PCL-基于超体聚类的LCCP点云分割
目录
- 一、LCCP方法
- 二、代码实现
- 三、实验结果
- 四、总结
- 五、相关链接
一、LCCP方法
LCCP指的是Local Convexity-Constrained Patch,即局部凸约束补丁的意思。LCCP方法的基本思想是在图像中找到局部区域内的凸结构,并将这些结构用于分割图像或提取特征。这种方法可以帮助识别图像中的凸物体,并对它们进行分割。LCCP方法通常结合了空间和法线信息,以提高图像分割的准确性和稳定性。
LCCP算法大致可以分成两个部分:1.基于超体聚类的过分割。2.在超体聚类的基础上再聚类。
该方法流程图如下:

二、代码实现
#include <iostream>
#include <pcl/ModelCoefficients.h>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/sample_consensus/method_types.h>
#include <pcl/sample_consensus/model_types.h>
#include <pcl/segmentation/sac_segmentation.h>
#include <pcl/visualization/cloud_viewer.h>
#include <pcl/filters/extract_indices.h>
#include <boost/thread/thread.hpp>
#include <stdlib.h>
#include <cmath>
#include <limits.h>
#include <boost/format.hpp>
#include <pcl/console/parse.h>
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/visualization/point_cloud_color_handlers.h>
#include <pcl/filters/passthrough.h>
#include <pcl/segmentation/supervoxel_clustering.h>
#include <pcl/segmentation/lccp_segmentation.h>
#include <vtkPolyLine.h>
#include <pcl/point_cloud.h>
#include <pcl/segmentation/supervoxel_clustering.h>
#include <pcl/visualization/pcl_visualizer.h>using namespace std;
typedef pcl::PointXYZ PointT;
typedef pcl::LCCPSegmentation<PointT>::SupervoxelAdjacencyList SuperVoxelAdjacencyList;
//邻接线条可视化
void addSupervoxelConnectionsToViewer(pcl::PointXYZRGBA& supervoxel_center, pcl::PointCloud<pcl::PointXYZRGBA>& adjacent_supervoxel_centers,std::string supervoxel_name, pcl::visualization::PCLVisualizer::Ptr& viewer)
{vtkSmartPointer<vtkPoints> points = vtkSmartPointer<vtkPoints>::New();vtkSmartPointer<vtkCellArray> cells = vtkSmartPointer<vtkCellArray>::New();vtkSmartPointer<vtkPolyLine> polyLine = vtkSmartPointer<vtkPolyLine>::New();for (auto adjacent_itr = adjacent_supervoxel_centers.begin(); adjacent_itr != adjacent_supervoxel_centers.end(); ++adjacent_itr){points->InsertNextPoint(supervoxel_center.data);points->InsertNextPoint(adjacent_itr->data);}vtkSmartPointer<vtkPolyData> polyData = vtkSmartPointer<vtkPolyData>::New();polyData->SetPoints(points);polyLine->GetPointIds()->SetNumberOfIds(points->GetNumberOfPoints());for (unsigned int i = 0; i < points->GetNumberOfPoints(); i++)polyLine->GetPointIds()->SetId(i, i);cells->InsertNextCell(polyLine);polyData->SetLines(cells);viewer->addModelFromPolyData(polyData, supervoxel_name);
}int main(int argc, char** argv)
{pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered(new pcl::PointCloud<pcl::PointXYZ>);pcl::PCDReader reader;// 读入点云PCD文件reader.read("E:****.pcd", *cloud);cout << "Point cloud data: " << cloud->points.size() << " points" << endl;pcl::ModelCoefficients::Ptr coefficients(new pcl::ModelCoefficients);pcl::PointIndices::Ptr inliers(new pcl::PointIndices);// 创建分割对象pcl::SACSegmentation<pcl::PointXYZ> seg;// 可选择配置,设置模型系数需要优化seg.setOptimizeCoefficients(true);// 必须配置,设置分割的模型类型、所用随机参数估计方法seg.setModelType(pcl::SACMODEL_PLANE);seg.setMethodType(pcl::SAC_RANSAC);seg.setDistanceThreshold(0.02);// 距离阈值 单位m。距离阈值决定了点被认为是局内点时必须满足的条件//seg.setDistanceThreshold(0.15);// 距离阈值 单位m。距离阈值决定了点被认为是局内点时必须满足的条件//距离阈值表示点到估计模型的距离最大值。seg.setInputCloud(cloud);//输入点云seg.segment(*inliers, *coefficients);//实现分割,并存储分割结果到点集合inliers及存储平面模型系数coefficientsif (inliers->indices.size() == 0){PCL_ERROR("Could not estimate a planar model for the given dataset.");return (-1);}//***********************************************************************//-----------输出平面模型的系数 a,b,c,d-----------cout << "Model coefficients: " << coefficients->values[0] << " "<< coefficients->values[1] << " "<< coefficients->values[2] << " "<< coefficients->values[3] << endl;cout << "Model inliers: " << inliers->indices.size() << endl;//***********************************************************************// 提取地面pcl::ExtractIndices<pcl::PointXYZ> extract;extract.setInputCloud(cloud);extract.setIndices(inliers);extract.filter(*cloud_filtered);cout << "Ground cloud after filtering: " << endl;cout << *cloud_filtered << std::endl;pcl::PCDWriter writer;writer.write<pcl::PointXYZ>("3dpoints_ground.pcd", *cloud_filtered, false);// 提取除地面外的物体extract.setNegative(true);extract.filter(*cloud_filtered);cout << "Object cloud after filtering: " << endl;cout << *cloud_filtered << endl;//writer.write<pcl::PointXYZ>(".pcd", *cloud_filtered, false);// 点云可视化boost::shared_ptr<pcl::visualization::PCLVisualizer>viewer0(new pcl::visualization::PCLVisualizer("显示点云"));//左边窗口显示输入的点云,右边的窗口显示分割后的点云int v1(0), v2(0);viewer0->createViewPort(0, 0, 0.5, 1, v1);viewer0->createViewPort(0.5, 0, 1, 1, v2);viewer0->setBackgroundColor(0, 0, 0, v1);viewer0->setBackgroundColor(0.3, 0.3, 0.3, v2);pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> color_in(cloud, 255, 0, 0);viewer0->addPointCloud<pcl::PointXYZ>(cloud, color_in, "cloud_in", v1);viewer0->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "cloud_in", v1);viewer0->addPointCloud<pcl::PointXYZ>(cloud_filtered, "cloud_out", v2);viewer0->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 0, 255, 0, "cloud_out", v2);viewer0->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "cloud_out", v2);while (!viewer0->wasStopped()){viewer0->spinOnce(100);boost::this_thread::sleep(boost::posix_time::microseconds(1000));}//***********************************************************************//超体聚类 float voxel_resolution = 0.01f; // 设置体素大小,该设置决定底层八叉树的叶子尺寸float seed_resolution = 0.15f; // 设置种子大小,该设置决定超体素的大小float color_importance = 0.0f; // 设置颜色在距离测试公式中的权重,即颜色影响超体素分割结果的比重。 真实点云都是一个颜色,所以这个参数无作用float spatial_importance = 0.9f; // 设置空间距离在距离测试公式中的权重,较高的值会构建非常规则的超体素,较低的值产生的体素会按照法线float normal_importance = 4.0f; // 设置法向量的权重,即表面法向量影响超体素分割结果的比重。bool use_single_cam_transform = false;bool use_supervoxel_refinement = false;unsigned int k_factor = 0;//voxel_resolution is the resolution (in meters) of voxels used、seed_resolution is the average size (in meters) of resulting supervoxels pcl::SupervoxelClustering<PointT> super(voxel_resolution, seed_resolution);super.setUseSingleCameraTransform(use_single_cam_transform);super.setInputCloud(cloud_filtered); //cloud_filteredsuper.setColorImportance(color_importance);//Set the importance of spatial distance for supervoxels.super.setSpatialImportance(spatial_importance);//Set the importance of scalar normal product for supervoxels. super.setNormalImportance(normal_importance);std::map<uint32_t, pcl::Supervoxel<PointT>::Ptr> supervoxel_clusters;super.extract(supervoxel_clusters);std::multimap<uint32_t, uint32_t> supervoxel_adjacency;super.getSupervoxelAdjacency(supervoxel_adjacency);pcl::PointCloud<pcl::PointNormal>::Ptr sv_centroid_normal_cloud = pcl::SupervoxelClustering<PointT>::makeSupervoxelNormalCloud(supervoxel_clusters);cout << "超体素分割的体素个数为:" << supervoxel_clusters.size() << endl;// 获取点云对应的超体素分割标签pcl::PointCloud<pcl::PointXYZL>::Ptr supervoxel_cloud = super.getLabeledCloud();pcl::visualization::PCLVisualizer::Ptr viewer1(new pcl::visualization::PCLVisualizer("VCCS"));viewer1->setWindowName("超体素分割");viewer1->addPointCloud(supervoxel_cloud, "超体素分割");viewer1->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "超体素分割");viewer1->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_OPACITY, 0.5, "超体素分割");//-----------------------------------------获得体素点云的邻接单元----------------------------------------------multimap<uint32_t, uint32_t>SupervoxelAdjacency;super.getSupervoxelAdjacency(SupervoxelAdjacency);for (auto label_itr = SupervoxelAdjacency.cbegin(); label_itr != SupervoxelAdjacency.cend();){uint32_t super_label = label_itr->first;//获取体素单元的标签pcl::Supervoxel<pcl::PointXYZ>::Ptr super_cloud = supervoxel_clusters.at(super_label);//把对应标签内的点云、体素质心、以及质心对应的法向量提取出来pcl::PointCloud<pcl::PointXYZRGBA> adjacent_supervoxel_centers;for (auto adjacent_itr = SupervoxelAdjacency.equal_range(super_label).first; adjacent_itr != SupervoxelAdjacency.equal_range(super_label).second; ++adjacent_itr){pcl::Supervoxel<pcl::PointXYZ>::Ptr neighbor_supervoxel = supervoxel_clusters.at(adjacent_itr->second);adjacent_supervoxel_centers.push_back(neighbor_supervoxel->centroid_);}std::stringstream ss;ss << "supervoxel_" << super_label;addSupervoxelConnectionsToViewer(super_cloud->centroid_, adjacent_supervoxel_centers, ss.str(), viewer1);label_itr = SupervoxelAdjacency.upper_bound(super_label);}// 等待直到可视化窗口关闭while (!viewer1->wasStopped()){viewer1->spinOnce(100);boost::this_thread::sleep(boost::posix_time::microseconds(1000));}//return 0;//***********************************************************************//LCCP分割float concavity_tolerance_threshold = 10;float smoothness_threshold = 0.8;uint32_t min_segment_size = 0;bool use_extended_convexity = false;bool use_sanity_criterion = false;pcl::LCCPSegmentation<PointT> lccp;lccp.setConcavityToleranceThreshold(concavity_tolerance_threshold);//CC效验beta值lccp.setSmoothnessCheck(true, voxel_resolution, seed_resolution, smoothness_threshold);lccp.setKFactor(k_factor); //CC效验的k邻点lccp.setInputSupervoxels(supervoxel_clusters, supervoxel_adjacency);lccp.setMinSegmentSize(min_segment_size);//最小分割尺寸lccp.segment();pcl::PointCloud<pcl::PointXYZL>::Ptr sv_labeled_cloud = super.getLabeledCloud();pcl::PointCloud<pcl::PointXYZL>::Ptr lccp_labeled_cloud = sv_labeled_cloud->makeShared();lccp.relabelCloud(*lccp_labeled_cloud);SuperVoxelAdjacencyList sv_adjacency_list;lccp.getSVAdjacencyList(sv_adjacency_list);pcl::visualization::PCLVisualizer::Ptr viewer2(new pcl::visualization::PCLVisualizer("LCCP超体素分割"));viewer2->setWindowName("LCCP超体素分割");viewer2->addPointCloud(lccp_labeled_cloud, "LCCP超体素分割");viewer2->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "LCCP超体素分割");viewer2->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_OPACITY, 0.5, "LCCP超体素分割");// 等待直到可视化窗口关闭while (!viewer2->wasStopped()){viewer2->spinOnce(100);boost::this_thread::sleep(boost::posix_time::microseconds(1000));}return 0;}三、实验结果
原数据

去除地面后

超体聚类过分割

LCCP分割

四、总结
从实验结果来看,LCCP算法在相似物体场景分割方面有着较好的表现,对于颜色类似但棱角分明的物体可使用该算法。
五、相关链接
[1]PCL-低层次视觉-点云分割(超体聚类)
[2]PCL_使用LCCP进行点云分割
相关文章:
PCL-基于超体聚类的LCCP点云分割
目录 一、LCCP方法二、代码实现三、实验结果四、总结五、相关链接 一、LCCP方法 LCCP指的是Local Convexity-Constrained Patch,即局部凸约束补丁的意思。LCCP方法的基本思想是在图像中找到局部区域内的凸结构,并将这些结构用于分割图像或提取特征。这种…...

git 推送时出现错误 Locking support detected on remote “origin“
背景:代码托管是局域网搭建的gitlab 按照提示配置 lfs.locksverify true 还是没有用。 网上搜索了一番,其中有人提到可能时服务器磁盘满了,连到服务器上 df -h 查看, 发现根目录已经写满了: 使用命令行: d…...

劳动仲裁经验篇【赶紧收藏】
【劳动仲裁】纯经验干货分享,点个关注防止需要时找不到! 当公司决定搞你心态,变相逼退你时,无非就那么些手段,只要你能正确应对,并做好收集证据的准备,就不住畏惧。合理利用法律的武器维护自身…...

QT多媒体编程(一)——音频编程知识详解及MP3音频播放器Demo
目录 引言 一、QtMultimedia模块简介 主要类和功能 二、QtMultimedia相关类及函数解析 QAudioInput QAudioOutput QAudioFormat QMediaPlayer QMediaPlaylist QCamera 三、音频项目实战Demo UI界面 核心代码 运行结果 四、结论 引言 在数字时代,音频…...
MySQL使用教程 最最最实用的零基础教程 直接从安装开始教!!!!
数据构成了我们日益数字化的社会基础。想象一下,从移动应用和银行系统到搜索引擎,再到如 ChatGPT 这样的先进人工智能聊天机器人,这些工具若没有数据支撑,将寸步难行。你有没有好奇过这些海量数据都存放在哪里呢?答案正…...

pycharm怎么使用Anaconda和配置
打开Anaconda Prompt 要删除 Conda 环境 yolov5sconda,你可以使用以下命令: conda remove --name yolov5sconda --all这个命令会删除名为 yolov5sconda 的整个环境,包括其中安装的所有包和依赖项。请在命令提示符或终端中运行此命令。执行此…...

android中打包apk体积优化方案
1.在配置文件AndroidManifest中新增 android:extractNativeLibs"true" 2.在模块build文件下配置支持的cpu,一般配置64的就行了,多配一种so库体积大一倍,择优。 ndk { abiFilters arm64-v8a } 3.在模块builde文件下配置混淆除去无用的资源文件 注:三种…...

Kubernetes常见的3种部署方式
Kubernetes常见的3种部署方式 1. kubeadm2. 二进制包安装3. Minikube💖The Begin💖点点关注,收藏不迷路💖 Kubernetes(K8s)作为容器编排领域的领导者,提供了多种部署方式以适应不同场景的需求。 1. kubeadm 简介:Kubernetes官方推荐的集群部署工具。特点:简单易用…...

什么情况?我代码没了
前两天检视代码时,发现PR里面有两个提交的描述信息一模一样,于是我提出应该将这两个提交合并成一个,保持提交树的清晰。 1 先储存起来! 而同事这时正在开发别的特性,工作区不是干净的,没法直接执行 git r…...

关于Unity四种合批技术详解
文章目录 一.静态合批(StaticBatching)1.启用静态合批2.举例说明3.静态合批的限制4.静态合批的优点缺点5.动态指定物品合批 二.动态合批(Dynamic Batching)1.启用动态合批2.合批规则3.举例说明4.使用限制 三.GPU Instancing1.启用GPU Instancing2.启用限制3.举例说明 四.SRP Ba…...

自定义注解+拦截器+redis限流
逻辑:写一个注解,自定义在多少秒内限制访问多少次。 自定义拦截器,对于加了注解的请求,在执行方法前。先检查有没有注解,如果有注解就将请求的ipurl拼接作为key。 查询redis中有没有该key,没有就存入&…...

Springcloud物流配送后台-计算机毕业设计源码69809
目 录 摘要 1 绪论 1.1 选题背景与意义 1.2国内外研究现状 1.3论文结构与章节安排 2 物流配送后台系统分析 2.1 可行性分析 2.1.1 技术可行性分析 2.1.2 经济可行性分析 2.1.3 操作可行性分析 2.2 系统流程分析 2.2.1数据增加流程 2.2.2 数据修改流程 2.2.3 数据…...

【Java面试篇】数据埋点监控页面pv的SDK接口实现
面试题如下: 题目要求你实现一个 Monitor.counter(String code, String dim) 接口,用于监控数据统计。 具体要求: 数据聚合: 你需要按照 code 和 dim 的组合进行数据聚合, code 代表监控项的唯一标识, dim 为自定义维度。上报频率: 每分钟上报一次聚合后的数据。数据保证…...

vue3直播视频流easy-player
vue3直播视频流easy-player <script src"/easyPlayer/EasyPlayer-element.min.js"></script> easyPlayer文件下载地址 https://download.csdn.net/download/weixin_42120669/89605739 <template><div class"container"><div …...
)
Python笔试面试题AI答之面向对象(3)
文章目录 12.Python中OOPS是什么?1. 类(Class)2. 对象(Object)3. 面向对象编程的主要特性4. 面向对象编程的优点 13.解释一下Python中的继承?继承的基本语法继承的特性继承的类型 14. 什么是封装࿱…...

vulnhub靶场serial-php渗透(蜥蜴细!)
目录 一、信息收集 1.探测主机存活(目标主机IP地址) 2.访问web服务 3.后台目录和端口扫描 4.解析bak.zip源码 二、漏洞利用 1.构造payload 2.通过bp的repeater模块 3.get shell 4.获取反弹shell 三、提升权限 1. 查看系统版本,内核…...
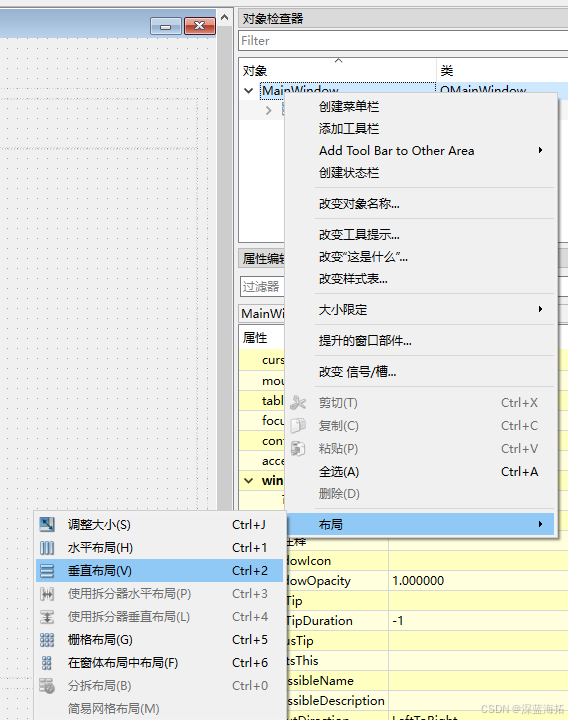
Qt Designer,仿作一个ui界面的练习(一):界面的基本布局
初学不要太复杂,先做一个结构简单的,大致规划一下功能分区,绘制草图: 最终的效果: 界面主要由顶边栏、侧边栏、内容区构成。顶边栏左边是logo,右边是时钟显示。侧边栏最上边是切换按钮,用以动画…...

《深入了解 Postman 接口测试工具》
在现代 Web 开发中,接口测试是确保系统稳定性和可靠性的关键环节。Postman 作为一款强大的接口测试工具,为开发者和测试人员提供了便捷、高效的测试体验。本文将深入详解 Postman 的各项功能和使用方法。 一、Postman 简介 Postman 是一款功能丰富的 A…...

java使用org.apache.commons:commons-compress解压 .7z压缩包
前言 java使用org.apache.commons:commons-compress解压 .7z压缩包 一、使用步骤 1.引入库 代码如下(示例):cpmpress需要用到xz依赖,不一起引入会报错。 <!-- https://mvnrepository.com/artifact/org.tukaani/xz --> …...

通过知识库系统实现卓越医疗保健
提供更好的患者治疗效果;提高医疗保健组织的效率和有效性。 利用 Baklib 的力量 Baklib 使患者、代理人和专业人员能够轻松采用知识库系统。 1.对于患者 通过自助在线知识库提供有关药品、测试、服务、康复等的信息,改善患者体验和健康结果。 2.对于…...

Python基础语法:常用内置函数
round():四舍五入 # 省略 ndigits print(round(3.14)) # 输出 3(int) print(round(3.66)) # 输出 4# 指定 ndigits print(round(3.14159, 2)) # 输出 3.14(float) print(round(3.666, 2)) # 输出 3.67# …...
到panic:深入Linux 5.4内核,看异常处理如何层层递进)
从BUG()到panic:深入Linux 5.4内核,看异常处理如何层层递进
从BUG()到panic:Linux内核异常处理的防御体系全解析当你在深夜调试一个内核模块时,突然屏幕刷出一串红色警告——这可能是每个Linux内核开发者都经历过的噩梦时刻。但你是否想过,从第一行警告出现到系统完全崩溃,内核究竟经历了怎…...

告别浪费!SolidWorks企业级共享方案,实现降本增效全攻略
还在为 SolidWorks 高昂的硬件投入和混乱的图纸管理头疼?告别“一人一机”的浪费模式,企业级共享方案才是降本增效的正解。这套攻略基于“1 台高性能服务器 云飞云共享云桌面”架构,帮你把硬件成本砍掉 60%,把软件利用率翻倍。一…...

文件-语言-系统:基础IO-2.0——IO重定向接口,语言层缓冲区,系统级缓冲区。内核级分析!
bit::Shadow✧(≖ ◡ ≖✿ 目录 重定向接口dup2() ">" ">>" "<" 函数原型 输出重定向1和2的使用 文件描述符表 ./a.out运行: "./a.out >"默认重定向是fd 1 合并标准输入输出 缓冲区 什么是缓冲…...

可解释AI新突破:基于局部帕累托最优的模型解释框架
1. 项目概述:当AI模型成为“黑箱”,我们如何撬开它?在机器学习项目里摸爬滚打十几年,我见过太多这样的场景:团队花大力气训练出一个准确率高达95%的复杂模型(比如深度神经网络),业务…...

PCL 法向量夹角剔除错误匹配点对【2026最新版】
目录 一、 算法简介 1、主要函数 2、参考文献 二、 代码实现 三、 结果展示 四、 参考链接 博客长期更新,本文最新更新时间为:2026年5月24日。代码在PCL1.15.1中测试通过 一、 算法简介 在三维点云配准中,对应点(correspondence)的准确性直接决定了配准算法的精度和鲁棒性…...

对比按量计费与Token Plan套餐的实际成本差异
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 对比按量计费与Token Plan套餐的实际成本差异 在构建和运营基于大模型的应用时,成本控制是一个核心的工程考量。Taotok…...

taotoken用量看板如何帮助团队精细化管理api调用成本
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 taotoken用量看板如何帮助团队精细化管理api调用成本 对于团队管理者而言,将大模型能力集成到产品开发或业务流程中&am…...

终极指南:用AlwaysOnTop免费开源工具彻底改变你的Windows工作方式
终极指南:用AlwaysOnTop免费开源工具彻底改变你的Windows工作方式 【免费下载链接】AlwaysOnTop Make a Windows application always run on top 项目地址: https://gitcode.com/gh_mirrors/al/AlwaysOnTop 你是否经常在多个窗口间来回切换,浪费宝…...

当B站字幕不再只是弹幕:你的个人学习宝库解锁指南
当B站字幕不再只是弹幕:你的个人学习宝库解锁指南 【免费下载链接】BiliBiliCCSubtitle 一个用于下载B站(哔哩哔哩)CC字幕及转换的工具; 项目地址: https://gitcode.com/gh_mirrors/bi/BiliBiliCCSubtitle 还记得那个深夜吗?你正在B站追着某个技术…...