异步电路后端实现流程(cdc signOff 后端做什么)
一种后端异步电路的signOff流程
同步电路和异步电路分别signOff
对于同步电路,后端会分析sta setup/hold,这里不在赘述。在该scenario下 异步电路是不会分析,也不会关注异步电路之间的走线
在cdc scenario(mode)下sdc有一下设置:
将所有同名的clk之间的path都设为falsePath
该scenario下不检查同步电路的sta
对所有不同名的clk 做双向的max_delay检查
设 有clk_a,clk_b;周期分别为period_a和period_b,则两者之间最小的周期为period_min_ab,做一下max_delay检查
set period [expr ${period_min_ab} * ${cdc_ratio}];#normally, we can set cdc_ratio=0.7
set_max_delay -from clk_a to clk_b ${period} -ignore_clock_latency
set_max_delay -from clk_b to clk_a ${period} -ignore_clock_latency以上约束的含义就是 对所有a to b和b to a的clk做两者之间快时钟周期的0.7倍 max_delay检查。
因为这是异步时钟域的检查,所以可以ignore 所有的clk latency。
那么就有两个问题:
为什么要做max_delay的检查
如果有不同名字的clk 原本是同步时钟域 该怎么办
如果有异步电路不能满足0.7倍的fastclk maxDelay检查该怎么办?
带着这些问题我们进入下一节。
cdc maxDelay的原因及relax
任何异步处理有三方面需要考虑
一、防止或减少不定态的出现和传播
二、保证功能的正确性
三、保证性能不受损失
这里首先介绍异步处理的几种常见电路
2级或以上的寄存器打拍(下面就以2级为例)
寄存器打拍本身不能保证captureCLK的capture数据是正确的,只能降低不定态传播,要求同步器内和launchLCK的寄存器都尽量靠近
要保证功能正确,就要求被同步的数据是准静态或静态数据,也就是说在电路中 可以保证只有在launchCLK数据稳定后,captureCLK才会使用(而不是稳定后才capture)这个数据。
有效信号握手同步,数据不做同步
握手信号的同步首先就需要2级同步器,其次握手本身可以保证数据同步过去是正确的,但是前提条件是在握手过程中,被同步数据不能改变。
多bit数据信号在后端尽量相同的布线
另一方面考虑握手越快越好,那就要求launch FF 和capture FF间maxDelay不要过大
grayCode做指针同步的异步FIFO
grayCode同步是需要nbit的2级同步器,同时要求在captureCLK capture时最多只有1bit数据在变化,其他bit位全部稳定。比如虽然grayCode在launchCLK是最多一个clk变化1bit,但是如果前后两个launchCLK的2个bit的变化经过不同的delay同时到达了captureCLK,那么在captureCLK看到的就是两个bit同时变化,这样AsyncFIFO的虚空虚满就不正常,会出现fifo中的数据被错误覆盖或错误使用。
另一方面,考虑性能不受影响 需要合理的设置异步fifo的深度
现在的经验是如果里面的指针同步使用2级同步器,AsyncFifo深度设置为8,使用3级同步器,AsyncFifo的深度设置为10.在分析深度保证不断流的最差情况,是假设读写频率相同 相位差接近1个Tclk。有时间再开贴分析。
多bitgrayCode指针信号在后端尽量相同的布线
2.1为什么要做maxDelay检查
maxDelay检查的总体要求是launch FF 和 capture FF的距离不要太远,整个Tco+走线延迟+组合路径延迟小于maxDelay设置的period, 这样capture clk的一个时钟周期内能够采样到变化的数据。
maxDelay保证了格雷码同步的要求,即在captureCLK采样时,只有1个bit是不稳定的
假设grayCode从fastclk clk_a同步到slow clk_b,考虑最恶劣情况,在clk_a中连续两个时钟clk_a(n-1)和clk_a(n)时刻分别有2bit发生了变化,由于设置了maxDelay为fastCLk的0.7倍,那么在采样clk_a(n)的bit变化时,clk_a(n-1)的变化早就已经稳定了至少0.3period(clk_a)的时间。所以此时采样虽然有2bit变化,但clk_a(n-1)的变化已经稳定,实际上最多只有最新的bit变化可能没被正确采样,但是由于AsyncFiFo的虚空虚满特性并不影响功能实际并不会出错。
同理可分析grayCode从slow clk_b同步到fast clk_a的情况。可以得到相同的结论,在任意captureCLK采样时刻,只有1bit是不稳定的,即使在两个captureCLK之间有多个bit的变化。
2.2 如果有不同名字的clk 原本是同步时钟域 该怎么办
如果clk_a0和clk_a1原本是同步时钟域,在cdc check时因为clk name不同而做了maxDelay的检查,如过clk_a0和clk_a1之间的maxDelay检查不能满足,那就要relax这种类型的检查,可以直接设
clk_a0 to clk_a1和clk_a1 to clk_a0的path为falsePath。
如果maxdelay检查没有问题,就无需关注。
2.3 如果有异步电路不能满足0.7倍的fastclk maxDelay检查该怎么办?
0.7倍的fastCLK周期 约束是相当严格的,很多情况下并不能满足,这时我们具体电路具体分析:
对于2级同步寄存器
由于本来就是对准静态和静态的信号同步,信号基本没有变化,所以Launch FF到capture的FF并没有很严格的maxDelay需求,此时可以设置falsePath或者放宽该条path的maxDelay period。
regArray的asyncFIFO的数据存储阵列reg_data_array
在launch clk写数据到reg_data_array,当读端通过地址指针grayCode同步后发现reg_data_array上不空时,可以在capture直接采样reg_data_array的输出。
这里面可以看出来,grayCode同步到读端至少需要2个Tcaptureclk,所以对reg_data_array的maxdelay就可以放松至1.5T_capture,如果是3拍同步器可以放松至2T_capture.
一些握手同步
有效信号先在clk_a打了一拍,在经过2级同步器同步到clk_b,再在clk_b打一拍,后使用。那么对应的data可以设置maxDelay为1T_launch+2T_capture+1ns。
这种常用在apbSync,nic里面的bridge的addr和data上。可以根据实际电路对这些cell进行relax
如果grayCode不能满足0.7 maxdelay
这种情况下 只能靠后端来修timing,这个是必须meet的,否则grayCode就没有意义了。
相关文章:
)
异步电路后端实现流程(cdc signOff 后端做什么)
一种后端异步电路的signOff流程同步电路和异步电路分别signOff对于同步电路,后端会分析sta setup/hold,这里不在赘述。在该scenario下 异步电路是不会分析,也不会关注异步电路之间的走线在cdc scenario(mode)下sdc有一下设置:将所…...

Linux网络编程实战介绍
文章目录 前言一、Linux网络编程介绍二、文章目录总结前言 本专栏将为大家讲解Linux网络编程的知识,本专栏只需要有C语言基础即可学习,学习本专栏将大大提高你的C语言水平,当然了我也还会在ARM板子上进行实验将Linux驱动也和网络编程联系起来,方便大家去实现自己的项目。我…...

C++概述 课堂笔记
函数的重载在C语言中函数名是唯一的,不可以重复定义,当我们利用函数执行,功能相似的函数,我们也不能使用同一个函数,比如说,求整型的函数,不能用来求浮点型、字符型。在C中引入函数重载的概念&a…...

一文读懂SpringBoot整合Elasticsearch(一)
(本篇文章主要介绍Spring Boot如何整合Elasticsearch,包括基本配置、数据操作、搜索功能等方面。) 一、前言 Elasticsearch是一款全文搜索引擎,可用于快速、准确地存储、搜索和分析大量数据。而Spring Boot是一款快速开发框架&a…...
(枚举)(前缀和)1230. K倍区间)
(数论)(枚举)(前缀和)1230. K倍区间
目录 题目链接 一些话 切入点 流程 套路 ac代码 题目链接 1230. K倍区间 - AcWing题库 ~数~啦!我草,又~在~水~字~数~啦!我草,又~在~水&…...

万字带你深入理解 Linux 虚拟内存管理(下)
接上文:万字带你深入理解 Linux 虚拟内存管理(上) 6. 程序编译后的二进制文件如何映射到虚拟内存空间中 经过前边这么多小节的内容介绍,现在我们已经熟悉了进程虚拟内存空间的布局,以及内核如何管理这些虚拟内存区域&…...

【iOS】—— JSONModel源码学习
JSONModel 文章目录JSONModel关于JSONModel的用法initWithDictionary等方法load方法实现load方法调用时机init方法__setup__方法__inspectProperties:方法__doesDictionary方法__importDictionary方法关于JSONModel的用法 可以参考之前写的博客:【iOS】—— JSONMo…...

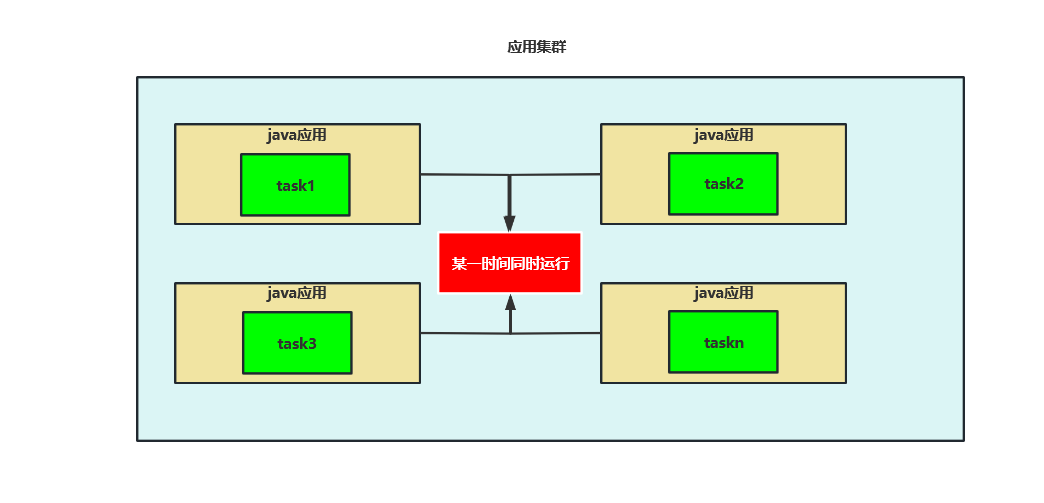
单片机怎么实现真正的多线程?
所谓多线程都是模拟的,本质都是单线程,因为cpu同一时刻只能执行一段代码。模拟的多线程就是任务之间快速切换,看起来像同时执行的样子。据说最近有多核的单片机,不过成本应该会高很多。对于模拟的多线程,我知道的有两种…...

【LeetCode】剑指 Offer(23)
目录 题目:剑指 Offer 46. 把数字翻译成字符串 - 力扣(Leetcode) 题目的接口: 解题思路: 代码: 过啦!!! 写在最后: 题目:剑指 Offer 46. 把…...

[免费专栏] 汽车威胁狩猎之不应该相信的几个威胁狩猎误区
也许每个人出生的时候都以为这世界都是为他一个人而存在的,当他发现自己错的时候,他便开始长大 少走了弯路,也就错过了风景,无论如何,感谢经历 汽车威胁狩猎专栏长期更新,本篇最新内容请前往: …...

LinuxFTP文件传输服务和DNS域名解析服务
♥️作者:小刘在C站 ♥️个人主页:小刘主页 ♥️每天分享云计算网络运维课堂笔记,努力不一定有收获,但一定会有收获加油!一起努力,共赴美好人生! ♥️夕阳下,是最美的绽放࿰…...

二叉搜索树原理及底层实现
二叉搜索树BST 概念 二叉搜索树又称二叉排序树,它可以是一棵空树,或者是具有以下性质的二叉树:若它的左子树不为空,则左子树上所有节点的值都小于根节点的值;若它的右子树不为空,则右子树上所有节点的值都…...
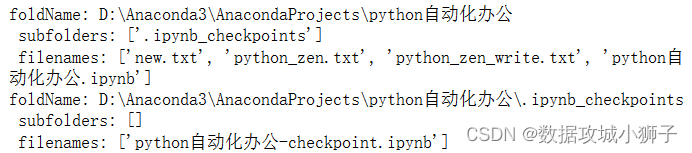
python自动化办公(一)
本文代码参考其他教程书籍实现。 文章目录文件读写open函数读取文本文件写入文本文件文件和目录操作使用os库使用shutil库文件读写 open函数 open函数有8个参数,常用前4个,除了file参数外,其他参数都有默认值。file指定了要打开的文件名称&a…...

LeetCode - 198 打家劫舍
目录 题目来源 题目描述 示例 提示 题目解析 算法源码 题目来源 198. 打家劫舍 - 力扣(LeetCode) 题目描述 你是一个专业的小偷,计划偷窃沿街的房屋。每间房内都藏有一定的现金,影响你偷窃的唯一制约因素就是相邻的房屋装…...
简单粗暴的分布式定时任务解决方案
分布式定时任务1.为什么需要定时任务?2.数据库实现分布式定时任务3.基于redis实现1.为什么需要定时任务? 因为有时候我们需要定时的执行一些操作,比如业务中产生的一些临时文件,临时文件不能立即删除,因为不清楚用户是…...

蓝桥杯第五天刷题
第一题:数的分解题目描述本题为填空题,只需要算出结果后,在代码中使用输出语句将所填结果输出即可。把 2019 分解成 3 个各不相同的正整数之和,并且要求每个正整数都不包含数字 2和 4,一共有多少种不同的分解方法&…...
Java数组的定义和使用(万字详解)
目录 编辑 一. 数组的基本概念 1、什么是数组 2、数组的创建及初始化 1、数组的创建 2、数组的初始化 3、数组的使用 (1)数组中元素访问 (3)遍历数组 二、数组是引用类型 1、初始JVM的内存分布 2、基本类型变量与引用类…...
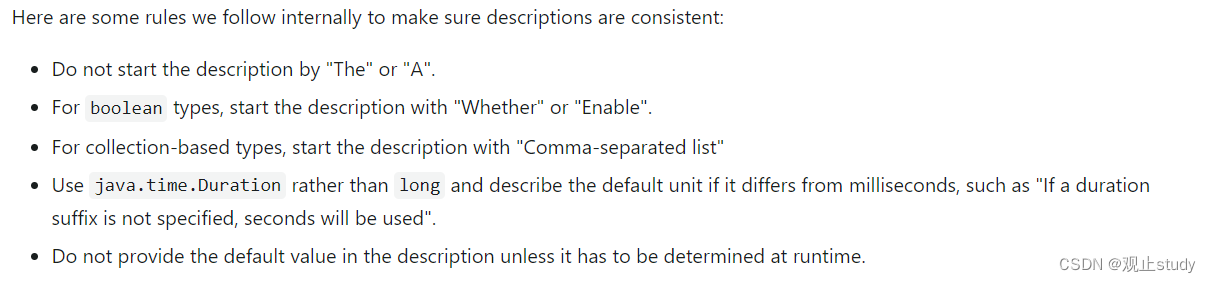
【SpringBoot】自定义Starter
🚩本文已收录至专栏:Spring家族学习之旅 👍希望您能有所收获 一.概述 在使用SpringBoot进行开发的时候,我们发现使用很多技术都是直接导入对应的starter,然后就实现了springboot整合对应技术,再加上一些简…...
【C陷阱与缺陷】----语法陷阱
💯💯💯 要理解一个C程序,必须理解这些程序是如何组成声明,表达式,语句的。虽然现在对C的语法定义很完善,几乎无懈可击,大门有时这些定义与人们的直觉相悖,或容易引起混淆…...

虹科分享| 关于TrueNAS十问十答
上一篇文章我们向您介绍了虹科新品HK-TrueNAS企业存储,很多小伙伴会疑问到底什么是NAS存储,之前常用的磁盘、磁带属于什么存储架构,NAS存储好在哪里,什么时候使用NAS?今天我们整理了关于TrueNAS的十问十答,…...

S32K3安全启动实战:从HSE固件安装到SMR配置的完整避坑指南
S32K3安全启动实战:从HSE固件安装到SMR配置的完整避坑指南 在嵌入式系统开发中,安全启动功能已成为保护设备固件完整性和防止未授权代码执行的关键防线。NXP S32K3系列微控制器通过硬件安全引擎(HSE)提供了强大的安全启动能力,但实际配置过程…...

Node.js服务端应用接入Taotoken调用大模型的完整代码示例
Node.js 服务端应用接入 Taotoken 调用大模型的完整代码示例 1. 环境准备与依赖安装 在开始编写 Node.js 服务端代码前,需要确保开发环境已安装 Node.js(建议版本 16 或更高)和 npm。创建一个新的项目目录并初始化: mkdir taot…...

多平台内容分发系统架构设计与实现思路 行业通用技术方案解析
前言从后端开发与系统架构设计视角来看,当下很多技术团队、自媒体工作室、企业运营部门,都有搭建多平台内容矩阵分发系统的需求。无论是技术博文跨平台同步、企业官方内容统一发布,还是垂直领域账号矩阵运维,本质上都需要一套标准…...
)
用立创EDA复刻蓝桥杯省赛真题电路:手把手搭建一个简易电压采集与显示系统(2022模拟题2)
用立创EDA复刻蓝桥杯省赛真题电路:手把手搭建一个简易电压采集与显示系统 在电子设计竞赛的备赛过程中,真题复现是最有效的实战训练方式之一。2022年蓝桥杯省赛模拟题中的电压采集与显示系统,融合了模拟信号处理、数字显示和存储等典型电路模…...

ClawHarness:自动化测试与任务编排框架的设计与实践
1. 项目概述:一个为“爪子”设计的“缰绳”如果你在开源社区里混迹过一段时间,肯定会发现一个有趣的现象:很多项目的名字都充满了隐喻和想象力。最近我注意到一个叫ClawHarness的项目,它的仓库名是lusipad/ClawHarness。初看这个名…...

Docker化Ollama部署指南:开箱即用的本地大模型服务方案
1. 项目概述:一个让Ollama“上手即用”的Docker镜像如果你最近在本地折腾过大语言模型,大概率听说过Ollama。它确实是个神器,把模型下载、加载、运行和API服务这些繁琐步骤打包成了一个简单的命令行工具,让在个人电脑上跑Llama、Q…...

JetBrains Godot开发工具套件:提升GDScript与C#游戏开发效率
1. 项目概述:JetBrains Godot 开发工具套件如果你是一名使用 Godot 引擎的游戏开发者,并且恰好也是 JetBrains 全家桶的忠实用户,那么你很可能已经对代码编辑体验的“割裂感”深有体会。一边是 Godot 内置编辑器对 GDScript 的原生友好&#…...
)
告别重新编译!WRF运行时动态添加输出变量的保姆级教程(附Registry查找技巧)
WRF运行时动态添加输出变量的高阶技巧与Registry高效检索指南 每次修改Registry后漫长的重新编译过程,是否已经成为你WRF工作流中的效率瓶颈?想象一下这样的场景:凌晨三点,台风模拟即将开始,合作方突然要求增加一组微物…...

Calcite-Cursors:开源跨平台光标主题的设计、构建与全平台部署指南
1. 项目概述:当光标遇见设计,Calcite-Cursors的诞生如果你和我一样,每天有超过8小时的时间与电脑屏幕为伴,那么光标——这个在屏幕上跳跃的小小指针,可能是你交互最频繁的视觉元素之一。然而,绝大多数操作系…...

基于MCP协议的自动化网络红队:八大数学模型赋能智能风险评估
1. 项目概述与核心价值如果你是一名安全工程师、威胁分析师,或者正在尝试将AI融入安全运营流程,那么你大概率和我一样,经历过这样的困境:面对海量的CVE公告、零散的威胁情报和复杂的网络拓扑,想要进行一次系统性的风险…...