realsense D435l+mid360标定
目录
一、安装realsense环境
二、获取realsense D450L相机内参
三、标定雷达和相机
1.下载livox_camera_calib
2.修改配置参数
3.使用fastlio生成点云
4.标定
一、安装realsense环境
git clone https://github.com/IntelRealSense/librealsense.git
cd librealsense
//更新依赖库
sudo apt-get update && sudo apt-get upgrade && sudo apt-get dist-upgrade
//安装所需的依赖
sudo apt-get install libudev-dev pkg-config libgtk-3-dev
sudo apt-get install libusb-1.0-0-dev pkg-config
sudo apt-get install libglfw3-dev
sudo apt-get install libssl-dev
//编译
cd librealsense
mkdir build
cd build
cmake ../ -DBUILD_EXAMPLES=true
make
sudo make install
//测试是否安装成功
realsense-viewer安装环境过程中如果出现以下报错,采用以下方法。error: ‘LocalParameterization’ is not a member of ‘ceres-CSDN博客

ceres::LocalParameterization *quatParam = new ceres::EigenQuaternionParameterization();替换为
ceres::Manifold *quatParam = new ceres::EigenQuaternionManifold();
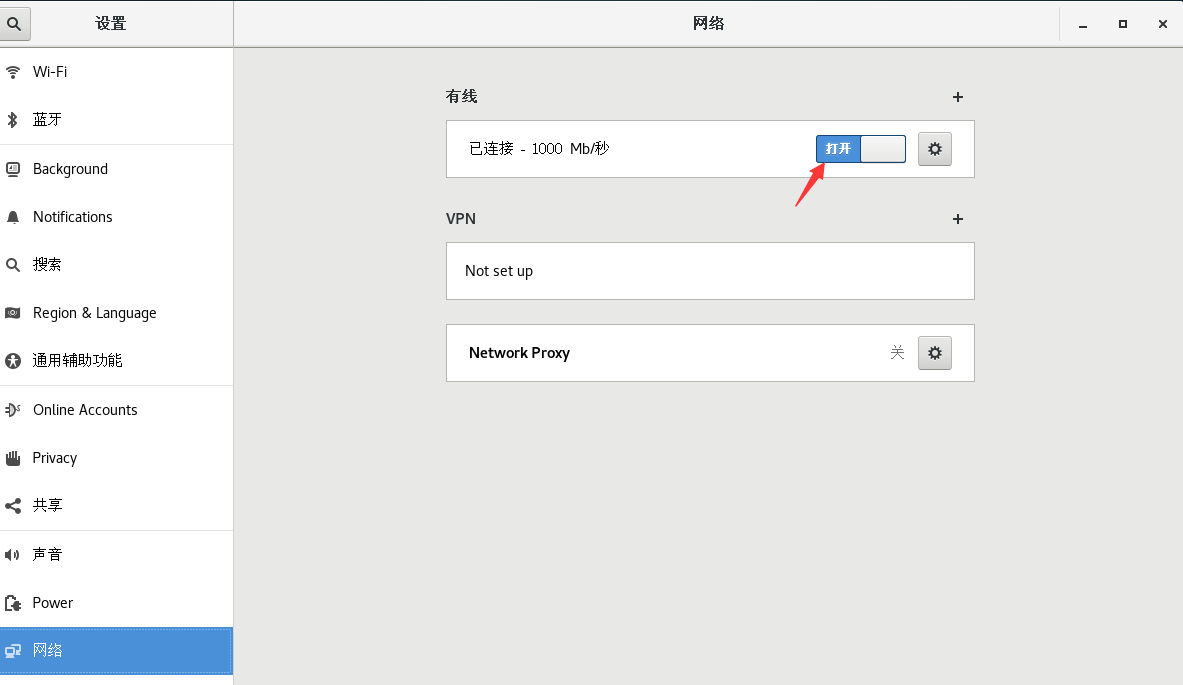
二、获取realsense D450L相机内参
sudo apt install ros-noetic-camera-calibration
roslaunch realsense2_camera rs_camera.launch
内参结果
| distortion_model: "plumb_bob" D: [0.0, 0.0, 0.0, 0.0, 0.0] K: [613.80517578125, 0.0, 321.6905212402344, 0.0, 614.0089111328125, 244.05947875976562, 0.0, 0.0, 1.0] R: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0] P: [613.80517578125, 0.0, 321.6905212402344, 0.0, 0.0, 614.0089111328125, 244.05947875976562, 0.0, 0.0, 0.0, 1.0, 0.0] binning_x: 0 binning_y: 0 roi: x_offset: 0 y_offset: 0 height: 0 width: 0 do_rectify: False --- header: seq: 597 stamp: secs: 1720576168 nsecs: 845483780 frame_id: "camera_color_optical_frame" height: 480 width: 640 |
三、标定雷达和相机
1.下载livox_camera_calib
cd ~/catkin_ws/src
git clone https://github.com/hku-mars/livox_camera_calib.git
cd ../
catkin_make
source ~/catkin_ws/devel/setup.bash2.修改配置参数
image_file中存放相机拍摄的图片,pcl_file中存放雷达的点云数据(雷达点云数据采用fastlio算法生成),result_file中存放点云和图片配准的内外参数结果。将上一步生成的相机内参放入camera中。修改calib中的outdoor的yaml文档。

3.使用fastlio生成点云
cd ~/$A_ROS_DIR$/srcgit clone https://github.com/hku-mars/FAST_LIO.gitcd FAST_LIOgit submodule update --initcd ../..catkin_makesource devel/setup.bash
//建图 For Avia mid360需要修改相关节点cd ~/$FAST_LIO_ROS_DIR$source devel/setup.bashroslaunch fast_lio mapping_avia.launchroslaunch livox_ros_driver livox_lidar_msg.launch4.标定
roslaunch livox_camera_calib calib.launch



相关文章:
realsense D435l+mid360标定
目录 一、安装realsense环境 二、获取realsense D450L相机内参 三、标定雷达和相机 1.下载livox_camera_calib 2.修改配置参数 3.使用fastlio生成点云 4.标定 一、安装realsense环境 git clone https://github.com/IntelRealSense/librealsense.git cd librealsense //更…...

深度学习中的正则化技术 - 数据集增强篇
序言 在机器学习与深度学习的广阔领域中,数据集的质量与规模往往是决定模型性能的关键因素之一。然而,现实世界中高质量、标注完善的数据集往往稀缺且获取成本高昂,这成为了制约算法进步的一大瓶颈。为了缓解这一问题,数据集增强…...

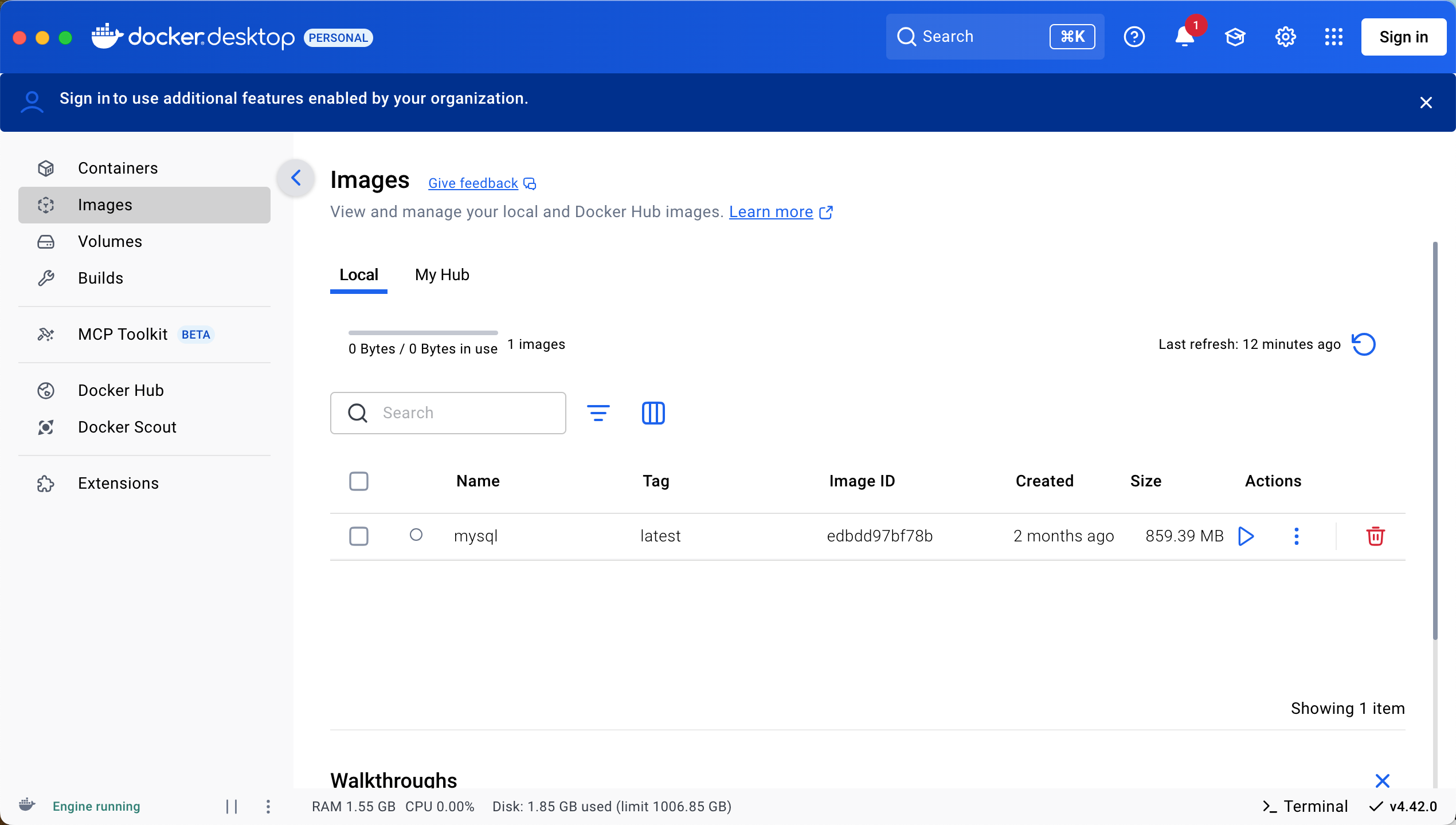
【Docker系列】Docker 镜像源:优化你的容器化开发流程
💝💝💝欢迎来到我的博客,很高兴能够在这里和您见面!希望您在这里可以感受到一份轻松愉快的氛围,不仅可以获得有趣的内容和知识,也可以畅所欲言、分享您的想法和见解。 推荐:kwan 的首页,持续学…...
【Linux】Windows环境下配置虚拟机静态IP
当前我们虚拟机的Linux操作系统,其IP地址是通过DHCP服务获取的。 DHCP:动态获取IP地址,即每闪重启设备后都会获取一次,可能导致IP地址频繁变更 原因1:办公电脑IP地址变化无所谓,但是我们要远程连接到Linux系统&#x…...

完美解决AttributeError: ‘list‘ object has no attribute ‘shape‘的正确解决方法,亲测有效!!!
完美解决AttributeError: ‘list‘ object has no attribute ‘shape‘的正确解决方法,亲测有效!!! 亲测有效 完美解决AttributeError: ‘list‘ object has no attribute ‘shape‘的正确解决方法,亲测有效࿰…...
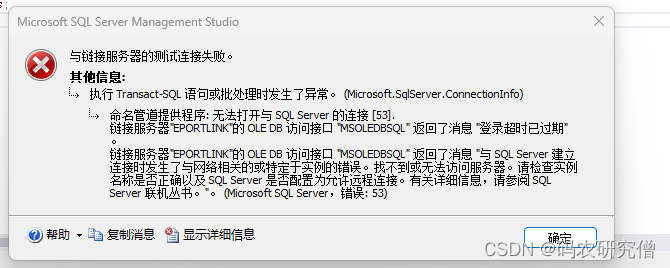
链接服务器“XX”的OLEDB访问接口“MSOLEDBSQL”返回了消息“登录超时已过期” 解决方法
目录 1. 问题所示2. 原理分析3. 解决方法1. 问题所示 出现如下问题: 与链接服务器的测试连接失败。执行Transact-SQL 语句或批处理时发生了异常。命名管道提供程序:无法打开与SQL SERVER的链接[53]链接服务器“XX”的OLEDB访问接口“MSOLEDBSQL”返回了消息“登录超时已过期…...

【AI伦理与社会责任】讨论人工智能在隐私保护、偏见消除、自动化对就业的影响等伦理和社会问题。
人工智能(AI)作为第四次产业革命的核心技术,在推动社会进步和经济发展的同时,也引发了一系列伦理和社会问题。以下从隐私保护、偏见消除以及自动化对就业的影响三个方面进行详细讨论。 一、隐私保护 人工智能技术的广泛应用涉及…...
TCP缓存区数据读取)
Qt编程技巧小知识点(1)TCP缓存区数据读取
文章目录 Qt编程技巧小知识点(1)TCP缓存区数据读取小结 Qt编程技巧小知识点(1)TCP缓存区数据读取 TCP的socket对内存进行读取(使用socket->readall())的时候输出的内容有时会进行局部倒置,其…...

vue 搭建 pinia
文章目录 环境设置存储读取数据【 storeToRefs】借助storeToRefs将store中的数据转为ref对象,方便在模板中使用【getters】当state中的数据,需要经过处理后再使用时,可以使用getters配置【$subscribe】通过 store 的 $subscribe() 方法侦听 s…...

什么是CLR
CLR,全称为Common Language Runtime,即公共语言运行时,是微软为.NET产品构建的运行环境,与Java的JVM(Java虚拟机)类似,可以看作是.NET的虚拟机。CLR的主要作用和特点如下: 主要作用…...

Spring MVC -01
Spring 的 MVC 框架 Spring的MVC框架是Spring框架的一部分,它提供了用于开发Web应用程序的一组组件和设计模式。MVC是Model-View-Controller的缩写,是一种设计模式,用于将应用程序的逻辑与用户界面分离。 在Spring的MVC框架中,Mo…...

山海鲸可视化——天地图画面和热力图
山海鲸引入天地图目前只有 iframe 的方式引入 首先我们创建一个文件夹 ——index.html ——index.js ——data.js 大家都是大佬,我就不详细介绍了,上代码都能看得懂 首先是index.html <!DOCTYPE html> <html lang"zh-CN"> <…...

Python 利用pandas处理CSV文件(DataFrame的基础用法)
前面介绍过通过Python标准库中的CSV模块处理CSV文件: Python 利用CSV模块处理数据 相比CSV模块,pandas的功能更加强大,本文将简单介绍如何通过pandas来处理CSV文件。 文章目录 一、pandas简介二、用法示例2.1 读取CSV文件2.1.1 read_csv参数…...
和*(指针))
c++ 的(引用)和*(指针)
在C中,&(引用)和*(指针)在函数参数中的使用有各自的特点和用途。下面是它们的具体使用方式以及它们之间的一些区别: 引用(&) 使用方式: 引用作为函数参数时,可…...

人工智能算法工程师(中级)课程6-sklearn机器学习之聚类问题与代码详解
大家好,我是微学AI,今天给大家介绍一下人工智能算法工程师(中级)课程6-sklearn机器学习之聚类问题与代码详解。在机器学习领域,聚类是一种无监督学习方法,旨在将相似的数据点划分为同一类别。sklearn是一个广泛应用于机器学习的Py…...

Objective-C 中的 isa 不再是简单的结构体指针
了解 Objective-C 中的 isa 指针内存结构 在 Objective-C 中,isa 指针是对象和类之间的重要桥梁。它不仅帮助运行时系统识别对象的类型,还参与了一些内存和性能优化。本文将深入讲解 isa 指针的内存结构,包括其在早期和现代实现中的演变。 …...

中介子方程五十二
XXFXXaXnXaXXαXLXyXXWXuXeXKXXiXyXΣXXΣXXVXuXhXXWXηXXiXhXXpXiXXpXXbXXpXXiXpXXhXiXXηXWXXhXuXVXXΣXXΣXyXiXXKXeXuXWXXyXLXαXXaXnXaXXFXXaXnXaXXαXLXyXXWXuXeXKXXiXyXΣXXΣXXVXuXhXXWXηXXiXhXXpXiXXpXXbXXpXXiXpXXhXiXXηXWXXhXuXVXXΣXXΣXyXiXXKXeXuXWXXyXLXαXXa…...

LabVIEW在半导体自动化测试中的应用
半导体制造的复杂性和精密度要求极高,每一个生产步骤都需要严格的控制和监测。自动化测试设备在半导体制造中起到了关键作用,通过精密测量和数据分析,确保产品质量和生产效率。本文介绍如何使用LabVIEW结合研华硬件,开发一个用于半…...

政安晨:【Keras机器学习示例演绎】(五十三)—— 使用 TensorFlow 决策森林进行分类
目录 简介 设置 准备数据 定义数据集元数据 配置超参数 实施培训和评估程序 实验 1:使用原始特征的决策森林 检查模型 实验 2:目标编码决策森林 创建模型输入 使用目标编码实现特征编码 使用预处理器创建梯度提升树模型 训练和评估模型 实验…...

51单片机:电脑通过串口控制LED亮灭(附溢出率和波特率详解)
一、功能实现 1.电脑通过串口发送数据:0F 2.点亮4个LED 二、注意事项 1.发送和接受数据的文本模式 2.串口要对应 3.注意串口的波特率要和程序中的波特率保持一致 4.有无校验位和停止位 三、如何使用串口波特率计算器 1.以本程序为例 2.生成代码如下 void Uar…...

.Net框架,除了EF还有很多很多......
文章目录 1. 引言2. Dapper2.1 概述与设计原理2.2 核心功能与代码示例基本查询多映射查询存储过程调用 2.3 性能优化原理2.4 适用场景 3. NHibernate3.1 概述与架构设计3.2 映射配置示例Fluent映射XML映射 3.3 查询示例HQL查询Criteria APILINQ提供程序 3.4 高级特性3.5 适用场…...

在HarmonyOS ArkTS ArkUI-X 5.0及以上版本中,手势开发全攻略:
在 HarmonyOS 应用开发中,手势交互是连接用户与设备的核心纽带。ArkTS 框架提供了丰富的手势处理能力,既支持点击、长按、拖拽等基础单一手势的精细控制,也能通过多种绑定策略解决父子组件的手势竞争问题。本文将结合官方开发文档,…...
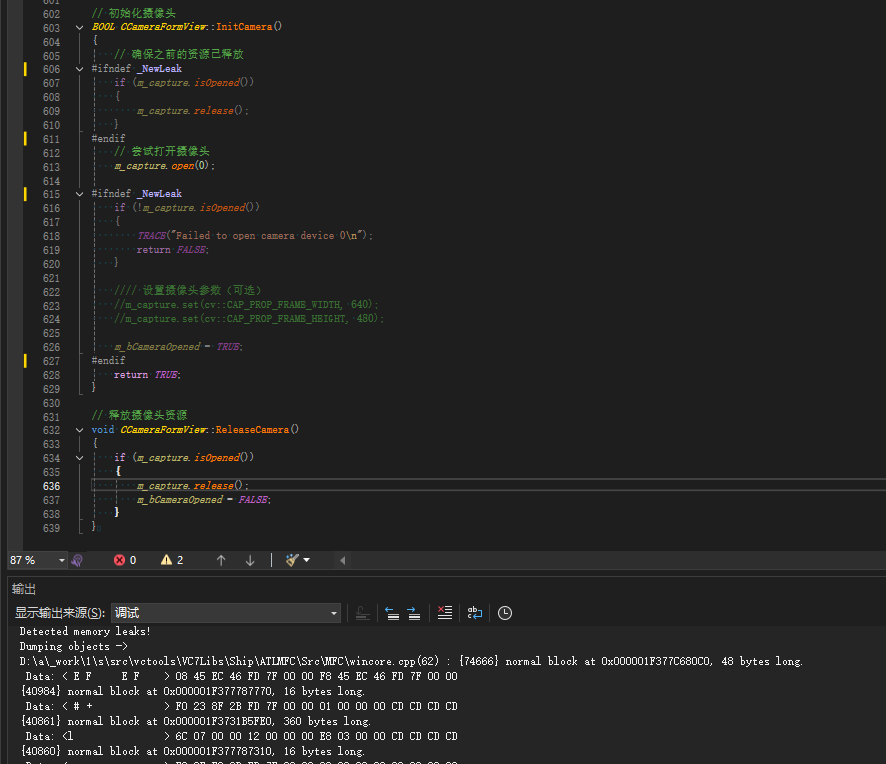
MFC内存泄露
1、泄露代码示例 void X::SetApplicationBtn() {CMFCRibbonApplicationButton* pBtn GetApplicationButton();// 获取 Ribbon Bar 指针// 创建自定义按钮CCustomRibbonAppButton* pCustomButton new CCustomRibbonAppButton();pCustomButton->SetImage(IDB_BITMAP_Jdp26)…...
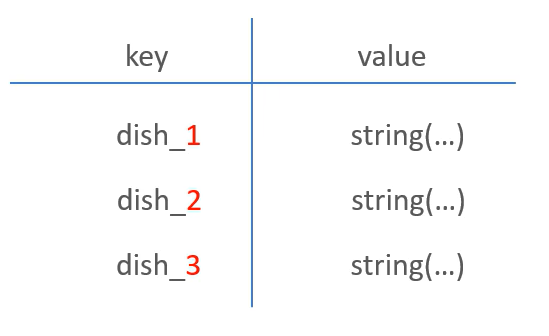
苍穹外卖--缓存菜品
1.问题说明 用户端小程序展示的菜品数据都是通过查询数据库获得,如果用户端访问量比较大,数据库访问压力随之增大 2.实现思路 通过Redis来缓存菜品数据,减少数据库查询操作。 缓存逻辑分析: ①每个分类下的菜品保持一份缓存数据…...

docker 部署发现spring.profiles.active 问题
报错: org.springframework.boot.context.config.InvalidConfigDataPropertyException: Property spring.profiles.active imported from location class path resource [application-test.yml] is invalid in a profile specific resource [origin: class path re…...

Spring是如何解决Bean的循环依赖:三级缓存机制
1、什么是 Bean 的循环依赖 在 Spring框架中,Bean 的循环依赖是指多个 Bean 之间互相持有对方引用,形成闭环依赖关系的现象。 多个 Bean 的依赖关系构成环形链路,例如: 双向依赖:Bean A 依赖 Bean B,同时 Bean B 也依赖 Bean A(A↔B)。链条循环: Bean A → Bean…...
Docker 本地安装 mysql 数据库
Docker: Accelerated Container Application Development 下载对应操作系统版本的 docker ;并安装。 基础操作不再赘述。 打开 macOS 终端,开始 docker 安装mysql之旅 第一步 docker search mysql 》〉docker search mysql NAME DE…...
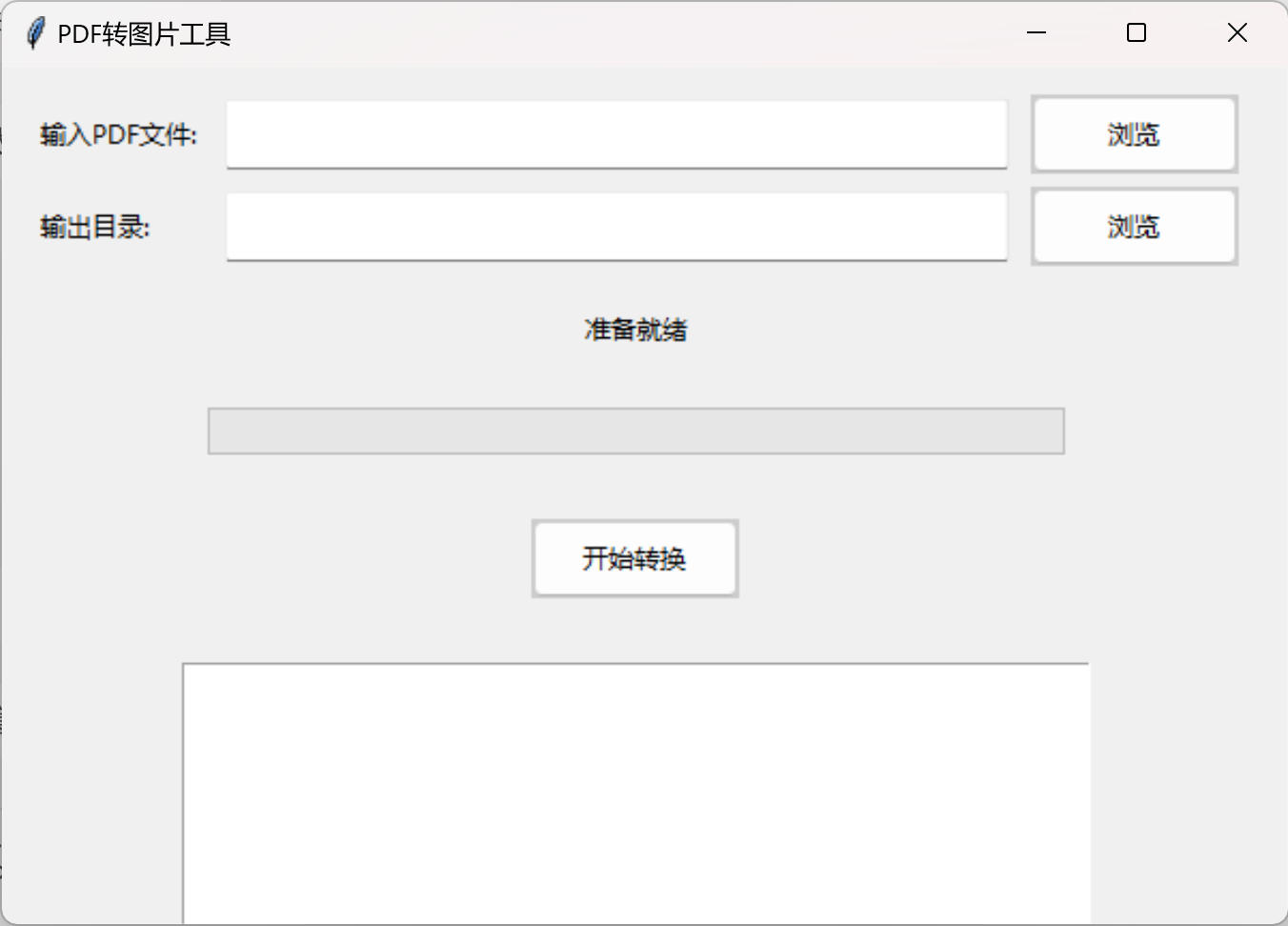
免费PDF转图片工具
免费PDF转图片工具 一款简单易用的PDF转图片工具,可以将PDF文件快速转换为高质量PNG图片。无需安装复杂的软件,也不需要在线上传文件,保护您的隐私。 工具截图 主要特点 🚀 快速转换:本地转换,无需等待上…...

Python Einops库:深度学习中的张量操作革命
Einops(爱因斯坦操作库)就像给张量操作戴上了一副"语义眼镜"——让你用人类能理解的方式告诉计算机如何操作多维数组。这个基于爱因斯坦求和约定的库,用类似自然语言的表达式替代了晦涩的API调用,彻底改变了深度学习工程…...
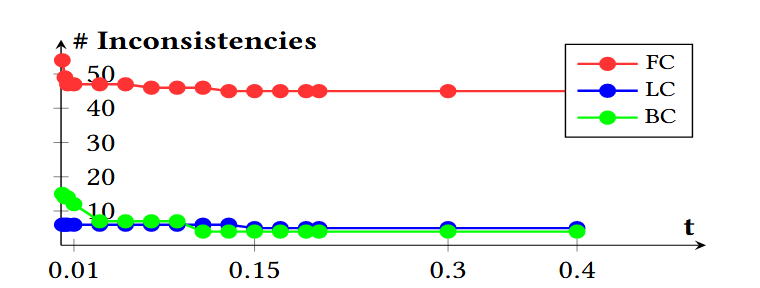
论文阅读笔记——Muffin: Testing Deep Learning Libraries via Neural Architecture Fuzzing
Muffin 论文 现有方法 CRADLE 和 LEMON,依赖模型推理阶段输出进行差分测试,但在训练阶段是不可行的,因为训练阶段直到最后才有固定输出,中间过程是不断变化的。API 库覆盖低,因为各个 API 都是在各种具体场景下使用。…...