经典的卷积神经网络模型 - ResNet
经典的卷积神经网络模型 - ResNet
flyfish
2015年,何恺明(Kaiming He)等人在论文《Deep Residual Learning for Image Recognition》中提出了ResNet(Residual Network,残差网络)。在当时,随着深度神经网络层数的增加,训练变得越来越困难,主要问题是梯度消失和梯度爆炸现象。即使使用各种优化技术和正则化方法,深层网络的表现仍然不如浅层网络。ResNet通过引入残差块(Residual Block)有效解决了这个问题,使得网络层数可以大幅度增加,同时还能显著提升模型的表现。
经典的卷积神经网络模型 - AlexNet
经典的卷积神经网络模型 - VGGNet
卷积层的输出
1x1卷积的作用
2. 残差(Residual)
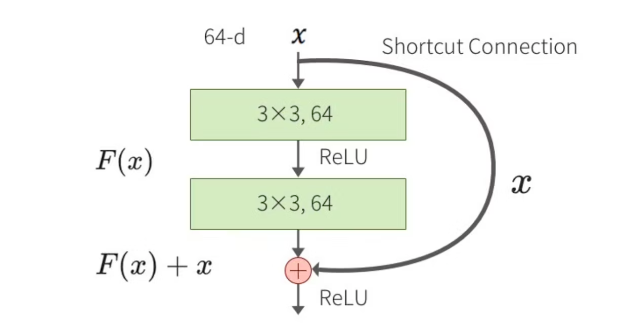
在ResNet中,残差指的是输入值与输出值之间的差值。具体来说,假设输入为 x x x,经过一系列变换后的输出为 F ( x ) F(x) F(x),ResNet引入了一条“快捷连接”(shortcut connection),直接将输入 x x x加入到输出 F ( x ) F(x) F(x),最终的输出为 H ( x ) = F ( x ) + x H(x) = F(x) + x H(x)=F(x)+x。这种结构称为残差块(Residual Block)。
3. ResNet的不同版本
ResNet有多个不同版本,后面的数字表示网络层的数量。具体来说:
- ResNet18: 18层
- ResNet34: 34层
- ResNet50: 50层
- ResNet101: 101层
- ResNet152: 152层
4. 常规残差模块
常规残差模块(Residual Block)包含两个3x3卷积层,每个卷积层后面跟着批归一化(Batch Normalization)和ReLU激活函数。假设输入为 x x x,经过第一层卷积、批归一化和ReLU后的输出为 F 1 ( x ) F_1(x) F1(x),再经过第二层卷积、批归一化后的输出为 F 2 ( F 1 ( x ) ) F_2(F_1(x)) F2(F1(x))。最终的输出是输入 x x x和 F 2 ( F 1 ( x ) ) F_2(F_1(x)) F2(F1(x))的和,即 H ( x ) = F ( x ) + x H(x) = F(x) + x H(x)=F(x)+x。
ResNet-18和ResNet-34使用的是BasicBlock。
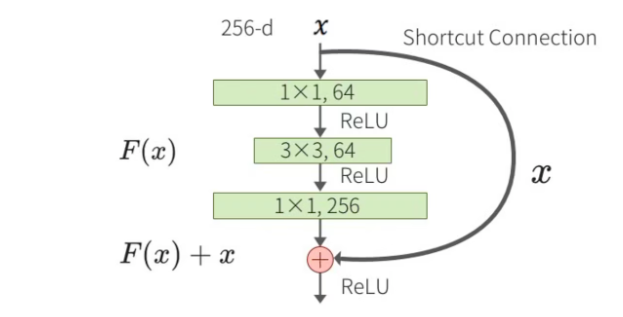
5. 瓶颈残差模块(Bottleneck Residual Block)
瓶颈残差模块用于更深的ResNet版本(如ResNet50及以上),目的是减少计算量和参数量。瓶颈残差模块包含三个卷积层:一个1x1卷积层用于降维,一个3x3卷积层用于特征提取,最后一个1x1卷积层用于升维。假设输入为 x x x,经过1x1卷积降维后的输出为 F 1 ( x ) F_1(x) F1(x),再经过3x3卷积后的输出为 F 2 ( F 1 ( x ) ) F_2(F_1(x)) F2(F1(x)),最后经过1x1卷积升维后的输出为 F 3 ( F 2 ( F 1 ( x ) ) ) F_3(F_2(F_1(x))) F3(F2(F1(x)))。最终的输出是输入 x x x和 F 3 ( F 2 ( F 1 ( x ) ) ) F_3(F_2(F_1(x))) F3(F2(F1(x)))的和,即 H ( x ) = F ( x ) + x H(x) = F(x) + x H(x)=F(x)+x。ResNet-50、ResNet-101和ResNet-152使用的是Bottleneck。
6. 快捷连接(shortcut connection )
快捷连接(shortcut connection),即直接将输入 x x x加到输出 F ( x ) F(x) F(x)上,从而避免了梯度消失和梯度爆炸问题。
import torchvision.models as models
resnet18 = models.resnet18()
print(resnet18)
ResNet((conv1): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3), bias=False)(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace=True)(maxpool): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False)(layer1): Sequential((0): BasicBlock((conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace=True)(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True))(1): BasicBlock((conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace=True)(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)))(layer2): Sequential((0): BasicBlock((conv1): Conv2d(64, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace=True)(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(downsample): Sequential((0): Conv2d(64, 128, kernel_size=(1, 1), stride=(2, 2), bias=False)(1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)))(1): BasicBlock((conv1): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace=True)(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)))(layer3): Sequential((0): BasicBlock((conv1): Conv2d(128, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace=True)(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(downsample): Sequential((0): Conv2d(128, 256, kernel_size=(1, 1), stride=(2, 2), bias=False)(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)))(1): BasicBlock((conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace=True)(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)))(layer4): Sequential((0): BasicBlock((conv1): Conv2d(256, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace=True)(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(downsample): Sequential((0): Conv2d(256, 512, kernel_size=(1, 1), stride=(2, 2), bias=False)(1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)))(1): BasicBlock((conv1): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace=True)(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)))(avgpool): AdaptiveAvgPool2d(output_size=(1, 1))(fc): Linear(in_features=512, out_features=1000, bias=True)
)
自定义实现ResNet-18
import torch
import torch.nn as nn
import torch.nn.functional as Fclass BasicBlock(nn.Module):expansion = 1def __init__(self, in_channels, out_channels, stride=1):super(BasicBlock, self).__init__()self.conv1 = nn.Conv2d(in_channels, out_channels, kernel_size=3, stride=stride, padding=1, bias=False)self.bn1 = nn.BatchNorm2d(out_channels)self.relu = nn.ReLU(inplace=True)self.conv2 = nn.Conv2d(out_channels, out_channels, kernel_size=3, stride=1, padding=1, bias=False)self.bn2 = nn.BatchNorm2d(out_channels)self.shortcut = nn.Sequential()if stride != 1 or in_channels != self.expansion * out_channels:self.shortcut = nn.Sequential(nn.Conv2d(in_channels, self.expansion * out_channels, kernel_size=1, stride=stride, bias=False),nn.BatchNorm2d(self.expansion * out_channels))def forward(self, x):out = self.relu(self.bn1(self.conv1(x)))out = self.bn2(self.conv2(out))out += self.shortcut(x)out = self.relu(out)return outclass ResNet(nn.Module):def __init__(self, block, num_blocks, num_classes=1000):super(ResNet, self).__init__()self.in_channels = 64self.conv1 = nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3, bias=False)self.bn1 = nn.BatchNorm2d(64)self.relu = nn.ReLU(inplace=True)self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)self.layer1 = self._make_layer(block, 64, num_blocks[0], stride=1)self.layer2 = self._make_layer(block, 128, num_blocks[1], stride=2)self.layer3 = self._make_layer(block, 256, num_blocks[2], stride=2)self.layer4 = self._make_layer(block, 512, num_blocks[3], stride=2)self.avgpool = nn.AdaptiveAvgPool2d((1, 1))self.fc = nn.Linear(512 * block.expansion, num_classes)def _make_layer(self, block, out_channels, num_blocks, stride):layers = []layers.append(block(self.in_channels, out_channels, stride))self.in_channels = out_channels * block.expansionfor _ in range(1, num_blocks):layers.append(block(self.in_channels, out_channels))return nn.Sequential(*layers)def forward(self, x):x = self.relu(self.bn1(self.conv1(x)))x = self.maxpool(x)x = self.layer1(x)x = self.layer2(x)x = self.layer3(x)x = self.layer4(x)x = self.avgpool(x)x = torch.flatten(x, 1)x = self.fc(x)return xdef resnet18(num_classes=1000):return ResNet(BasicBlock, [2, 2, 2, 2], num_classes)# Example usage
model = resnet18()
print(model)
自定义实现ResNet-18、ResNet-34、ResNet-50、ResNet-101和ResNet-152
ResNet-18和ResNet-34使用的是BasicBlock,而ResNet-50、ResNet-101和ResNet-152使用的是Bottleneck。
import torch
import torch.nn as nn
import torch.nn.functional as Fclass BasicBlock(nn.Module):expansion = 1def __init__(self, in_channels, out_channels, stride=1):super(BasicBlock, self).__init__()self.conv1 = nn.Conv2d(in_channels, out_channels, kernel_size=3, stride=stride, padding=1, bias=False)self.bn1 = nn.BatchNorm2d(out_channels)self.relu = nn.ReLU(inplace=True)self.conv2 = nn.Conv2d(out_channels, out_channels, kernel_size=3, stride=1, padding=1, bias=False)self.bn2 = nn.BatchNorm2d(out_channels)self.shortcut = nn.Sequential()if stride != 1 or in_channels != self.expansion * out_channels:self.shortcut = nn.Sequential(nn.Conv2d(in_channels, self.expansion * out_channels, kernel_size=1, stride=stride, bias=False),nn.BatchNorm2d(self.expansion * out_channels))def forward(self, x):out = self.relu(self.bn1(self.conv1(x)))out = self.bn2(self.conv2(out))out += self.shortcut(x)out = self.relu(out)return outclass Bottleneck(nn.Module):expansion = 4def __init__(self, in_channels, out_channels, stride=1):super(Bottleneck, self).__init__()self.conv1 = nn.Conv2d(in_channels, out_channels, kernel_size=1, bias=False)self.bn1 = nn.BatchNorm2d(out_channels)self.conv2 = nn.Conv2d(out_channels, out_channels, kernel_size=3, stride=stride, padding=1, bias=False)self.bn2 = nn.BatchNorm2d(out_channels)self.conv3 = nn.Conv2d(out_channels, out_channels * self.expansion, kernel_size=1, bias=False)self.bn3 = nn.BatchNorm2d(out_channels * self.expansion)self.relu = nn.ReLU(inplace=True)self.shortcut = nn.Sequential()if stride != 1 or in_channels != out_channels * self.expansion:self.shortcut = nn.Sequential(nn.Conv2d(in_channels, out_channels * self.expansion, kernel_size=1, stride=stride, bias=False),nn.BatchNorm2d(out_channels * self.expansion))def forward(self, x):out = self.relu(self.bn1(self.conv1(x)))out = self.relu(self.bn2(self.conv2(out)))out = self.bn3(self.conv3(out))out += self.shortcut(x)out = self.relu(out)return outclass ResNet(nn.Module):def __init__(self, block, num_blocks, num_classes=1000):super(ResNet, self).__init__()self.in_channels = 64self.conv1 = nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3, bias=False)self.bn1 = nn.BatchNorm2d(64)self.relu = nn.ReLU(inplace=True)self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)self.layer1 = self._make_layer(block, 64, num_blocks[0], stride=1)self.layer2 = self._make_layer(block, 128, num_blocks[1], stride=2)self.layer3 = self._make_layer(block, 256, num_blocks[2], stride=2)self.layer4 = self._make_layer(block, 512, num_blocks[3], stride=2)self.avgpool = nn.AdaptiveAvgPool2d((1, 1))self.fc = nn.Linear(512 * block.expansion, num_classes)def _make_layer(self, block, out_channels, num_blocks, stride):layers = []layers.append(block(self.in_channels, out_channels, stride))self.in_channels = out_channels * block.expansionfor _ in range(1, num_blocks):layers.append(block(self.in_channels, out_channels))return nn.Sequential(*layers)def forward(self, x):x = self.relu(self.bn1(self.conv1(x)))x = self.maxpool(x)x = self.layer1(x)x = self.layer2(x)x = self.layer3(x)x = self.layer4(x)x = self.avgpool(x)x = torch.flatten(x, 1)x = self.fc(x)return xdef resnet18(num_classes=1000):return ResNet(BasicBlock, [2, 2, 2, 2], num_classes)def resnet34(num_classes=1000):return ResNet(BasicBlock, [3, 4, 6, 3], num_classes)def resnet50(num_classes=1000):return ResNet(Bottleneck, [3, 4, 6, 3], num_classes)def resnet101(num_classes=1000):return ResNet(Bottleneck, [3, 4, 23, 3], num_classes)def resnet152(num_classes=1000):return ResNet(Bottleneck, [3, 8, 36, 3], num_classes)# Example usage
model_18 = resnet18()
model_34 = resnet34()
model_50 = resnet50()
model_101 = resnet101()
model_152 = resnet152()print(model_18)
print(model_34)
print(model_50)
print(model_101)
print(model_152)
网络结构
以ResNet18和ResNet50的结构举例
因为ResNet-18和ResNet-34使用的是BasicBlock,ResNet-50、ResNet-101和ResNet-152使用的是Bottleneck,可以区分看。
ResNet18
-
输入:224x224图像
-
卷积层:7x7卷积,64个过滤器,步长2
-
最大池化层:3x3,步长2
-
残差模块:
-
2个Basic Block,每个包含2个3x3卷积层(64个过滤器)
-
2个Basic Block,每个包含2个3x3卷积层(128个过滤器)
-
2个Basic Block,每个包含2个3x3卷积层(256个过滤器)
-
2个Basic Block,每个包含2个3x3卷积层(512个过滤器)
-
-
全局平均池化层
-
全连接层:1000个单元(对应ImageNet的1000个类别)
用参数表示就是 [2, 2, 2, 2]
ResNet50
-
输入:224x224图像
-
卷积层:7x7卷积,64个过滤器,步长2
-
最大池化层:3x3,步长2
-
残差模块:
-
3个Bottleneck Block,每个包含1x1降维、3x3卷积、1x1升维(256个过滤器)
-
4个Bottleneck Block,每个包含1x1降维、3x3卷积、1x1升维(512个过滤器)
-
6个Bottleneck Block,每个包含1x1降维、3x3卷积、1x1升维(1024个过滤器)
-
3个Bottleneck Block,每个包含1x1降维、3x3卷积、1x1升维(2048个过滤器)
-
-
全局平均池化层
-
全连接层:1000个单元(对应ImageNet的1000个类别)
用参数表示就是 [3, 4, 6, 3]
列表参数表示每个阶段(layer)中包含的残差块(residual block)的数量。ResNet的网络结构通常分为多个阶段,每个阶段包含多个残差块。这些残差块可以是常规的(BasicBlock)或瓶颈的(Bottleneck)。具体来说:
[2, 2, 2, 2] 表示第1个阶段有2个残差块,第2个阶段有2个残差块,第3个阶段有2个残差块,第4个阶段有2个残差块。
[3, 4, 6, 3] 表示第1个阶段有3个残差块,第2个阶段有4个残差块,第3个阶段有6个残差块,第4个阶段有3个残差块。
BasicBlock: 实现了常规残差模块,包含两个3x3的卷积层。用于ResNet-18和ResNet-34。
Bottleneck: 实现了瓶颈残差模块,包含一个1x1卷积层、一个3x3卷积层和另一个1x1卷积层。用于ResNet-50、ResNet-101和ResNet-152。
identity shortcut和projection shortcut
import torchvision.models as models
model = models.resnet50()
print(model)
完整内容自行打印看,这里主要说明 identity shortcut和projection shortcut
ResNet((conv1): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3), bias=False)(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace=True)(maxpool): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False)(layer1): Sequential((0): Bottleneck((conv1): Conv2d(64, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn3): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace=True)(downsample): Sequential((0): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)))(1): Bottleneck((conv1): Conv2d(256, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn3): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace=True))(2): Bottleneck((conv1): Conv2d(256, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn3): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace=True)))......
在 ResNet 中,identity shortcut 和 projection shortcut 主要出现在 Bottleneck 模块中。
- Identity Shortcut : 这是直接跳过层的快捷方式,输入直接添加到输出。通常在输入和输出维度相同时使用。在模型输出中可以看到,如
layer1的第1和第2个Bottleneck:
(1): Bottleneck((conv1): Conv2d(256, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn3): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace=True)
)
可以看到这里没有 downsample 层,所以输入和输出直接相加。
- Projection Shortcut : 这是使用卷积层调整维度的快捷方式,用于当输入和输出维度不同时。在模型输出中可以看到,如
layer1的第0个Bottleneck:
(0): Bottleneck((conv1): Conv2d(64, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn3): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace=True)(downsample): Sequential((0): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True))
)
这里有一个 downsample 层,通过卷积和批量归一化调整输入的维度以匹配输出。
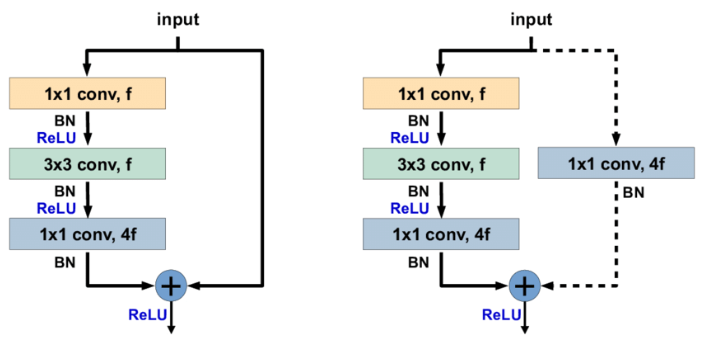
-
Identity Shortcut : 左侧图,没有
downsample层。如果要写上downsample也是(downsample): Sequential()括号里是空的 -
Projection Shortcut :右侧图 有
downsample层,用于调整维度。 比如
(downsample): Sequential((0): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True))
Bottleneck 结构中,f 通常表示瓶颈层的过滤器(或通道)数。
在 Bottleneck 模块中,通常有三层卷积:
第一个 1x1 卷积,用于降低维度,通道数是 f。
第二个 3x3 卷积,用于在降低维度的情况下进行卷积操作,通道数也是 f。
第三个 1x1 卷积,用于恢复维度,通道数是 4f。
如果要保证输出的特征图大小是固定的(如 1x1),自适应平均池化或者全局平均池化是最常用的选择;如果要调整通道数并保持空间结构,则可以用 1x1 卷积和池化的组合。
无论输入的特征图大小是多少,自适应平均池化都可以将其调整到一个指定的输出大小。在 ResNet 中使用的 AdaptiveAvgPool2d(output_size=(1, 1)) 会将输入的特征图调整到大小为 1x1。通过将特征图大小固定,可以更容易地设计网络结构,尤其是全连接层的输入部分。例如,将特征图调整到 1x1 后,后面的全连接层只需要处理固定数量的特征,不用考虑输入图像的大小变化。在特征图被调整到较小的大小(例如 1x1)后,随后的全连接层所需的参数和计算量会显著减少。
相关文章:
经典的卷积神经网络模型 - ResNet
经典的卷积神经网络模型 - ResNet flyfish 2015年,何恺明(Kaiming He)等人在论文《Deep Residual Learning for Image Recognition》中提出了ResNet(Residual Network,残差网络)。在当时,随着…...

【Git 学习笔记】1.3 Git 的三个阶段
1.3 Git 的三个阶段 由于远程代码库后续存在新的提交,因此实操过程中的结果与书中并不完全一致。根据书中 HEAD 指向的 SHA-1:34acc370b4d6ae53f051255680feaefaf7f7850d,可通过以下命令切换到对应版本,并新建一个 newdemo 分支来…...

华为DCN之:SDN和NFV
1. SDN概述 1.1 SDN的起源 SDN(Software Defined Network)即软件定义网络。是由斯坦福大学Clean Slate研究组提出的一种新型网络创新架构。其核心理念通过将网络设备控制平面与数据平面分离,从而实现了网络控制平面的集中控制,为…...
黑马头条-数据管理平台
目录 项目准备 验证码登录 验证码登录-流程 token 的介绍 个人信息设置和 axios 请求拦截器 axios 响应拦截器和身份验证失败 优化-axios 响应结果 发布文章-富文本编辑器 项目准备 技术: • 基于 Bootstrap 搭建网站标签和样式 • 集成 wangEditor 插件…...

API Object设计模式
API测试面临的问题 API测试由于编写简单,以及较高的稳定性,许多公司都以不同工具和框架维护API自动化测试。我们基于seldom框架也积累了几千条自动化用例。 •简单的用例 import seldomclass TestRequest(seldom.TestCase):def test_post_method(self…...

Python 爬虫:多进程,多线程爬虫<提高爬取效率>
关于多进程,多线程的知识,请自行查询资料补充 ~~~~~~~~~~~ 使用多进程: 在python中,使用多进程需要先导包: from threding import Threaddef work(name):for i in range(1000):print(f"我是线程:{n…...
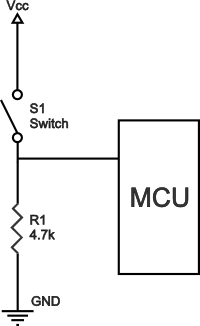
什么是上拉电阻器?上拉和下拉电阻的典型应用
什么是上拉电阻器? 上拉电阻是逻辑电路中使用的电阻,用于确保引脚在所有条件下具有明确定义的逻辑电平。提醒一下,数字逻辑电路有三种逻辑状态:高、低和浮动(或高阻抗)。当引脚未被拉至高或低逻辑电平&…...

centos7安装python3.10
文章目录 1. 安装依赖项2. 下载Python 3.10源码3. 解压源码并进入目录4. 配置安装选项5. 编译并安装Python6. 验证安装7.创建软连接8. 安装pip39. 换源 1. 安装依赖项 sudo yum groupinstall -y "Development Tools" sudo yum install -y openssl-devel bzip2-devel…...

QT事件处理及实例(鼠标事件、键盘事件、事件过滤)
这篇文章通过鼠标事件、键盘事件和事件过滤的三个实例介绍事件处理的实现。 鼠标事件及实例 鼠标事件包括鼠标的移动、按下、松开、单击和双击等。 创建一个MouseEvent项目,通过项目介绍如何获得和处理鼠标事件。程序效果如下图所示。 界面布局代码如下ÿ…...

职场新人必备待办工具 高效待办工作更省心
作为一名初入职场的菜鸟,我曾被繁琐的工作任务压得喘不过气。每天,邮件、会议、项目任务像潮水般涌来,我常常感到力不从心,生怕遗漏了什么重要事项。那种焦虑,就像站在人来人往的地铁站,却不知道自己该搭乘…...

【创作纪念日】我的CSDN1024创作纪念
机缘 注册CSDN是很长时间了,但是上学时因为专业是电气工程,与编程打交道比较少,一直都是寻求帮助,而非内容输出。直到考研后专业改变,成为了主要跟软件编程、计算机知识相关的研究后,才逐步开启自己的CSDN…...
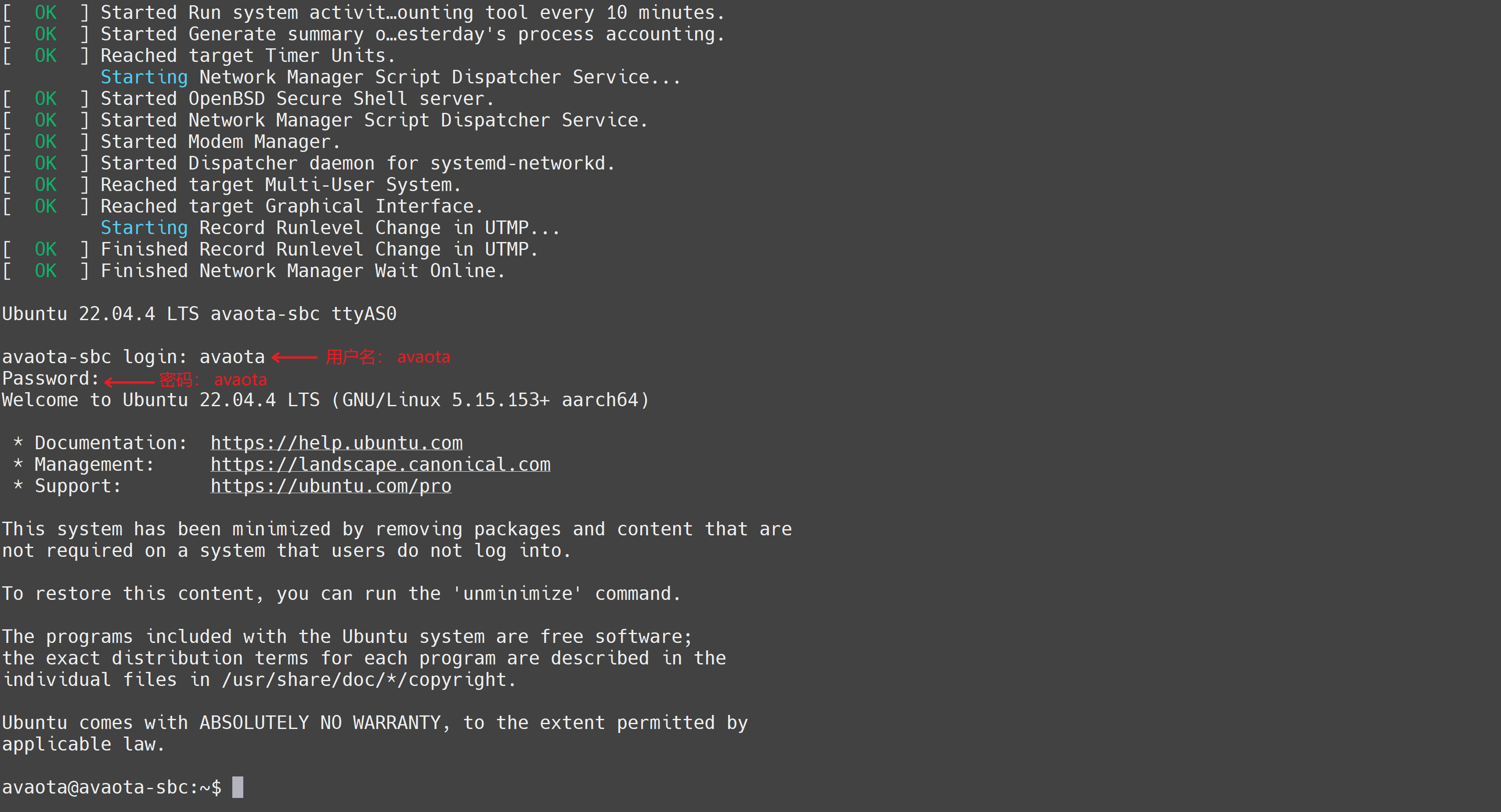
在AvaotaA1全志T527开发板上使用 UART 连接开发板
连接开发板 AvaotaA1提供两种连接串口输出方式,因为AvaotaA1需要DC 12V/2A/5.5-2.1电源适配器才可以启动系统,请先确保电源已接通。 方式一: 使用配套的 TyepC-SUB 转接板 40Gbps雷电线标准TypeC数据线,就可以同步实现 USB 串口…...

【Asterinas】Asterinas 进程启动与切换
Asterinas 进程启动与切换 进程启动 进程创建: Rust pub fn spawn_user_process( executable_path: &str, argv: Vec, envp: Vec, ) -> Result<Arc> { // spawn user process should give an absolute path debug_assert!(executable_path.starts_with…...
CVE-2024-6387 分析
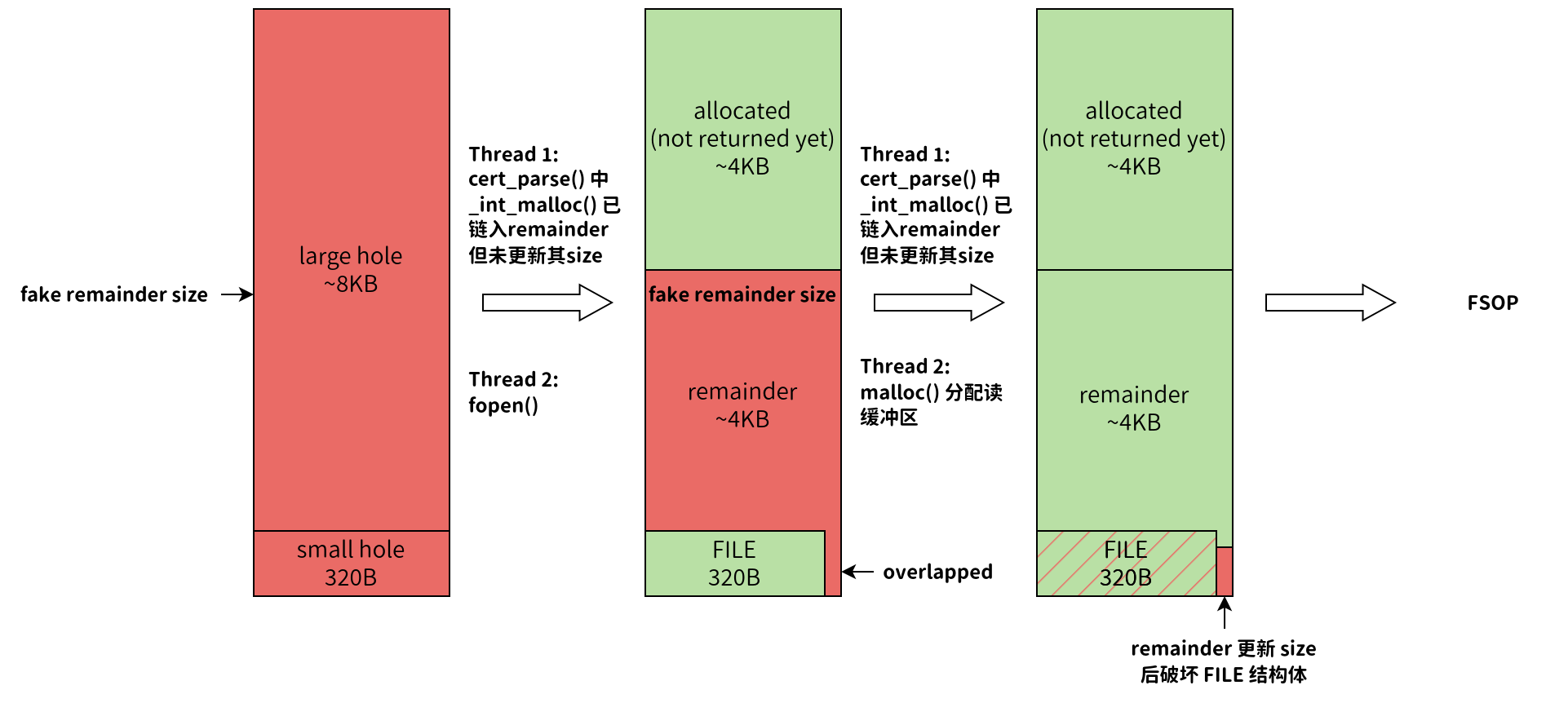
文章目录 1. 漏洞成因2. 漏洞利用前置知识2.1 相关 SSH 协议报文格式2.2 Glibc 内存分配相关规则 3. POC3.1 堆内存布局3.2 服务端解析数据时间测量3.3 条件竞争3.4 FSOP 4. 相关挑战 原文链接:个人博客 近几天,OpenSSH爆出了一个非常严重的安全漏洞&am…...
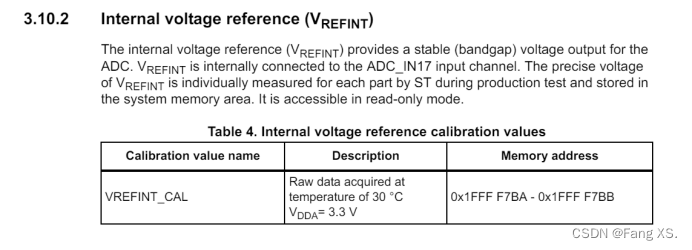
STM32 ADC精度提升方法
STM32 ADC精度提升方法 Fang XS.1452512966qq.com如果有错误,希望被指出,学习技术的路难免会磕磕绊绊量的积累引起质的变化 硬件方法 优化布局布线,尽量减小其他干扰增加电源、Vref去耦电容使用低通滤波器,或加磁珠使用DCDC时尽…...
Redis为什么设计多个数据库
关于Redis的知识前面已经介绍过很多了,但有个点没有讲,那就是一个Redis的实例并不是只有一个数据库,一般情况下,默认是Databases 0。 一 内部结构 设计如下: Redis 的源码中定义了 redisDb 结构体来表示单个数据库。这个结构有若干重要字段,比如: dict:该字段存储了…...
零基础学习MySQL---MySQL入门
顾得泉:个人主页 个人专栏:《Linux操作系统》 《C从入门到精通》 《LeedCode刷题》 键盘敲烂,年薪百万! 一、什么是数据库 问:存储数据用文件就可以了,为什么还要弄个数据库呢? 这就不得不提…...
HUAWEI MPLS 静态配置和动态LDP配置
MPLS(Multi-Protocol Label Switching,多协议标签交换技术)技术的出现,极大地推动了互联网的发展和应用。例如:利用MPLS技术,可以有效而灵活地部署VPN(Virtual Private Network,虚拟专用网),TE(Traffic Eng…...

【Rust】——所有的模式语法
💻博主现有专栏: C51单片机(STC89C516),c语言,c,离散数学,算法设计与分析,数据结构,Python,Java基础,MySQL,linux…...

基于Python的求职招聘管理系统【附源码】
摘 要 随着互联网技术的不断发展,人类的生活已经逐渐离不开网络了,在未来的社会中,人类的生活与工作都离不开数字化、网络化、电子化与虚拟化的数字技术。从互联网的发展历史、当前的应用现状和发展趋势来看,我们完全可以肯定&…...

vscode里如何用git
打开vs终端执行如下: 1 初始化 Git 仓库(如果尚未初始化) git init 2 添加文件到 Git 仓库 git add . 3 使用 git commit 命令来提交你的更改。确保在提交时加上一个有用的消息。 git commit -m "备注信息" 4 …...

C++_核心编程_多态案例二-制作饮品
#include <iostream> #include <string> using namespace std;/*制作饮品的大致流程为:煮水 - 冲泡 - 倒入杯中 - 加入辅料 利用多态技术实现本案例,提供抽象制作饮品基类,提供子类制作咖啡和茶叶*//*基类*/ class AbstractDr…...
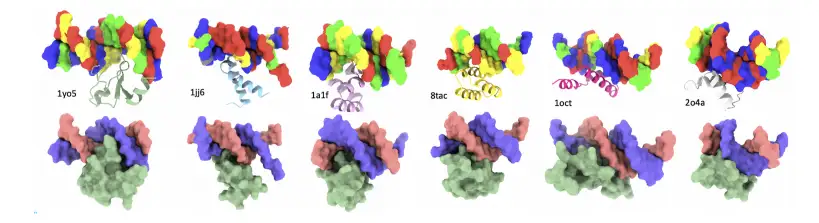
8k长序列建模,蛋白质语言模型Prot42仅利用目标蛋白序列即可生成高亲和力结合剂
蛋白质结合剂(如抗体、抑制肽)在疾病诊断、成像分析及靶向药物递送等关键场景中发挥着不可替代的作用。传统上,高特异性蛋白质结合剂的开发高度依赖噬菌体展示、定向进化等实验技术,但这类方法普遍面临资源消耗巨大、研发周期冗长…...
)
【位运算】消失的两个数字(hard)
消失的两个数字(hard) 题⽬描述:解法(位运算):Java 算法代码:更简便代码 题⽬链接:⾯试题 17.19. 消失的两个数字 题⽬描述: 给定⼀个数组,包含从 1 到 N 所有…...
从深圳崛起的“机器之眼”:赴港乐动机器人的万亿赛道赶考路
进入2025年以来,尽管围绕人形机器人、具身智能等机器人赛道的质疑声不断,但全球市场热度依然高涨,入局者持续增加。 以国内市场为例,天眼查专业版数据显示,截至5月底,我国现存在业、存续状态的机器人相关企…...
视频字幕质量评估的大规模细粒度基准
大家读完觉得有帮助记得关注和点赞!!! 摘要 视频字幕在文本到视频生成任务中起着至关重要的作用,因为它们的质量直接影响所生成视频的语义连贯性和视觉保真度。尽管大型视觉-语言模型(VLMs)在字幕生成方面…...

Java 二维码
Java 二维码 **技术:**谷歌 ZXing 实现 首先添加依赖 <!-- 二维码依赖 --><dependency><groupId>com.google.zxing</groupId><artifactId>core</artifactId><version>3.5.1</version></dependency><de…...
HDFS分布式存储 zookeeper
hadoop介绍 狭义上hadoop是指apache的一款开源软件 用java语言实现开源框架,允许使用简单的变成模型跨计算机对大型集群进行分布式处理(1.海量的数据存储 2.海量数据的计算)Hadoop核心组件 hdfs(分布式文件存储系统)&a…...
STM32HAL库USART源代码解析及应用
STM32HAL库USART源代码解析 前言STM32CubeIDE配置串口USART和UART的选择使用模式参数设置GPIO配置DMA配置中断配置硬件流控制使能生成代码解析和使用方法串口初始化__UART_HandleTypeDef结构体浅析HAL库代码实际使用方法使用轮询方式发送使用轮询方式接收使用中断方式发送使用中…...

Ubuntu Cursor升级成v1.0
0. 当前版本低 使用当前 Cursor v0.50时 GitHub Copilot Chat 打不开,快捷键也不好用,当看到 Cursor 升级后,还是蛮高兴的 1. 下载 Cursor 下载地址:https://www.cursor.com/cn/downloads 点击下载 Linux (x64) ,…...