direction::to_depth; // Alignment directionwhile (app) // Application still alive?{// Using the align object, we block the application until a
frameset is availablers2::frameset frameset = pipe.wait_for_frames();if (dir == direction::to_depth){// Align all frames to depth viewport
113 cvlife.netframeset = align_to_depth.process(frameset);}else{// Align all frames to color viewportframeset = align_to_color.process(frameset);}// With the aligned frameset we proceed as usualauto depth = frameset.get_depth_frame();auto color = frameset.get_color_frame();auto colorized_depth = c.colorize(depth);glEnable(GL_BLEND);// Use the Alpha channel for blendingglBlendFunc(GL_SRC_ALPHA, GL_ONE_MINUS_SRC_ALPHA);if (dir == direction::to_depth){// When aligning to depth, first render depth image// and then overlay color on top with transparancydepth_image.render(colorized_depth, { 0, 0, app.width(),
app.height() });color_image.render(color, { 0, 0, app.width(),
app.height() }, alpha);}else{// When aligning to color, first render color image// and then overlay depth image on topcolor_image.render(color, { 0, 0, app.width(),
app.height() });depth_image.render(colorized_depth, { 0, 0, app.width(),
app.height() }, 1 - alpha);}glColor4f(1.f, 1.f, 1.f, 1.f);glDisable(GL_BLEND);// Render the UI:ImGui_ImplGlfw_NewFrame(1);render_slider({ 15.f, app.height() - 60, app.width() - 30,
app.height() }, &alpha, &dir);ImGui::Render();
114 cvlife.net}return EXIT_SUCCESS;
相关文章:

典型传感器简介及驱动安装
双目视觉传感器 Indemind 传感器简介 INDEMIND M1 是专为开发者提供的一款硬件,采用“双目摄像头IMU”多传感器融合架构与 微秒级时间同步机制,为视觉 SLAM 研究提供精准稳定数据源,以满足 SLAM 研究、导航及 避障开发、视觉动作捕捉开发、…...
linux和Win——显卡驱动、Anaconda及pytorch安装(无需单独安装cuda、cudnn)
今天给新电脑的双系统(windows11和ubuntu22.04)安装了深度学习环境,在此记录一下。 一、Linux系统 (一)安装显卡驱动 (1)在安装Nvidia显卡驱动前,一定要点一下下面的“软件更新器…...
)
机器学习之多模态学习FLAVA(Foundational Language and Vision Alignment)
FLAVA(Foundational Language and Vision Alignment)是Meta AI提出的一种多模态学习模型,旨在处理自然语言和视觉任务。FLAVA通过联合学习文本和图像的特征表示,实现了在多模态任务上的优异性能。 FLAVA的基本概念 多模态学习: 多模态学习涉及同时处理多种类型的数据,例…...

Maven高级-证书校验
文章目录 SSL忽略配置IDEA里配置SSL忽略补充场景 SSL忽略配置 mvn -X clean install -Dmaven.resolver.transportwagon -Dmaven.wagon.http.ssl.insecuretrue -Dmaven.wagon.http.ssl.allowalltrue -Dmaven.wagon.http.ssl.ignore.validity.datestrueIDEA里配置SSL忽略 两个地…...
flutter是app跨平台最优解吗?
哈喽,我是老刘 最近在知乎上看到这样一个问题 我们先来解释一下问题中碰到的几个现象的可能原因,然后聊聊跨平台的最优解问题 问题解释 1、跟手、丝滑问题 这个问题其实很多人是有误解的,觉得原生的就丝滑跟手 其实不是这样的 我在做Flut…...

算法 Hw9
Hw 9 1 Scheduling with profits and deadlines12345 2 Parallel machine1234 1 Scheduling with profits and deadlines 1 决策问题表述: 给定一个利润值 P P P,是否存在一个任务调度方案使得完成所有任务的总利润至少为 P P P 2 在 NP 类中&…...
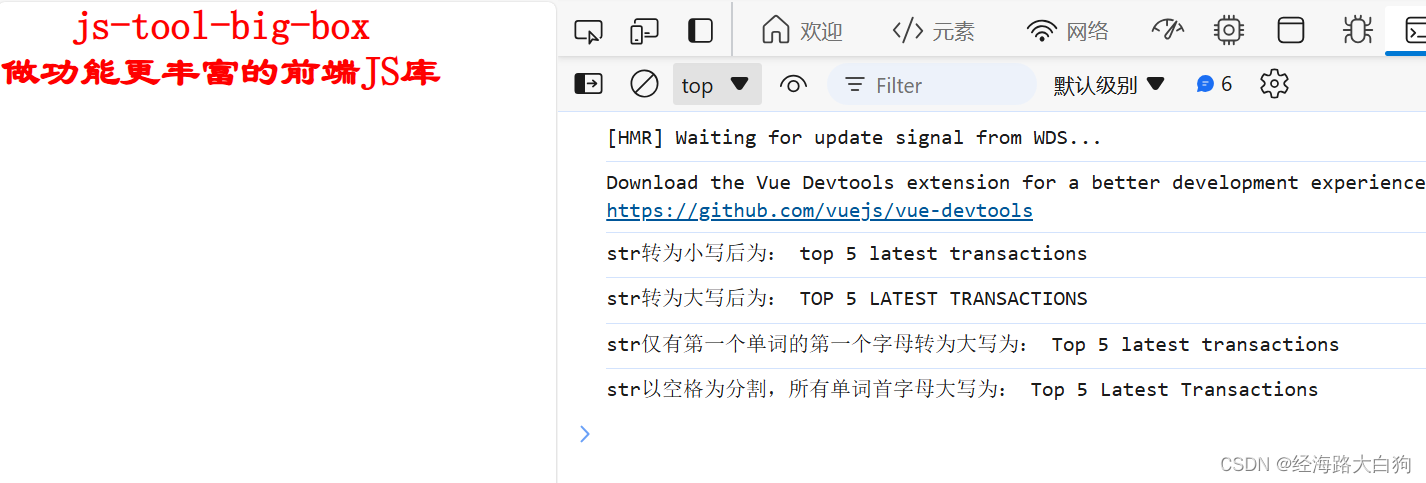
前端JS必用工具【js-tool-big-box】学习,字符串字母大小写转换的方法使用
这一小节,我们说一下 js-tool-big-box 工具库中,字符串字母大小写转换的使用。请注意:不是说单纯的把字符串转为大写,或者小写。关注 js-tool-big-box 的小伙伴可能知道,我们并没有把一些特别基础的,JS原生…...

Zookeeper:分布式系统中的协调者
Zookeeper:分布式系统中的协调者 前言:引言Zookeeper是什么? 基本概念Zookeeper 数据模型Znode 类型会话Watcher 应用场景分布式锁配置维护组服务名字服务 典型应用场景数据发布/订阅负载均衡命名服务分布式协调/通知集群管理Master选举 工作…...

如何使用代理IP进行数据抓取,PHP爬虫抓取京东商品数据
使用代理IP进行数据抓取通常是为了绕过IP封锁、提高抓取效率或保护你的真实IP地址。在PHP中,你可以使用cURL库来发送HTTP请求,并通过设置cURL选项来使用代理IP。 以下是一个基本的步骤说明,展示如何使用PHP和cURL库结合代理IP来抓取京东商品…...
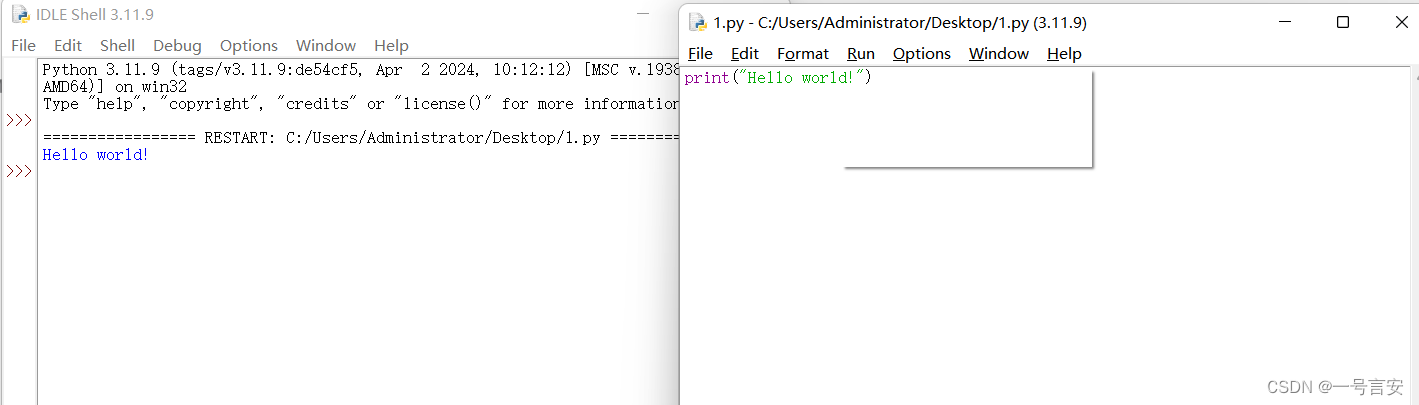
一口气安装【Python】教程
浏览器搜索python,或者直接跳转网址。 https://www.python.orghttps://www.python.org/ 找到想下载的版本 根据自己电脑下载相应的版本 自定义安装 下一步 修改路径,然后点击安装 等待一会,喝个饮料 点击关闭 安装成功 安装结束...

华为HCIP Datacom H12-821 卷13
1.多选题 以下关于二层漫游和三层漫游的描述,以下说法正确的是? A、如果 STA 漫游时前后关联的 VLAN ID 相同则一定属于二层漫游 B、二层漫游是指客户端在同一子网内漫游 C、三层漫游是指客户端在不同子网间漫游 D、三层漫游前后 STA 关联的 AP 服务集上的 VL AN 必须相…...
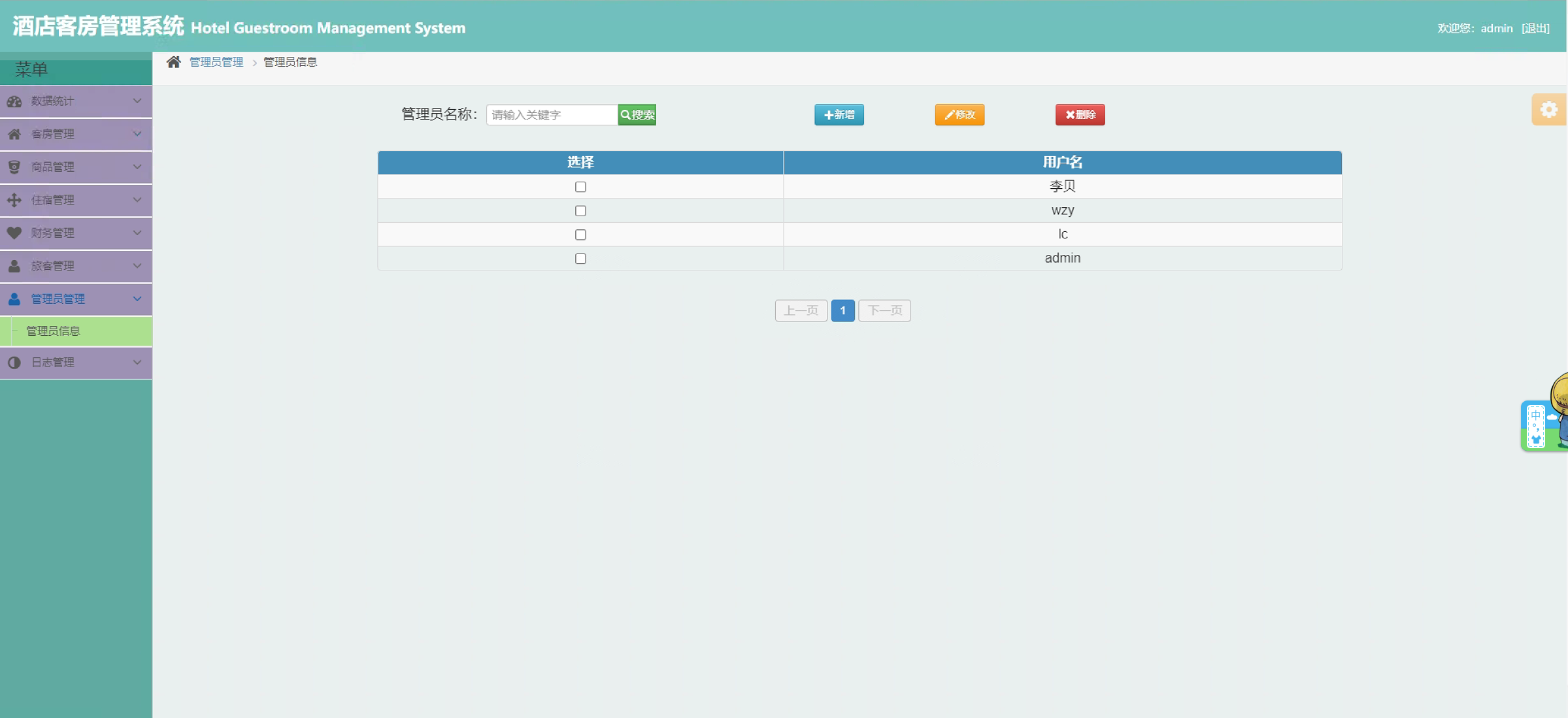
基于SSM的酒店客房管理系统
基于SSM的酒店客房管理系统 ✌全网粉丝20W,csdn特邀作者、博客专家、CSDN新星计划导师、java领域优质创作者,博客之星、掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java技术领域和毕业项目实战✌ 🍅获取项目下载方式🍅 链接点击直达:下载…...
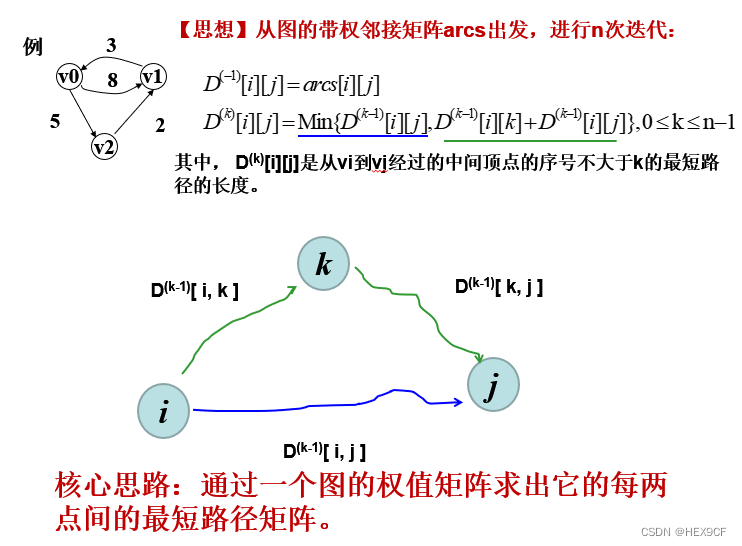
【数据结构与算法】最短路径,Floyd算法,Dijkstra算法 详解
Floyd算法 for (int k 0; k < n; k) {for (int i 0; i < n; i) {for (int j 0; j < n; j) {if (d[i][k] ! INF && d[k][j] ! INF) {d[i][j] min(d[i][j], d[i][k] d[k][j]);}}} }Dijkstra算法(基于最小堆) void dijkstra(int st…...

PHP中如何进行网络爬虫和数据抓取?
随着互联网时代的到来,网络数据的爬取与抓取已成为许多人的日常工作。在支持网页开发的程序语言中,php以其可扩展性和易上手的特点,成为了网络爬虫和数据抓取的热门选项。本文将从以下几个方面介绍php中如何进行网络爬虫和数据抓取。 一、HT…...
【Hadoop集群搭建】实验3:JDK安装及配置、Hadoop本地模式部署及测试
1. 安装 SSH 工具 SSH Secure Shell Client 传输软件 FinalShell(推荐使用) 1.1使用SSH工具将JDK安装包上传至虚拟主机hadoop01, hadoop02, hadoop03,sogou500w 数据上传至 hadoop01。 a. 在虚拟主机/usr 目录下创建文件夹 java,JDK 上传至此目录&…...

分布式锁在Spring Boot应用中的优雅实现
在现代微服务架构中,分布式锁是一种常用的技术手段,用于确保在分布式系统中,同一时间只有一个服务实例能够执行某个特定的操作。这对于防止并发问题、保证数据一致性至关重要。在Spring Boot应用中,我们可以通过自定义注解和切面的…...

常用框架-Spring Boot
常用框架-Spring Boot 1、Spring Boot是什么?2、为什么要使用Spring Boot?3、Spring Boot的核心注解是哪个?它主要由哪几个注解组成的?4、有哪些运行Spring Boot的方式?5、如何理解 Spring Boot 中的Starters?6、有哪些常见的Starters?7、如何在Spring Boot启动的时候运…...

AttributeError: module ‘cv2‘ has no attribute ‘face‘
Traceback (most recent call last): File "D:\AI_37\pythonProject7\day23\课堂代码\day23\07-人脸识别.py", line 4, in <module> recognizer cv2.face.LBPHFaceRecognizer_create() ^^^^^^^^ AttributeError: module cv2 has no at…...

不管你是普本还是双一流,建议你一定要尝试一下学习GIS开发
毕业季,很多企业的秋招和暑期实习已经开始了,在这个24秋招和25考研并列进行的毕业季,GIS专业的同学,做好自己的职业规划显得十分重要。 WebGIS开发,近年来成为了3S及相关专业的学生备受关注的热门选择。 不论是本科毕…...

OurBMC大咖说丨第5期:BMC开发中的非标准化问题探讨
栏目介绍:"OurBMC大咖说" 是由 OurBMC 社区精心策划的线上讲座栏目,邀请 BMC 相关领域大咖共同探讨 BMC 全栈技术的发展趋势、挑战和机遇。无论你是初学者还是资深从业者,"OurBMC大咖说" 都将为你提供一个宝贵的学习和交…...

零门槛NAS搭建:WinNAS如何让普通电脑秒变私有云?
一、核心优势:专为Windows用户设计的极简NAS WinNAS由深圳耘想存储科技开发,是一款收费低廉但功能全面的Windows NAS工具,主打“无学习成本部署” 。与其他NAS软件相比,其优势在于: 无需硬件改造:将任意W…...

Ubuntu系统下交叉编译openssl
一、参考资料 OpenSSL&&libcurl库的交叉编译 - hesetone - 博客园 二、准备工作 1. 编译环境 宿主机:Ubuntu 20.04.6 LTSHost:ARM32位交叉编译器:arm-linux-gnueabihf-gcc-11.1.0 2. 设置交叉编译工具链 在交叉编译之前&#x…...

使用VSCode开发Django指南
使用VSCode开发Django指南 一、概述 Django 是一个高级 Python 框架,专为快速、安全和可扩展的 Web 开发而设计。Django 包含对 URL 路由、页面模板和数据处理的丰富支持。 本文将创建一个简单的 Django 应用,其中包含三个使用通用基本模板的页面。在此…...

Linux链表操作全解析
Linux C语言链表深度解析与实战技巧 一、链表基础概念与内核链表优势1.1 为什么使用链表?1.2 Linux 内核链表与用户态链表的区别 二、内核链表结构与宏解析常用宏/函数 三、内核链表的优点四、用户态链表示例五、双向循环链表在内核中的实现优势5.1 插入效率5.2 安全…...
)
论文解读:交大港大上海AI Lab开源论文 | 宇树机器人多姿态起立控制强化学习框架(二)
HoST框架核心实现方法详解 - 论文深度解读(第二部分) 《Learning Humanoid Standing-up Control across Diverse Postures》 系列文章: 论文深度解读 + 算法与代码分析(二) 作者机构: 上海AI Lab, 上海交通大学, 香港大学, 浙江大学, 香港中文大学 论文主题: 人形机器人…...
STM32标准库-DMA直接存储器存取
文章目录 一、DMA1.1简介1.2存储器映像1.3DMA框图1.4DMA基本结构1.5DMA请求1.6数据宽度与对齐1.7数据转运DMA1.8ADC扫描模式DMA 二、数据转运DMA2.1接线图2.2代码2.3相关API 一、DMA 1.1简介 DMA(Direct Memory Access)直接存储器存取 DMA可以提供外设…...
微服务商城-商品微服务
数据表 CREATE TABLE product (id bigint(20) UNSIGNED NOT NULL AUTO_INCREMENT COMMENT 商品id,cateid smallint(6) UNSIGNED NOT NULL DEFAULT 0 COMMENT 类别Id,name varchar(100) NOT NULL DEFAULT COMMENT 商品名称,subtitle varchar(200) NOT NULL DEFAULT COMMENT 商…...

【python异步多线程】异步多线程爬虫代码示例
claude生成的python多线程、异步代码示例,模拟20个网页的爬取,每个网页假设要0.5-2秒完成。 代码 Python多线程爬虫教程 核心概念 多线程:允许程序同时执行多个任务,提高IO密集型任务(如网络请求)的效率…...

【Oracle】分区表
个人主页:Guiat 归属专栏:Oracle 文章目录 1. 分区表基础概述1.1 分区表的概念与优势1.2 分区类型概览1.3 分区表的工作原理 2. 范围分区 (RANGE Partitioning)2.1 基础范围分区2.1.1 按日期范围分区2.1.2 按数值范围分区 2.2 间隔分区 (INTERVAL Partit…...
:邮件营销与用户参与度的关键指标优化指南)
精益数据分析(97/126):邮件营销与用户参与度的关键指标优化指南
精益数据分析(97/126):邮件营销与用户参与度的关键指标优化指南 在数字化营销时代,邮件列表效度、用户参与度和网站性能等指标往往决定着创业公司的增长成败。今天,我们将深入解析邮件打开率、网站可用性、页面参与时…...