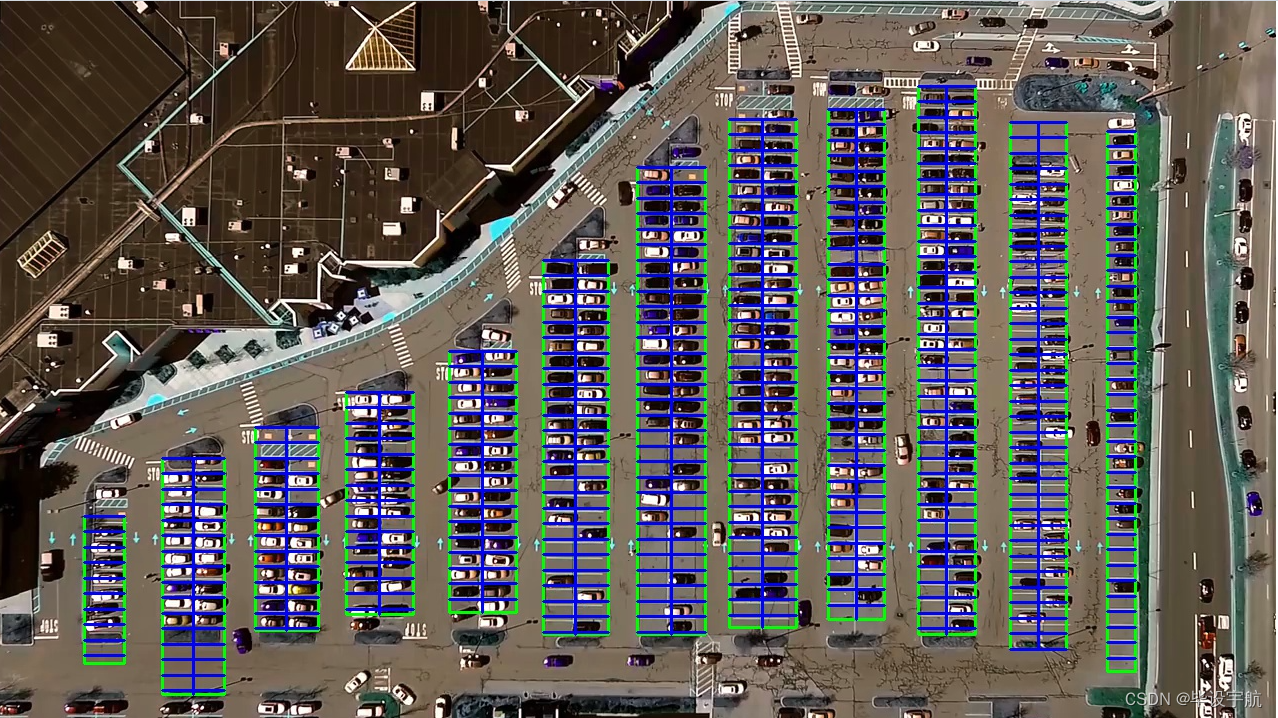
基于OpenCV与Keras的停车场车位自动识别系统
本项目旨在利用计算机视觉技术和深度学习算法,实现对停车场车位状态的实时自动识别。通过摄像头监控停车场内部,系统能够高效准确地辨认车位是否被占用,为车主提供实时的空闲车位信息,同时为停车场管理者提供智能化的车位管理工具。该系统结合了OpenCV的强大图像处理能力与Keras的易用性,便于快速构建和部署。
技术栈:
- OpenCV:用于图像的预处理,包括视频捕获、图像处理(如灰度转换、滤波、边缘检测等)以及ROI(感兴趣区域)的选取,为深度学习模型提供高质量的输入。
- Keras:基于TensorFlow的高级API,用于搭建和训练深度学习模型。项目中,可能采用预训练模型(如VGGNet、ResNet等)进行迁移学习,通过微调模型来适应车位识别任务,或者从零开始构建卷积神经网络(CNN)模型进行车位状态分类。
项目流程:
-
数据收集与预处理:首先,通过摄像头录制停车场视频,从中截取包含车位的画面,人工标注车位状态(如空闲或占用)。接着,对图像进行归一化、增强等预处理,创建训练和验证数据集。
-
模型训练:使用Keras构建深度学习模型,加载预处理后的数据集进行训练。训练过程中,可能涉及调整超参数、优化器选择、损失函数配置等,以达到理想的分类性能。
-
模型验证与优化:在验证集上评估模型性能,根据准确率、召回率等指标调整模型结构或参数,进行模型优化。
-
实时检测与应用:将训练好的模型集成到OpenCV中,实现实时视频流处理。系统不断捕获停车场的视频帧,进行图像处理后,通过模型预测车位状态。识别结果以可视化方式展示,如在视频流中标记车位为空闲或占用,并可进一步集成到停车场管理系统,实现车位引导、计费等功能。
特色与优势:
- 实时性:系统能够实时监控车位状态,及时更新信息,提高停车场的运营效率。
- 准确性:深度学习模型具有强大的特征学习能力,即使在复杂光照、遮挡等条件下也能保持较高识别准确率。
- 易部署与扩展:基于OpenCV和Keras的方案易于开发和调试,且模型可根据新数据持续优化,便于后续维护和功能升级。
- 智能化管理:为停车场管理者提供精准的车位占用情况,有助于优化停车资源分配,提升用户体验。
总结: 此项目通过融合OpenCV的图像处理能力和Keras构建的深度学习模型,实现了对停车场车位状态的自动识别,是智能交通系统和智慧城市应用中的一个重要组成部分,具有广泛的应用前景和社会价值。
from __future__ import division # 改变 Python 2 中除法操作符 / 的默认行为,使其表现得像 Python 3 中的除法操作符,结果会保留小数部分
import matplotlib.pyplot as plt # 用于创建图表和可视化数据的 Python 库
import cv2
import os, glob # glob文件名匹配的模块
import numpy as np
from PIL import Image
from keras.applications.imagenet_utils import preprocess_input
from keras.models import load_model
from keras.preprocessing import image
from Parking import Parking
import pickle # 序列化和反序列化对象的标准模块cwd = os.getcwd() # 获取当前工作目录def img_process(test_images, park):# 过滤背景,低于lower_red和高于upper_red的部分分别编程0,lower_red~upper_red之间的值编程255# map 函数用于将一个函数应用到可迭代对象的每个元素,并返回结果# 通过 list 函数将其转换为列表white_yellow_images = list(map(park.select_rgb_white_yellow,test_images))park.show_images(white_yellow_images)# 转灰度图gray_images = list(map(park.convert_gray_scale, white_yellow_images))park.show_images(gray_images)# 进行边缘检测edge_images = list(map(lambda image: park.detect_edges(image),gray_images))park.show_images(edge_images)# 根据需要设定屏蔽区域roi_images = list(map(park.select_region, edge_images))park.show_images(roi_images)# 霍夫变换,得出直线list_of_lines= list(map(park.hough_line, roi_images))# zip 函数来同时迭代 test_images 和 list_of_lines 中的元素line_images = []for image,lines in zip(test_images,list_of_lines):line_images.append(park.draw_lines(image,lines))park.show_images(line_images)rect_images = []rect_coords = [] # 列矩形for image,lines in zip(test_images, list_of_lines):# 过滤部分直线,对直线进行排序,得出每一列的起始点和终止点,并将列矩形画出来new_image,rects = park.identify_blocks(image,lines)rect_images.append(new_image)rect_coords.append(rects)park.show_images(rect_images)delineated = []spot_pos = []for image,rects in zip(test_images, rect_coords):# 在图上将停车位画出来,并返回字典{坐标:车位序号}new_image,spot_dict = park.draw_parking(image,rects)delineated.append(new_image)spot_pos.append(spot_dict)park.show_images(delineated)final_spot_dict = spot_pos[1]print(len(final_spot_dict))with open('spot_dict.pickle','wb') as handle:pickle.dump(final_spot_dict,handle,property==pickle.HIGHEST_PROTOCOL)park.save_images_for_cnn(test_images[0],final_spot_dict)return final_spot_dictdef keras_model(weights_path):model = load_model(weights_path)return modeldef img_test(test_image,final_spot_dict,model,class_dictionary):for i in range (len(test_images)):predicted_images = park.predict_on_image(test_images[i],final_spot_dict,model,class_dictionary)def video_test(video_name,final_spot_dict,model,class_dictionary):name = video_namecap = cv2.VideoCapture(name)park.predict_on_video(name,final_spot_dict,model,class_dictionary,ret=True)if __name__ == '__main__':test_images = [plt.imread(path) for path in glob.glob('test_images/*.jpg')]weights_path = 'car1.h5'video_name = 'parking_video.mp4'class_dictionary = {}class_dictionary[0] = 'empty'class_dictionary[1] = 'occupied'park = Parking()park.show_image(test_images)final_spot_dict = img_process(test_images, park)model = keras_model(weights_path)img_test(test_images,final_spot_dict,model,class_dictionary)video_test(video_name,final_spot_dict,model,class_dictionary)
parking py
import matplotlib.pyplot as plt
import cv2
import os,glob
import numpy as npclass Parking:def show_images(self, images, cmap=None):cols = 2rows = (len(images) + 1)//cols # //为整除运算符plt.figure(figsize=(15,12)) # 创建一个图形窗口,并指定其大小为 15x12 英寸for i,image in enumerate(images):plt.subplot(rows, cols, i+1) # 在当前图形窗口中创建一个子图,i+1 是因为子图的编号是从 1 开始的# 检查图像的维度,如果图像是二维的(灰度图像),则将颜色映射设置为灰度,否则保持传入的 cmap 参数不变cmap = 'gray' if len(image.shape)==2 else cmapplt.imshow(image, cmap=cmap)plt.xticks([]) # 去除 x 轴和 y 轴的刻度标签plt.yticks([])plt.tight_layout(pad=0,h_pad=0,w_pad=0) # 调整子图之间的间距plt.show()def cv_show(self, name, img):cv2.imshow(name, img)cv2.waitKey(0)cv2.destroyAllWindows()def select_rgb_white_yellow(self,image):# 过滤掉背景lower = np.uint8([120,120,120])upper = np.uint8([255,255,255])# 低于lower_red和高于upper_red的部分分别编程0,lower_red~upper_red之间的值编程255,相当于过滤背景white_mask = cv2.inRange(image,lower,upper)self.cv_show('white_mask',white_mask)# 与操作masked = cv2.bitwise_and(image, image, mask=white_mask)self.cv_show('masked',masked)return maskeddef convert_gray_scale(selfself,image):return cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)# 提取图像中的边缘信息# 返回的是一个二值图像,其中边缘点被标记为白色(255),而非边缘点被标记为黑色(0)def detect_edges(self, image, low_threshole=50, high_threshold=200):return cv2.Canny(image, low_threshole, high_threshold)def filter_region(self, image, vertices):# 剔除掉不需要的地方mask = np.zeros_like(image) # 创建和原图一样大的图,置零if len(mask.shape)==2: # 是否为一张灰度图cv2.fillPoly(mask, vertices, 255) # 使用顶点vertices在mask上填充多边形,并置为255白色self.cv_show('mask',mask)return cv2.bitwise_and(image,mask)def select_region(self, image):# 手动选择区域# 首先,通过顶点定义多边形。rows, cols = image.shape[:2] # h和wpt_1 = [cols*0.05, rows*0.09]pt_2 = [cols*0.05, rows*0.70]pt_3 = [cols*0.30, rows*0.55]pt_4 = [cols*0.6, rows*0.15]pt_5 = [cols*0.90, rows*0.15]pt_6 = [cols*0.90, rows*0.90]vertices = np.array([[pt_1, pt_2, pt_3, pt_4, pt_5, pt_6]],dtype=np.int32)point_img = image.copy()point_img = cv2.cvtColor(point_img, cv2.COLOR_BGR2GRAY)for point in vertices[0]:cv2.circle(point_img,(point[0], point[1]), 10, (0,0,255), 4)self.cv_show('point_img',point_img)return self.filter_region(image, vertices)# 霍夫变换,得出直线def hough_line(self,image):# 检测输入图像中的直线,并返回检测到的直线的端点坐标# 输入的图像需要是边缘检测后的结果# minLineLength(线的最短长度,比这个短的都被忽略)和MaxLineCap(两条直线之间的最大间隔,小于辞职,认为是一条直线)# rho以像素为单位的距离分辨率,通常设置为 1 像素# thrta角度精度# threshod直线交点数量阈值。只有累加器中某个点的投票数高于此阈值,才被认为是一条直线。return cv2.HoughLinesP(image, rho=0.1, thrta=np.pi/10, threshold=15,minLineLength=9,maxLineGap=4)# 过滤霍夫变换检测到的直线def draw_lines(self, image, lines, color=[255,0,0], thickness=2, make_copy=True):if make_copy:image = np.copy(image)cleaned = []for line in lines:for x1,y1,x2,y2 in line:if abs(y2-y1) <= 1 and abs(x2-x1) >= 25 and abs(x2-x1) <= 55:cleaned.append((x1,y1,x2,y2))cv2.line(image, (x1,y1), (x2,y2), color, thickness)print(" No lines detected: ", len(cleaned))return image# 过滤部分直线,对直线进行排序,得出每一列的起始点和终止点,并将列矩形画出来def identify_blocks(self, image, lines, make_copy=True):if make_copy:new_image = np.copy(image)# step1: 过滤部分直线cleaned = []for line in lines:for x1,y1,x2,y2 in line:if abs(y2-y1) <= 1 and abs(x2-x1) >= 25 and abs(x2-x1)<= 55:cleaned.append((x1,y1,x2,y2))# step2: 对直线按照 起始点的x和y坐标 进行排序import operator # 可以使用其中的各种函数来进行操作,例如比较、算术list1 = sorted(cleaned, key=operator.itemgetter(0,1)) # 从列表的每个元素中获取索引为0和1的值,然后将这些值用作排序的依据# step3: 找到多个列,相当于每列是一排车clusters = {} # 列数:对应该列有哪些车位线dIndex = 0clus_dist = 10for i in range(len(list1) - 1):distance = abs(list1[i+1][0] - list1[i][0]) # 根据前后两组车位线的x1距离if distance <= clus_dist:if not dIndex in clusters.keys(): clusters[dIndex] = []clusters[dIndex].append(list1[i])clusters[dIndex].append(list1[i + 1])else:dIndex += 1# step4: 得到每一列的四个坐标rects = {} # 每一列的四个角的坐标i = 0for key in clusters:all_list = clusters[key]# 将列表 all_list 转换为一个集合set,去重# {(10, 20, 30, 40), (20, 30, 40, 50)} 转为 [(10, 20, 30, 40), (20, 30, 40, 50)]cleaned = list(set(all_list))if len(cleaned) > 5:cleaned = sorted(cleaned, key=lambda tup: tup[1]) # 按y1进行排序avg_y1 = cleaned[0][1] # 第一条线段的起始点 y 坐标avg_y2 = cleaned[-1][1] # 最后一条线段的起始点 y 坐标,即整个区域的上下边界avg_x1 = 0avg_x2 = 0for tup in cleaned: # 累加起始点和结束点的 x 坐标avg_x1 += tup[0]avg_x2 += tup[2]avg_x1 = avg_x1/len(cleaned) # 取平均起始点和结束点x坐标值avg_x2 = avg_x2/len(cleaned)rects[i] = (avg_x1, avg_y1,avg_x2,avg_y2)i += 1print("Num Parking Lanes:", len(rects))# step5: 把列矩形画出来buff = 7for key in rects:tup_topLeft = (int(rects[key][0] - buff), int(rects[key][1])) # x1-buff, y1tup_botRight = (int(rects[key][2] + buff), int(rects[key][3])) # x2+buff, y2cv2.rectangle(new_image, tup_topLeft, tup_botRight,(0,255,0),3)return new_image,rects# 在图上将停车位画出来,并返回字典{坐标:车位序号}def draw_parking(self, image, rects, make_copy=True, color=[255,0,0], thickness=2, save=True):if make_copy:new_image = np.copy(image)gap = 15.5 # 一个车位大致高度spot_dict = {} # 字典:一个车位对应一个位置tot_spots = 0 # 总车位# 微调adj_y1 = {0: 20, 1: -10, 2: 0, 3: -11, 4: 28, 5: 5, 6: -15, 7: -15, 8: -10, 9: -30, 10: 9, 11: -32}adj_y2 = {0: 30, 1: 50, 2: 15, 3: 10, 4: -15, 5: 15, 6: 15, 7: -20, 8: 15, 9: 15, 10: 0, 11: 30}adj_x1 = {0: -8, 1: -15, 2: -15, 3: -15, 4: -15, 5: -15, 6: -15, 7: -15, 8: -10, 9: -10, 10: -10, 11: 0}adj_x2 = {0: 0, 1: 15, 2: 15, 3: 15, 4: 15, 5: 15, 6: 15, 7: 15, 8: 10, 9: 10, 10: 10, 11: 0}for key in rects:tup = rects[key]x1 = int(tup[0] + adj_x1[key])x2 = int(tup[2] + adj_x2[key])y1 = int(tup[1] + adj_y1[key])y2 = int(tup[3] + adj_y2[key])cv2.rectangle(new_image,(x1,y1), (x2,y2), (0,255,0), 2)num_splits = int(abs(y2-y1)//gap) # 一列总共有多少个车位for i in range (0,num_splits+1): # 画车位框y = int(y1 + i*gap)cv2.rectangle(new_image, (x1,y), (x2,y2), (0,255,0), 2)if key > 0 and key < len(rects)-1:# 竖直线x = int((x1+x2)/2)cv2.line(new_image,(x,y1),(x,y2),color,thickness)# 计算数量if key == 0 or key == (len(rects) - 1): # 对于第一列和最后一列(只有一排车位)tot_spots += num_splits + 1else:tot_spots += 2*(num_splits + 1) # 一列有两排车位# 字典对应好if key == 0 or key == (len(rects) - 1): # 对于第一列和最后一列(只有一排车位)for i in range(0, num_splits+1):cur_len = len(spot_dict)y = int(y1 + i*gap)spot_dict[(x1,y,x2,y+gap)] = cur_len + 1else:for i in range(0, num_splits+1):cur_len = len(spot_dict)y = int(y1 + i*gap)x = int((x1+x2)/2)spot_dict[(x1,y,x,y+gap)] = cur_len + 1spot_dict[(x,y,x2,y+gap)] = cur_len + 2print("total parking spaces: ", tot_spots, cur_len)if save:filename = 'with_parking.jpg'cv2.imwrite(filename, new_image)return new_image, spot_dict# 根据传入的起始点和终止点坐标列表画框def assign_spots_map(self, image, spot_dict, make_copy= True, color=[255,0,0], thickness=2):if make_copy:new_image = np.copy(image)for spot in spot_dict.keys():(x1,y1,x2,y2) = spotcv2.rectangle(new_image,(int(x1),int(y1)), (int(x2),int(y2)), color, thickness)return new_image# 遍历字典{坐标,车位号}在图片中截取对应坐标的图像,按车位号保存下来def save_images_for_cnn(self, image, spot_dict, folder_name= 'cnn_data'):for spot in spot_dict.keys():(x1,y1,x2,y2) = spot(x1,y1,x2,y2) = (int(x1),int(y1),int(x2),int(y2))# 裁剪spot_img= image[y1:y2, x1:x2]spot_img = cv2.resize(spot_img, (0,0), fx=2.0, fy=2.0)spot_id = spot_dict[spot]filename = 'spot' + str(spot_id) + '.jpg'print(spot_img.shape, filename, (x1,x2,y1,y2))cv2.imwrite(os.path.join(folder_name, filename), spot_img)# 将图像进行归一化,并将其转换成一个符合深度学习模型输入要求的四维张量,进行训练def make_prediction(self, image, model, class_dictionary):# 预处理img = image/255. # 将图像的像素值归一化到 [0, 1] 的范围内# 将图像转换成一个四维张量image = np.expend_dims(img, axis = 0)# 将图片调用keras算法进行预测class_predicted = model.predict(image) # 得出预测结果inID = np.argmax(class_predicted[0]) # 找到数组中最大值所在的索引label = class_dictionary[inID]return labeldef predict_on_image(self, image, spot_dict, model, class_dictionary,make_copy=True, color=[0,255,0], alpha=0.5):if make_copy:new_image = np.copy(image)overlay = np.copy(image)self.cv_show('new_image',new_image)cnt_empty = 0all_spots = 0for spot in spot_dict.keys():all_spots += 1(x1, y1, x2, y2) = spot(x1, y1, x2, y2) = (int(x1), int(y1), int(x2), int(y2))spot_img = image[y1:y2, x1:x2]spot_img = cv2.resize(spot_img, (48,48))label = self.make_prediction(spot_img, model, class_dictionary)if label== 'empty':cv2.rectangle(overlay, (int(x1), int(y1)), (int(x2), int(y2)), color, -1)cnt_empty += 1cv2.addWeighted(overlay, alpha, new_image, 1-alpha, 0, new_image)cv2.putText(new_image, "Available: %d spots" %cnt_empty, (30,95),cv2.FONT_HERSHEY_SIMPLEX,0.7,(255,255,255),2)cv2.putText(new_image, "Total: %d spots" %all_spots, (30,125),cv2.FONT_HERSHEY_SIMPLEX, 0.7,(255,255,255),2)save = Falseif save:filename = 'with_parking.jpg'cv2.imwrite(filename, new_image)self.cv_show('new_image',new_image)return new_imagedef predict_on_video(self, video_name, final_spot_dict, model, class_dictionary, ret=True):cap= cv2.VideoCapture(video_name)count = 0while ret:ret, image = cap.read()count += 1if count == 5:count == 0new_image = np.copy(image)overlay = np.copy(image)cnt_empty = 0all_spots = 0color = [0,255,0]alpha = 0.5for spot in final_spot_dict.keys():all_spots += 1(x1,y1,x2,y2) = spot(x1,y1,x2,y2) = (int(x1), int(y1), int(x2), int(y2))spot_img = image[y1:y2, x1:x2]spot_img = cv2.resize(spot_img, (48,48))label = self.make_prediction(spot_img, model, class_dictionary)if label == 'empty':cv2.rectangle(overlay, (int(x1),int(y1)), (int(x2),int(y2)), color, -1)cnt_empty += 1cv2.addWeighted(overlay, alpha, new_image, 1-alpha, 0, new_image)cv2.putText(new_image,"Available: %d spots" % cnt_empty,(30,95),cv2.FONT_HERSHEY_SIMPLEX, 0.7, (255,255,255),2)cv2.putText(new_image, "Total: %d spots" %all_spots, (30,125),cv2.FONT_HERSHEY_SIMPLEX, 0.7, (255,255,255), 2)cv2.imshow('frame',new_image)# 检测用户是否按下了 'q' 键if cv2.waitKey(10) & 0xFF == ord('q'): # 通过 & 0xFF 操作,可以确保只获取ASCII码的最后一个字节breakcv2.destroyWindow()cap.release()相关文章:
基于OpenCV与Keras的停车场车位自动识别系统
本项目旨在利用计算机视觉技术和深度学习算法,实现对停车场车位状态的实时自动识别。通过摄像头监控停车场内部,系统能够高效准确地辨认车位是否被占用,为车主提供实时的空闲车位信息,同时为停车场管理者提供智能化的车位管理工具…...

YOLOv10改进教程|C2f-CIB加入注意力机制
一、 导读 论文链接:https://arxiv.org/abs/2311.11587 代码链接:GitHub - CV-ZhangXin/AKConv YOLOv10训练、验证及推理教程 二、 C2f-CIB加入注意力机制 2.1 复制代码 打开ultralytics->nn->modules->block.py文件,复制SE注意力机…...
)
算法训练营day06 哈希表(统计数,去重,降低时间复杂度)
💡 解题思路 📝 确定输入与输出🔍 分析复杂度🔨 复杂题目拆分 :严谨且完整 地拆分为更小的子问题(哈希表的使用场景)–(多总结)💭 选择处理逻辑:…...

影帝郭晋安关联保健品企业,草姬集团无研发费用销售成本不低
《港湾商业观察》黄懿 5月30日,草姬集团控股有限公司(下称“草姬集团”)递表港交所主板,农银国际为其独家保荐人。 草姬集团成立于1999年,是中国香港多元化保健品、美容与护肤品供应商,由TVB港星郭晋安及…...
leetcode-19-回溯-组合问题(剪枝、去重)
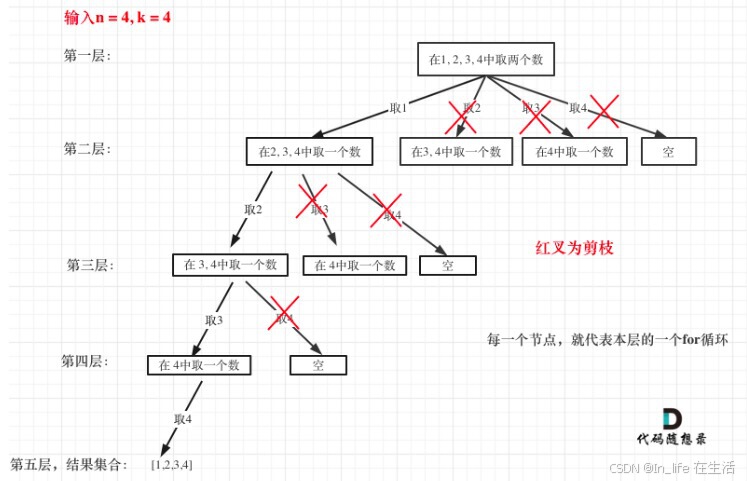
引自代码随想录 一、[77]组合 给定两个整数 n 和 k,返回 1 ... n 中所有可能的 k 个数的组合。 示例: 输入: n 4, k 2 输出: [ [2,4], [3,4], [2,3], [1,2], [1,3], [1,4]] 1、大致逻辑 k为树的深度,到叶子节点的路径即为一个结果 开始索引保证不…...
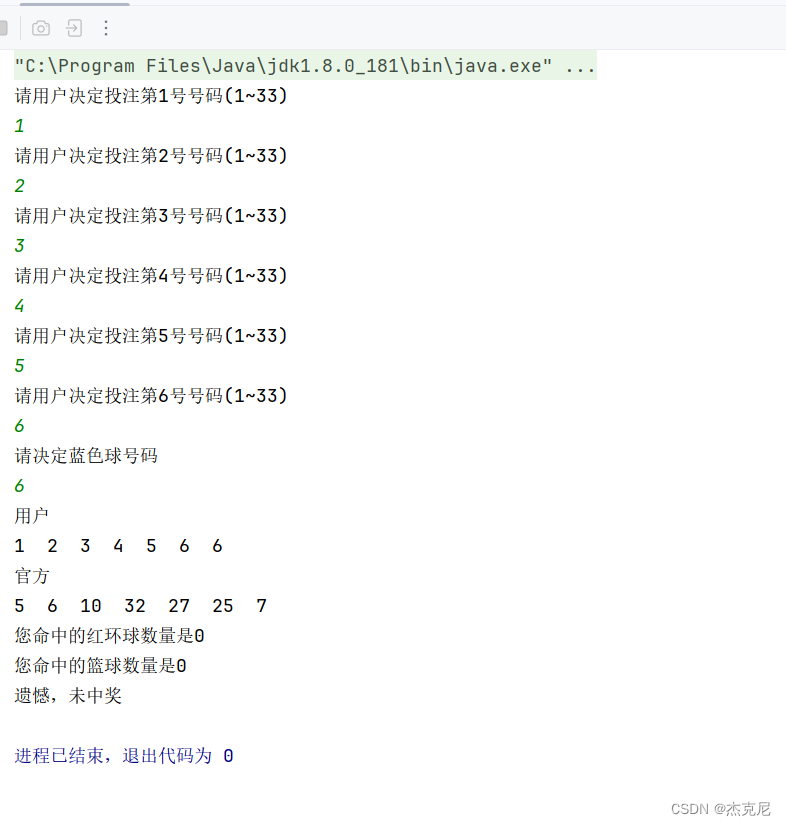
Java案例实现双色球
一问题: 二具体代码: package 重修;import java.util.Random; import java.util.Scanner;public class first {public static void main(String[] args) {int []usersnumbersusernumslect();System.out.println("用户");for (int i 0; i <…...
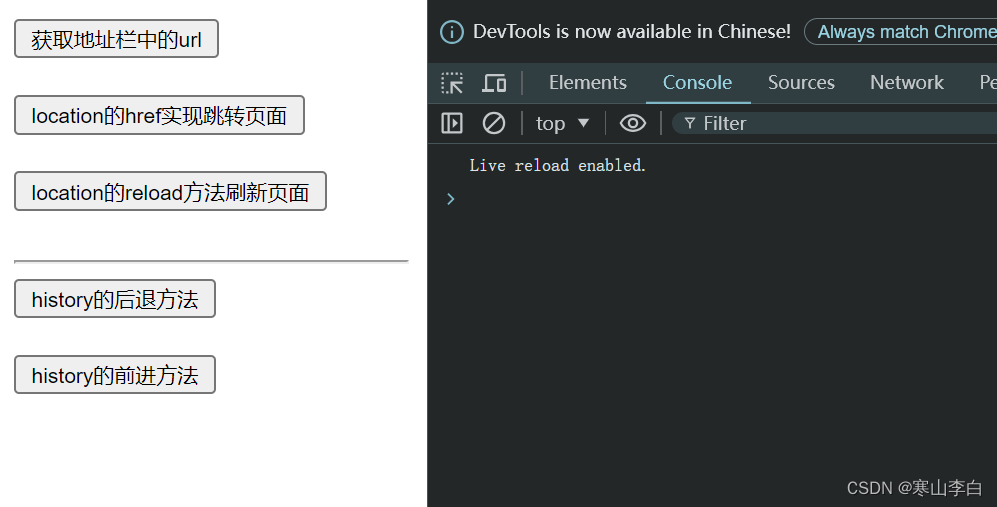
JS(JavaScript)的BOM操作
天行健,君子以自强不息;地势坤,君子以厚德载物。 每个人都有惰性,但不断学习是好好生活的根本,共勉! 文章均为学习整理笔记,分享记录为主,如有错误请指正,共同学习进步。…...
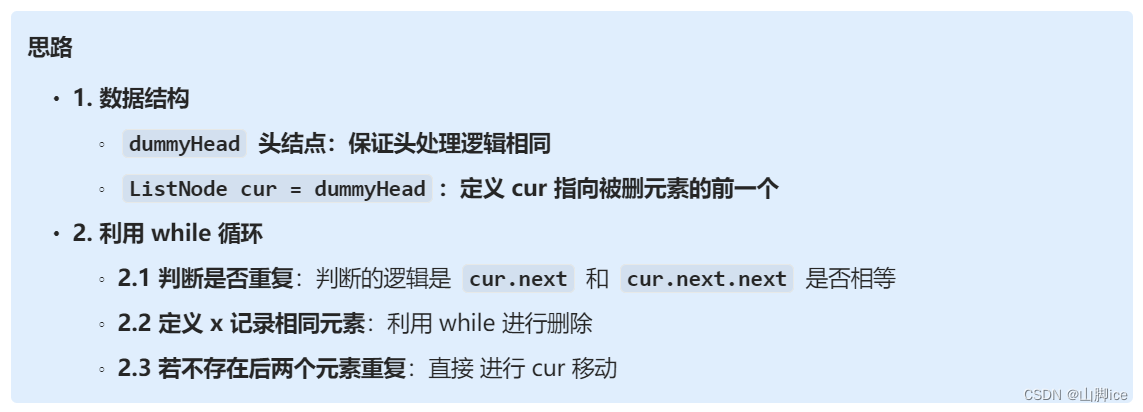
【CT】LeetCode手撕—82. 删除排序链表中的重复元素 II
题目 原题连接:82. 删除排序链表中的重复元素 II 1- 思路 模式识别1:已排序链表 ——> 判重逻辑 ,涉及到 while 2- 实现 ⭐82. 删除排序链表中的重复元素 II——题解思路 class Solution {public ListNode deleteDuplicates(ListNode h…...

C++ STL unique_ptr智能指针源码剖析
由于上一篇博客将shared_ptr,weak_ptr,enable_shared_form_this的源码实现整理了一遍,想着cpp智能指针还差个unique_ptr故写下此篇博客,以供学习 源码剖析 一,模板参数 首先,我们先看unique_ptr的模板参数,第一个参数_TP自是不用说表示对象类型,第二个模板参数定义了unique_p…...
)
Unity中的的文件夹(特殊文件夹)
Unity中的的文件夹(特殊文件夹) Unity工程中的关键文件夹和路径知识点, 以下是对Unity工程中几个关键文件夹和路径的总结: 1. 工程路径获取 print(Application.dataPath) 用途:通常只在编辑模式下使用。注意事项:游戏发布后࿰…...

Go语言定时器Timer和Ticker到底怎么用
原文链接,可获取更多Go语言学习资料 概述 在日常开发中,我们不可避免的需要使用到定时任务用来处理业务逻辑。在Go语言中内置的有两个定时器,Timer和Ticker,合理的使用这两个定时器可以很好的解决定时任务的需求,同时…...

41、web基础和http协议
web基础与http协议 一、web web:就是我们所说得页面,打开网页展示得页面。(全球广域网,万维网) world wide webwww 分布式图形信息系统 http:超文本传输协议 https:加密的超文本传输协议…...

6-173 二分查找的关键字比较次数
6-173 二分查找的关键字比较次数 - (32)专科段数据结构专项练习(2024版) (pintia.cn) int CountSearchTimes(int a[], int low, int high, int x) {int time0;while(low < high){int mid(lowhigh)/2;time;if(a[mid]x)return t…...

【基础篇】第5章 Elasticsearch 数据聚合与分析
在Elasticsearch的庞大功能体系中,数据聚合与分析扮演着至关重要的角色,它使我们能够从海量数据中提炼出有价值的信息,为决策提供依据。本章将深入探讨Elasticsearch的聚合功能,从基本概念到常见类型的实践,让你掌握如…...
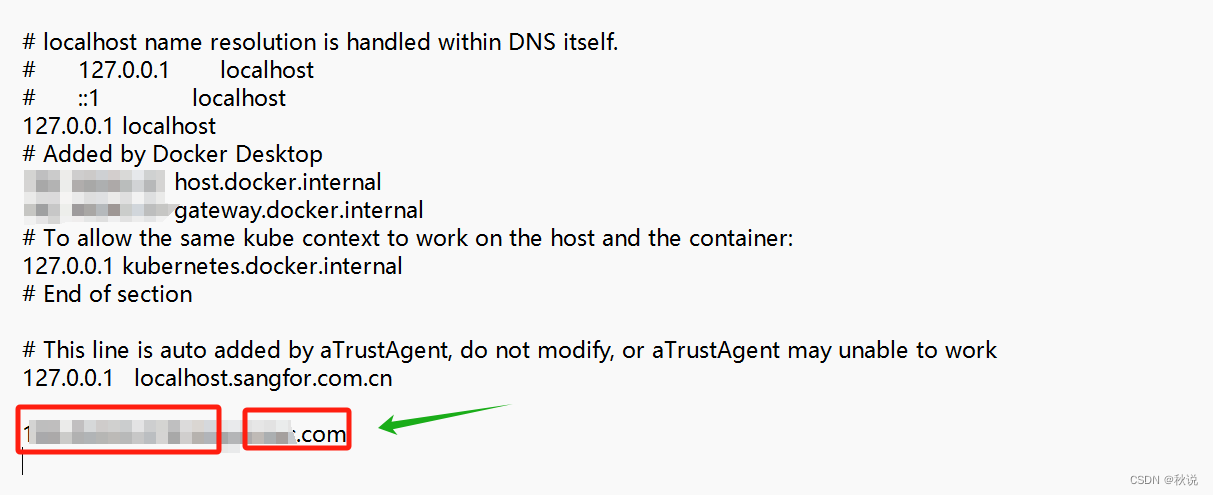
【网络安全】修改Host文件实现域名解析
场景 开发一个网站或者服务,需要在本地测试时,可以将线上的域名指向本地开发环境的IP地址。从而模拟真实环境中的域名访问,方便调试和开发。 步骤 1、以管理员身份打开命令提示符 2、编辑hosts文件: 输入以下命令打开hosts文…...

Spring Boot 全面解析:从入门到实践案例
引言: Spring Boot 是由 Pivotal 团队提供的全新框架,旨在简化 Spring 应用的初始搭建以及开发过程。它基于 Spring 平台,通过“约定优于配置”的原则,尽可能自动化配置,减少XML配置,使得开发者能够快速启…...

222222222
2222222...

Boost 智能指针
scoped_ptr 不能被复制或赋值给其他 scoped_ptr 对象,不能与其他指针比较 (除了 nullptr) scoped_ptr 用例 template <typename T> class scoped_ptr { public:// 构造函数:初始化 scoped_ptr 并接管指针的所有权explicit scoped_ptr(T* ptr n…...
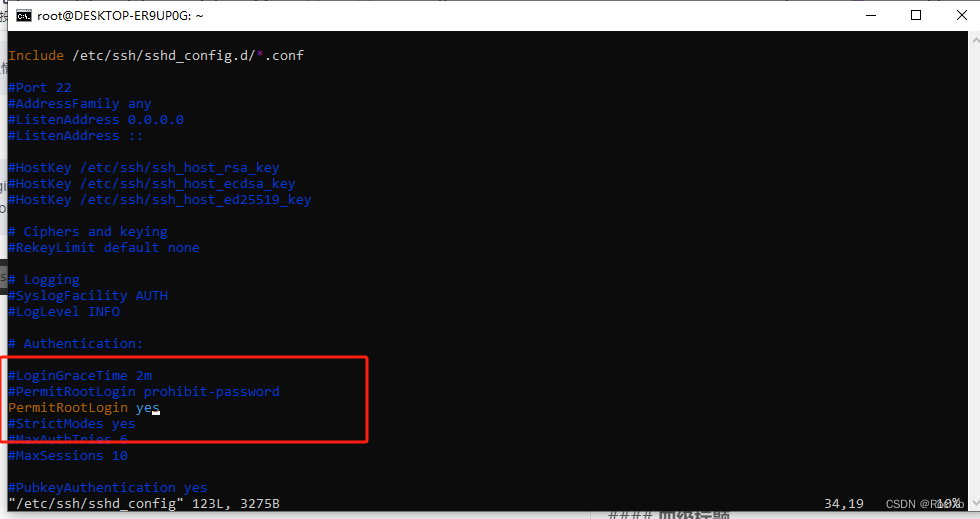
在WSL Ubuntu中启用root用户的SSH服务
在 Ubuntu 中,默认情况下 root 用户是禁用 SSH 登录的,这是为了增加系统安全性。 一、修改配置 找到 PermitRootLogin 行:在文件中找到 PermitRootLogin 配置项。默认情况下,它通常被设置为 PermitRootLogin prohibit-password 或…...
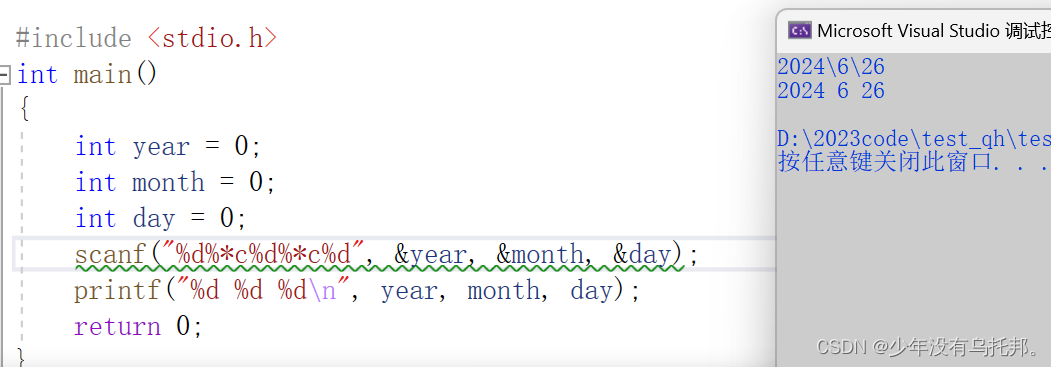
C语⾔数据类型和变量
C语⾔数据类型和变量 1.数据类型介绍1.1 字符型1.2 整型1.3 浮点型1.4 布尔类型1.5 各种数据类型的长度1.5.1 sizeof操作符1.5.2 数据类型长度1.5.3 sizeof中表达式不计算 2. signed 和 unsigned3. 数据类型的取值范围4. 变量4.1 变量的创建4.2 变量的分类 5. 算术操作符&#…...
Windows 11任务栏透明化神器:TranslucentTB让你的桌面焕然一新!
Windows 11任务栏透明化神器:TranslucentTB让你的桌面焕然一新! 【免费下载链接】TranslucentTB A lightweight utility that makes the Windows taskbar translucent/transparent. 项目地址: https://gitcode.com/gh_mirrors/tr/TranslucentTB 你…...

智能网联单轨捷运编组协同控制【附仿真】
✨ 长期致力于跨座式单轨车辆、单轨捷运系统、智能编组运行、协同避撞、协同控制研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)融合车距与速度的多层…...

AI应用治理平台ZLAR:从网关到统一架构的演进与实践
1. 项目概述:从单一工具到统一平台的演进最近在折腾AI应用开发,特别是涉及到多模型调用、安全审计和策略执行这块,发现很多开源项目都是“各自为政”。比如,你需要一个网关来管理AI模型的访问,又需要一个独立的日志系统…...
原理与应用全解析)
时序电路的心脏:钟控触发器(RS/D/JK/T)原理与应用全解析
1. 时序电路的心脏:为什么需要钟控触发器? 第一次接触数字电路时,我被各种触发器绕得头晕。直到老师用"心脏"来比喻钟控触发器,才恍然大悟——就像心脏通过规律跳动为全身供血一样,钟控触发器通过时钟脉冲协…...

基于MCP协议与Playwright构建AI浏览器自动化服务器
1. 项目概述:当AI助手学会“动手”,一个浏览器自动化MCP服务器的诞生如果你和我一样,日常重度依赖Claude、Cursor这类AI编程助手,那你肯定遇到过这样的场景:你正和AI热烈地讨论一个技术方案,突然需要它帮你…...

Audacity音频编辑完全手册:从零开始制作专业音频作品
Audacity音频编辑完全手册:从零开始制作专业音频作品 【免费下载链接】audacity Audio Editor 项目地址: https://gitcode.com/GitHub_Trending/au/audacity 想制作播客却不知道如何剪辑?需要为视频添加背景音乐但找不到合适的工具?或…...

FastDFS整合Nginx踩坑记:升级1.22.0修复CVE-2021-23017,如何平滑保留模块不报错?
FastDFS整合Nginx安全升级实战:从漏洞修复到模块兼容的全流程指南 最近在维护一个使用FastDFS作为分布式存储的生产环境时,遇到了Nginx的CVE-2021-23017安全漏洞问题。这个漏洞可能允许攻击者通过特制的DNS响应导致工作进程崩溃,对于线上业务…...

Elasticsearch管理利器:es-client全方位指南与实战技巧
Elasticsearch管理利器:es-client全方位指南与实战技巧 【免费下载链接】es-client elasticsearch客户端,issue请前往码云:https://gitee.com/qiaoshengda/es-client 项目地址: https://gitcode.com/gh_mirrors/es/es-client 你是否曾…...

HoRain云--Lua协程
🎬 HoRain云小助手:个人主页 🔥 个人专栏: 《Linux 系列教程》《c语言教程》 ⛺️生活的理想,就是为了理想的生活! ⛳️ 推荐 前些天发现了一个超棒的服务器购买网站,性价比超高,大内存超划算!…...

WPF老鸟的Avalonia初体验:用VS2022+Ubuntu虚拟机,从零到发布Linux安装包
WPF开发者实战Avalonia跨平台:VS2022Ubuntu全流程指南 当微软宣布.NET跨平台战略时,许多WPF开发者都看到了将桌面应用扩展到Linux和macOS的可能性。作为一个长期依赖WPF构建企业级应用的开发者,我第一次接触Avalonia时,最惊讶的是…...