昇思25天学习打卡营第14天|计算机视觉
昇思25天学习打卡营第14天
文章目录
- 昇思25天学习打卡营第14天
- FCN图像语义分割
- 语义分割
- 模型简介
- 网络特点
- 数据处理
- 数据预处理
- 数据加载
- 训练集可视化
- 网络构建
- 网络流程
- 训练准备
- 导入VGG-16部分预训练权重
- 损失函数
- 自定义评价指标 Metrics
- 模型训练
- 模型评估
- 模型推理
- 总结
- 引用
- 打卡记录
FCN图像语义分割
全卷积网络(Fully Convolutional Networks,FCN)是UC Berkeley的Jonathan Long等人于2015年在Fully Convolutional Networks for Semantic Segmentation[1]一文中提出的用于图像语义分割的一种框架。
FCN是首个端到端(end to end)进行像素级(pixel level)预测的全卷积网络。

语义分割
在具体介绍FCN之前,首先介绍何为语义分割:
图像语义分割(semantic segmentation)是图像处理和机器视觉技术中关于图像理解的重要一环,AI领域中一个重要分支,常被应用于人脸识别、物体检测、医学影像、卫星图像分析、自动驾驶感知等领域。
语义分割的目的是对图像中每个像素点进行分类。与普通的分类任务只输出某个类别不同,语义分割任务输出与输入大小相同的图像,输出图像的每个像素对应了输入图像每个像素的类别。语义在图像领域指的是图像的内容,对图片意思的理解,下图是一些语义分割的实例:

模型简介
FCN主要用于图像分割领域,是一种端到端的分割方法,是深度学习应用在图像语义分割的开山之作。通过进行像素级的预测直接得出与原图大小相等的label map。因FCN丢弃全连接层替换为全卷积层,网络所有层均为卷积层,故称为全卷积网络。
全卷积神经网络主要使用以下三种技术:
-
卷积化(Convolutional)
使用VGG-16作为FCN的backbone。VGG-16的输入为224*224的RGB图像,输出为1000个预测值。VGG-16只能接受固定大小的输入,丢弃了空间坐标,产生非空间输出。VGG-16中共有三个全连接层,全连接层也可视为带有覆盖整个区域的卷积。将全连接层转换为卷积层能使网络输出由一维非空间输出变为二维矩阵,利用输出能生成输入图片映射的heatmap。

-
上采样(Upsample)
在卷积过程的卷积操作和池化操作会使得特征图的尺寸变小,为得到原图的大小的稠密图像预测,需要对得到的特征图进行上采样操作。使用双线性插值的参数来初始化上采样逆卷积的参数,后通过反向传播来学习非线性上采样。在网络中执行上采样,以通过像素损失的反向传播进行端到端的学习。

-
跳跃结构(Skip Layer)
利用上采样技巧对最后一层的特征图进行上采样得到原图大小的分割是步长为32像素的预测,称之为FCN-32s。由于最后一层的特征图太小,损失过多细节,采用skips结构将更具有全局信息的最后一层预测和更浅层的预测结合,使预测结果获取更多的局部细节。将底层(stride 32)的预测(FCN-32s)进行2倍的上采样得到原尺寸的图像,并与从pool4层(stride 16)进行的预测融合起来(相加),这一部分的网络被称为FCN-16s。随后将这一部分的预测再进行一次2倍的上采样并与从pool3层得到的预测融合起来,这一部分的网络被称为FCN-8s。 Skips结构将深层的全局信息与浅层的局部信息相结合。

网络特点
- 不含全连接层(fc)的全卷积(fully conv)网络,可适应任意尺寸输入。
- 增大数据尺寸的反卷积(deconv)层,能够输出精细的结果。
- 结合不同深度层结果的跳级(skip)结构,同时确保鲁棒性和精确性。
数据处理
开始实验前,需确保本地已经安装Python环境及MindSpore。
%%capture captured_output
# 实验环境已经预装了mindspore==2.2.14,如需更换mindspore版本,可更改下面mindspore的版本号
!pip uninstall mindspore -y
!pip install -i https://pypi.mirrors.ustc.edu.cn/simple mindspore==2.2.14
# 查看当前 mindspore 版本
!pip show mindspore
from download import downloadurl = "https://mindspore-website.obs.cn-north-4.myhuaweicloud.com/notebook/datasets/dataset_fcn8s.tar"download(url, "./dataset", kind="tar", replace=True)
数据预处理
由于PASCAL VOC 2012数据集中图像的分辨率大多不一致,无法放在一个tensor中,故输入前需做标准化处理。
数据加载
将PASCAL VOC 2012数据集与SDB数据集进行混合。
import numpy as np
import cv2
import mindspore.dataset as dsclass SegDataset:def __init__(self,image_mean,image_std,data_file='',batch_size=32,crop_size=512,max_scale=2.0,min_scale=0.5,ignore_label=255,num_classes=21,num_readers=2,num_parallel_calls=4):self.data_file = data_fileself.batch_size = batch_sizeself.crop_size = crop_sizeself.image_mean = np.array(image_mean, dtype=np.float32)self.image_std = np.array(image_std, dtype=np.float32)self.max_scale = max_scaleself.min_scale = min_scaleself.ignore_label = ignore_labelself.num_classes = num_classesself.num_readers = num_readersself.num_parallel_calls = num_parallel_callsmax_scale > min_scaledef preprocess_dataset(self, image, label):image_out = cv2.imdecode(np.frombuffer(image, dtype=np.uint8), cv2.IMREAD_COLOR)label_out = cv2.imdecode(np.frombuffer(label, dtype=np.uint8), cv2.IMREAD_GRAYSCALE)sc = np.random.uniform(self.min_scale, self.max_scale)new_h, new_w = int(sc * image_out.shape[0]), int(sc * image_out.shape[1])image_out = cv2.resize(image_out, (new_w, new_h), interpolation=cv2.INTER_CUBIC)label_out = cv2.resize(label_out, (new_w, new_h), interpolation=cv2.INTER_NEAREST)image_out = (image_out - self.image_mean) / self.image_stdout_h, out_w = max(new_h, self.crop_size), max(new_w, self.crop_size)pad_h, pad_w = out_h - new_h, out_w - new_wif pad_h > 0 or pad_w > 0:image_out = cv2.copyMakeBorder(image_out, 0, pad_h, 0, pad_w, cv2.BORDER_CONSTANT, value=0)label_out = cv2.copyMakeBorder(label_out, 0, pad_h, 0, pad_w, cv2.BORDER_CONSTANT, value=self.ignore_label)offset_h = np.random.randint(0, out_h - self.crop_size + 1)offset_w = np.random.randint(0, out_w - self.crop_size + 1)image_out = image_out[offset_h: offset_h + self.crop_size, offset_w: offset_w + self.crop_size, :]label_out = label_out[offset_h: offset_h + self.crop_size, offset_w: offset_w+self.crop_size]if np.random.uniform(0.0, 1.0) > 0.5:image_out = image_out[:, ::-1, :]label_out = label_out[:, ::-1]image_out = image_out.transpose((2, 0, 1))image_out = image_out.copy()label_out = label_out.copy()label_out = label_out.astype("int32")return image_out, label_outdef get_dataset(self):ds.config.set_numa_enable(True)dataset = ds.MindDataset(self.data_file, columns_list=["data", "label"],shuffle=True, num_parallel_workers=self.num_readers)transforms_list = self.preprocess_datasetdataset = dataset.map(operations=transforms_list, input_columns=["data", "label"],output_columns=["data", "label"],num_parallel_workers=self.num_parallel_calls)dataset = dataset.shuffle(buffer_size=self.batch_size * 10)dataset = dataset.batch(self.batch_size, drop_remainder=True)return dataset# 定义创建数据集的参数
IMAGE_MEAN = [103.53, 116.28, 123.675]
IMAGE_STD = [57.375, 57.120, 58.395]
DATA_FILE = "dataset/dataset_fcn8s/mindname.mindrecord"# 定义模型训练参数
train_batch_size = 4
crop_size = 512
min_scale = 0.5
max_scale = 2.0
ignore_label = 255
num_classes = 21# 实例化Dataset
dataset = SegDataset(image_mean=IMAGE_MEAN,image_std=IMAGE_STD,data_file=DATA_FILE,batch_size=train_batch_size,crop_size=crop_size,max_scale=max_scale,min_scale=min_scale,ignore_label=ignore_label,num_classes=num_classes,num_readers=2,num_parallel_calls=4)dataset = dataset.get_dataset()
训练集可视化
运行以下代码观察载入的数据集图片(数据处理过程中已做归一化处理)。
import numpy as np
import matplotlib.pyplot as pltplt.figure(figsize=(16, 8))# 对训练集中的数据进行展示
for i in range(1, 9):plt.subplot(2, 4, i)show_data = next(dataset.create_dict_iterator())show_images = show_data["data"].asnumpy()show_images = np.clip(show_images, 0, 1)
# 将图片转换HWC格式后进行展示plt.imshow(show_images[0].transpose(1, 2, 0))plt.axis("off")plt.subplots_adjust(wspace=0.05, hspace=0)
plt.show()

网络构建
网络流程
FCN网络的流程如下图所示:
- 输入图像image,经过pool1池化后,尺寸变为原始尺寸的1/2。
- 经过pool2池化,尺寸变为原始尺寸的1/4。
- 接着经过pool3、pool4、pool5池化,大小分别变为原始尺寸的1/8、1/16、1/32。
- 经过conv6-7卷积,输出的尺寸依然是原图的1/32。
- FCN-32s是最后使用反卷积,使得输出图像大小与输入图像相同。
- FCN-16s是将conv7的输出进行反卷积,使其尺寸扩大两倍至原图的1/16,并将其与pool4输出的特征图进行融合,后通过反卷积扩大到原始尺寸。
- FCN-8s是将conv7的输出进行反卷积扩大4倍,将pool4输出的特征图反卷积扩大2倍,并将pool3输出特征图拿出,三者融合后通反卷积扩大到原始尺寸。

使用以下代码构建FCN-8s网络。
import mindspore.nn as nnclass FCN8s(nn.Cell):def __init__(self, n_class):super().__init__()self.n_class = n_classself.conv1 = nn.SequentialCell(nn.Conv2d(in_channels=3, out_channels=64,kernel_size=3, weight_init='xavier_uniform'),nn.BatchNorm2d(64),nn.ReLU(),nn.Conv2d(in_channels=64, out_channels=64,kernel_size=3, weight_init='xavier_uniform'),nn.BatchNorm2d(64),nn.ReLU())self.pool1 = nn.MaxPool2d(kernel_size=2, stride=2)self.conv2 = nn.SequentialCell(nn.Conv2d(in_channels=64, out_channels=128,kernel_size=3, weight_init='xavier_uniform'),nn.BatchNorm2d(128),nn.ReLU(),nn.Conv2d(in_channels=128, out_channels=128,kernel_size=3, weight_init='xavier_uniform'),nn.BatchNorm2d(128),nn.ReLU())self.pool2 = nn.MaxPool2d(kernel_size=2, stride=2)self.conv3 = nn.SequentialCell(nn.Conv2d(in_channels=128, out_channels=256,kernel_size=3, weight_init='xavier_uniform'),nn.BatchNorm2d(256),nn.ReLU(),nn.Conv2d(in_channels=256, out_channels=256,kernel_size=3, weight_init='xavier_uniform'),nn.BatchNorm2d(256),nn.ReLU(),nn.Conv2d(in_channels=256, out_channels=256,kernel_size=3, weight_init='xavier_uniform'),nn.BatchNorm2d(256),nn.ReLU())self.pool3 = nn.MaxPool2d(kernel_size=2, stride=2)self.conv4 = nn.SequentialCell(nn.Conv2d(in_channels=256, out_channels=512,kernel_size=3, weight_init='xavier_uniform'),nn.BatchNorm2d(512),nn.ReLU(),nn.Conv2d(in_channels=512, out_channels=512,kernel_size=3, weight_init='xavier_uniform'),nn.BatchNorm2d(512),nn.ReLU(),nn.Conv2d(in_channels=512, out_channels=512,kernel_size=3, weight_init='xavier_uniform'),nn.BatchNorm2d(512),nn.ReLU())self.pool4 = nn.MaxPool2d(kernel_size=2, stride=2)self.conv5 = nn.SequentialCell(nn.Conv2d(in_channels=512, out_channels=512,kernel_size=3, weight_init='xavier_uniform'),nn.BatchNorm2d(512),nn.ReLU(),nn.Conv2d(in_channels=512, out_channels=512,kernel_size=3, weight_init='xavier_uniform'),nn.BatchNorm2d(512),nn.ReLU(),nn.Conv2d(in_channels=512, out_channels=512,kernel_size=3, weight_init='xavier_uniform'),nn.BatchNorm2d(512),nn.ReLU())self.pool5 = nn.MaxPool2d(kernel_size=2, stride=2)self.conv6 = nn.SequentialCell(nn.Conv2d(in_channels=512, out_channels=4096,kernel_size=7, weight_init='xavier_uniform'),nn.BatchNorm2d(4096),nn.ReLU(),)self.conv7 = nn.SequentialCell(nn.Conv2d(in_channels=4096, out_channels=4096,kernel_size=1, weight_init='xavier_uniform'),nn.BatchNorm2d(4096),nn.ReLU(),)self.score_fr = nn.Conv2d(in_channels=4096, out_channels=self.n_class,kernel_size=1, weight_init='xavier_uniform')self.upscore2 = nn.Conv2dTranspose(in_channels=self.n_class, out_channels=self.n_class,kernel_size=4, stride=2, weight_init='xavier_uniform')self.score_pool4 = nn.Conv2d(in_channels=512, out_channels=self.n_class,kernel_size=1, weight_init='xavier_uniform')self.upscore_pool4 = nn.Conv2dTranspose(in_channels=self.n_class, out_channels=self.n_class,kernel_size=4, stride=2, weight_init='xavier_uniform')self.score_pool3 = nn.Conv2d(in_channels=256, out_channels=self.n_class,kernel_size=1, weight_init='xavier_uniform')self.upscore8 = nn.Conv2dTranspose(in_channels=self.n_class, out_channels=self.n_class,kernel_size=16, stride=8, weight_init='xavier_uniform')def construct(self, x):x1 = self.conv1(x)p1 = self.pool1(x1)x2 = self.conv2(p1)p2 = self.pool2(x2)x3 = self.conv3(p2)p3 = self.pool3(x3)x4 = self.conv4(p3)p4 = self.pool4(x4)x5 = self.conv5(p4)p5 = self.pool5(x5)x6 = self.conv6(p5)x7 = self.conv7(x6)sf = self.score_fr(x7)u2 = self.upscore2(sf)s4 = self.score_pool4(p4)f4 = s4 + u2u4 = self.upscore_pool4(f4)s3 = self.score_pool3(p3)f3 = s3 + u4out = self.upscore8(f3)return out
训练准备
导入VGG-16部分预训练权重
FCN使用VGG-16作为骨干网络,用于实现图像编码。使用下面代码导入VGG-16预训练模型的部分预训练权重。
from download import download
from mindspore import load_checkpoint, load_param_into_neturl = "https://mindspore-website.obs.cn-north-4.myhuaweicloud.com/notebook/datasets/fcn8s_vgg16_pretrain.ckpt"
download(url, "fcn8s_vgg16_pretrain.ckpt", replace=True)
def load_vgg16():ckpt_vgg16 = "fcn8s_vgg16_pretrain.ckpt"param_vgg = load_checkpoint(ckpt_vgg16)load_param_into_net(net, param_vgg)
损失函数
语义分割是对图像中每个像素点进行分类,仍是分类问题,故损失函数选择交叉熵损失函数来计算FCN网络输出与mask之间的交叉熵损失。这里我们使用的是mindspore.nn.CrossEntropyLoss()作为损失函数。
自定义评价指标 Metrics
这一部分主要对训练出来的模型效果进行评估,为了便于解释,假设如下:共有 k + 1 k+1 k+1 个类(从 L 0 L_0 L0 到 L k L_k Lk, 其中包含一个空类或背景), p i j p_{i j} pij 表示本属于 i i i类但被预测为 j j j类的像素数量。即, p i i p_{i i} pii 表示真正的数量, 而 p i j p j i p_{i j} p_{j i} pijpji 则分别被解释为假正和假负, 尽管两者都是假正与假负之和。
- Pixel Accuracy(PA, 像素精度):这是最简单的度量,为标记正确的像素占总像素的比例。
P A = ∑ i = 0 k p i i ∑ i = 0 k ∑ j = 0 k p i j P A=\frac{\sum_{i=0}^k p_{i i}}{\sum_{i=0}^k \sum_{j=0}^k p_{i j}} PA=∑i=0k∑j=0kpij∑i=0kpii
- Mean Pixel Accuracy(MPA, 均像素精度):是PA的一种简单提升,计算每个类内被正确分类像素数的比例,之后求所有类的平均。
M P A = 1 k + 1 ∑ i = 0 k p i i ∑ j = 0 k p i j M P A=\frac{1}{k+1} \sum_{i=0}^k \frac{p_{i i}}{\sum_{j=0}^k p_{i j}} MPA=k+11i=0∑k∑j=0kpijpii
- Mean Intersection over Union(MloU, 均交并比):为语义分割的标准度量。其计算两个集合的交集和并集之,在语义分割的问题中,这两个集合为真实值(ground truth) 和预测值(predicted segmentation)。这个比例可以变形为正真数 (intersection) 比上真正、假负、假正(并集)之和。在每个类上计算loU,之后平均。
M I o U = 1 k + 1 ∑ i = 0 k p i i ∑ j = 0 k p i j + ∑ j = 0 k p j i − p i i M I o U=\frac{1}{k+1} \sum_{i=0}^k \frac{p_{i i}}{\sum_{j=0}^k p_{i j}+\sum_{j=0}^k p_{j i}-p_{i i}} MIoU=k+11i=0∑k∑j=0kpij+∑j=0kpji−piipii
- Frequency Weighted Intersection over Union(FWIoU, 频权交井比):为MloU的一种提升,这种方法根据每个类出现的频率为其设置权重。
F W I o U = 1 ∑ i = 0 k ∑ j = 0 k p i j ∑ i = 0 k p i i ∑ j = 0 k p i j + ∑ j = 0 k p j i − p i i F W I o U=\frac{1}{\sum_{i=0}^k \sum_{j=0}^k p_{i j}} \sum_{i=0}^k \frac{p_{i i}}{\sum_{j=0}^k p_{i j}+\sum_{j=0}^k p_{j i}-p_{i i}} FWIoU=∑i=0k∑j=0kpij1i=0∑k∑j=0kpij+∑j=0kpji−piipii
import numpy as np
import mindspore as ms
import mindspore.nn as nn
import mindspore.train as trainclass PixelAccuracy(train.Metric):def __init__(self, num_class=21):super(PixelAccuracy, self).__init__()self.num_class = num_classdef _generate_matrix(self, gt_image, pre_image):mask = (gt_image >= 0) & (gt_image < self.num_class)label = self.num_class * gt_image[mask].astype('int') + pre_image[mask]count = np.bincount(label, minlength=self.num_class**2)confusion_matrix = count.reshape(self.num_class, self.num_class)return confusion_matrixdef clear(self):self.confusion_matrix = np.zeros((self.num_class,) * 2)def update(self, *inputs):y_pred = inputs[0].asnumpy().argmax(axis=1)y = inputs[1].asnumpy().reshape(4, 512, 512)self.confusion_matrix += self._generate_matrix(y, y_pred)def eval(self):pixel_accuracy = np.diag(self.confusion_matrix).sum() / self.confusion_matrix.sum()return pixel_accuracyclass PixelAccuracyClass(train.Metric):def __init__(self, num_class=21):super(PixelAccuracyClass, self).__init__()self.num_class = num_classdef _generate_matrix(self, gt_image, pre_image):mask = (gt_image >= 0) & (gt_image < self.num_class)label = self.num_class * gt_image[mask].astype('int') + pre_image[mask]count = np.bincount(label, minlength=self.num_class**2)confusion_matrix = count.reshape(self.num_class, self.num_class)return confusion_matrixdef update(self, *inputs):y_pred = inputs[0].asnumpy().argmax(axis=1)y = inputs[1].asnumpy().reshape(4, 512, 512)self.confusion_matrix += self._generate_matrix(y, y_pred)def clear(self):self.confusion_matrix = np.zeros((self.num_class,) * 2)def eval(self):mean_pixel_accuracy = np.diag(self.confusion_matrix) / self.confusion_matrix.sum(axis=1)mean_pixel_accuracy = np.nanmean(mean_pixel_accuracy)return mean_pixel_accuracyclass MeanIntersectionOverUnion(train.Metric):def __init__(self, num_class=21):super(MeanIntersectionOverUnion, self).__init__()self.num_class = num_classdef _generate_matrix(self, gt_image, pre_image):mask = (gt_image >= 0) & (gt_image < self.num_class)label = self.num_class * gt_image[mask].astype('int') + pre_image[mask]count = np.bincount(label, minlength=self.num_class**2)confusion_matrix = count.reshape(self.num_class, self.num_class)return confusion_matrixdef update(self, *inputs):y_pred = inputs[0].asnumpy().argmax(axis=1)y = inputs[1].asnumpy().reshape(4, 512, 512)self.confusion_matrix += self._generate_matrix(y, y_pred)def clear(self):self.confusion_matrix = np.zeros((self.num_class,) * 2)def eval(self):mean_iou = np.diag(self.confusion_matrix) / (np.sum(self.confusion_matrix, axis=1) + np.sum(self.confusion_matrix, axis=0) -np.diag(self.confusion_matrix))mean_iou = np.nanmean(mean_iou)return mean_iouclass FrequencyWeightedIntersectionOverUnion(train.Metric):def __init__(self, num_class=21):super(FrequencyWeightedIntersectionOverUnion, self).__init__()self.num_class = num_classdef _generate_matrix(self, gt_image, pre_image):mask = (gt_image >= 0) & (gt_image < self.num_class)label = self.num_class * gt_image[mask].astype('int') + pre_image[mask]count = np.bincount(label, minlength=self.num_class**2)confusion_matrix = count.reshape(self.num_class, self.num_class)return confusion_matrixdef update(self, *inputs):y_pred = inputs[0].asnumpy().argmax(axis=1)y = inputs[1].asnumpy().reshape(4, 512, 512)self.confusion_matrix += self._generate_matrix(y, y_pred)def clear(self):self.confusion_matrix = np.zeros((self.num_class,) * 2)def eval(self):freq = np.sum(self.confusion_matrix, axis=1) / np.sum(self.confusion_matrix)iu = np.diag(self.confusion_matrix) / (np.sum(self.confusion_matrix, axis=1) + np.sum(self.confusion_matrix, axis=0) -np.diag(self.confusion_matrix))frequency_weighted_iou = (freq[freq > 0] * iu[freq > 0]).sum()return frequency_weighted_iou
模型训练
导入VGG-16预训练参数后,实例化损失函数、优化器,使用Model接口编译网络,训练FCN-8s网络。
import mindspore
from mindspore import Tensor
import mindspore.nn as nn
from mindspore.train import ModelCheckpoint, CheckpointConfig, LossMonitor, TimeMonitor, Modeldevice_target = "Ascend"
mindspore.set_context(mode=mindspore.PYNATIVE_MODE, device_target=device_target)train_batch_size = 4
num_classes = 21
# 初始化模型结构
net = FCN8s(n_class=21)
# 导入vgg16预训练参数
load_vgg16()
# 计算学习率
min_lr = 0.0005
base_lr = 0.05
train_epochs = 1
iters_per_epoch = dataset.get_dataset_size()
total_step = iters_per_epoch * train_epochslr_scheduler = mindspore.nn.cosine_decay_lr(min_lr,base_lr,total_step,iters_per_epoch,decay_epoch=2)
lr = Tensor(lr_scheduler[-1])# 定义损失函数
loss = nn.CrossEntropyLoss(ignore_index=255)
# 定义优化器
optimizer = nn.Momentum(params=net.trainable_params(), learning_rate=lr, momentum=0.9, weight_decay=0.0001)
# 定义loss_scale
scale_factor = 4
scale_window = 3000
loss_scale_manager = ms.amp.DynamicLossScaleManager(scale_factor, scale_window)
# 初始化模型
if device_target == "Ascend":model = Model(net, loss_fn=loss, optimizer=optimizer, loss_scale_manager=loss_scale_manager, metrics={"pixel accuracy": PixelAccuracy(), "mean pixel accuracy": PixelAccuracyClass(), "mean IoU": MeanIntersectionOverUnion(), "frequency weighted IoU": FrequencyWeightedIntersectionOverUnion()})
else:model = Model(net, loss_fn=loss, optimizer=optimizer, metrics={"pixel accuracy": PixelAccuracy(), "mean pixel accuracy": PixelAccuracyClass(), "mean IoU": MeanIntersectionOverUnion(), "frequency weighted IoU": FrequencyWeightedIntersectionOverUnion()})# 设置ckpt文件保存的参数
time_callback = TimeMonitor(data_size=iters_per_epoch)
loss_callback = LossMonitor()
callbacks = [time_callback, loss_callback]
save_steps = 330
keep_checkpoint_max = 5
config_ckpt = CheckpointConfig(save_checkpoint_steps=10,keep_checkpoint_max=keep_checkpoint_max)
ckpt_callback = ModelCheckpoint(prefix="FCN8s",directory="./ckpt",config=config_ckpt)
callbacks.append(ckpt_callback)
model.train(train_epochs, dataset, callbacks=callbacks)输出结果:
Train epoch time: 731878.988 ms, per step time: 640.314 ms
因为FCN网络在训练的过程中需要大量的训练数据和训练轮数,这里只提供了小数据单个epoch的训练来演示loss收敛的过程,下文中使用已训练好的权重文件进行模型评估和推理效果的展示。
模型评估
IMAGE_MEAN = [103.53, 116.28, 123.675]
IMAGE_STD = [57.375, 57.120, 58.395]
DATA_FILE = "dataset/dataset_fcn8s/mindname.mindrecord"# 下载已训练好的权重文件
url = "https://mindspore-website.obs.cn-north-4.myhuaweicloud.com/notebook/datasets/FCN8s.ckpt"
download(url, "FCN8s.ckpt", replace=True)
net = FCN8s(n_class=num_classes)ckpt_file = "FCN8s.ckpt"
param_dict = load_checkpoint(ckpt_file)
load_param_into_net(net, param_dict)if device_target == "Ascend":model = Model(net, loss_fn=loss, optimizer=optimizer, loss_scale_manager=loss_scale_manager, metrics={"pixel accuracy": PixelAccuracy(), "mean pixel accuracy": PixelAccuracyClass(), "mean IoU": MeanIntersectionOverUnion(), "frequency weighted IoU": FrequencyWeightedIntersectionOverUnion()})
else:model = Model(net, loss_fn=loss, optimizer=optimizer, metrics={"pixel accuracy": PixelAccuracy(), "mean pixel accuracy": PixelAccuracyClass(), "mean IoU": MeanIntersectionOverUnion(), "frequency weighted IoU": FrequencyWeightedIntersectionOverUnion()})# 实例化Dataset
dataset = SegDataset(image_mean=IMAGE_MEAN,image_std=IMAGE_STD,data_file=DATA_FILE,batch_size=train_batch_size,crop_size=crop_size,max_scale=max_scale,min_scale=min_scale,ignore_label=ignore_label,num_classes=num_classes,num_readers=2,num_parallel_calls=4)
dataset_eval = dataset.get_dataset()
model.eval(dataset_eval)模型评估结果输出:
{'pixel accuracy': 0.9731097438866125,'mean pixel accuracy': 0.9411368136708896,'mean IoU': 0.8943671693453155,'frequency weighted IoU': 0.9481925166041661}
模型推理
使用训练的网络对模型推理结果进行展示。
import cv2
import matplotlib.pyplot as pltnet = FCN8s(n_class=num_classes)
# 设置超参
ckpt_file = "FCN8s.ckpt"
param_dict = load_checkpoint(ckpt_file)
load_param_into_net(net, param_dict)
eval_batch_size = 4
img_lst = []
mask_lst = []
res_lst = []
# 推理效果展示(上方为输入图片,下方为推理效果图片)
plt.figure(figsize=(8, 5))
show_data = next(dataset_eval.create_dict_iterator())
show_images = show_data["data"].asnumpy()
mask_images = show_data["label"].reshape([4, 512, 512])
show_images = np.clip(show_images, 0, 1)
for i in range(eval_batch_size):img_lst.append(show_images[i])mask_lst.append(mask_images[i])
res = net(show_data["data"]).asnumpy().argmax(axis=1)
for i in range(eval_batch_size):plt.subplot(2, 4, i + 1)plt.imshow(img_lst[i].transpose(1, 2, 0))plt.axis("off")plt.subplots_adjust(wspace=0.05, hspace=0.02)plt.subplot(2, 4, i + 5)plt.imshow(res[i])plt.axis("off")plt.subplots_adjust(wspace=0.05, hspace=0.02)
plt.show()

总结
FCN的核心贡献在于提出使用全卷积层,通过学习让图片实现端到端分割。与传统使用CNN进行图像分割的方法相比,FCN有两大明显的优点:一是可以接受任意大小的输入图像,无需要求所有的训练图像和测试图像具有固定的尺寸。二是更加高效,避免了由于使用像素块而带来的重复存储和计算卷积的问题。
同时FCN网络也存在待改进之处:
一是得到的结果仍不够精细。进行8倍上采样虽然比32倍的效果好了很多,但是上采样的结果仍比较模糊和平滑,尤其是边界处,网络对图像中的细节不敏感。
二是对各个像素进行分类,没有充分考虑像素与像素之间的关系(如不连续性和相似性)。忽略了在通常的基于像素分类的分割方法中使用的空间规整(spatial regularization)步骤,缺乏空间一致性。
引用
[1]Long, Jonathan, Evan Shelhamer, and Trevor Darrell. “Fully convolutional networks for Semantic Segmentation.” Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. 2015.
打卡记录

相关文章:
昇思25天学习打卡营第14天|计算机视觉
昇思25天学习打卡营第14天 文章目录 昇思25天学习打卡营第14天FCN图像语义分割语义分割模型简介网络特点数据处理数据预处理数据加载训练集可视化 网络构建网络流程 训练准备导入VGG-16部分预训练权重损失函数自定义评价指标 Metrics 模型训练模型评估模型推理总结引用 打卡记录…...

将json数组格式转成数组
start cmd [ 27 01 f7 01 24 38 02 b7 42 6e ee 2f 69 46 72 21 74 44 c4 22 7a 92 d8 6a de 66 61 b1 1e 2f de ee 5c 31 57 db df 01 31 2d c9 01 01 c0 FB ] set_ulpk {“jsonrpc”:“2.0”,“type”:2,“id”:0,“method”:“method”,“message”:{“VALUE”:[56,2,183,66…...

接口测试之测试原则、测试用例、测试流程详解
🍅 点击文末小卡片 ,免费获取软件测试全套资料,资料在手,涨薪更快 一、接口的介绍 软件测试中,常说的接口有两种:图形用户接口(GUI,人与程序的接口)、应用程序编程接口&…...
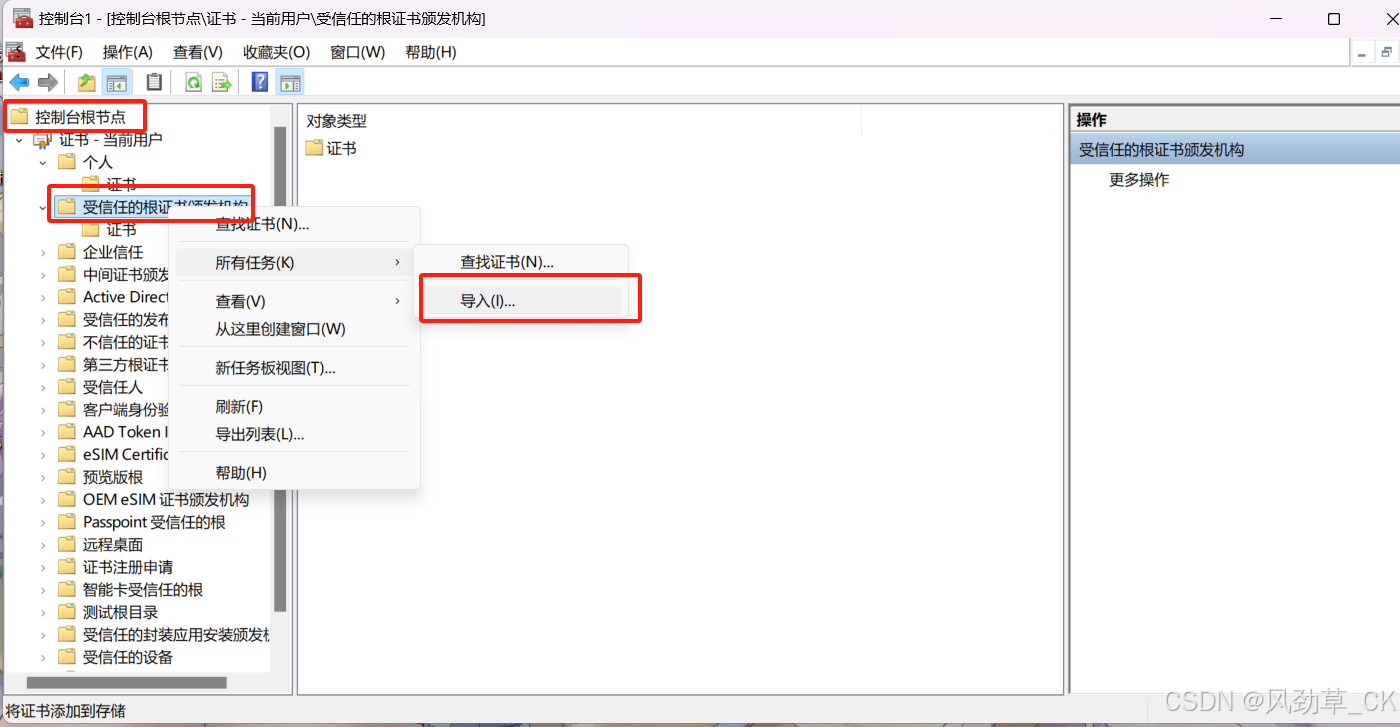
证书上的服务器名错误解决方法
方法 win r ,输入mmc 点击文件——>添加/删除管理单元 找到证书——> 添加 根据自己的存放选择存放位置 点击控制台根节点——> 受信任的根证书颁发机构——>导入 若还出现问题,则参考https://blog.csdn.net/mm120138687/article/details/…...

前端:上传2进制图片
1、let formData new FormData(); 2、添加要传的字段:formData.append("avatarfile", data); (key,value) 3、上传文件 function uploadImg() {// 1定义FormDatalet formData new FormData();// 2添加字段formData.append("…...
)
web前端 React 框架面试200题(三)
面试题 65. 在使用 React Router时,如何获取当前页面的路由或浏览器中地址栏中的地址? 参考回答: 在当前组件的 props中,包含 location属性对象,包含当前页面路由地址信息,在 match中存储当前路由的参数等…...

交流负载箱:电力系统的节能利器
交流负载箱是模拟电网中实际负载的装置,它能够精确地模拟各种电器设备的耗电情况,为电力系统的节能提供了重要的工具。在电力系统中,交流负载箱的应用非常广泛,它可以用于电力系统的设计、运行和维护,以及电力设备的测…...

【思科】链路聚合实验配置和背景
【思科】链路聚合实验配置和背景 背景链路聚合基本概念链路聚合聚合接口 思科链路聚合协议01.PAgP协议02.LACP协议 思科链路聚合模式LACP协议模式PAgP协议模式ON模式 实验准备配置二层链路聚合LACP协议模式SW1SW2PC1PC2查看LACP聚合组建立情况查看LACP聚合端口情况查看逻辑聚合…...

使用 vue-element-plus-admin 框架遇到的问题记录
项目打包遇到的问题: 打包语句:pnpm run build:pro 报错信息: Error: [vite]: Rollup failed to resolve import "E:/workplace_gitee/xxx/node_modules/.pnpm/element-plus2.5.5_vue3.4.15/node_modules/element-plus/es/components…...

从零开始手写STL库:List
从零开始手写STL库–List部分 Github链接:miniSTL 文章目录 从零开始手写STL库–List部分List是什么?List需要包含什么函数1)基础成员函数2)核心功能3)其他功能 基础成员函数的编写核心功能的编写其他功能编写总结 List是什么&am…...

蒙特卡洛采样
目录 蒙特卡洛采样的计算逻辑计算步骤:1. 定义问题2. 确定采样范围3. 生成随机样本点4. 计算函数值5. 估计期望值或积分值6. 计算误差具体示例:1. 定义问题2. 确定采样范围3. 生成随机样本点4. 计算函数值5. 估计积分值6. 计算误差总结蒙特卡洛采样是一种通过随机生成样本点来…...

Apache虚拟主机VirtualHost配置项详解
在Apache中,VirtualHost容器用于定义一个虚拟主机的配置,它允许在单一的物理服务器上托管多个不同的网站,每个网站可以有自己的域名、文档根目录、错误日志等。VirtualHost内的配置项非常灵活,可以包含从基本的网站信息到高级的URL重写和安全设置。 以下是一些常见的Virtu…...

OpenAI从GPT-4V到GPT-4O,再到GPT-4OMini简介
OpenAI从GPT-4V到GPT-4O,再到GPT-4OMini简介 一、引言 在人工智能领域,OpenAI的GPT系列模型一直是自然语言处理的标杆。随着技术的不断进步,OpenAI推出了多个版本的GPT模型,包括视觉增强的GPT-4V(GPT-4 with Vision&…...
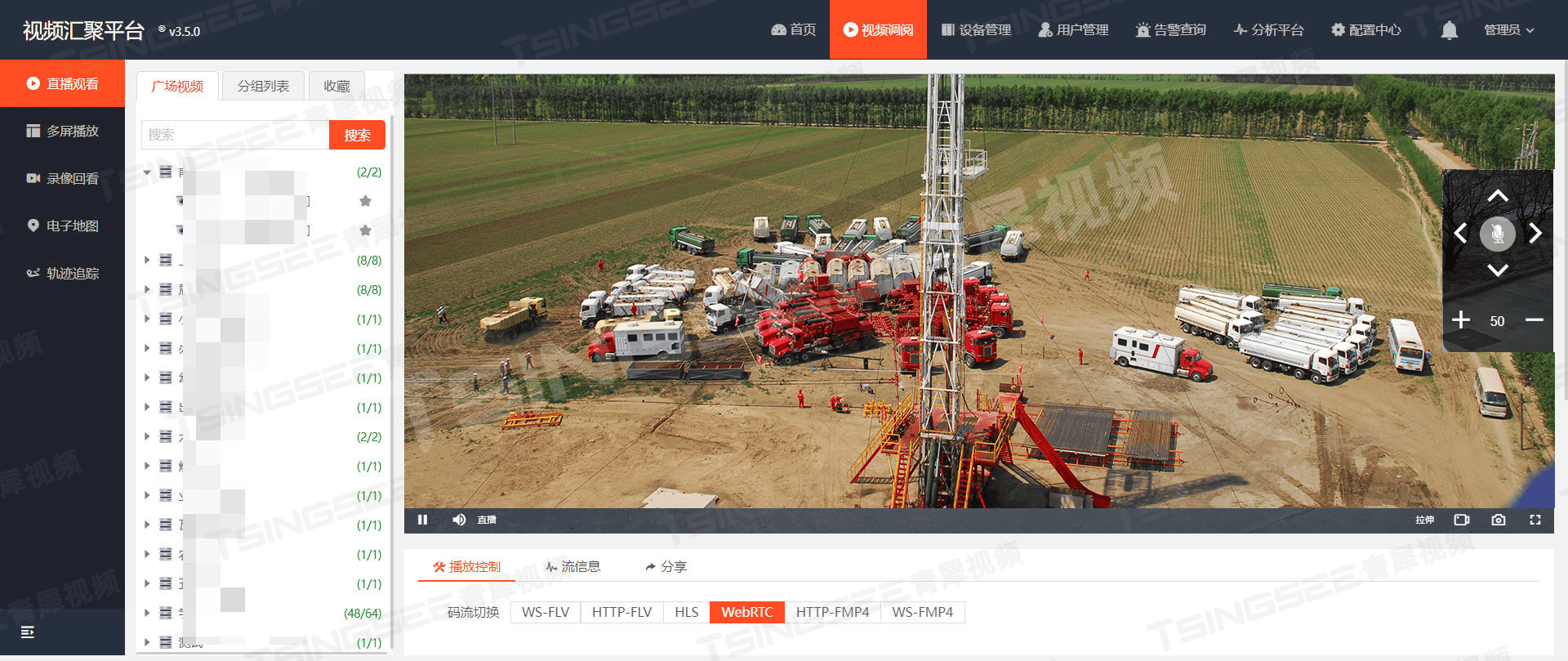
从人工巡检到智能防控:智慧油气田安全生产的新视角
一、背景需求 随着科技的飞速发展,视频监控技术已成为各行各业保障安全生产、提升管理效率的重要手段。特别是在油气田这一特殊领域,由于其工作环境复杂、安全风险高,传统的监控方式已难以满足实际需求。因此,基于视频监控AI智能…...

【黑马java基础】Lamda, 方法引用,集合{Collection(List, Set), Map},Stream流
文章目录 JDK8新特性:Lambda表达式认识Lambda表达式Lambda表达式的省略规则 JDK8新特性:方法引用静态方法的引用实例方法的引用特定类型方法的引用构造器的应用 集合➡️Collection单列集合体系Collection的常用方法Collection的遍历方法迭代器增强for循…...

Stable Diffusion 使用详解(1)---- 提示词及相关参数
目录 背景 提示词 内容提示词 人物及主体特征 场景 环境光照 画幅视角 注意事项及示例 标准化提示词 画质等级 风格与真实性 具体要求 背景处理 光线与色彩 负向提示词 小结 常用工具 另外几个相关参数 迭代步数 宽度与高度 提示词引导系数 图片数量 背景…...
 - 无序数组排序后的最大相邻差)
数据结构和算法(刷题) - 无序数组排序后的最大相邻差
无序数组排序后的最大相邻差 问题:一个无序的整型数组,求出该数组排序后的任意两个相邻元素的最大差值?要求时间和空间复杂度尽可能低。 三种方法: 排序后计算比较 简介:用任意一种时间复杂度为 O ( n log n ) O…...

HOW - React 处理不紧急的更新和渲染
目录 useDeferredValueuseTransitionuseIdleCallback 在 React 中,有一些钩子函数可以帮助你处理不紧急的更新或渲染,从而优化性能和用户体验。 以下是一些常用的相关钩子及其应用场景: useDeferredValue 用途:用于处理高优先级…...

基于A律压缩的PCM脉冲编码调制通信系统simulink建模与仿真
目录 1.算法运行效果图预览 2.算法运行软件版本 3.部分核心程序 4.算法理论概述 4.1A律压缩的原理 4.2 PCM编码过程 4.3 量化噪声与信噪比 5.算法完整程序工程 1.算法运行效果图预览 (完整程序运行后无水印) 2.算法运行软件版本 matlab2022a 3.部分核心程序 &#…...
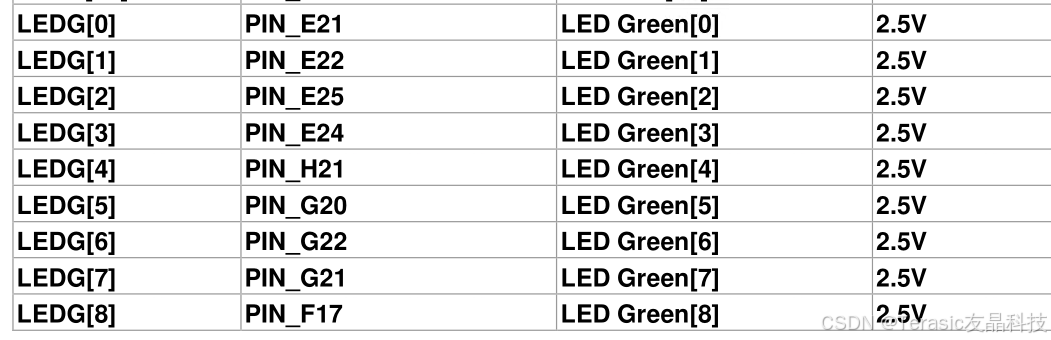
【入门教程一】基于DE2-115的My First FPGA 工程
1.1. 概述 这是一个简单的练习, 可以帮助初学者开始了解如何使用Intel Quartus 软件进行 FPGA 开发。 在本章节中,您将学习如何编译 Verilog 代码,进行引脚分配,创建时序约束,然后对 FPGA 进行编程,驱动开…...
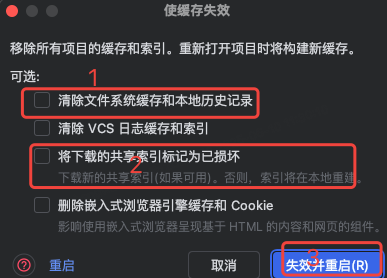
idea大量爆红问题解决
问题描述 在学习和工作中,idea是程序员不可缺少的一个工具,但是突然在有些时候就会出现大量爆红的问题,发现无法跳转,无论是关机重启或者是替换root都无法解决 就是如上所展示的问题,但是程序依然可以启动。 问题解决…...

【OSG学习笔记】Day 18: 碰撞检测与物理交互
物理引擎(Physics Engine) 物理引擎 是一种通过计算机模拟物理规律(如力学、碰撞、重力、流体动力学等)的软件工具或库。 它的核心目标是在虚拟环境中逼真地模拟物体的运动和交互,广泛应用于 游戏开发、动画制作、虚…...

在鸿蒙HarmonyOS 5中实现抖音风格的点赞功能
下面我将详细介绍如何使用HarmonyOS SDK在HarmonyOS 5中实现类似抖音的点赞功能,包括动画效果、数据同步和交互优化。 1. 基础点赞功能实现 1.1 创建数据模型 // VideoModel.ets export class VideoModel {id: string "";title: string ""…...

关于nvm与node.js
1 安装nvm 安装过程中手动修改 nvm的安装路径, 以及修改 通过nvm安装node后正在使用的node的存放目录【这句话可能难以理解,但接着往下看你就了然了】 2 修改nvm中settings.txt文件配置 nvm安装成功后,通常在该文件中会出现以下配置&…...

为什么需要建设工程项目管理?工程项目管理有哪些亮点功能?
在建筑行业,项目管理的重要性不言而喻。随着工程规模的扩大、技术复杂度的提升,传统的管理模式已经难以满足现代工程的需求。过去,许多企业依赖手工记录、口头沟通和分散的信息管理,导致效率低下、成本失控、风险频发。例如&#…...

pam_env.so模块配置解析
在PAM(Pluggable Authentication Modules)配置中, /etc/pam.d/su 文件相关配置含义如下: 配置解析 auth required pam_env.so1. 字段分解 字段值说明模块类型auth认证类模块,负责验证用户身份&am…...
【大模型RAG】Docker 一键部署 Milvus 完整攻略
本文概要 Milvus 2.5 Stand-alone 版可通过 Docker 在几分钟内完成安装;只需暴露 19530(gRPC)与 9091(HTTP/WebUI)两个端口,即可让本地电脑通过 PyMilvus 或浏览器访问远程 Linux 服务器上的 Milvus。下面…...

2025 后端自学UNIAPP【项目实战:旅游项目】6、我的收藏页面
代码框架视图 1、先添加一个获取收藏景点的列表请求 【在文件my_api.js文件中添加】 // 引入公共的请求封装 import http from ./my_http.js// 登录接口(适配服务端返回 Token) export const login async (code, avatar) > {const res await http…...
)
Android第十三次面试总结(四大 组件基础)
Activity生命周期和四大启动模式详解 一、Activity 生命周期 Activity 的生命周期由一系列回调方法组成,用于管理其创建、可见性、焦点和销毁过程。以下是核心方法及其调用时机: onCreate() 调用时机:Activity 首次创建时调用。…...
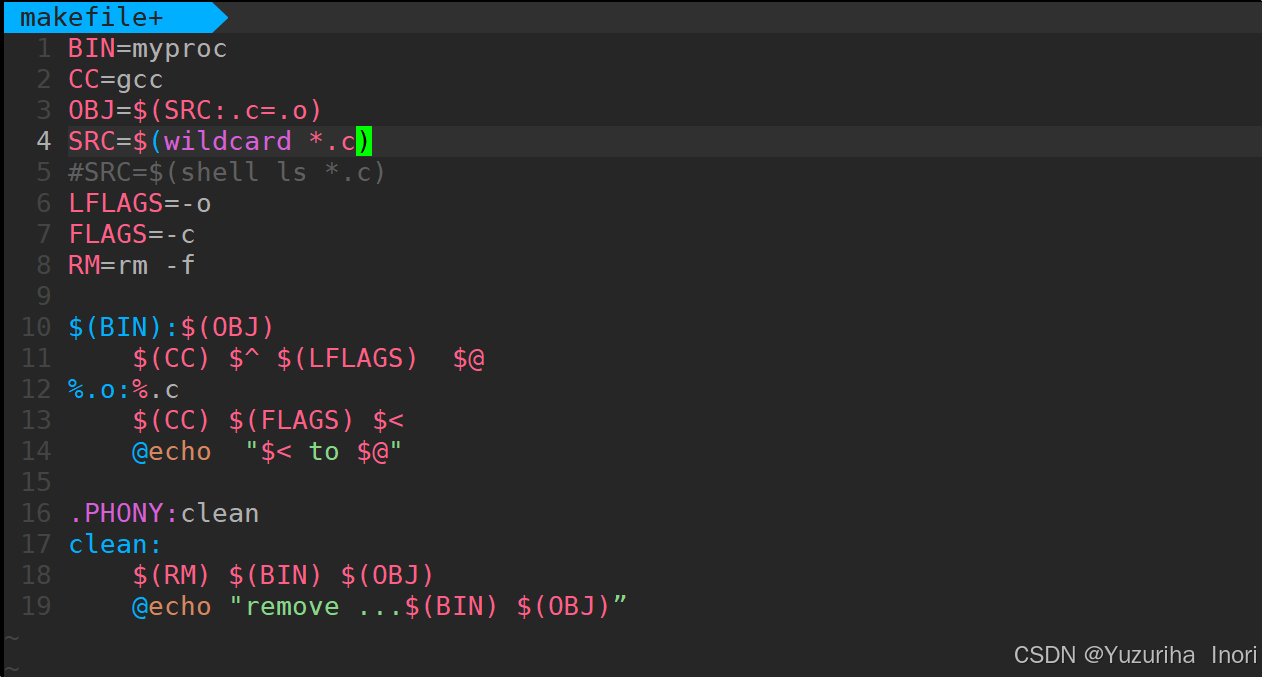
【Linux】自动化构建-Make/Makefile
前言 上文我们讲到了Linux中的编译器gcc/g 【Linux】编译器gcc/g及其库的详细介绍-CSDN博客 本来我们将一个对于编译来说很重要的工具:make/makfile 1.背景 在一个工程中源文件不计其数,其按类型、功能、模块分别放在若干个目录中,mak…...