智能无人机飞行控制系统:基于STM32的设计与实现(内附资料)
摘要
智能无人机的飞行控制系统是确保无人机安全、高效运行的核心。本文将探讨基于STM32微控制器的智能无人机飞行控制系统的设计与实现,包括系统架构、关键组件选择、控制算法开发以及代码实现。
1. 引言
智能无人机在军事侦察、物流配送、环境监测等多个领域展现出巨大潜力。STM32微控制器因其高性能、低成本和广泛的应用生态,成为智能无人机控制系统的首选平台。
2. 系统架构
智能无人机飞行控制系统主要包括以下几个部分:
- 传感器模块:用于收集无人机的飞行状态数据。
- 控制计算单元:基于STM32微控制器进行数据处理和控制决策。
- 执行器模块:根据控制指令调整无人机的飞行姿态。
- 通信模块:实现无人机与地面控制站的数据交换。
3. 关键组件选择
3.1 STM32微控制器
选择具备足够处理能力和丰富接口的STM32系列微控制器。
3.2 传感器套件
包括但不限于:
- 加速度计和陀螺仪(MEMS)
- 磁力计
- 气压计
- GPS模块
3.3 执行器
包括电机控制器和舵机。
3.4 通信模块
选择适合的无线通信模块,如Wi-Fi、蓝牙或LoRa。
4. 控制算法开发
4.1 数据融合算法
利用卡尔曼滤波等算法对传感器数据进行融合,获取准确的飞行状态。
4.2 PID控制算法
开发PID控制算法,实现对无人机飞行姿态的精确控制。
// 简化的PID控制函数示例
float PID_Compute(float setpoint, float input, PID_Params *params) {float error = setpoint - input;params->integral += error;params->output = (params->kp * error) + (params->ki * params->integral) + (params->kd * (error - params->last_error));params->last_error = error;return params->output;
}
5. 代码实现
以下是智能无人机飞行控制系统的部分代码实现。
#include "stm32f4xx_hal.h"
#include "sensor.h"
#include "pid.h"
#include "actuator.h"
#include "communication.h"// 假设的PID参数结构体
typedef struct {float kp, ki, kd;float integral, output, last_error;
} PID_Params;// 系统初始化
void System_Init() {// 初始化传感器Sensor_Init();// 初始化执行器Actuator_Init();// 初始化通信模块Communication_Init();
}// 主控制循环
void Control_Loop() {// 读取传感器数据Sensor_Data data = Sensor_Read();// PID控制计算PID_Params pid_params;pid_params.integral = 0;pid_params.output = PID_Compute(desired_altitude, data.altitude, &pid_params);// 根据PID输出调整执行器Actuator_SetThrottle(pid_params.output);
}int main(void) {HAL_Init();System_Init();while (1) {Control_Loop();// 处理其他任务,如通信、用户输入等}
}
6. 结论
本文详细介绍了基于STM32微控制器的智能无人机飞行控制系统的设计与实现。通过精心设计的系统架构、精确的控制算法和高效的代码实现,可以确保无人机的稳定飞行和灵活控制。
开发者可以根据实际应用需求,对控制系统进行进一步的优化和扩展,如增加视觉识别、自动避障等智能功能。
7. 进一步探索
- 探索更高级的控制算法,如自适应控制、非线性控制等。
- 研究无人机的自主决策和路径规划算法。
- 考虑无人机系统的安全性和隐私保护问题。
✅作者简介:热爱科研的嵌入式开发者,修心和技术同步精进
❤欢迎关注我的知乎:对error视而不见
代码获取、问题探讨及文章转载可私信。
☁ 愿你的生命中有够多的云翳,来造就一个美丽的黄昏。
🍎获取更多嵌入式资料可点击链接进群领取,谢谢支持!👇
点击领取更多详细资料
相关文章:
)
智能无人机飞行控制系统:基于STM32的设计与实现(内附资料)
摘要 智能无人机的飞行控制系统是确保无人机安全、高效运行的核心。本文将探讨基于STM32微控制器的智能无人机飞行控制系统的设计与实现,包括系统架构、关键组件选择、控制算法开发以及代码实现。 1. 引言 智能无人机在军事侦察、物流配送、环境监测等多个领域展…...

centos磁盘空间满了-问题解决
报错问题解释: CentOS系统在运行过程中可能会出现磁盘空间不足的错误。这通常发生在以下几种情况: 系统日志文件或临时文件过大导致磁盘空间不足。 安装了大量软件或文件而没有清理无用文件。 有可能是某个进程占用了大量磁盘空间。 问题解决方法&a…...

宝塔:如何开启面板ssl并更新过期ssl
1、登录宝塔面板 > 前往面板设置 > 最上方的安全设置 > 面板SSL > 面板SSL配置 打开后先查看自签证书的时间,如果时间是已经过期的,就前往这个目录,将该目录下所有文件都删掉 重新回到面板SSL配置的位置,打开后会看到…...

大白话讲解AI大模型
大白话讲解大模型 大模型的发展重要大模型发展时间线 大模型的简单原理-训练⼤模型是如何训练并应⽤到场景中的?如果训练私有化模型 模型:model 语料库:用于训练模型的数据 大模型的发展 详细信息来源:DataLearner 2022年11月底…...

pandas+pywin32操作excel办公自动化
import pandas as pd import re import win32com.client as win32 from win32com.client import constants import os import os.path as osp #读取表格 pathos.getcwd() fposp.join(path,fuck_demo.xlsx) dfpd.read_excel(fp,header1,usecols[序号,光缆段落名(A端…...

防火墙(ensp USG6000v)---安全策略 + 用户认证综合实验
一. 题目 1) 拓扑 2)要求 1. DMZ区内的服务器,办公区仅能在办公时间内(9:00 -- 18: 00)可以访问,生产区的设备全天可以访问 2.生产区不允许访问互联网,办公区和游客区允许访问互联网 3.办公区设备10.0.2.10不充许…...

Java使用POI导出后数字类型为常规类型,不能计算
今日日常撸码,甲方提出来excel导出后,数字类型那一列是常规类型,并不是数字,无法进行计算,如下图: 这里和导出的字段类型有关,我用的是POI进行excel的导出,需要在实体类上标注出需要…...

项目进度管理(5-1)常见的缓冲区监控方法
缓冲区监控是一种项目管理技术,主要用于关键链项目管理系统(Critical Chain Project Management, CCPM)中。它的核心理念是识别和管理项目中的不确定性和依赖性,以提高项目完成的可靠性。 缓冲区监控方法主要是针对项目进度计划执…...
)
构造函数语意学(The Semantics of Constructors)
1、“Default Constructor” 的构造操作 下面4种情况编译器会生成默认构造函数: 成员类对象带有默认构造函数父类带有默认构造函数带有虚表的类带有虚基类的类 1.1、 成员类对象带有默认构造函数 如果一个类没有任何构造函数,但它的一个成员对象带有…...

香橙派5plus上跑云手机方案二 waydroid
前言 上篇文章香橙派5plus上跑云手机方案一 redroid(带硬件加速)说了怎么跑带GPU加速的redroid方案,这篇说下怎么在香橙派下使用Waydroid。 温馨提示 虽然能运行,但是体验下来只能用软件加速,无法使用GPU加速,所有会很卡。而且…...
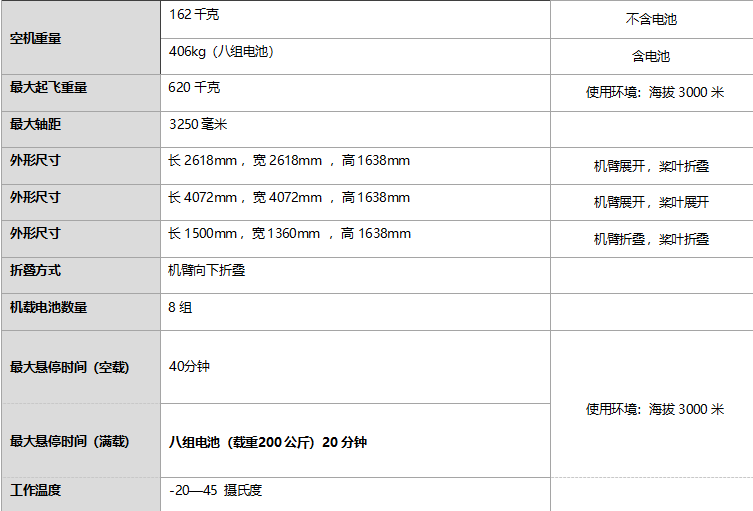
600Kg大载重起飞重量多旋翼无人机技术详解
600Kg大载重起飞重量的多旋翼无人机是一种高性能的无人驾驶旋翼飞行器,具有出色的载重能力和稳定的飞行特性。该无人机采用先进的飞行控制系统和高效的动力系统,能够满足各种复杂任务的需求,广泛应用于物资运输、应急救援、森林防火等领域。 …...

LlamaFactory可视化微调大模型 - 参数详解
LlamaFactory 前言 LLaMA Factory 是一个用于微调大型语言模型的强大工具,特别是针对 LLaMA 系列模型。 可以适应不同的模型架构和大小。 支持多种微调技术,如全参数微调、LoRA( Low-Rank Adaptation )、QLoRA( Quantized LoRA )等。 还给我们提供了简单实用的命令行…...

最新 Kubernetes 集群部署 + flannel 网络插件(保姆级教程,最新 K8S 版本)
资源列表 操作系统配置主机名IP所需插件CentOS 7.92C4Gk8s-master192.168.60.143flannel-cni-plugin、flannel、coredns、etcd、kube-apiserver、kube-controller-manager、kube-proxy、 kube-scheduler 、containerd、pause 、crictlCentOS 7.92C4Gk8s-node01192.168.60.144f…...

C语言笔记31 •单链表经典算法OJ题-3.反转链表•
反转链表 1.问题 给你单链表的头节点 head,请你反转链表,并返回反转后的链表。 2.代码实现: //3.反转链表 #define _CRT_SECURE_NO_WARNINGS 1 #include <stdio.h> #include <stdlib.h> #include <assert.h>typedef int …...

网桥与以太网交换机:功能与区别解析
在传统的共享式局域网中,所有站点共享一个公共的传输媒体。随着局域网规模的扩大、网络中站点数目的不断增加,这样的网络通信负载加重,网络效率急剧下降。随着技术的发展、交换技术的成熟和成本的降低,具有更高性能的交换式局域网…...

动态引用的艺术:在Postman中实现自动化的终极指南
🌀 动态引用的艺术:在Postman中实现自动化的终极指南 在API开发和测试中,Postman是一个强大的工具,它提供的动态引用功能可以帮助我们实现自动化和更高效的测试流程。本文将深入探讨如何在Postman中使用动态引用,通过…...

Qt:15.布局管理器(QVBoxLayout-垂直布局、QHBoxLayout-水平布局、QGridLayout-网格布局、拉伸系数,控制控件显示的大小)
目录 一、QVBoxLayout-垂直布局: 1.1QVBoxLayout介绍: 1.2 属性介绍: 1.3细节理解: 二、QHBoxLayout-水平布局: 三、QGridLayout-网格布局: 3.1QGridLayout介绍: 3.2常用方法:…...

图论---无向图中国邮路的实现
开始编程前分析设计思路和程序的整体的框架,以及作为数学问题的性质: 程序流程图: 数学原理: 本质上是找到一条欧拉回路,考虑图中的边权重、顶点的度数以及如何通过添加最少的额外边来构造欧拉回路,涉及到欧…...

Rockchip RK3588 - Rockchip Linux SDK脚本分析
---------------------------------------------------------------------------------------------------------------------------- 开发板 :ArmSoM-Sige7开发板eMMC :64GBLPDDR4 :8GB 显示屏 :15.6英寸HDMI接口显示屏u-boot &a…...

【C++中resize和reserve的区别】
1. resize的用法 改变当前容器内含有元素的数量(size())比如: vector<int> vct;int num vct.size();//之前的元素个数为num vct.resize(len);//现在的元素个数为len如果num < len ,那么容器vct新增len - num个元素&am…...

多模态2025:技术路线“神仙打架”,视频生成冲上云霄
文|魏琳华 编|王一粟 一场大会,聚集了中国多模态大模型的“半壁江山”。 智源大会2025为期两天的论坛中,汇集了学界、创业公司和大厂等三方的热门选手,关于多模态的集中讨论达到了前所未有的热度。其中,…...

k8s从入门到放弃之Ingress七层负载
k8s从入门到放弃之Ingress七层负载 在Kubernetes(简称K8s)中,Ingress是一个API对象,它允许你定义如何从集群外部访问集群内部的服务。Ingress可以提供负载均衡、SSL终结和基于名称的虚拟主机等功能。通过Ingress,你可…...
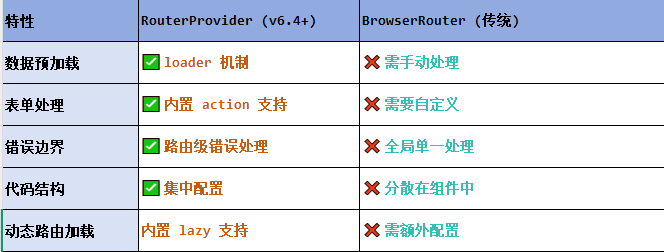
React第五十七节 Router中RouterProvider使用详解及注意事项
前言 在 React Router v6.4 中,RouterProvider 是一个核心组件,用于提供基于数据路由(data routers)的新型路由方案。 它替代了传统的 <BrowserRouter>,支持更强大的数据加载和操作功能(如 loader 和…...
以下是对华为 HarmonyOS NETX 5属性动画(ArkTS)文档的结构化整理,通过层级标题、表格和代码块提升可读性:
一、属性动画概述NETX 作用:实现组件通用属性的渐变过渡效果,提升用户体验。支持属性:width、height、backgroundColor、opacity、scale、rotate、translate等。注意事项: 布局类属性(如宽高)变化时&#…...

2024年赣州旅游投资集团社会招聘笔试真
2024年赣州旅游投资集团社会招聘笔试真 题 ( 满 分 1 0 0 分 时 间 1 2 0 分 钟 ) 一、单选题(每题只有一个正确答案,答错、不答或多答均不得分) 1.纪要的特点不包括()。 A.概括重点 B.指导传达 C. 客观纪实 D.有言必录 【答案】: D 2.1864年,()预言了电磁波的存在,并指出…...

服务器硬防的应用场景都有哪些?
服务器硬防是指一种通过硬件设备层面的安全措施来防御服务器系统受到网络攻击的方式,避免服务器受到各种恶意攻击和网络威胁,那么,服务器硬防通常都会应用在哪些场景当中呢? 硬防服务器中一般会配备入侵检测系统和预防系统&#x…...

VTK如何让部分单位不可见
最近遇到一个需求,需要让一个vtkDataSet中的部分单元不可见,查阅了一些资料大概有以下几种方式 1.通过颜色映射表来进行,是最正规的做法 vtkNew<vtkLookupTable> lut; //值为0不显示,主要是最后一个参数,透明度…...

RNN避坑指南:从数学推导到LSTM/GRU工业级部署实战流程
本文较长,建议点赞收藏,以免遗失。更多AI大模型应用开发学习视频及资料,尽在聚客AI学院。 本文全面剖析RNN核心原理,深入讲解梯度消失/爆炸问题,并通过LSTM/GRU结构实现解决方案,提供时间序列预测和文本生成…...

关键领域软件测试的突围之路:如何破解安全与效率的平衡难题
在数字化浪潮席卷全球的今天,软件系统已成为国家关键领域的核心战斗力。不同于普通商业软件,这些承载着国家安全使命的软件系统面临着前所未有的质量挑战——如何在确保绝对安全的前提下,实现高效测试与快速迭代?这一命题正考验着…...
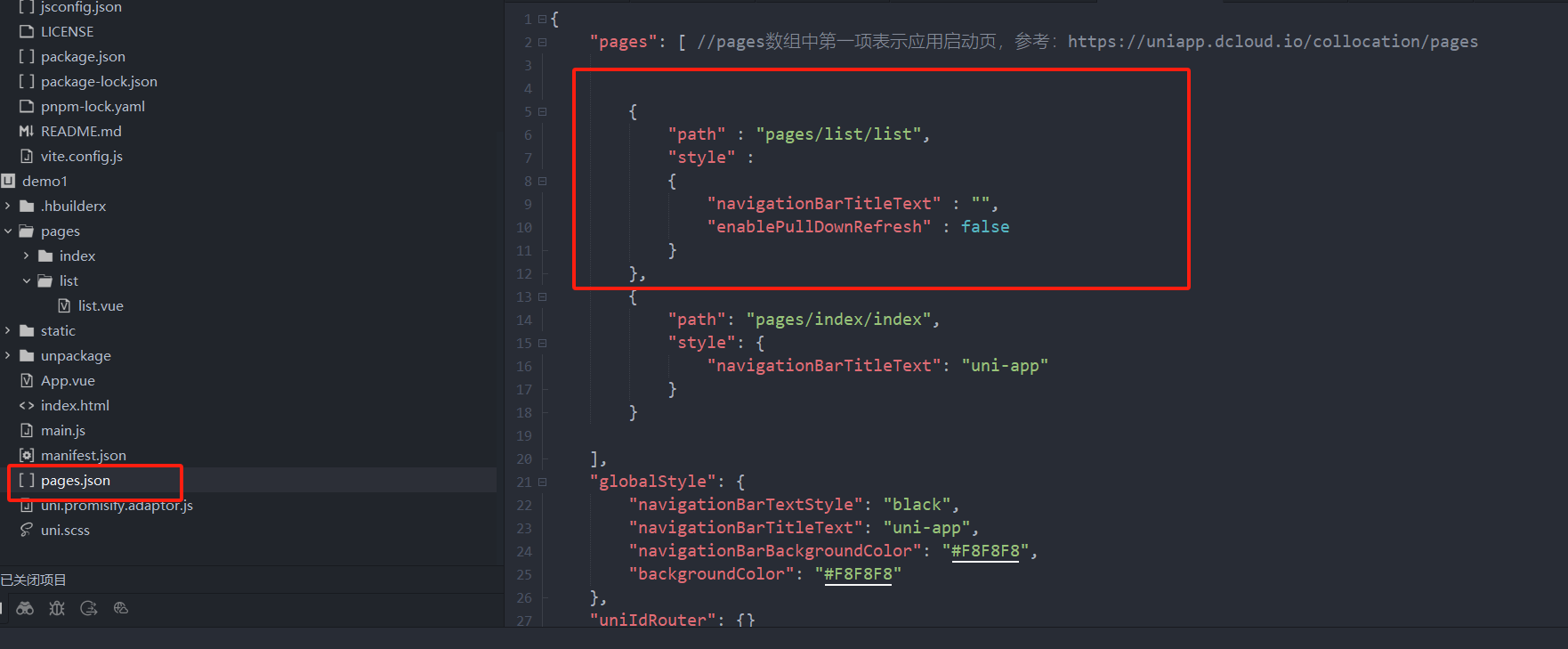
uniapp 小程序 学习(一)
利用Hbuilder 创建项目 运行到内置浏览器看效果 下载微信小程序 安装到Hbuilder 下载地址 :开发者工具默认安装 设置服务端口号 在Hbuilder中设置微信小程序 配置 找到运行设置,将微信开发者工具放入到Hbuilder中, 打开后出现 如下 bug 解…...