Isaac Sim 9 物理(1)
使用Python USD API 来实现 Physics 。
以下内容中,大部分 Python 代码可以在 Physics Python 演示脚本文件中找到,本文仅作为个人学习笔记。
一.设置 USD Stage 和物理场景
Setting up a USD Stage and a Physics Scene
USD Stage不知道怎么翻译,就是放置USD文件的地方,Isaac Sim软件和官方文档全英文,就算翻译了官方文档回去使用软件也全是英文...英语菜狗,啃的累死我了...
from pxr import Usd, UsdGeom, UsdPhysics, UsdShade, Sdf, Gf, Tf# Set up a USD Stage to define what is the up axis and set up the units,
# which is crucial, as some default simulation parameters are derived
# from the MetersPerUnit value
# 单位0.01m
stage = omni.usd.get_context().get_stage()
UsdGeom.SetStageUpAxis(stage, UsdGeom.Tokens.z)
UsdGeom.SetStageMetersPerUnit(stage, 0.01)# Physics scene definition
scene = UsdPhysics.Scene.Define(stage, "/physicsScene")# setup gravity
# note that gravity has to respect the selected units, if we are using cm, the gravity has to respect that
# 重力方向,下;重力大小,9.81m/s^2
scene.CreateGravityDirectionAttr().Set(Gf.Vec3f(0.0, 0.0, -1.0))
scene.CreateGravityMagnitudeAttr().Set(981.0)二.创建碰撞体
Creating Colliders
# Cube path
cubeActorPath = "/cubeActor"# Cube parameters like size, position, orientation
# 这个500测试发现实在太高了,第一次做的时候转一圈都没找到Cube,自己用设置10,50之类的就行
size = 25.0
position = Gf.Vec3f(0.0, 0.0, 500.0)
orientation = Gf.Quatf(1.0)
color = Gf.Vec3f(71.0 / 255.0, 105.0 / 255.0, 1.0)# define the cube geom(几何)
cubeGeom = UsdGeom.Cube.Define(stage, cubeActorPath)
cubeGeom.CreateSizeAttr(size)
cubeGeom.AddTranslateOp().Set(position)
cubeGeom.AddOrientOp().Set(orientation)
cubeGeom.AddScaleOp().Set(Gf.Vec3f(1.0))
cubeGeom.CreateDisplayColorAttr().Set([color])# get the prim
cubePrim = stage.GetPrimAtPath(cubeActorPath)# setup collision, so that the cube does collider
UsdPhysics.CollisionAPI.Apply(cubePrim)三.不同的碰撞体和渲染表现
Different Collision and Rendering Representations
必须创建两个不同的几何体,其中一个用于碰撞,另一个用于渲染(这里也可以理解为展示,一个作为碰撞箱隐藏,一个可以观察)。两个几何体的父 xform 应该设置为刚体,使它们能够一起移动。

# Top level actor, contains rigid body
rigidCompoundPath = "/compoundRigid"
rigidXform = UsdGeom.Xform.Define(stage, rigidCompoundPath)
rigidPrim = stage.GetPrimAtPath(rigidCompoundPath)# Rigid body transform
rigidCompoundPos = Gf.Vec3f(0.0, 0.0, 10.0)
rigidXform.AddTranslateOp().Set(rigidCompoundPos)
rigidXform.AddOrientOp().Set(Gf.Quatf(1.0, 0.0, 0.0, 0.0))physicsAPI = UsdPhysics.RigidBodyAPI.Apply(rigidPrim)# Collision shape
collisionShape = rigidCompoundPath + "/physicsBoxShape"size = 25.0
shapePos = Gf.Vec3f(0.0)
shapeQuat = Gf.Quatf(1.0)cubeGeom = UsdGeom.Cube.Define(stage, collisionShape)
cubePrim = stage.GetPrimAtPath(collisionShape)
cubeGeom.CreateSizeAttr(size)
cubeGeom.AddTranslateOp().Set(shapePos)
cubeGeom.AddOrientOp().Set(shapeQuat)# set it as collision
UsdPhysics.CollisionAPI.Apply(cubePrim)# hide it from rendering
cubeGeom.CreatePurposeAttr(UsdGeom.Tokens.guide)# rendering shape
renderSphere = rigidCompoundPath + "/renderingSphere"sphereGeom = UsdGeom.Sphere.Define(stage, renderSphere)
#sphereGeom.CreateSizeAttr(20.0)
sphereGeom.AddTranslateOp().Set(shapePos)
sphereGeom.AddOrientOp().Set(shapeQuat)四.物理材料
Physics Materials
每个碰撞器都可以分配不同的物理材料。UsdPhysicsMaterialAPI 可以应用于任何其他材料,并且此 API 添加了物理材料属性,如静态/动态摩擦。要将材料分配给碰撞器,请使用具有“物理”目的的材料绑定。
# define physics material
materialPath = "/material"
mu = 1.0
UsdShade.Material.Define(stage, materialPath)
material = UsdPhysics.MaterialAPI.Apply(stage.GetPrimAtPath(materialPath))
material.CreateStaticFrictionAttr().Set(mu)
material.CreateDynamicFrictionAttr().Set(mu)
material.CreateRestitutionAttr().Set(0.0)
material.CreateDensityAttr().Set(1000.0)collisionAPI = UsdPhysics.CollisionAPI.Get(stage, collisionShape)# add the material to the collider
bindingAPI = UsdShade.MaterialBindingAPI.Apply(collisionAPI.GetPrim())
materialPrim = material.GetPrim()
material = UsdShade.Material(materialPrim)
bindingAPI.Bind(material, UsdShade.Tokens.weakerThanDescendants, "physics")五.使用凸网格进行圆柱和圆锥碰撞
Using Convex Mesh for Cylinder and Cone Collision
UsdGeom.Cylinder 和 UsdGeom.Cone prims 的碰撞默认近似为自定义几何体,以获得更高的精度。但是,您可以通过在碰撞部分下的物理设置中禁用相应的切换来将它们设置为使用凸网格。
注意:您还可以使用 Omniverse Create 内置的圆锥和圆柱网格几何体进行凸近似。这允许您细粒度控制是否应使用凸近似或自定义几何体碰撞器模拟单个几何体。
原文:
UsdGeom.Cylinder and UsdGeom.Cone prims’ collision is by default approximated as custom geometry for higher precision. However, you can set them to use convex mesh instead by disabling the corresponding toggles in the Physics settings under the collision section.
Note: you can also use the Omniverse Create built-in cone and cylinder mesh geometries for convex approximation. This allows you to fine grain control whether individual geometry should be simulated with a convex approximation or custom geometry collider.
我想应该可以对单个物体模块进行精细修改...还没试呢,晚上找个时间弄弄看。
六.刚体
Rigid Bodies
刚体在 Physics 架构中表示为应用于 xformable Prim 的 UsdPhysicsRigidBodyAPI 架构。
# Cube path
cubeActorPath = "/cubeActorRigid"# Cube parameters like size, position, orientation
size = 25.0
position = Gf.Vec3f(0.0, 0.0, 500.0)
orientation = Gf.Quatf(1.0)
color = Gf.Vec3f(71.0 / 255.0, 105.0 / 255.0, 1.0)# initial velocities
linVelocity = Gf.Vec3f(2.0, 1.0, 2.0)
angularVelocity = Gf.Vec3f(1.0, 0.0, 0.0)# define the cube geom
cubeGeom = UsdGeom.Cube.Define(stage, cubeActorPath)
cubeGeom.CreateSizeAttr(size)
cubeGeom.AddTranslateOp().Set(position)
cubeGeom.AddOrientOp().Set(orientation)
cubeGeom.AddScaleOp().Set(Gf.Vec3f(1.0))
cubeGeom.CreateDisplayColorAttr().Set([color])# get the prim
cubePrim = stage.GetPrimAtPath(cubeActorPath)# setup collision, so that the cube does collider
UsdPhysics.CollisionAPI.Apply(cubePrim)# setup physics - rigid body
rigidBodyAPI = UsdPhysics.RigidBodyAPI.Apply(cubePrim)# apply initial velocities
rigidBodyAPI.CreateVelocityAttr().Set(linVelocity)
rigidBodyAPI.CreateAngularVelocityAttr().Set(angularVelocity)在仿真过程中,如果要更改刚体的线速度,则必须更改 UsdPhysicsRigidBodyAPI 的速度属性:
rigidBodyAPI.CreateVelocityAttr().Set(newVelocity)6.1 刚体质量属性
Rigid Body Mass Properties
UsdPhysicsMassAPI 定义了刚体的质量属性。UsdPhysicsMassAPI 可以应用于具有 UsdPhysicsRigidBodyAPI 或 USdPhysicsCollisionAPI 的 Prim。它提供了多种定义刚体质量属性的方法:
physics:mass:质量属性。注意,任何子 Prim 在应用 UsdPhysicsMassAPI 时也可以具有质量属性。在这种情况下,优先规则是“父级质量属性覆盖子级的质量属性”。这可能有些反直觉,因为质量是一个计算得到的量,通常不是累积的。例如,如果父级的质量为 10,而两个子级中的一个质量为 20,允许子级的质量覆盖父级的质量将导致另一个子级的质量为 -10。
physics:density:密度属性。在刚体物理学的背景下,密度间接地通过公式(质量 = 密度 × 对象的体积)来设置质量。在同时指定密度和质量的情况下,质量具有优先权。与质量不同,子级 Prim 的密度将覆盖父级 Prim 的密度。注意,collisionAPI 的密度也可以通过 physicsMaterial 关系来设置。材料密度在密度定义中具有最弱的优先级。注意,密度遵循单位。因此,对于单位为 1 的水密度为 1000,对于单位为 0.01,水密度为 0.001。
physics:centerOfMass:Prim 本地空间中的质心。
physics:diagonalInertia:未旋转状态下对角化惯性张量。
physics:principalAxes:惯性张量主轴的方向(四元数表示),在 Prim 的本地空间中。
解析代码会收集每个碰撞形状的质量属性,并使用计算出的惯性张量来计算体的最终质量属性。如果未找到任何 massAPI,则使用默认密度 1000 来确定最终的质量。
# Cube path
cubeActorPath = "/cubeActorRigidMass"# Cube parameters like size, position, orientation
size = 25.0
position = Gf.Vec3f(0.0, 0.0, 500.0)
orientation = Gf.Quatf(1.0)
color = Gf.Vec3f(71.0 / 255.0, 105.0 / 255.0, 1.0)# define the cube geom
cubeGeom = UsdGeom.Cube.Define(stage, cubeActorPath)
cubeGeom.CreateSizeAttr(size)
cubeGeom.AddTranslateOp().Set(position)
cubeGeom.AddOrientOp().Set(orientation)
cubeGeom.AddScaleOp().Set(Gf.Vec3f(1.0))
cubeGeom.CreateDisplayColorAttr().Set([color])# get the prim
cubePrim = stage.GetPrimAtPath(cubeActorPath)# setup collision, so that the cube does collider
UsdPhysics.CollisionAPI.Apply(cubePrim)# setup physics - rigid body, so that cube does simulate as a rigid body
UsdPhysics.RigidBodyAPI.Apply(cubePrim)# custom center of mass
massAPI = UsdPhysics.MassAPI.Apply(cubePrim)
massAPI.CreateCenterOfMassAttr().Set(Gf.Vec3f(0.0, 0.0, 10.0))七.静态体和动态体的区别
Difference Between a Static Body and a Dynamic Body
如果找到具有 UsdPhysicsCollisionAPI 的 Geom Prim,则它可以属于静态实体或动态实体。决定的逻辑是这样的:
如果层次结构中的 prim 或任何父 Prim 上没有应用 UsdPhysicsRigidBodyAPI,则具有 UsdPhysicsCollisionAPI 的几何体将被视为静态实体。
还:
如果 physics:rigidBodyEnabled 属性为 true(默认值),则几何属于动态实体。
否则,Geom 属于静态实体。
八.运动体
Kinematic Body
如果需要通过动画或用户定义的目标位置来驱动身体,则应将 UsdPhysicsRigidBodyAPI 上的 physics:kinematicEnabled 属性设置为 true。
九.CPU 与 GPU 刚体动力学
CPU vs GPU Rigid Body Dynamics
默认情况下,在 GPU 上执行刚体仿真。可以在 Physics Debug 窗口中或使用场景属性覆盖管道。 为了使用 CPU 仿真,请在 UsdPhysicsScene prim 中添加一个 PhysxSceneAPI 并设置以下属性:
physxScene:broadphaseType - MBP
physxScene:enableGPUDynamics - 错误
对于 GPU 模拟,第一个设置为 GPU,第二个设置为 True。
相关文章:
Isaac Sim 9 物理(1)
使用Python USD API 来实现 Physics 。 以下内容中,大部分 Python 代码可以在 Physics Python 演示脚本文件中找到,本文仅作为个人学习笔记。 一.设置 USD Stage 和物理场景 Setting up a USD Stage and a Physics Scene USD Stage不知道怎么翻译&#…...

vue vue.config.js webpack 加密混淆代码
一、下载加密插件 webpack-obfuscator npm install --save-dev webpack-obfuscatorVue CLI 本身依赖于 Webpack 进行构建和打包。不需要单独安装 Webpack 二、配置vue.config.js const { defineConfig } require(vue/cli-service) const WebpackObfuscator require(webpac…...

Talk|北京大学PKU-DAIR余昭辰:从多模态理解到生成 - 从LLM到Diffusion Model
本期为TechBeat人工智能社区第603期线上Talk。 北京时间6月26日(周三)20:00,北京大学PKU-DAIR实习生—余昭辰的Talk已经准时在TechBeat人工智能社区开播! 他与大家分享的主题是: “从多模态理解到生成 - 从LLM到Diffusion Model”,在本次Talk…...
)
数据中台高频面试题及参考答案(持续更新)
做大数据开发的,个人感觉招人最多的是是数据中台和数据仓库领域的。所以对数据中台、数据仓库相关的面试题要熟悉。 什么是数据中台?它与传统数据仓库的区别是什么? 数据中台是一种企业级的数据管理和分析平台,旨在通过集成、处理和分析来自企业内外部的大量多样化的数据…...
腾讯云CVM,CentOS8系统下部署Java-Web项目步骤详解
在CVM中部署项目首先要配置好JDK,Tomcat,Mysql(这里以Tomcat和Mysql为例)。部署JDK和Tomcat的步骤可以参考 CentOS7系统下部署tomcat,浏览器访问localhost:8080/_不积跬步,无以至千里;不积小流,无以成江河。-CSDN博客 我这里从Mysql的安装和设…...

Jenkins 创建流水线任务
Jenkins是一个流行的持续集成(Continuous Integration,CI)工具。 Jenkins 创建任务 选择“流水线”类型,该类型的优点是定制化程度非常高 (可选)添加“参数化构建” 配置仓库选项(ssh连接、分支)和凭据…...

单总线协议耗材认证加密芯片ALPU-P
这是一款采用随机变量交换系统的认证加密芯片。ALPU-P与系统MCU以密码方式通信,MCU在诸如系统启动等关键场合检测ALPU-P加密芯片。所以即使盗版系统复制了PCB、内核甚至存储器中的固件,但若缺少ALPU-P芯片,该系统仍然无法工作。 加密芯片是对…...

【TS】TypeScript 有哪些类型
TypeScript 是 JavaScript 的一个超集,它添加了静态类型定义以及其他功能,使代码更加健壮和可维护。以下是 TypeScript 中的一些主要类型: 基础类型 boolean:布尔值,true 或 false。number:数字,…...
)
ErrnoException: open failed: EPERM (Operation not permitted)
在应用权限管理里面没有文件读写权限 <!-- // 1. 适配分区存储的特性,并在清单文件中注册一个 meta-data 属性--> <!-- // <meta-data android:name"ScopedStorage" android:value"true" />--> <!-- …...

乘法与位运算
目录 描述 输入描述: 输出描述: 参考代码 描述 题目描述: 进行一个运算单元的电路设计,A[7:0]*11111011,尽量用最少的资源实现,写出对应的 RTL 代码。 信号示意: A信号输入 B 信号输出…...
——定位)
HTML(20)——定位
定位 作用:灵活的改变盒子在网页中的位置 实现: 定位模式:position边偏移:设置盒子的位置 leftrighttopbottom 相对定位 position:relative 改变位置的参照物是自己原来的位置,并且不脱标占位&#x…...

精通scikit-learn:模型持久化与选择的最佳实践
在机器学习项目中,模型的持久化和选择是两个关键环节,它们直接影响到模型的可维护性、可扩展性和性能。scikit-learn作为Python中一个流行的机器学习库,提供了丰富的工具来支持模型的持久化和选择。本文将深入探讨scikit-learn中模型持久化和…...
JMeter安装与使用
安装包下载:https://pan.xunlei.com/s/VNigSM9IEjqNBVkw8by6i-LoA1?pwdu6gq# 也可以官网下载: 1.解压安装包 2.打开方式 (1)bin->ApacheJMeter.jar->打开界面 (2)如果(1)打…...

ubuntu 20.04 访问csdn报错 Secure connection failed
打扰了,csdn服务器的问题,和源没关系,后面又重新测试了一下。刚好那一刻网站连上了。 暂时没有好办法,等待一段时间就连上了,改host似乎也不太行。 问题原因: 我一边更新源 sudo apt update & apt up…...

Linux下如何设置可执行文件和库文件的环境变量?
在Linux系统中,可执行文件和库文件的查找路径是由环境变量控制的,其中最重要的是PATH环境变量用于可执行文件,而动态库的查找路径则由LD_LIBRARY_PATH环境变量决定。下面分别介绍这两个方面: 可执行文件的搜索路径(PA…...

gsap动画库对threejs模型的应用
前言 公司的一个3D编辑器项目,要在three模型上加一些补间动画。做了一些调研,最终选择了gsap,其丰富的缓动函数,强大的动画效果和兼容性,更适合公司的需求。 查看gsap文档,发现所有的例子都是针对dom元素…...
网管工作实践_02_IP/MAC地址管理工具
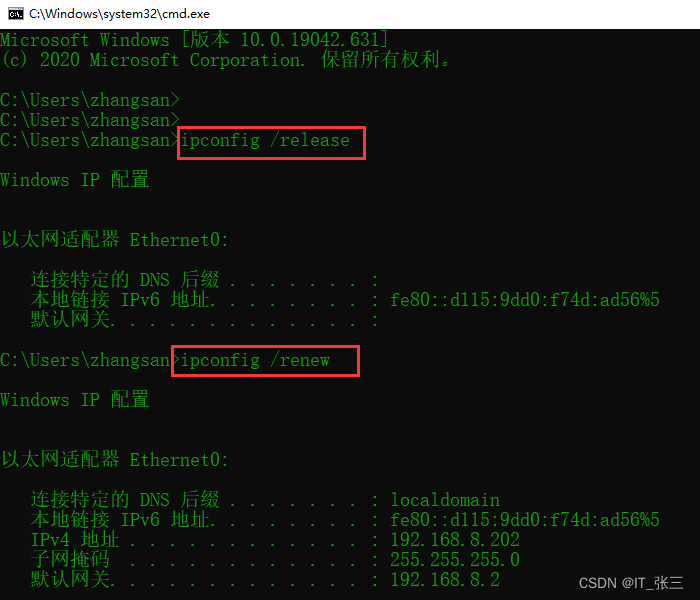
1、ipconfig命令格式及参数 ipconfig是内置于Windows的TCP/IP应用程序,用于显示本地计算机网络适配器的MAC地址和IP地址等配置信息,这些信息一般用来榆验手动配置的TCP/IP设置是否正确。当在网络中使用 DHCP服务时,IPConfig可以检测计算机中分…...

MySQL【触发器、存储过程、函数、范式】
day53 MySQL 触发器 创建触发器:(before : 前置触发器、after :后置触发器) 语法: delimiter xx 指定分隔符xxcreate trigger 触发器名 [before | after] 触发事件 on 表名 for each row 执行语句begin…...
Shopee API接口——获取商家店铺商品列表
一、引言 在跨境电商领域,Shopee作为东南亚地区领先的电商平台,为众多商家提供了广阔的市场和丰富的销售机会。本文将详细介绍如何通过Shopee API获取商家店铺商品列表,并探讨其应用场景。 二、核心功能介绍 Shopee API获取商家店铺商品列…...
linux基础知识14
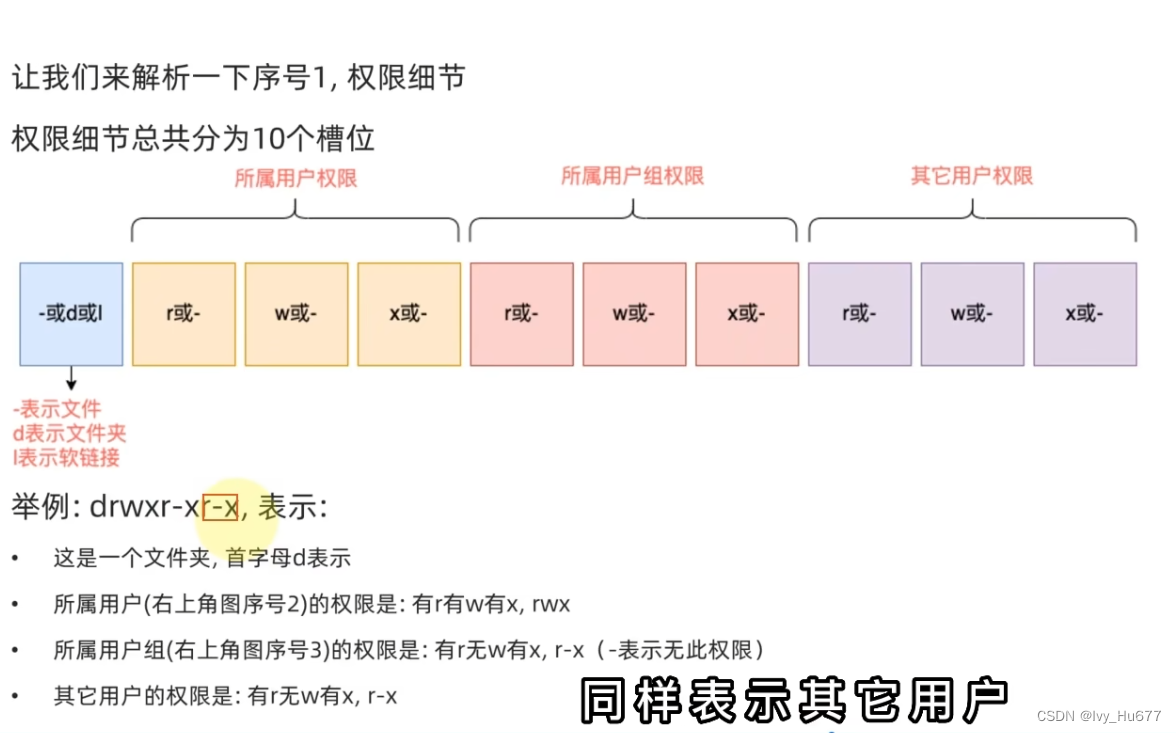
认知权限信息 通过ls -l可以以列表形式查看内容,并显示权限细节r代表读权限,针对文件可以查看文件内容,针对文件夹,可以查看文件夹内容,如ls命令w代表写权限,针对文件表示可以修改此文件,针对文…...

避坑指南:天地图加载GeoJSON绘制省市区划时,你可能遇到的3个关键问题与解决方案
天地图加载GeoJSON绘制行政区划的三大核心难题与实战解决方案 当开发者尝试在天地图平台上叠加GeoJSON数据绘制行政区划时,往往会遇到一些意料之外的"坑"。这些问题不仅影响开发效率,更可能导致最终呈现效果与预期相差甚远。本文将聚焦三个最常…...
)
Docker镜像拉取超时?5分钟搞定国内镜像源加速配置(附最新可用镜像列表)
Docker镜像加速全攻略:2024国内镜像源配置与疑难排解 每次在终端输入docker pull后盯着进度条卡住不动,是不是感觉血压都在飙升?作为国内开发者,Docker官方镜像源的访问问题就像一场永远打不完的"拉锯战"。但别急着摔键…...

工业级模拟量采集模块:空气温湿度采集,大棚环境全自动
模拟量采集模块在智慧农业中扮演着“神经末梢”的角色,负责将土壤/水体的温湿度、EC/pH、溶氧、光照等连续物理量转化为数字信号,为精准灌溉、水肥一体、水质调控提供可靠数据入口,直接决定生产决策的准确性与效率。一、系统架构感知层&#…...

2026 年膜结构车棚厂家怎么选?行业资深经验参考
2026 年,随着膜结构停车棚市场需求的不断增长,如何选择一家靠谱的膜结构车棚厂家,成为众多用户面临的重要问题。本文将详细介绍该行业的痛点,并分享选择膜结构车棚厂家的有效方法,为大家提供可落地的实用参考。当前膜结…...
)
保姆级教程:在CentOS 7.9上为SinoDB V16.8配置DBeaver连接(附sqlhosts文件详解)
从零构建SinoDB V16.8与DBeaver的高效连接体系:CentOS 7.9环境全流程精解 当企业级数据库SinoDB遇上可视化工具DBeaver,如何构建稳定高效的连接环境成为数据工程师的必修课。本文将带您深入CentOS 7.9系统,从底层配置到界面操作,打…...

4重防护打造微信记录安全备份:开源工具实战指南
4重防护打造微信记录安全备份:开源工具实战指南 【免费下载链接】WeChatExporter 一个可以快速导出、查看你的微信聊天记录的工具 项目地址: https://gitcode.com/gh_mirrors/wec/WeChatExporter 场景痛点:数字记忆的脆弱防线 你是否曾在手机突然…...
为何总为空?)
避坑指南:ABB机器人PC SDK开发中,网络扫描(NetworkScanner)为何总为空?
ABB机器人PC SDK网络扫描故障深度排查指南 当你在C#项目中调用NetworkScanner.Scan()方法时,那个本该充满控制器信息的ControllerInfoCollection却固执地保持空白——这种挫败感每个ABB机器人开发者都深有体会。本文将从协议栈底层到网络拓扑,系统性地拆…...

C++的constinit常量初始化与静态存储期变量的启动时间优化
C的constinit常量初始化与静态存储期变量的启动时间优化 在现代C开发中,程序的启动性能优化是一个不可忽视的课题。尤其是静态存储期变量(如全局变量或静态局部变量)的初始化,往往会导致程序启动时间延长。为了解决这一问题&…...

飞机遥感影像的数据集记录
飞机遥感影像的数据集记录: - 飞机检测数据集: DIOR、NWPU VHR-10、DOTA、LEVIR和RSOD等,但是上述数据集没有提供飞机目标具体型号信息,仅适用于飞机目标检测,不适用于飞机目标细粒度识别算法研究。 - 1. 飞机切片目标分类任务: M…...
存储)
文件(内部/外部)存储
Android 文件存储主要分为**内部存储**、**外部存储**(现在叫分区存储)和**其他介质**(如 SD 卡、USB)。理解它们的区别对开发很重要,特别是 Android 10+ 引入的**分区存储**机制。 1. 内部存储 (Internal Storage) 特点:私有、安全、随应用卸载而删除。其他应用和用户…...