Fast Planner规划算法(一)—— Fast Planner前端
本系列文章用于回顾学习记录Fast-Planner规划算法的相关内容,【本系列博客写于2023年9月,共包含四篇文章,现在进行补发第一篇,其余几篇文章将在近期补发】
一、Fast Planner前端
Fast Planner的轨迹规划部分一共分为三个模块,前端采用Hybrid A* 算法生成比较粗糙的路径\轨迹,然后采用后端对前端生成的路径进行更加细致的处理和优化。

本部分内容对前端进行介绍,Hybrid A* 算法的原理在前面的文章中已经介绍过了,这里主要介绍在Fast Planner中具体使用的一些流程和细节。


Fast Planner中 Hybrid A* 算法的主要流程如下:
在每轮循环中,首先会从优先队列中拿出新的节点 n c n_c nc,并判断该节点是否为终点以及从该节点能不能直接生成到终点的路径(比如采用Reeds sheep算法),若是,则规划结束返回路径,若不是则继续进行本轮循环
在该新节点 n c n_c nc处向外拓展生成一些小的轨迹,这些小轨迹称为primitive,它们的末端就是拓展出来的节点,然后进行剪枝操作,如果有多个节点落在同一个栅格中,仅保留一个,讲这些新拓展出来的节点存放在nodes中。
然后对nodes中的每个节点的质量进行评估(伪代码8-16行),对于每个节点,首先检查其是否已经在已经拓展过的闭集合中以及是否是可行节点(在边界范围内、不与障碍物碰撞等),
若在闭集合或不是可行节点,则结束对这个节点的评估,继续进行下一个节点的评估。若不在闭集合中且为可行节点,则继续进行该节点的评估,计算该节点的g值,即其父节点 n c n_c nc的g值加上该节点对应的小轨迹的代价值。然后判断该节点是否在待拓展的开集合中,若不在,则将其加入到开集合中,记录该节点的g值以及父节点,并计算该节点的f值,该节点的评估结束,若已经在开集合中了,则判断该节点上面算出的新g值是否大于原有的g值,若是则不需要进行处理(该节点原有的方案更优),继续评估下一个节点,若不是,则说明该节点的现有方案更优,将该节点的父节点更新为 n c n_c nc,g值更新为新的g值,并更新计算该节点的总代价f值。本节点评估结束,继续评估下一个节点。

下面来详细看一下上面流程中的一些具体细节:
【注:Hybrid A * 算法每个具体执行过程的实现都有很多种方法,在前面的文章中,我们给出了 zhm_real/MotionPlanning运动规划库中的实现方法及细节,这里给出Fast Planner中的具体实现细节】
(1)、如何由节点 n c n_c nc拓展生成小轨迹primitive——对应Expend函数
将x,y、z轴的轨迹用三个独立的多项式来表示,比如用二次多项式 p x ( t ) = a 0 + a 1 t + a 2 t 2 p_x(t)=a_0+a_1t+a_2t^2 px(t)=a0+a1t+a2t2,自变量是时间t,则状态量和控制输入量可表示成以下的形式
x ( t ) : = [ p ( t ) T , p ˙ ( t ) T , . . . , p ( n − 1 ) ( t ) T ] T ⊂ R 3 n u ( t ) : = p ( n ) ( t ) ∈ U : = [ − u m a x , u m a x ] 3 ⊂ R 3 \begin{aligned}&\mathbf{x}(t):=\boxed{\left[\mathbf{p}(t)^{\mathrm{T}}, \mathbf{\dot p}(t)^{\mathrm{T}},...,\mathbf{p}^{(n-1)}(t)^{\mathrm{T}}\right]^{\mathrm{T}}}\subset\mathbb{R}^{3n}\\&\mathbf{u}(t):=\mathbf{p}^{(n)}(t)\in\mathcal{U}:=[-u_{max},u_{max}]^3\subset\mathbb{R}^3\end{aligned} x(t):=[p(t)T,p˙(t)T,...,p(n−1)(t)T]T⊂R3nu(t):=p(n)(t)∈U:=[−umax,umax]3⊂R3
然后,我们就可以写出状态空间方程,
x ˙ = A x + B u A = [ 0 I 3 0 ⋯ 0 0 0 I 3 ⋯ 0 ⋮ ⋮ ⋮ ⋱ ⋮ 0 ⋯ ⋯ 0 I 3 0 ⋯ ⋯ 0 0 ] , B = [ 0 0 ⋮ 0 I 3 ] \begin{gathered}\dot{\mathbf{x}}=\mathbf{A}\mathbf{x}+\mathbf{B}\mathbf{u}\\\mathbf{A}=\begin{bmatrix}0&\mathbf{I}_3&\mathbf{0}&\cdots&\mathbf{0}\\\mathbf{0}&\mathbf{0}&\mathbf{I}_3&\cdots&\mathbf{0}\\\varvdots&\varvdots&\varvdots&\ddots&\varvdots\\\mathbf{0}&\cdots&\cdots&\mathbf{0}&\mathbf{I}_3\\\mathbf{0}&\cdots&\cdots&\mathbf{0}&\mathbf{0}\end{bmatrix},\mathbf{B}=\begin{bmatrix}\mathbf{0}\\\mathbf{0}\\\varvdots\\\mathbf{0}\\\mathbf{I}_3\end{bmatrix}\end{gathered} x˙=Ax+BuA= 00⋮00I30⋮⋯⋯0I3⋮⋯⋯⋯⋯⋱0000⋮I30 ,B= 00⋮0I3
这样,我们给定一个初始状态和一段时间内的控制输入里以后,就可以利用下式计算整条小轨迹上任意时刻的状态
x ( t ) = e A t x ( 0 ) + ∫ 0 t e A ( t − τ ) B u ( τ ) d τ initial state control input \begin{aligned}\mathbf{x}(t)=e^{\mathbf{A}t}&\color{red}{\boxed{\mathbf{x}(0)}}+\color{black}\int_0^te^{\mathbf{A}(t-\tau)}\mathbf{B}&\color{red}{\boxed{\mathbf{u}(\tau)}}\color{black} d\tau\\&\color{red}{\text{initial state}}&\color{red}{\text{control input}}\end{aligned} x(t)=eAtx(0)+∫0teA(t−τ)Binitial stateu(τ)dτcontrol input

实际使用时,会对控制量在上下界范围内进行平均的离散采样,得到多组控制输入量,从而得到多条小轨迹

在Fast-Planner中,n取值为2,即状态选取为位置和速度,输入为加速度

(2)、如何计算每段小轨迹的代价值——对应EdgeCost函数
对于一条小轨迹,在Fast-Planner中我们比较在意的是这条轨迹的执行时间和控制量,所以定义如下的代价函数(不同的需求和实际应用场景,可以选择不同的代价函数)
T ( T ) = ∫ 0 T ∥ u ( t ) ∥ 2 d t + ρ T T(T)=\int_{0}^{T}\|\mathbf{u}(t)\|^{2}dt+\rho T T(T)=∫0T∥u(t)∥2dt+ρT
其中 T T T表示这一段小轨迹的时间, u u u是控制量, ρ \rho ρ表示对时间惩罚项的权重参数,对于一条小轨迹而言,在0~T时间内它的控制输入是固定的常量,每条小轨迹的总时间T也是固定的, 所以,我们并不需要计算上面的积分,它等效于使用下式来计算小轨迹的代价值, τ \tau τ即为小轨迹的持续时间
e c = ( ∥ u d ∥ 2 + ρ ) τ e_{c}=(\|\mathbf{u}_{d}\|^{2}+\rho)\tau ec=(∥ud∥2+ρ)τ
然后,我们把从起点开始的到当前节点的所有小轨迹的代价加起来,就得到了,从起点到当前节点的代价值,也就是该节点的g值,如下所示:
g c = ∑ j = 1 J ( ∥ ( u d ) j ∥ 2 + ρ ) τ g_c=\sum_{j=1}^J\left(\left\|(\mathbf{u}_d)_j\right\|^2+\rho\right)\tau gc=j=1∑J(∥(ud)j∥2+ρ)τ

(3)、如何评估一个节点的启发代价值——对应Heuristic函数
基于庞特里亚金最小原理设计了一条三阶的多项式轨迹,从当前状态出发,终止于目标点,轨迹的总时长已知,给定当前点和目标点的位置和速度,如下所示:
p ( t ) = a 3 t 3 + a 2 t 2 + a 1 t + a 0 p ( 0 ) = p μ c , p ( 0 ˙ ) = v μ c p ( T ) = p μ g , p ( T ˙ ) = v μ g \begin{aligned}p(t)&=a_3t^3+a_2t^2+a_1t+a_0\\p(0)&=p_{\mu c},\quad p(\dot{0})=v_{\mu c}\\p(T)&=p_{\mu g},\quad p(\dot{T})=v_{\mu g}\end{aligned} p(t)p(0)p(T)=a3t3+a2t2+a1t+a0=pμc,p(0˙)=vμc=pμg,p(T˙)=vμg
因此,可以得到该多项式系数满足下式:
[ 0 0 0 1 0 0 1 0 T 3 T 2 T 1 3 T 2 2 T 1 0 ] [ a 3 a 2 a 1 a 0 ] = [ p μ c v μ c p μ g v μ g ] \begin{bmatrix}0&0&0&1\\0&0&1&0\\T^3&T^2&T&1\\3T^2&2T&1&0\end{bmatrix}\begin{bmatrix}a_3\\a_2\\a_1\\a_0\end{bmatrix}=\begin{bmatrix}p_{\mu c}\\v_{\mu c}\\p_{\mu g}\\v_{\mu g}\end{bmatrix} 00T33T200T22T01T11010 a3a2a1a0 = pμcvμcpμgvμg
然后,基于庞特里亚金最小原理,得到最优的轨迹表达式如下:
p μ ∗ ( t ) = 1 6 α μ t 3 + 1 2 β μ t 2 + v μ c t + p μ c [ α μ β μ ] = 1 T 3 [ − 12 6 T 6 T − 2 T 2 ] [ p μ g − p μ c − v μ c T v μ g − v μ c ] \begin{aligned}p_\mu^*(t)&=\frac{1}{6}\alpha_\mu t^3+\frac{1}{2}\beta_\mu t^2+v_{\mu c}t+p_{\mu c}\\\\\begin{bmatrix}\alpha_\mu\\\beta_\mu\end{bmatrix}&=\frac{1}{T^3}\begin{bmatrix}-12&6T\\6T&-2T^2\end{bmatrix}\begin{bmatrix}p_{\mu g}-p_{\mu c}-v_{\mu c}T\\v_{\mu g}-v_{\mu c}\end{bmatrix}\end{aligned} pμ∗(t)[αμβμ]=61αμt3+21βμt2+vμct+pμc=T31[−126T6T−2T2][pμg−pμc−vμcTvμg−vμc]
得到上面的位置轨迹后,求两阶导数可以得到加速度轨迹,在取位置和速度为状态量时,加速度也即控制输入:
a μ ∗ ( t ) = α μ t + β μ u ( t ) : = [ a x ( t ) , a y ( t ) , a z ( t ) ] T \begin{aligned}&a_\mu^*(t)=\alpha_\mu t+\beta_\mu\\\\&\mathbf{u}(t):=[a_x(t),a_y(t),a_z(t)]^\mathrm{T}\end{aligned} aμ∗(t)=αμt+βμu(t):=[ax(t),ay(t),az(t)]T
得到了这样一条轨迹后,就可以利用上面介绍的求小轨迹的代价的方式,求出这条轨迹的代价,作为考虑运动学但不考虑障碍物的启发式代价函数。
T ∗ ( T ) = ∫ 0 l ∥ u ( t ) ∥ 2 d t + ρ T = ∑ μ ∈ { x , y , z } ( 1 3 α μ 2 T 3 + 1 2 α μ β μ T 2 + β μ 2 T ) + ρ T \begin{aligned} \mathcal{T}^{*}(T)& =\int_{0}^{l}\|\mathbf{u}(t)\|^{2}dt+\rho T \\ &=\sum_{\mu\in\{x,y,z\}}\left(\frac{1}{3}{\alpha_{\mu}}^{2}T^{3}+\frac{1}{2}\alpha_{\mu}\beta_{\mu}T^{2}+{\beta_{\mu}}^{2}T\right)+\rho T \end{aligned} T∗(T)=∫0l∥u(t)∥2dt+ρT=μ∈{x,y,z}∑(31αμ2T3+21αμβμT2+βμ2T)+ρT
上面,我们假设时间T是人为给定的、已知的,但是很明显,我们并不清楚,从当前点到目标点合适的T应该如何选择。所以,我们可以将上式对T进行求导等于0,即 ∂ T ∗ ( T ) ∂ T = 0 \frac{\partial\mathcal{T}^*(T)}{\partial T}=0 ∂T∂T∗(T)=0,来求取最合适的 T h T_h Th,进而得到代价值

参考资料:
1、[深蓝学院—移动机器人运动规划]
链接放不了了,感兴趣的小伙伴自行查找吧

相关文章:
Fast Planner规划算法(一)—— Fast Planner前端
本系列文章用于回顾学习记录Fast-Planner规划算法的相关内容,【本系列博客写于2023年9月,共包含四篇文章,现在进行补发第一篇,其余几篇文章将在近期补发】 一、Fast Planner前端 Fast Planner的轨迹规划部分一共分为三个模块&…...

问题记录-SpringBoot 2.7.2 整合 Swagger 报错
详细报错如下 报错背景,我将springboot从2.3.3升级到了2.7.2,报了下面的错误: org.springframework.context.ApplicationContextException: Failed to start bean documentationPluginsBootstrapper; nested exception is java.lang.NullPo…...

【视觉SLAM】 十四讲ch5习题
1.*寻找一个相机(你手机或笔记本的摄像头即可),标定它的内参。你可能会用到标定板,或者自己打印一张标定用的棋盘格。 参考我之前写过的这篇博客:【OpenCV】 相机标定 calibrateCamera Code来源是《学习OpenCV3》18.…...

Webpack基础学习-Day01
Webpack基础学习-Day01 1.1 webpack 是什么 webpack 是一种前端资源构建工具,一个静态模块打包器(module bundler)。 在 webpack 看来, 前端的所有资源文件(js/json/css/img/less/…)都会作为模块处理。 它将根据模块的依赖关系进行静态分析,打包生成…...

如何防止热插拔烧坏单片机
大家都知道一般USB接口属于热插拔,实际任意带电进行连接的操作都可以属于热插拔。我们前面讲过芯片烧坏的原理,那么热插拔就是导致芯片烧坏的一个主要原因之一。 在电子产品的整个装配过程、以及产品使用过程经常会面临接口热插拔或者类似热插拔的过程。…...

JQuery+HTML+JavaScript:实现地图位置选取和地址模糊查询
本文详细讲解了如何使用 JQueryHTMLJavaScript 实现移动端页面中的地图位置选取功能。本文逐步展示了如何构建基本的地图页面,如何通过点击地图获取经纬度和地理信息,以及如何实现模糊查询地址并在地图上标注。最后,提供了完整的代码示例&…...
几何 13 多部件)
ArcGIS Pro SDK (九)几何 13 多部件
ArcGIS Pro SDK (九)几何 13 多部件 文章目录 ArcGIS Pro SDK (九)几何 13 多部件1 获取多部分要素的各个部分2 获取多边形的最外层环 环境:Visual Studio 2022 .NET6 ArcGIS Pro SDK 3.0 1 获取多部分要素的各个部分…...

【Node】npm i --legacy-peer-deps,解决依赖冲突问题
文章目录 🍖 前言🎶 一、问题描述✨二、代码展示🏀三、运行结果🏆四、知识点提示 🍖 前言 npm i --legacy-peer-deps,解决依赖冲突问题 🎶 一、问题描述 node执行安装指令时出现报错ÿ…...

h5点击电话号跳转手机拨号
需要使用到h5的 <a>标签 我们首先在<head>标签中添加代码 <meta name"format-detection" content"telephoneyes"/>然后再想要的位置添加代码 <a href"tel:10086"> 点击拨打:10086 </a> 这样功能就实现…...

从数据湖到湖仓一体:统一数据架构演进之路
文章目录 一、前言二、什么是湖仓一体?起源概述 三、为什么要构建湖仓一体?1. 成本角度2. 技术角度 四、湖仓一体实践过程阶段一:摸索阶段(仓、湖并行建设)阶段二:发展阶段方式一、湖上建仓(湖在下、仓在上)方式二:仓外…...
Electron 渲染进程直接调用主进程的API库@electron/remote引用讲解
背景 remote是个老库,早期Electron版本中有个remote对象,这个对象可以横跨所有进程,随意通信,后来官方认为不安全,被干掉了,之后有人利用Electron的IPC通信,底层通过Promise的await能力&#x…...

在python中使用正则表达式
正则表达式是什么?就是要寻找的数据的规律,使用正则表达式的步骤有三 第一,寻找规律,第二使用正则符号表示规律,第三,提取信息 看下面的代码 import re wenzhang (小草偷偷地从土里钻出来,嫩…...

华清数据结构day4 24-7-19
链表的相关操作 linklist.h #ifndef LINKLIST_H #define LINKLIST_H #include <myhead.h> typedef int datatype; typedef struct Node {union{int len;datatype data;};struct Node *next; } Node, *NodePtr;NodePtr list_create(); NodePtr apply_node(datatype e); …...

【深度学习图像】拼接图的切分
用户常常将多张图拼成一张图。 如果将这张图拆为多个子图,下面是一种opencv的办法,后面要训练一个模型来识别边缘更为准确。 import osimport cv2 import numpy as npdef detect_lines(image_path):# 读取图片image cv2.imread(image_path)if image i…...

Covalent(CXT)运营商网络规模扩大 42%,以满足激增的需求
Covalent Network(CXT)是领先的人工智能模块化数据基础设施,网络集成了超过 230 条链并积累了数千名客户,目前 Covalent Network(CXT)网络迎来了五位新运营商的加入,包括 Graphyte Labs、PierTw…...

Java 集合框架:HashMap 的介绍、使用、原理与源码解析
大家好,我是栗筝i,这篇文章是我的 “栗筝i 的 Java 技术栈” 专栏的第 020 篇文章,在 “栗筝i 的 Java 技术栈” 这个专栏中我会持续为大家更新 Java 技术相关全套技术栈内容。专栏的主要目标是已经有一定 Java 开发经验,并希望进…...

单周期CPU(三)译码模块(minisys)(verilog)(vivado)
timescale 1ns / 1ps //module Idecode32 (input reset,input clock,output [31:0] read_data_1, // 输出的第一操作数output [31:0] read_data_2, // 输出的第二操作数input [31:0] Instruction, // 取指单元来的指令input [31:0] …...

理想化相机模型的相机内参
文章目录 理想化相机模型的相机内参计算1. 相机内参定义2. 根据视角和图像分辨率计算相机内参2.1 计算焦距 fx 和 fy2.2 计算主点 cx 和 cy3. 示例计算3.1 计算 fx3.2 假设 fy = fx(因为没有垂直视场角的信息)3.3 计算主点4. 相机内参矩阵理想化相机模型的相机内参计算 在理…...

【数据脱敏】⭐️SpringBoot 整合 Jackson 实现隐私数据加密
目录 🍸前言 🍻一、Jackson 序列化库 🍺二、方案实践 2.1 环境准备 2.2 依赖引入 2.3 代码编写 💞️三、接口测试 🍹四、章末 🍸前言 小伙伴们大家好,最近也是很忙啊,上次的文章…...

骑砍2霸主MOD开发(18)-多人联机模式开发环境搭建
一.多人联机模式网络拓扑图 二.专用服务器搭建(DedicatedServer) <1.Token生成(用于LobbyServer的校验): 进入多人联机大厅,ALT~打开RGL控制台,输入customserver.gettoken Token文件路径:C:\Users\taohu\Documents\Mount and Blade II Bannerlord\Tokens <2.启动专用服务…...

IDEA运行Tomcat出现乱码问题解决汇总
最近正值期末周,有很多同学在写期末Java web作业时,运行tomcat出现乱码问题,经过多次解决与研究,我做了如下整理: 原因: IDEA本身编码与tomcat的编码与Windows编码不同导致,Windows 系统控制台…...
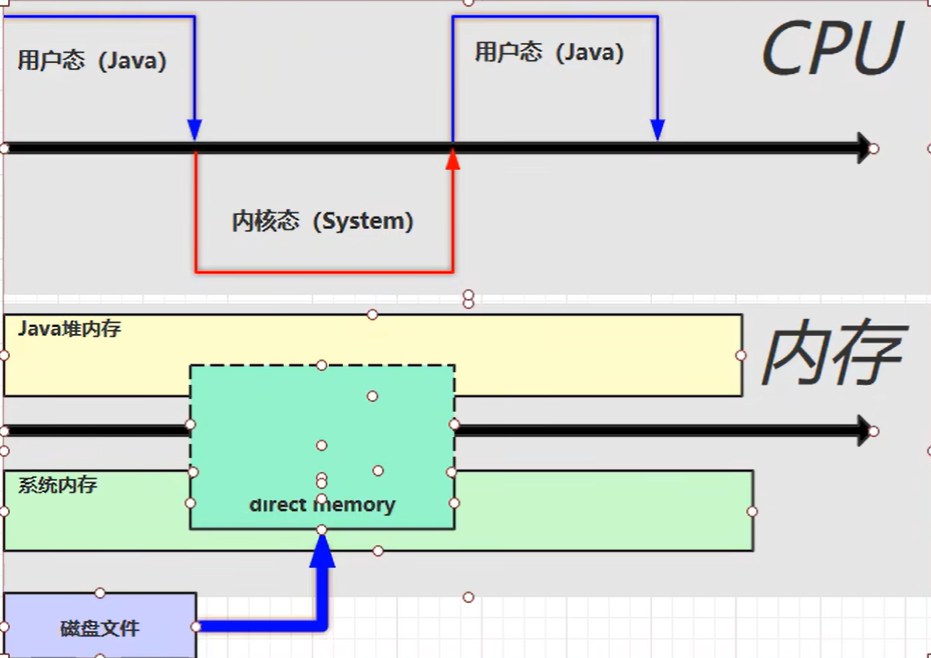
【JVM】- 内存结构
引言 JVM:Java Virtual Machine 定义:Java虚拟机,Java二进制字节码的运行环境好处: 一次编写,到处运行自动内存管理,垃圾回收的功能数组下标越界检查(会抛异常,不会覆盖到其他代码…...

【Go】3、Go语言进阶与依赖管理
前言 本系列文章参考自稀土掘金上的 【字节内部课】公开课,做自我学习总结整理。 Go语言并发编程 Go语言原生支持并发编程,它的核心机制是 Goroutine 协程、Channel 通道,并基于CSP(Communicating Sequential Processes࿰…...

04-初识css
一、css样式引入 1.1.内部样式 <div style"width: 100px;"></div>1.2.外部样式 1.2.1.外部样式1 <style>.aa {width: 100px;} </style> <div class"aa"></div>1.2.2.外部样式2 <!-- rel内表面引入的是style样…...

HTML前端开发:JavaScript 常用事件详解
作为前端开发的核心,JavaScript 事件是用户与网页交互的基础。以下是常见事件的详细说明和用法示例: 1. onclick - 点击事件 当元素被单击时触发(左键点击) button.onclick function() {alert("按钮被点击了!&…...

大学生职业发展与就业创业指导教学评价
这里是引用 作为软工2203/2204班的学生,我们非常感谢您在《大学生职业发展与就业创业指导》课程中的悉心教导。这门课程对我们即将面临实习和就业的工科学生来说至关重要,而您认真负责的教学态度,让课程的每一部分都充满了实用价值。 尤其让我…...

【无标题】路径问题的革命性重构:基于二维拓扑收缩色动力学模型的零点隧穿理论
路径问题的革命性重构:基于二维拓扑收缩色动力学模型的零点隧穿理论 一、传统路径模型的根本缺陷 在经典正方形路径问题中(图1): mermaid graph LR A((A)) --- B((B)) B --- C((C)) C --- D((D)) D --- A A -.- C[无直接路径] B -…...

Modbus RTU与Modbus TCP详解指南
目录 1. Modbus协议基础 1.1 什么是Modbus? 1.2 Modbus协议历史 1.3 Modbus协议族 1.4 Modbus通信模型 🎭 主从架构 🔄 请求响应模式 2. Modbus RTU详解 2.1 RTU是什么? 2.2 RTU物理层 🔌 连接方式 ⚡ 通信参数 2.3 RTU数据帧格式 📦 帧结构详解 🔍…...

es6+和css3新增的特性有哪些
一:ECMAScript 新特性(ES6) ES6 (2015) - 革命性更新 1,记住的方法,从一个方法里面用到了哪些技术 1,let /const块级作用域声明2,**默认参数**:函数参数可以设置默认值。3&#x…...
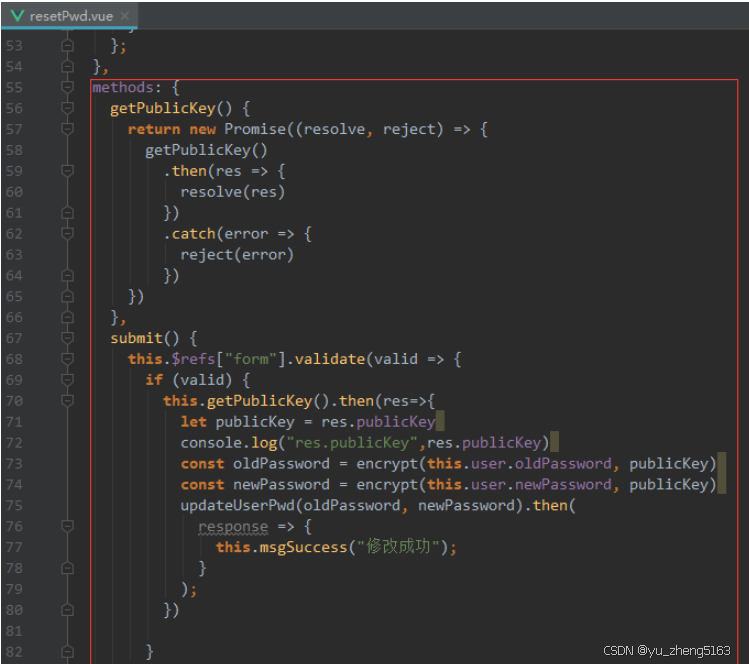
若依登录用户名和密码加密
/*** 获取公钥:前端用来密码加密* return*/GetMapping("/getPublicKey")public RSAUtil.RSAKeyPair getPublicKey() {return RSAUtil.rsaKeyPair();}新建RSAUti.Java package com.ruoyi.common.utils;import org.apache.commons.codec.binary.Base64; im…...