Python+Yolov5道路障碍物识别
Python+Yolov5道路障碍物识别
如需安装运行环境或远程调试,见文章底部个人QQ名片,由专业技术人员远程协助!
前言
这篇博客针对<<Python+Yolov5道路障碍物识别>>编写代码,代码整洁,规则,易读。 学习与应用推荐首选。
文章目录
一、所需工具软件
二、使用步骤
1. 引入库
2. 识别图像特征
3. 参数设置
4. 运行结果
三、在线协助
一、所需工具软件
1. Pycharm, Python
2. Qt, OpenCV
二、使用步骤
1.引入库
代码如下(示例):
import cv2
import torch
from numpy import randomfrom models.experimental import attempt_load
from utils.datasets import LoadStreams, LoadImages
from utils.general import check_img_size, check_requirements, check_imshow, non_max_suppression, apply_classifier, \scale_coords, xyxy2xywh, strip_optimizer, set_logging, increment_path
from utils.plots import plot_one_box
from utils.torch_utils import select_device, load_classifier, time_synchronized
2.识别图像特征
代码如下(示例):
defdetect(save_img=False):source, weights, view_img, save_txt, imgsz = opt.source, opt.weights, opt.view_img, opt.save_txt, opt.img_sizewebcam = source.isnumeric() or source.endswith('.txt') or source.lower().startswith(('rtsp://', 'rtmp://', 'http://'))# Directoriessave_dir = Path(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok)) # increment run(save_dir / 'labels'if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir# Initializeset_logging()device = select_device(opt.device)half = device.type != 'cpu'# half precision only supported on CUDA# Load modelmodel = attempt_load(weights, map_location=device) # load FP32 modelstride = int(model.stride.max()) # model strideimgsz = check_img_size(imgsz, s=stride) # check img_sizeif half:model.half() # to FP16# Second-stage classifierclassify = Falseif classify:modelc = load_classifier(name='resnet101', n=2) # initializemodelc.load_state_dict(torch.load('weights/resnet101.pt', map_location=device)['model']).to(device).eval()# Set Dataloadervid_path, vid_writer = None, Noneif webcam:view_img = check_imshow()cudnn.benchmark = True# set True to speed up constant image size inferencedataset = LoadStreams(source, img_size=imgsz, stride=stride)else:save_img = Truedataset = LoadImages(source, img_size=imgsz, stride=stride)# Get names and colorsnames = model.module.names ifhasattr(model, 'module') else model.namescolors = [[random.randint(0, 255) for _ inrange(3)] for _ in names]# Run inferenceif device.type != 'cpu':model(torch.zeros(1, 3, imgsz, imgsz).to(device).type_as(next(model.parameters()))) # run oncet0 = time.time()for path, img, im0s, vid_cap in dataset:img = torch.from_numpy(img).to(device)img = img.half() if half else img.float() # uint8 to fp16/32img /= 255.0# 0 - 255 to 0.0 - 1.0if img.ndimension() == 3:img = img.unsqueeze(0)# Inferencet1 = time_synchronized()pred = model(img, augment=opt.augment)[0]# Apply NMSpred = non_max_suppression(pred, opt.conf_thres, opt.iou_thres, classes=opt.classes, agnostic=opt.agnostic_nms)t2 = time_synchronized()# Apply Classifierif classify:pred = apply_classifier(pred, modelc, img, im0s)# Process detectionsfor i, det inenumerate(pred): # detections per imageif webcam: # batch_size >= 1p, s, im0, frame = path[i], '%g: ' % i, im0s[i].copy(), dataset.countelse:p, s, im0, frame = path, '', im0s, getattr(dataset, 'frame', 0)p = Path(p) # to Pathsave_path = str(save_dir / p.name) # img.jpgtxt_path = str(save_dir / 'labels' / p.stem) + (''if dataset.mode == 'image'elsef'_{frame}') # img.txts += '%gx%g ' % img.shape[2:] # print stringgn = torch.tensor(im0.shape)[[1, 0, 1, 0]] # normalization gain whwhiflen(det):# Rescale boxes from img_size to im0 sizedet[:, :4] = scale_coords(img.shape[2:], det[:, :4], im0.shape).round()# Write resultsfor *xyxy, conf, cls inreversed(det):if save_txt: # Write to filexywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywhline = (cls, *xywh, conf) if opt.save_conf else (cls, *xywh) # label formatwithopen(txt_path + '.txt', 'a') as f:f.write(('%g ' * len(line)).rstrip() % line + '\n')if save_img or view_img: # Add bbox to imagelabel = f'{names[int(cls)]}{conf:.2f}'plot_one_box(xyxy, im0, label=label, color=colors[int(cls)], line_thickness=3)# Print time (inference + NMS)print(f'{s}Done. ({t2 - t1:.3f}s)')# Save results (image with detections)if save_img:if dataset.mode == 'image':cv2.imwrite(save_path, im0)else: # 'video'if vid_path != save_path: # new videovid_path = save_pathifisinstance(vid_writer, cv2.VideoWriter):vid_writer.release() # release previous video writerfourcc = 'mp4v'# output video codecfps = vid_cap.get(cv2.CAP_PROP_FPS)w = int(vid_cap.get(cv2.CAP_PROP_FRAME_WIDTH))h = int(vid_cap.get(cv2.CAP_PROP_FRAME_HEIGHT))vid_writer = cv2.VideoWriter(save_path, cv2.VideoWriter_fourcc(*fourcc), fps, (w, h))vid_writer.write(im0)if save_txt or save_img:s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}"if save_txt else''print(f"Results saved to {save_dir}{s}")print(f'Done. ({time.time() - t0:.3f}s)')print(opt)check_requirements()with torch.no_grad():if opt.update: # update all models (to fix SourceChangeWarning)for opt.weights in ['yolov5s.pt', 'yolov5m.pt', 'yolov5l.pt', 'yolov5x.pt']:detect()strip_optimizer(opt.weights)else:detect()
3.参数定义
代码如下(示例):
if __name__ == '__main__':parser = argparse.ArgumentParser()parser.add_argument('--weights', nargs='+', type=str, default='yolov5_best_road_crack_recog.pt', help='model.pt path(s)')parser.add_argument('--img-size', type=int, default=640, help='inference size (pixels)')parser.add_argument('--conf-thres', type=float, default=0.25, help='object confidence threshold')parser.add_argument('--iou-thres', type=float, default=0.45, help='IOU threshold for NMS')parser.add_argument('--view-img', action='store_true', help='display results')parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')parser.add_argument('--classes', nargs='+', type=int, default='0', help='filter by class: --class 0, or --class 0 2 3')parser.add_argument('--agnostic-nms', action='store_true', help='class-agnostic NMS')parser.add_argument('--augment', action='store_true', help='augmented inference')parser.add_argument('--update', action='store_true', help='update all models')parser.add_argument('--project', default='runs/detect', help='save results to project/name')parser.add_argument('--name', default='exp', help='save results to project/name')parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')opt = parser.parse_args()print(opt)check_requirements()with torch.no_grad():if opt.update: # update all models (to fix SourceChangeWarning)for opt.weights in ['yolov5s.pt', 'yolov5m.pt', 'yolov5l.pt', 'yolov5x.pt']:detect()strip_optimizer(opt.weights)else:detect()
运行结果如下


三、在线协助:
如需安装运行环境或远程调试,见文章底部个人QQ名片,由专业技术人员远程协助!
1)远程安装运行环境,代码调试
2)Qt, C++, Python入门指导
3)界面美化
4)软件制作
博主推荐文章:https://blog.csdn.net/alicema1111/article/details/123851014
博主推荐文章:https://blog.csdn.net/alicema1111/article/details/128420453
个人博客主页:https://blog.csdn.net/alicema1111?type=blog
博主所有文章点这里:https://blog.csdn.net/alicema1111?type=blog
相关文章:
Python+Yolov5道路障碍物识别
PythonYolov5道路障碍物识别如需安装运行环境或远程调试,见文章底部个人QQ名片,由专业技术人员远程协助!前言这篇博客针对<<PythonYolov5道路障碍物识别>>编写代码,代码整洁,规则,易读。 学习与…...
全新升级,EasyV 3D高德地图组件全新上线
当我们打开任意一个可视化搭建工具或者搜索数据可视化等关键词,我们会发现「地图」是可视化领域中非常重要的一种形式,对于许多可视化应用场景都具有非常重要的意义,那对于EasyV,地图又意味着什么呢?EasyV作为数字孪生…...
从管理到变革,优秀管理者的进阶之路
作为一位管理者,了解自身需求、企业需求和用户需求是非常重要的。然而,仅仅满足这些需求是不够的。我们还需要进行系统化的思考,以了解我们可以为他人提供什么价值,以及在企业中扮演什么样的角色。只有清晰的自我定位,…...

安装Anaconda3
安装Anaconda3 下载安装文件 可以去官网下载 https://repo.anaconda.com/archive/根据自己的操作系统选择合适的Anaconda版本 我选择的是Anaconda3-2021.05-Linux-x86_64.sh的版本 方法一:可以下载到本地然后在上传到虚拟机 方法二:在终端输入以下…...
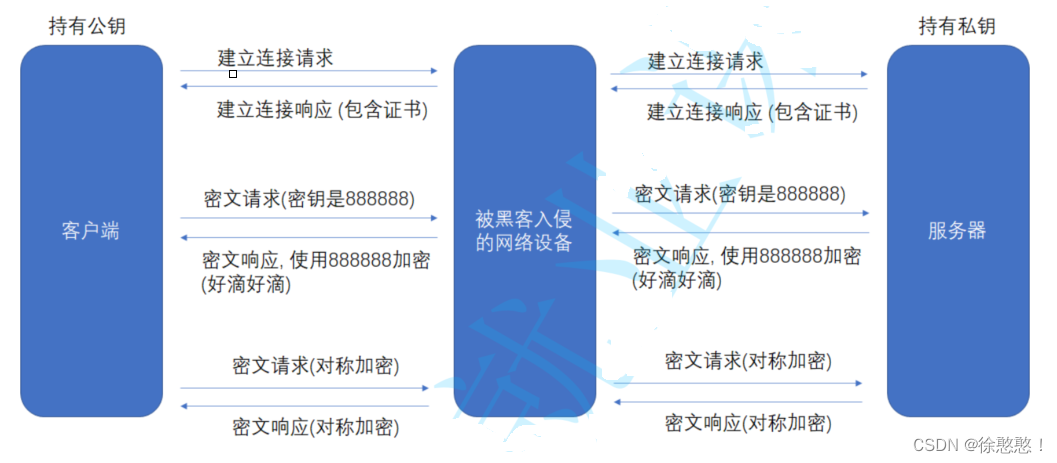
HTTPS,SSL(对称加密和非对称加密详解)
上一篇博客(HTTP详解_徐憨憨!的博客-CSDN博客)详细讲解了关于HTTP的知识,了解到HTTP协议下的数据传输是一种明文传输,既然是明文传输,可能导致在传输过程中出现一些被篡改的情况,此时就需要对所…...

【数据结构】还不懂算法复杂度?一文带你速解
前言:前面我们已经系统的学完C语言的相关知识,现在我们已经较为熟练的掌握了C语言中的各中代码语法和结构使用,能够使用代码来解决一些简单问题。但是对于一个程序员来说,仅仅会语法是远远不够的,从今天开始,我们将进入…...
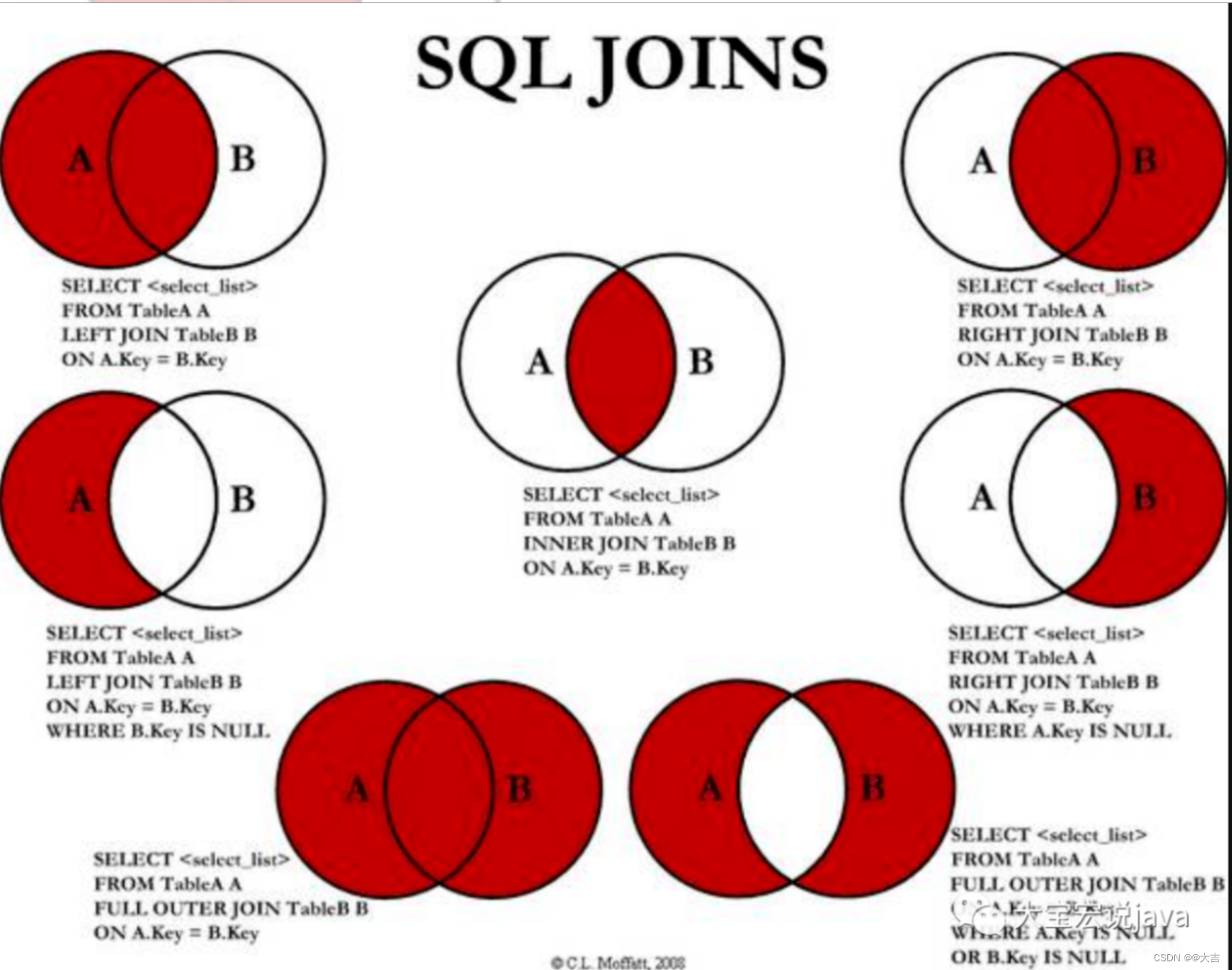
案例描述:update中,MySQL inner join 和 left join的区别,小结果集驱动大结果集
场景描述 以一个场景为例: 单据A:下游子表 (数据量级小) 单据B:下游主表(数据量级小) 单据C:中游子表(数据量级小) 单据D:中游主表(…...

CF1784D Wooden Spoon
CF1784D Wooden Spoon 题目大意 有2n2^n2n个人,进行nnn轮比赛。比赛的图是一棵完全二叉树。编号小的人一定能赢编号大的人,如果一个人满足: 第一次比赛被打败打败这个人的人在第二次比赛中被打败打败上一个人的人在第三次比赛中被打败…\d…...
【数据结构】栈
文章目录😺前言栈初始化栈顶入栈栈顶出栈栈体判空栈的数据个数获取栈顶元素栈的销毁整体代码😼写在最后😺前言 👻前面我们学习了链表,总算是跨过一个台阶了,本章带大家轻松一波,领悟一下栈的魅力…...
C++单继承和多继承
C单继承和多继承继承单继承写法继承中构造函数的写法写法构造和析构的顺序问题多继承继承 1.继承,主要是遗传学中的继承概念 2.继承的写法,继承中的权限问题 3.继承中的构造函数的写法 继承:子类没有新的属性,或者行为的产生 父类…...

金三银四,今年企业招聘如何?
又是一年求职季,互联网人找工作,和找对象一样严谨,不随便放手更不随便牵手。于是挑挑拣拣,最后的结果可能就是把自己挑剩下了。 时间已经悄然滑进3月中旬,多少无处安放的青春,还没尘埃落定?优秀…...

数字信号处理:滤波、频谱
一、滤波算法 应该说数字滤波器可以有效减小50Hz工频的干扰,完全消除是不可能的。以20ms为最小单位的整倍数周期滤波,可以有效减少工频的干扰。 软件中构建 IIR 陷波或者 FIR 带阻 数字滤波器,消除工频干扰对测量结果的影响。 1. 自适应滤波 …...
C#等高级语言运行过程
C#等高级语言运行流程:假设您编写了一个 C# 程序并将其保存在一个称为源代码的文件中。特定于语言的编译器将源代码编译成 MSIL(Microsoft 中间语言),也称为 CIL(通用中间语言)或 IL(中间语言&a…...
如何优雅的用POI导入Excel文件
在企业级项目开发中,要经常涉及excel文件和程序之间导入导出的业务要求,那么今天来讲一讲excel文件导入的实现。java实现对excel的操作有很多种方式,例如EasyExcel等,今天我们使用的是POI技术实现excel文件的导入。POI技术简介1.P…...
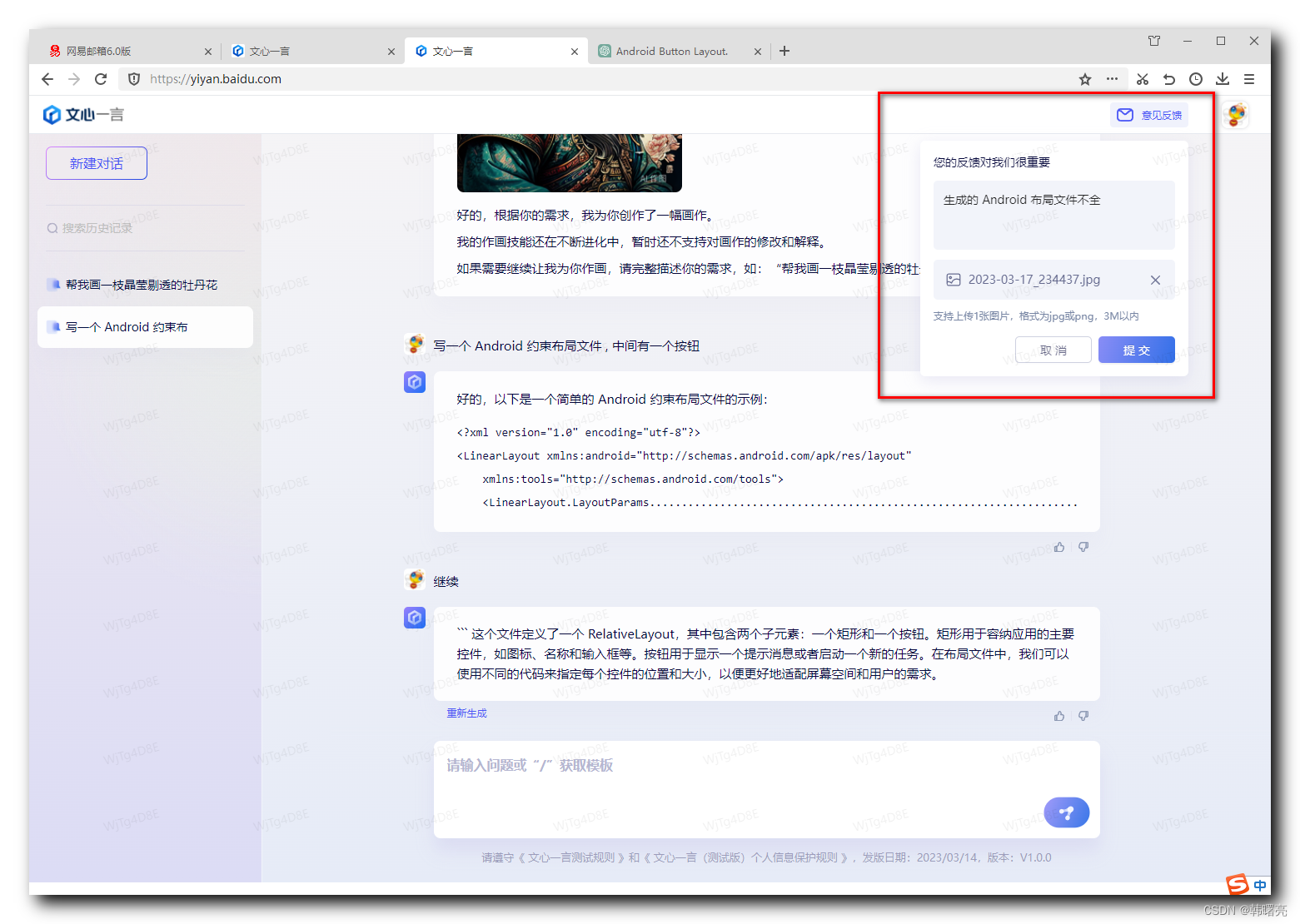
【AI 工具】文心一言内测记录
文章目录一、申请内测二、收到内测邀请三、激活内测四、开始使用1、普通对话2、生成图片3、生成代码4、写剧本5、生成小说五、问题反馈一、申请内测 到 https://yiyan.baidu.com/welcome 页面 , 点击 " 开始体验 " 按钮 , 申请试用 ; 申请时 , 需要填写相关信息 ; 主…...
Github的使用
Github Date: March 8, 2023 Sum: Github的使用 Github 了解开源相关的概念 1. 什么是开源 2. 什么是开源许可协议 开源并不意味着完全没有限制,为了限制使用者的使用范围和保护作者的权利,每个开源项目都应该遵守开源许可协议( Open Sou…...
抽丝剥茧还原真相,记一次神奇的崩溃
作者:靳倡荣 本文详细回放了一个崩溃案例的分析过程。回顾了C多态和类内存布局、pc指针与芯片异常处理、内存屏障的相关知识。 一、不讲“武德”的崩溃 1.1 查看崩溃调用栈 客户反馈了一个崩溃问题,并提供了core dump文件,查看崩溃调用栈如下…...

学习笔记八:docker资源配额
docker容器控制cpudocker容器控制cpu指定docker容器可以使用的cpu份额两个容器A、B的cpu份额分别为1000和500,结果会怎么样?给容器实例分配512权重的cpu使用份额总结CPU core核心控制扩展:服务器架构CPU配额控制参数的混合使用cpuset-cpus和c…...

小米10s格机修复 nv报错案例解析 关于基带分区的一些常识
前面分享过几期关于基带 diag端口与qcn相关的几篇帖子。其中一位粉丝朋友联系我。他的机型因为误格机导致手机进不去系统,反复进入官方rec报错nv损坏。进不去系统。 有兴趣的朋友可以参阅我的几个帖子,只是个人的一些片面理解。 基带相关贴; 安卓玩机…...
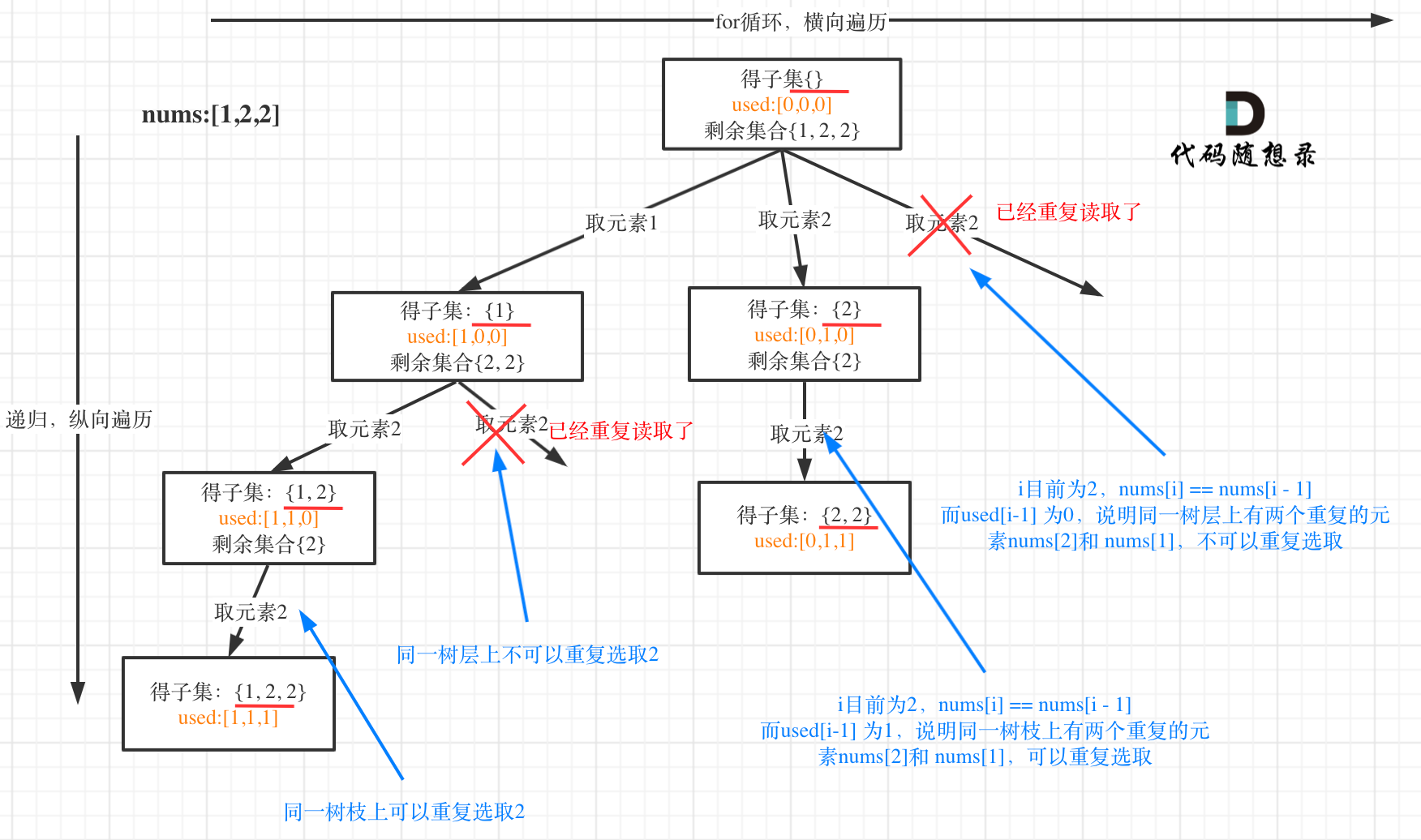
【3.17】MySQL索引整理、回溯(分割、子集问题)
3.1 索引常见面试题 索引的分类 什么是索引? 索引是一种数据结构,可以帮助MySQL快速定位到表中的数据。使用索引,可以大大提高查询的性能。 按「数据结构」分类:Btree索引、Hash索引、Full-text索引。 InnoDB 存储引擎创建的聚簇…...

2.【.NET10 实战--孢子记账--产品智能化】--升级前的准备工作:项目依赖梳理与升级计划制定
我们在日常产品维护时,往往会遇到底层基础框架需要升级的情况,尤其是当底层框架升级到一个新的大版本时,可能会带来一些不兼容的变更,这时候我们就需要做好充分的准备工作,以确保升级过程顺利进行。从本文开始…...

计算机毕业设计springboot中药材仓储管理系统的分析与实现 基于SpringBoot框架的中药饮片智能库存与质量追溯平台 中医药材冷链物流与数字化仓储运营管理系统
计算机毕业设计springboot中药材仓储管理系统的分析与实现0j9h07d8(配套有源码 程序 mysql数据库 论文) 本套源码可以在文本联xi,先看具体系统功能演示视频领取,可分享源码参考。随着中医药的全球化推广和国内市场需求的增长,中药…...

HC-SR04超声波测距传感器工作原理与Arduino驱动实战
HC-SR04超声波测距传感器工作原理与Arduino驱动实战 最近在做一个智能小车的项目,需要让它能感知前方的障碍物,第一时间就想到了HC-SR04这个经典的超声波传感器。它价格便宜、使用简单,是很多创客和嵌入式新手的入门首选。但很多朋友在第一次…...

Ostrakon-VL-8B快速部署指南:10分钟完成GPU环境搭建与模型启动
Ostrakon-VL-8B快速部署指南:10分钟完成GPU环境搭建与模型启动 如果你对多模态大模型感兴趣,想快速体验一下既能看懂图片又能理解文字的模型,那么Ostrakon-VL-8B可能是个不错的起点。它体积相对适中,能力却挺全面,无论…...

Speech Seaco Paraformer批量处理实测:42分钟音频8分钟搞定,太高效了
Speech Seaco Paraformer批量处理实测:42分钟音频8分钟搞定,太高效了 1. 引言:当批量语音转写成为刚需 如果你经常需要处理会议录音、访谈音频或者课程讲座,那你一定对“语音转文字”这件事又爱又恨。爱的是,它能把繁…...

AI绘画神器黑丝空姐-造相Z-Turbo:一键部署,简单操作出大片
AI绘画神器黑丝空姐-造相Z-Turbo:一键部署,简单操作出大片 1. 快速了解黑丝空姐-造相Z-Turbo 黑丝空姐-造相Z-Turbo是一款基于Xinference部署的文生图AI模型服务,专门用于生成高质量的黑丝空姐主题图片。这个镜像已经预装了所有必要的组件和…...

Qwen-Image-Edit超分辨率实战:快速修复模糊人像,效果实测
Qwen-Image-Edit超分辨率实战:快速修复模糊人像,效果实测 1. 引言:模糊照片的救星 你是否遇到过这样的困扰?手机里珍藏的老照片变得模糊不清,或是抓拍的精彩瞬间因为对焦不准而失去了细节。传统修图软件往往难以真正…...

MinerU实战指南:通过API调用,将文档解析集成到自动化工作流
MinerU实战指南:通过API调用,将文档解析集成到自动化工作流 1. 引言:从手动点击到自动流转 想象一下这个场景:每天上班,你需要从几十份PDF报告里提取关键数据,手动复制粘贴到Excel表格,然后生…...

Alibaba DASD-4B Thinking 对话工具 Node.js 环境配置与实时聊天应用开发
Alibaba DASD-4B Thinking 对话工具 Node.js 环境配置与实时聊天应用开发 最近在折腾一些AI对话应用,发现不少开发者对如何快速接入像Alibaba DASD-4B Thinking这样的对话工具很感兴趣。正好,用Node.js来搭建一个实时聊天应用是个挺不错的入门选择。今天…...

输入法词库自由:打破设备边界的跨平台解决方案
输入法词库自由:打破设备边界的跨平台解决方案 【免费下载链接】imewlconverter ”深蓝词库转换“ 一款开源免费的输入法词库转换程序 项目地址: https://gitcode.com/gh_mirrors/im/imewlconverter 你是否曾遇到这样的困境:换了新电脑࿰…...