verilog bug记录——正点原子spi_drive存在的问题
verilog bug记录——正点原子spi_drive存在的问题
- 问题概述
- 代码修改—spi_drive.v
- 遗留问题
问题概述
因为项目需求,需要利用spi对flash进行擦除和写入操作,所使用的开发板是正电原子的达芬奇开发板,我事先往Flash里面存了两个bit,分别对应LED0和LED1的点亮,但是我使用了正点原子的spi_dirve进行全擦除操作之后发现了很奇怪的现象:
1、没擦完,因为明显的看到LED1的灯亮了,说明擦除操作或许有效,但是可能只是破坏了第一个bit,第二个bit没有做修改;
2、时序不对,通过ila抓波形可以发现,全擦除之后的轮询寄存器,竟然只查了一次就自动跳出轮询的状态了,但是全擦除怎么说也不至于这么快吧。
我的flash_contol部分的指令操作顺序如下:
always @(*)begincase(cmd_cnt)0 : spi_cmd = WEL_CMD ; //写使能1 : spi_cmd = R_STA_REG_CMD ; //轮询2 : spi_cmd = WEL_CMD ; //写使能3 : spi_cmd = R_STA_REG_CMD ; //轮询4 : spi_cmd = BE_CMD ; //全擦除5 : spi_cmd = R_STA_REG_CMD ; //轮询6 : spi_cmd = WEL_CMD ; //轮询7 : spi_cmd = R_STA_REG_CMD ; //读数据default:;endcase
end
我只执行了0~5步,另外原代码中指令运行是一上电就会自动运行,但是我改成了只有我按键按下的时候才会执行。
出问题的时序如下:

从图中黄线部分可以看到,CS信号在spi_clk信号立即拉高,但是我们看数据手册可以发现


在spi_clk停止输出的时候,CS信号至少要间隔4ns才拉高,虽然说实际上的时钟信号并不是理想的马上拉高,而是有一段过渡时间,但是这个过渡时间并不好把控,所以稳妥起见还是应该至少打一拍,因为时钟频率是100MHz,那么延迟未0.01us,即10ns,是满足时序要求的;
另外还有问题,看下图:


红圈标注的位置,从图中可以看出,我第一次发送写使能命令后进行轮询,会发现状态寄存器的第6位WEL并没有拉高,而是第二次发送写使能命令的时候才拉高。
根据数据手册上的要求,发送完写使能命令后,WEL位是应该拉高为高电平的

最后一个问题如下图所示:

该时序图是我我发送完全擦除指令随即发送轮询寄存器指令(读状态寄存器指令),会发现蓝线部分表示WEL位,红线部分表示WIP位,此时WIP位应该是高电平,轮询寄存器应该继续轮询才对,直到WIP为0表示擦除操作已完成,但是原代码中却是直接拉高,这就不合理。
代码修改—spi_drive.v
//****************************************Copyright (c)***********************************//
//原子哥在线教学平台:www.yuanzige.com
//技术支持:www.openedv.com
//淘宝店铺:http://openedv.taobao.com
//关注微信公众平台微信号:"正点原子",免费获取ZYNQ & FPGA & STM32 & LINUX资料。
//版权所有,盗版必究。
//Copyright(C) 正点原子 2018-2028
//All rights reserved
//----------------------------------------------------------------------------------------
// File name: spi_drive
// Last modified Date: 2020/12/01 10:39:20
// Last Version: V1.0
// Descriptions: FLASH读写实验
//
//----------------------------------------------------------------------------------------
// Created by: 正点原子
// Created date: 2020/12/01 10:39:20
// Version: V1.0
// Descriptions: The original version
//
//----------------------------------------------------------------------------------------
//****************************************************************************************//
module spi_drive(input clk_100m ,input sys_rst_n ,//user interfaceinput spi_start ,//spi开启使能。input [7:0 ] spi_cmd ,//FLAH操作指令input [23:0] spi_addr ,//FLASH地址input [7:0 ] spi_data ,//FLASH写入的数据input [3:0 ] cmd_cnt ,//指令计数器output idel_flag_p ,//空闲状态标志的上升沿 output reg w_data_req ,//FLASH写数据请求 output reg error_flag ,//读出的数据错误标志//spi interfaceoutput reg spi_cs ,//SPI从机的片选信号,低电平有效。output reg spi_clk ,//主从机之间的数据同步时钟。output reg spi_mosi ,//数据引脚,主机输出,从机输入。input spi_miso //数据引脚,主机输入,从机输出。);//define parameter
//状态机
parameter IDLE = 4'd0; //空闲状态
parameter WR_EN = 4'd1; //写使能状态
parameter S_ERA = 4'd2; //扇区擦除状态
parameter B_ERA = 4'd3; //全局擦除
parameter READ = 4'd4; //读状态
parameter WRITE = 4'd5; //写状态
parameter R_STA_REG = 4'd6; //读状态寄存器状态
//指令集
parameter WEL_CMD = 8'h06; //写使能指令
parameter SE_CMD = 8'hd8; //扇区擦除指令
parameter BE_CMD = 8'hc7; //全擦除指令
parameter READ_CMD = 8'h03; //读指令
parameter WRITE_CMD = 8'h02; //写指令
parameter R_STA_REG_CMD = 8'h05; //读状态寄存器指令//wire define
wire idel_flag;//reg define
reg idel_flag_d0 ;
reg idel_flag_d1 ;
reg spi_clk_d0 ;
reg [3:0] current_state ;
reg [3:0] next_state ;
reg [7:0 ] data_reg ; //数据寄存
reg [7:0 ] cmd_reg ; //指令寄存
reg [23:0] addr_reg ; //地址寄存器
reg [31:0] bit_cnt ; //bit计数器
reg clk_cnt ; //时钟计数器
reg delay_cnt ; //延迟计数器
reg [15:0] delay_state_cnt ; //状态延迟计数器
reg [7:0 ] rd_data_reg ; //读数据寄存器
reg stdone ; //状态完成标志
reg [7:0 ] data_check ; //数据校验reg [2047:0] r_w_data ;
reg r_w_data_req ;
reg [2047:0] r_r_data ;//FLASH读出的数据reg r_wip_flag ;
reg [7 :0 ] r_rd_status_reg;
reg r_wel ;
//*****************************************************
//** main code
//*****************************************************assign idel_flag = (current_state == IDLE) ? 1:0; //空闲状态标志
assign idel_flag_p = idel_flag_d0 && (~idel_flag_d1); //空闲状态标志的上升沿//idel_flga打拍取沿
always @(posedge clk_100m or negedge sys_rst_n )beginif(!sys_rst_n)beginidel_flag_d0 <= 1'b1;idel_flag_d1 <= 1'b1;endelse beginidel_flag_d0 <= idel_flag;idel_flag_d1 <= idel_flag_d0;end
end//写数据请求信号
always @(posedge clk_100m or negedge sys_rst_n )beginif(!sys_rst_n)w_data_req <= 1'b0;else if(current_state == WRITE && (bit_cnt+2)%8 == 0 && bit_cnt >= 30 && clk_cnt == 0)w_data_req <= 1'b1;elsew_data_req <= 1'b0;
endalways @(posedge clk_100m or negedge sys_rst_n )beginif(!sys_rst_n)r_w_data_req <= 'd0;elser_w_data_req <= w_data_req;
endalways @(posedge clk_100m or negedge sys_rst_n )beginif(!sys_rst_n)r_w_data <= 'd0;else if(r_w_data_req)r_w_data <= {r_w_data[2039:0],spi_data};
end//读出的数据移位寄存
always @(posedge clk_100m or negedge sys_rst_n )begin if(!sys_rst_n)rd_data_reg <= 8'd0;else if(current_state == READ && bit_cnt >= 32 && bit_cnt <= 2080 && clk_cnt == 0) rd_data_reg <= {rd_data_reg[6:0],spi_miso};elserd_data_reg <= rd_data_reg;
end// //检查读出的数据是否正确
// always @(posedge clk_100m or negedge sys_rst_n )begin
// if(!sys_rst_n)
// data_check <= 8'd0;
// else if(current_state == READ && bit_cnt%8 == 0 && bit_cnt >= 40 && clk_cnt == 1)
// data_check <= data_check + 1'd1;
// else
// data_check <= data_check;
// end//读出的数据
always @(posedge clk_100m or negedge sys_rst_n )beginif(!sys_rst_n)r_r_data <= 2048'd0;else if(current_state == READ && bit_cnt%8 == 0 && bit_cnt >38 && clk_cnt==1)r_r_data <= {r_r_data[2039:0],rd_data_reg};elser_r_data <= r_r_data;
end//读出的数据错误标志
always @(posedge clk_100m or negedge sys_rst_n )beginif(!sys_rst_n)error_flag<=1'd0;else if(current_state == READ && cmd_cnt == 6 && idel_flag_p)beginif(r_r_data!=r_w_data)error_flag <= 1'd1;elseerror_flag <= error_flag;endelseerror_flag <= error_flag;
end//数据寄存器
always @(posedge clk_100m or negedge sys_rst_n )beginif(!sys_rst_n)data_reg <= 8'd0;else if((bit_cnt + 1'd1)%8 == 0 && bit_cnt > 30 && clk_cnt == 1)data_reg <= spi_data;else if(current_state == WRITE && clk_cnt == 1 && bit_cnt >= 32)data_reg <= {data_reg[6:0],data_reg[7]};elsedata_reg <= data_reg;
end//指令寄存器
always @(posedge clk_100m or negedge sys_rst_n )beginif(!sys_rst_n)cmd_reg <= 8'd0;else if(spi_cs == 0 && delay_cnt == 0)cmd_reg <= spi_cmd;else if((clk_cnt == 1) && (current_state == WR_EN || current_state == S_ERA|| current_state == B_ERA || current_state == READ || current_state == WRITE || current_state == R_STA_REG) && (bit_cnt < 8))cmd_reg <= {cmd_reg[6:0],1'b1};elsecmd_reg <= cmd_reg;
end//地址寄存器
always @(posedge clk_100m or negedge sys_rst_n )beginif(!sys_rst_n)addr_reg <= 8'd0;else if(spi_cs == 0 && delay_cnt == 0)addr_reg <= spi_addr;else if(clk_cnt==1 && (current_state == READ || current_state == WRITE) && bit_cnt >= 8 && bit_cnt < 32)addr_reg <= {addr_reg[22:0],addr_reg[23]};elseaddr_reg <= addr_reg;
end//时钟计数器
always @(posedge clk_100m or negedge sys_rst_n )beginif(!sys_rst_n)clk_cnt <= 1'd0;else if(delay_cnt==1)clk_cnt <= clk_cnt+1'd1;else clk_cnt <= 1'd0;
end //延迟标志
always @(posedge clk_100m or negedge sys_rst_n )beginif(!sys_rst_n)delay_cnt <= 1'd0;else if(spi_cs == 0)beginif(delay_cnt < 1)delay_cnt <= delay_cnt + 1'd1;elsedelay_cnt <= delay_cnt;endelsedelay_cnt <= 1'd0;
end//状态延迟计数器
always @(posedge clk_100m or negedge sys_rst_n )beginif(!sys_rst_n)delay_state_cnt <= 1'd0;else if(spi_start)delay_state_cnt <= 1'd0;else if(spi_cs)beginif(delay_state_cnt < 20)delay_state_cnt <= delay_state_cnt + 1'd1;elsedelay_state_cnt <= delay_state_cnt;endelsedelay_state_cnt <= 1'd0;
end//bit计数器
always @(posedge clk_100m or negedge sys_rst_n )beginif(!sys_rst_n)bit_cnt <= 16'd0;else if(delay_cnt == 1)beginif(clk_cnt == 1'b1)bit_cnt <= bit_cnt+1'd1;elsebit_cnt <= bit_cnt;endelsebit_cnt <= 16'd0;
end// RDSR状态寄存器寄存
always @(posedge clk_100m or negedge sys_rst_n )begin if(!sys_rst_n)r_rd_status_reg <= 8'd0;else if(current_state == R_STA_REG && bit_cnt >= 8 && clk_cnt == 1)r_rd_status_reg <= {r_rd_status_reg[6:0],spi_miso};elser_rd_status_reg <= r_rd_status_reg;
end//三段式状态机
always @(posedge clk_100m or negedge sys_rst_n )beginif(!sys_rst_n)current_state <= IDLE;elsecurrent_state <= next_state;
endalways @(*)begincase(current_state)IDLE: beginif(spi_start && spi_cmd == WEL_CMD)next_state = WR_EN;else if(spi_start && spi_cmd == BE_CMD)next_state = B_ERA;else if(spi_start && spi_cmd == SE_CMD)next_state = S_ERA;else if(spi_start && spi_cmd == READ_CMD)next_state = READ;else if(spi_start && spi_cmd == WRITE_CMD)next_state = WRITE;else if(spi_start && spi_cmd == R_STA_REG_CMD)next_state = R_STA_REG;elsenext_state = IDLE;endWR_EN: beginif(stdone && bit_cnt >= 8)next_state = IDLE;elsenext_state = WR_EN;endS_ERA: beginif(stdone)next_state = IDLE;elsenext_state = S_ERA;endB_ERA: begin if(stdone)next_state = IDLE;elsenext_state = B_ERA;endREAD: begin if(stdone && bit_cnt >= 8)next_state = IDLE;elsenext_state = READ;endWRITE: begin if(stdone && bit_cnt >= 8)next_state = IDLE;elsenext_state = WRITE;endR_STA_REG: begin if(stdone)next_state = IDLE;elsenext_state = R_STA_REG;enddefault: next_state = IDLE; endcase
endalways @(posedge clk_100m or negedge sys_rst_n )beginif(!sys_rst_n) beginspi_cs <= 1'b1;spi_clk <= 1'b0;spi_clk_d0 <= 1'b0;spi_mosi <= 1'b0; stdone <= 1'b0; endelse begincase(current_state)IDLE: beginstdone <= 1'b0;spi_cs <= 1'b1;spi_clk <= 1'b0;spi_mosi <= 1'b0; r_wip_flag <= 1'b0; spi_clk_d0 <= 'd0;endWR_EN: beginstdone <= 1'b0;if(delay_state_cnt == 10) spi_cs <= 1'b0;else if(delay_cnt == 1 && bit_cnt < 8) begin spi_clk_d0 <= ~spi_clk_d0;spi_clk <= spi_clk_d0;spi_mosi <= cmd_reg[7];endelse if(bit_cnt == 8 && clk_cnt == 0)beginstdone <= 1'b1;spi_clk <= 1'b0; spi_mosi <= 1'b0; endelse if(bit_cnt == 8 && clk_cnt == 1)beginspi_cs <= 1'b1; endendB_ERA: beginstdone <= 1'b0;if(delay_state_cnt == 10) spi_cs <= 1'b0;else if(delay_cnt == 1 && bit_cnt < 8) begin spi_clk_d0 <= ~spi_clk_d0;spi_clk <= spi_clk_d0;spi_mosi <= cmd_reg[7];endelse if(bit_cnt == 8 && clk_cnt == 0)beginstdone <= 1'b1; spi_clk <= 1'b0;spi_mosi <= 1'b0; endelse if(bit_cnt == 8 && clk_cnt == 1)beginspi_cs <= 1'b1; endendS_ERA: beginstdone <= 1'b0; if(delay_state_cnt == 10) spi_cs <= 1'b0;else if(delay_cnt == 1 && bit_cnt < 8) begin spi_clk_d0 <= ~spi_clk_d0;spi_clk <= spi_clk_d0;spi_mosi <= cmd_reg[7];endelse if(bit_cnt >= 8&& bit_cnt < 32 && spi_cs == 0)beginspi_cs <= 1'b0;spi_clk_d0 <= ~spi_clk_d0;spi_clk <= spi_clk_d0;spi_mosi <= addr_reg[23];endelse if(bit_cnt == 32 && clk_cnt == 0) beginspi_cs <= 1'b1;spi_clk <= 1'b0;spi_mosi <= 1'b0;stdone <= 1'b1;endendREAD: beginstdone <= 1'b0;if(delay_state_cnt == 10) spi_cs <= 1'b0;else if(delay_cnt == 1 && bit_cnt < 8) begin spi_clk_d0 <= ~spi_clk_d0;spi_clk <= spi_clk_d0;spi_mosi <= cmd_reg[7];endelse if(bit_cnt >= 8 && bit_cnt < 32 && spi_cs == 0)begin spi_clk_d0 <= ~spi_clk_d0;spi_clk <= spi_clk_d0;spi_mosi <= addr_reg[23];endelse if(bit_cnt >= 32 && bit_cnt < 2080)begin spi_clk_d0 <= ~spi_clk_d0;spi_clk <= spi_clk_d0;spi_mosi <= 1'b0; endelse if(bit_cnt == 2080 && clk_cnt == 0) begin spi_clk <= 1'b0;spi_mosi <= 1'b0;stdone <= 1'b1; endelse if(bit_cnt == 2080 && clk_cnt == 1) beginspi_cs<=1'b1;endendWRITE: beginstdone<=1'b0;if(delay_state_cnt == 10) spi_cs <= 1'b0;else if(delay_cnt == 1 && bit_cnt < 8) begin spi_clk_d0 <= ~spi_clk_d0;spi_clk <= spi_clk_d0;spi_mosi <= cmd_reg[7];endelse if(bit_cnt >= 8 && bit_cnt < 32 && spi_cs == 0)begin spi_clk_d0 <= ~spi_clk_d0;spi_clk <= spi_clk_d0;spi_mosi <= addr_reg[23];endelse if(bit_cnt >= 32 && bit_cnt < 2080)begin spi_clk_d0 <= ~spi_clk_d0;spi_clk <= spi_clk_d0;spi_mosi <= data_reg[7];endelse if(bit_cnt == 2080 && clk_cnt == 0) beginspi_clk <= 1'b0;spi_mosi <= 1'b0;stdone <= 1'b1;endelse if(bit_cnt == 2080 && clk_cnt == 1) beginspi_cs <= 1'b1;endendR_STA_REG:begin stdone <= 1'b0;if(delay_state_cnt == 10) spi_cs <= 1'b0;else if(delay_cnt == 1 && bit_cnt < 8)begin spi_clk_d0 <= ~spi_clk_d0;spi_clk <= spi_clk_d0;spi_mosi <= cmd_reg[7];endelse if(bit_cnt == 8)begin spi_clk_d0 <= ~spi_clk_d0;spi_clk <= spi_clk_d0;spi_mosi <= 1'b0; end else if(~spi_miso && bit_cnt % 8==0 && bit_cnt > 8 && clk_cnt == 0)beginr_wip_flag <= 1'b1;spi_clk_d0 <= ~spi_clk_d0;spi_clk <= spi_clk_d0;endelse if(r_wip_flag && ~spi_miso && bit_cnt % 8==0 && bit_cnt > 8 && clk_cnt == 1)beginspi_clk <= 1'b0;spi_cs <= 1'b1;stdone <= 1'b1;endelse if(~spi_cs && delay_cnt == 1)beginspi_clk_d0 <= ~spi_clk_d0;spi_clk <= spi_clk_d0;end end default: beginstdone <= 1'b0;spi_cs <= 1'b1;spi_clk <= 1'b0;spi_clk_d0 <= 1'b0;spi_mosi <= 1'b0; endendcaseend
endila_spi u_ila_spi (.clk(clk_100m), // input wire clk.probe0(spi_start), // input wire [0:0] probe0 .probe1(spi_cmd ), // input wire [7:0] probe1 .probe2(spi_addr ), // input wire [23:0] probe2 .probe3(spi_data ), // input wire [7:0] probe3 .probe4(cmd_cnt ), // input wire [3:0] probe4 .probe5(idel_flag_p), // input wire [0:0] probe5 .probe6(w_data_req ), // input wire [0:0] probe6 .probe7(error_flag ), // input wire [0:0] probe7 .probe8(spi_cs ), // input wire [0:0] probe8 .probe9(spi_clk ), // input wire [0:0] probe9 .probe10(spi_mosi), // input wire [0:0] probe10 .probe11(spi_miso), // input wire [0:0] probe11.probe12(idel_flag), // input wire [0:0] probe12 .probe13(idel_flag_d0), // input wire [0:0] probe13 .probe14(idel_flag_d1), // input wire [0:0] probe14 .probe15(spi_clk_d0 ), // input wire [0:0] probe15 .probe16(current_state ), // input wire [3:0] probe16 .probe17(next_state ), // input wire [3:0] probe17 .probe18(data_reg ), // input wire [7:0] probe18 .probe19(cmd_reg ), // input wire [7:0] probe19 .probe20(addr_reg ), // input wire [23:0] probe20 .probe21(bit_cnt ), // input wire [31:0] probe21 .probe22(clk_cnt ), // input wire [0:0] probe22 .probe23(delay_cnt ), // input wire [0:0] probe23 .probe24(delay_state_cnt), // input wire [15:0] probe24 .probe25(rd_data_reg ), // input wire [7:0] probe25 .probe26(stdone ), // input wire [0:0] probe26 .probe27(data_check ), // input wire [7:0] probe27 .probe28(r_w_data_req), // input wire [0:0] probe28.probe29(r_wip_flag)
);endmodule
修改后的代码核心在于判断轮询寄存器那里,以及spi_clk_d0每次在idle状态的时候都要清零,清零这个步骤是在为了确保每次新的指令来时,时钟状态都能从0开始(由SPI的驱动模式决定);
R_STA_REG:begin stdone <= 1'b0;if(delay_state_cnt == 10) spi_cs <= 1'b0;else if(delay_cnt == 1 && bit_cnt < 8)begin spi_clk_d0 <= ~spi_clk_d0;spi_clk <= spi_clk_d0;spi_mosi <= cmd_reg[7];endelse if(bit_cnt == 8)begin spi_clk_d0 <= ~spi_clk_d0;spi_clk <= spi_clk_d0;spi_mosi <= 1'b0; end else if(~spi_miso && bit_cnt % 8==0 && bit_cnt > 8 && clk_cnt == 0)beginr_wip_flag <= 1'b1;spi_clk_d0 <= ~spi_clk_d0;spi_clk <= spi_clk_d0;endelse if(r_wip_flag && ~spi_miso && bit_cnt % 8==0 && bit_cnt > 8 && clk_cnt == 1)beginspi_clk <= 1'b0;spi_cs <= 1'b1;stdone <= 1'b1;endelse if(~spi_cs && delay_cnt == 1)beginspi_clk_d0 <= ~spi_clk_d0;spi_clk <= spi_clk_d0;end end
主要修改的就是这里,思路是:
我会首先判断WIP位是否为0,如果为0,则把r_wip_flag标志位拉高,等到下一次轮询状态寄存器的时候就可以跳出当前轮询寄存器的状态。
修改后的时序如下:

可以看到擦除命令执行完之后,还需要等待一段时间后才会完成擦除,擦除后的时序为:


即回到初始状态。
遗留问题
其实从上面波形中可以看到,仍然是第二次发送写指令的时候,WEL位才会拉高,目前猜测是flash本身的问题,之后的思路可以改成直到WEL位拉高后才执行之后的擦除或者写命令,否则就会一直发送写使能指令,直到WEL拉高。
目前可以暂时改成发送两次写使能
相关文章:
verilog bug记录——正点原子spi_drive存在的问题
verilog bug记录——正点原子spi_drive存在的问题 问题概述代码修改—spi_drive.v遗留问题 问题概述 因为项目需求,需要利用spi对flash进行擦除和写入操作,所使用的开发板是正电原子的达芬奇开发板,我事先往Flash里面存了两个bit,…...

vue+watermark-dom实现页面水印效果
前言 页面水印大家应该都不陌生,它可以用于验证数字媒体的来源和完整性,还可以用于版权保护和信息识别,这些信息可以在不影响媒体质量的情况下嵌入,并在需要时进行提取。本文将通过 vue 结合 watermark-dom 库,教大…...

为什么要学习网安技术?
学习网络安全(网安)技术在当今社会变得尤为重要,这主要源于以下几个方面的原因: 保护个人隐私:随着互联网的普及,个人信息如姓名、地址、电话号码、甚至银行账户信息等都在网络上留下了痕迹。学习网安技术可…...

2024春秋杯网络安全联赛夏季赛Crypto(AK)解题思路及用到的软件
2024春秋杯网络安全联赛夏季赛Crypto(AK) 2024春秋杯网络安全联赛夏季赛Crypto解题思路以及用到的软件 所有题用到的软件 1.vm(虚拟机kali)和Ubuntu,正常配置即可B站有很多。 2.Visual Studio Code(里面要配置python,crypto库和Sagemath数学软件系统S…...

vue2 使用代码编辑器插件 vue-codemirror
vue 使用代码编辑器插件 vue-codemirror 之前用过一次,当时用的一知半解的,所以也没有成文,前几天又因为项目有需求,所以说有用了一次,当然,依旧是一知半解,但是还是稍微写一下子吧!…...

自动驾驶系列—智能巡航辅助功能中的横向避让功能介绍
自动驾驶系列—智能巡航辅助功能中的车道中央保持功能介绍 自动驾驶系列—智能巡航辅助功能中的车道变换功能介绍 自动驾驶系列—智能巡航辅助功能中的横向避让功能介绍 自动驾驶系列—智能巡航辅助功能中的路口通行功能介绍 文章目录 1. 背景介绍2. 功能定义3. 功能原理4. 传感…...
重置变量时,会影响到引用了props或methods的变量)
通过this.$options.data()重置变量时,会影响到引用了props或methods的变量
之前的文章我有提到过通过this.$options.data().具体某个值来将该值进行初始化 但我在项目中遇到了一个问题: 具体情况是:在data中定义一个变量时有用到methods中的一个方法,在后续的方法中我通过this. $options.data.值去重置了另一个数据&…...
[PM]产品运营
生命周期 运营阶段 主要工作 拉新 新用户的定义 冷启动 拉新方式 促活 用户活跃的原因 量化活跃度 运营社区化/内容化 留存 用户流失 培养用户习惯 用户挽回 变现 变现方式 付费模式 广告模式 数据变现 变现指标 传播 营销 认识营销 电商营销中心 拼团活动 1.需求整理 2.…...

流程控制语句
目录 前言 一、SET 语句 二、BEGIN END 语句 三、IF ELSE 语句 四、CASE 语句 五、WHILE 语句 六、GOTO 语句 七、RETURN 语句 前言 T-SQL 提供了用于编写过程性代码的语法结构,可用来进行顺序、分支、循环、存储过程等程序设计,编写结构化的模…...

杰发科技AC7840——SENT数据解析及软件Sent发送的实现
0. 测试环境 AC7840官方Demo板; 图莫斯0503 DSlogic U2Basic 使用引脚 输出脚:PB1 时钟:PB2,其他引脚可以不初始化,不接线 1. 数据解析 以下是SENT数据的格式(1tick以3us为例)&#…...

Java后端开发(十五)-- Ubuntu 开启activemq开机自启动功能
目录 1. 修改Wrapper.conf文件配置内容 2. 在/etc/systemd/system目录下创建activemq.service文件 3. 重启服务器,验证是否生效 4. 系统启动目标问题 操作环境: 1、Ubuntu 22.04.4 LTS (GNU/Linux 6.5.0-28-generic x86_64) 2、jdk17.0.11 3、apache-activemq-6.0.1 1. 修…...

56 网络层
本节重点 理解网络层的作用,深入理解IP协议的基本原理 对整个TCP/IP协议有系统的理解 对TCP/IP协议体系下的其他重要协议和技术有一定的了解 目录 前置认识ip协议基本概念协议头格式网段划分特殊的ip地址ip地址的数量限制私有ip和公有ip路由路由表生成算法 在复杂…...
MAC地址泛洪——华为ensp
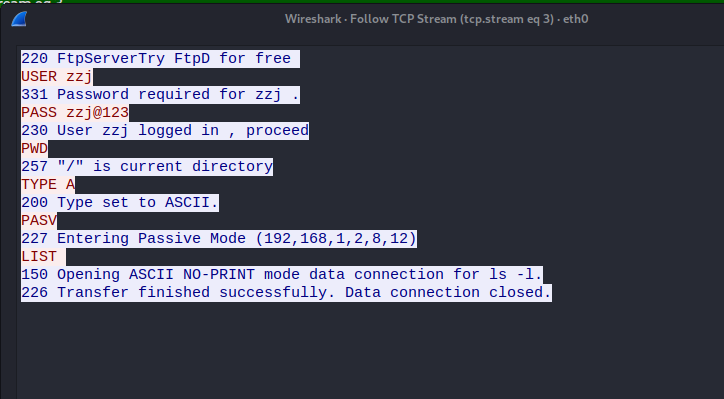
首先搭建好网络拓扑,包含客户端、服务端、一台交换机 以及 云。 客户端client1和服务端server1各自配置好IP地址,服务端充当FTP服务器,启动ftp服务 其中要先配置cloud1相关配置,然后才可以进行连线, 第一步进行端口…...

golang 字符编码 gbk/gb2312 utf8编码相互转换,判断字符是否gbk编码函数, 字符编码转换基础原理解析, golang默认编码utf8
虽然golang里面的默认编码都是统一的unicode utf8编码, 但是我们在调用外部系统提供的api时,就可能会遇到别人的接口提供的编码非 utf8编码,而是gbk/gb2312编码, 这时候我们就必须要将别人的gbk编码转换为go语言里面的默认编码ut…...
上安装EMQX)
CentOS(7.x、8)上安装EMQX
EMQX 是一个高度可扩展的分布式 MQTT 消息服务器,适用于 IoT、M2M 和移动应用程序。以下是在 CentOS 系统上安装 EMQX 的基本步骤: 在 CentOS 上安装 EMQ X 步骤 1: 添加 EMQ X YUM 源 首先,你需要添加 EMQ X 的官方 YUM 源到你的 CentOS 系…...

Mojo模型魔法:动态定制特征转换的艺术
标题:Mojo模型魔法:动态定制特征转换的艺术 在机器学习领域,模型的灵活性和可扩展性是至关重要的。Mojo模型(Model-as-a-Service)提供了一种将机器学习模型部署为服务的方式,允许开发者和数据科学家轻松地…...

多任务高斯过程数学原理和Pytorch实现示例
高斯过程其在回归任务中的应用我们都很熟悉了,但是我们一般介绍的都是针对单个任务的,也就是单个输出。本文我们将讨论扩展到多任务gp,强调它们的好处和实际实现。 本文将介绍如何通过共区域化的内在模型(ICM)和共区域化的线性模型(LMC)&…...

【PPT把当前页输出为图片】及【PPT导出图片模糊】的解决方法(sci论文图片清晰度)
【PPT把当前页输出为图片】及【PPT导出图片模糊】的解决方法 内容一:ppt把当前页输出为图片:内容二:ppt导出图片模糊的解决方法:方法:步骤1:打开注册表编辑器步骤2:修改注册表: 该文…...
TeraTerm 使用技巧
参考资料 自分がよく使うTeratermマクロによる自動ログインのやり方をまとめてみたよTera Term マクロでログインを自動化してみたTera Term のススメ 目录 简介一. 常用基础设置1.1 语言变更1.2 log设置 二. 小技巧2.1 指定host别名2.2 新开窗口2.3 设置粘贴多行命令时的行间…...

意得润色打折啦
新注册使用可以减15%,ABSJU202,直接使用哦ㅤ 此外,如果老板经费充足,预算高,完全可以试试他家的投稿套餐,科学深度编辑,从期刊选择,到投稿协助,投稿信都帮你写好…...

应用升级/灾备测试时使用guarantee 闪回点迅速回退
1.场景 应用要升级,当升级失败时,数据库回退到升级前. 要测试系统,测试完成后,数据库要回退到测试前。 相对于RMAN恢复需要很长时间, 数据库闪回只需要几分钟。 2.技术实现 数据库设置 2个db_recovery参数 创建guarantee闪回点,不需要开启数据库闪回。…...
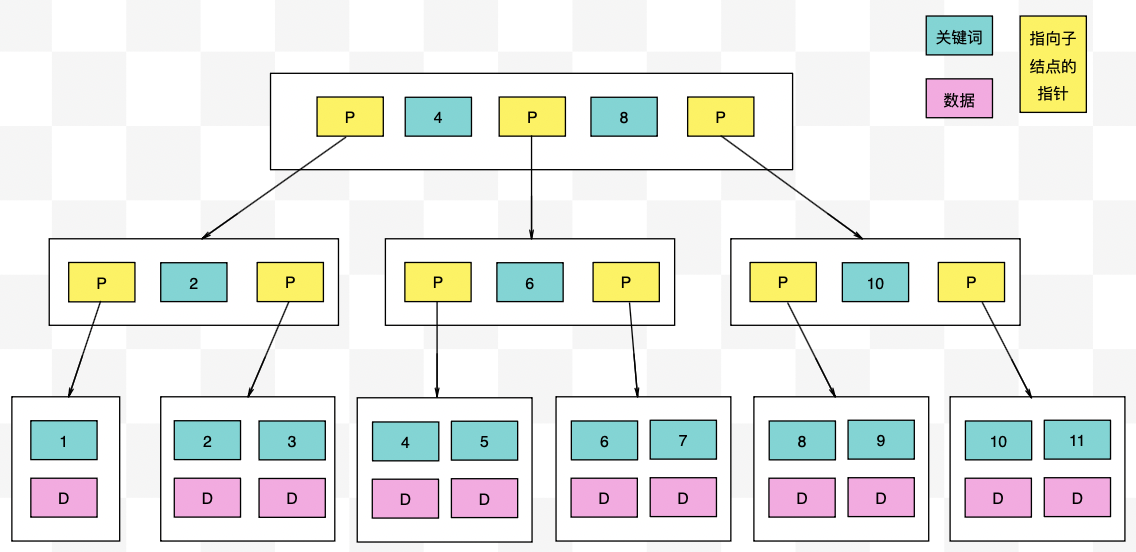
【力扣数据库知识手册笔记】索引
索引 索引的优缺点 优点1. 通过创建唯一性索引,可以保证数据库表中每一行数据的唯一性。2. 可以加快数据的检索速度(创建索引的主要原因)。3. 可以加速表和表之间的连接,实现数据的参考完整性。4. 可以在查询过程中,…...

在HarmonyOS ArkTS ArkUI-X 5.0及以上版本中,手势开发全攻略:
在 HarmonyOS 应用开发中,手势交互是连接用户与设备的核心纽带。ArkTS 框架提供了丰富的手势处理能力,既支持点击、长按、拖拽等基础单一手势的精细控制,也能通过多种绑定策略解决父子组件的手势竞争问题。本文将结合官方开发文档,…...

java调用dll出现unsatisfiedLinkError以及JNA和JNI的区别
UnsatisfiedLinkError 在对接硬件设备中,我们会遇到使用 java 调用 dll文件 的情况,此时大概率出现UnsatisfiedLinkError链接错误,原因可能有如下几种 类名错误包名错误方法名参数错误使用 JNI 协议调用,结果 dll 未实现 JNI 协…...
EtherNet/IP转DeviceNet协议网关详解
一,设备主要功能 疆鸿智能JH-DVN-EIP本产品是自主研发的一款EtherNet/IP从站功能的通讯网关。该产品主要功能是连接DeviceNet总线和EtherNet/IP网络,本网关连接到EtherNet/IP总线中做为从站使用,连接到DeviceNet总线中做为从站使用。 在自动…...
SpringCloudGateway 自定义局部过滤器
场景: 将所有请求转化为同一路径请求(方便穿网配置)在请求头内标识原来路径,然后在将请求分发给不同服务 AllToOneGatewayFilterFactory import lombok.Getter; import lombok.Setter; import lombok.extern.slf4j.Slf4j; impor…...
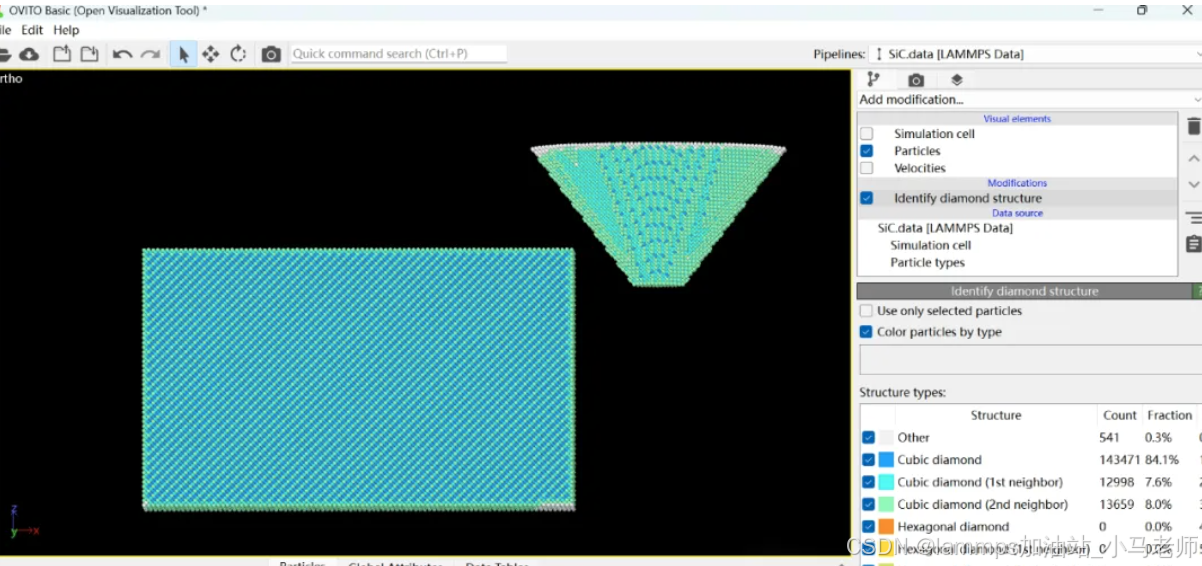
Python Ovito统计金刚石结构数量
大家好,我是小马老师。 本文介绍python ovito方法统计金刚石结构的方法。 Ovito Identify diamond structure命令可以识别和统计金刚石结构,但是无法直接输出结构的变化情况。 本文使用python调用ovito包的方法,可以持续统计各步的金刚石结构,具体代码如下: from ovito…...
Razor编程中@Html的方法使用大全
文章目录 1. 基础HTML辅助方法1.1 Html.ActionLink()1.2 Html.RouteLink()1.3 Html.Display() / Html.DisplayFor()1.4 Html.Editor() / Html.EditorFor()1.5 Html.Label() / Html.LabelFor()1.6 Html.TextBox() / Html.TextBoxFor() 2. 表单相关辅助方法2.1 Html.BeginForm() …...

tomcat指定使用的jdk版本
说明 有时候需要对tomcat配置指定的jdk版本号,此时,我们可以通过以下方式进行配置 设置方式 找到tomcat的bin目录中的setclasspath.bat。如果是linux系统则是setclasspath.sh set JAVA_HOMEC:\Program Files\Java\jdk8 set JRE_HOMEC:\Program Files…...
sshd代码修改banner
sshd服务连接之后会收到字符串: SSH-2.0-OpenSSH_9.5 容易被hacker识别此服务为sshd服务。 是否可以通过修改此banner达到让人无法识别此服务的目的呢? 不能。因为这是写的SSH的协议中的。 也就是协议规定了banner必须这么写。 SSH- 开头,…...