ubuntu20复现NBV探索
官网代码
后退地平线下一个最佳景观规划师
这个代码有些久远,issue里面有人已经在ubuntu20里面使用了3dmr,但是他那个代码我也运行不成功,docker网络一直也不佳,所以还是自己重新修改源码靠谱。
最终实现的代码等有时间上传到github上。
最终实现的代码:下载后直接编译,我前面配置过环境所以都不缺,如果有什么缺的可以回复,我完善下。
GitHub - anning808/nbvplanner: A real-time capable exploration and inspection path planner (next best view planning)
catkin build
roslaunch interface_nbvp_rotors flat_exploration.launch
规划器的安装和执行
要运行当前版本,请编译包 nbvplanner。要获取它,请导航到 ros 工作区的源文件夹:
git clone https://github.com/ethz-asl/nbvplanner.git
cd nbvplanner git submodule init --
git submodule sync --recursive
git submodule update --recursive
cd ..
此外,请确保您拥有所有必要的库:
sudo apt-get install ros-noetic-octomap-*
sudo apt-get install python-catkin-tools
编译问题:
-
rotors_gazebo_plugins/common.h 添加 #include <gazebo/sensors/Sensor.hh>
-
gazebo_odometry_plugin.cpp 更改:
octomath::Vector3 p = to_check.top();
if ((p.x() > bounding_box_origin.x - bounding_box_lengths.x / 2) &&(p.x() < bounding_box_origin.x + bounding_box_lengths.x / 2) &&(p.y() > bounding_box_origin.y - bounding_box_lengths.y / 2) &&(p.y() < bounding_box_origin.y + bounding_box_lengths.y / 2) &&(p.z() > bounding_box_origin.z - bounding_box_lengths.z / 2) &&(p.z() < bounding_box_origin.z + bounding_box_lengths.z / 2) &&(!octomap_->search(p))) {octomap_->setNodeValue(p, 0);改为 :
ignition::math::Vector3<double> p = to_check.top();octomap::point3d point(p.X(), p.Y(), p.Z());if ((p.X() > bounding_box_origin.X() - bounding_box_lengths.X() / 2) &&(p.X() < bounding_box_origin.X() + bounding_box_lengths.X() / 2) &&(p.Y() > bounding_box_origin.Y() - bounding_box_lengths.Y() / 2) &&(p.Y() < bounding_box_origin.Y() + bounding_box_lengths.Y() / 2) &&(p.Z() > bounding_box_origin.Z() - bounding_box_lengths.Z() / 2) &&(p.Z() < bounding_box_origin.Z() + bounding_box_lengths.Z() / 2) &&(!octomap_->search(point))) {octomap_->setNodeValue(point, 0);3.版本不同需要更换的内容,使用vscode全局搜索,全局替换(有部分不是全局修改)
最好选择一个个编译,一个一个改。
-
全局替换:add_definitions(-std=c++11) →add_definitions(-std=c++14)
-
全局替换:GetPhysicsEngine() →Physics()
-
全局替换:#include <gazebo/math/Vector3.hh> → #include <ignition/math.hh>
-
全局替换:math::Vector3 → ignition::math::Vector3<double>
-
全局替换:event::Events::DisconnectWorldUpdateBegin(updateConnection); → this->updateConnection.reset();
-
全局替换:GetSimTime →SimTime
-
全局替换:include_directories(${Eigen_INCLUDE_DIRS} ${catkin_INCLUDE_DIRS}) → include_directories(${Eigen_INCLUDE_DIRS} ${catkin_INCLUDE_DIRS} ../../../devel/include)
-
全局替换:GetAngle(0).Radian(); → Position(0);
-
全局替换:event::Events::DisconnectWorldUpdateBegin(update_connection_); → this->updateConnection.reset();
-
GetGlobalAxis →GlobalAxis
-
math::Quaternion → ignition::math::Quaternion<double>
-
GetWorldCoGPose →WorldCoGPose
-
pose_difference.rot.RotateVector →pose_difference.Rot().RotateVector
-
GetRelativeLinearVel → RelativeLinearVel
-
GetWorldPose → WorldPose
-
GetEntity → EntityByName
-
GetRelativeAngularVel → RelativeAngularVel
-
.rot. → .Rot().
-
.rot → .Rot()
-
GetInverse → Inverse
-
sdf::Vector3 → ignition::math::Vector3<double>
-
CV_LOAD_IMAGE_GRAYSCALE -> cv::IMREAD_GRAYSCALE
-
GetRelativeLinearAccel -> RelativeLinearAccel
-
GetWorldAngularVel -> WorldAngularVel
-
GetLength -> Length
-
参考:
官方7-》8的迁移记录,可以换tag找其他版本
https://github.com/gazebosim/gazebo-classic/blob/gazebo8_8.0.0_beta1/Migration.md
gazebo7---->gazebo9代码迁移_event::events::disconnectworldupdatebegin(this->up-CSDN博客
编译nbv_planner遇到的问题_nbvplanner-CSDN博客
4.usr/bin/ld: 找不到 -lUUID::UUID sudo apt-get install uuid-dev 还是找不到就自己软链接:locate libuuid搜索位置 然后创建软链接 cd /usr/lib/ sudo ln -s x86_64-linux-gnu/libuuid.so libUUID::UUID.so
5.error: ‘class ignition::math::v6::Vector3<double>’ has no member named ‘x’ 类似很多vel.z的xyz的格式改为 vel→X()格式,但是不能全局替换,只能根据报错部分一点点替换改为大写的X()Y()Z()
6.将 interface_nbvp_rotors 的 CMakeLists.txt 从
include_directories(${Eigen_INCLUDE_DIRS} ${catkin_INCLUDE_DIRS})
更改为
include_directories(${Eigen_INCLUDE_DIRS} ${catkin_INCLUDE_DIRS} ../../../devel/include)
7.修改添加头文件 gazebo_imu_plugin.cpp里面的
gravity_W_ = world->Physics()->GetGravity();
imu_parameters.gravity_magnitude = gravity_W_.GetLength();
更换为
#include <gazebo/physics/World.hh>(添加到最前面)
(替换上面位置) gravity_W_ = world_->Physics()->World()->Gravity();imu_parameters_.gravity_magnitude = gravity_W_.Length();
编译
catkin build
成功!

几个运行问题:
对于模拟演示启动
运行失败noetic启动方式改变:
$(find rotors_description)/scripts/xacro.py
改为:
$(find rotors_description)/scripts/xacro

还有部分问题根据别人的回答解决:
Error running demo launch file · Issue #30 · ethz-asl/nbvplanner · GitHub
https://orfaustria1.com/?_=/ethz-asl/rotors_simulator/issues/710#KJWqMdlUlBnsIvkdRR+uhIT4
运行:
roslaunch interface_nbvp_rotors flat_exploration.launch
成功!
相关文章:
ubuntu20复现NBV探索
官网代码 后退地平线下一个最佳景观规划师 这个代码有些久远,issue里面有人已经在ubuntu20里面使用了3dmr,但是他那个代码我也运行不成功,docker网络一直也不佳,所以还是自己重新修改源码靠谱。 最终实现的代码等有时间上传到gi…...
【51单片机仿真】基于51单片机设计的温湿度采集检测系统仿真源码文档视频——文末资料下载
演示 目录 1.系统功能 2.背景介绍 3.硬件电路设计 4.软件设计 4.1 主程序设计 4.2 温湿度采集模块程序设计 4.3 LCD显示屏程序设计 5.系统测试 6.结束语 源码、仿真、文档视频等资料下载链接 1.系统功能 该系统通过与AT89C51单片机、LCD1602显示屏和DHT11温湿度传感器…...

【Hadoop-驯化】一文学会hadoop访问hdfs中常用命令使用技巧
【Hadoop-驯化】一文学会hadoop访问hdfs中常用命令使用技巧 本次修炼方法请往下查看 🌈 欢迎莅临我的个人主页 👈这里是我工作、学习、实践 IT领域、真诚分享 踩坑集合,智慧小天地! 🎇 免费获取相关内容文档关注&am…...

【Spring】Bean详细解析
1.Spring Bean的生命周期 整体上可以简单分为四步:实例化 —> 属性赋值 —> 初始化 —> 销毁。初始化这一步涉及到的步骤比较多,包含 Aware 接口的依赖注入、BeanPostProcessor 在初始化前后的处理以及 InitializingBean 和 init-method 的初始…...

决策树总结
决策树总结 决策树是一种广泛应用的机器学习算法,它模拟了人类进行决策时的逻辑思维过程,通过构建一棵树状结构来进行数据的分类或回归预测。决策树模型因其直观易懂、易于解释、能够处理多类问题以及无需进行复杂的特征缩放等优点,在数据挖…...

通俗易懂!495页看漫画学Python入门教程(全彩版)Git首发破万Star
前言 在编程的世界里,Python无疑是一颗璀璨的明星。从最初作为打发圣诞节闲暇时间的项目,到如今成为最受欢迎的程序设计语言之一,Python以其简洁、易学、强大的特点吸引了无数编程爱好者。然而,对于初学者来说,编程的…...

websocket实现简易聊天室
websocket实现简易聊天室 又做了一个关于websocket广播和在线人数统计的练习,实现一个简易的聊天室。 前端vue3 前端里的内容主要包含: 1.css的animation来实现公告从右到左的轮播。 2.websocket的onmessage里对不同消息的处理。 <template>&l…...
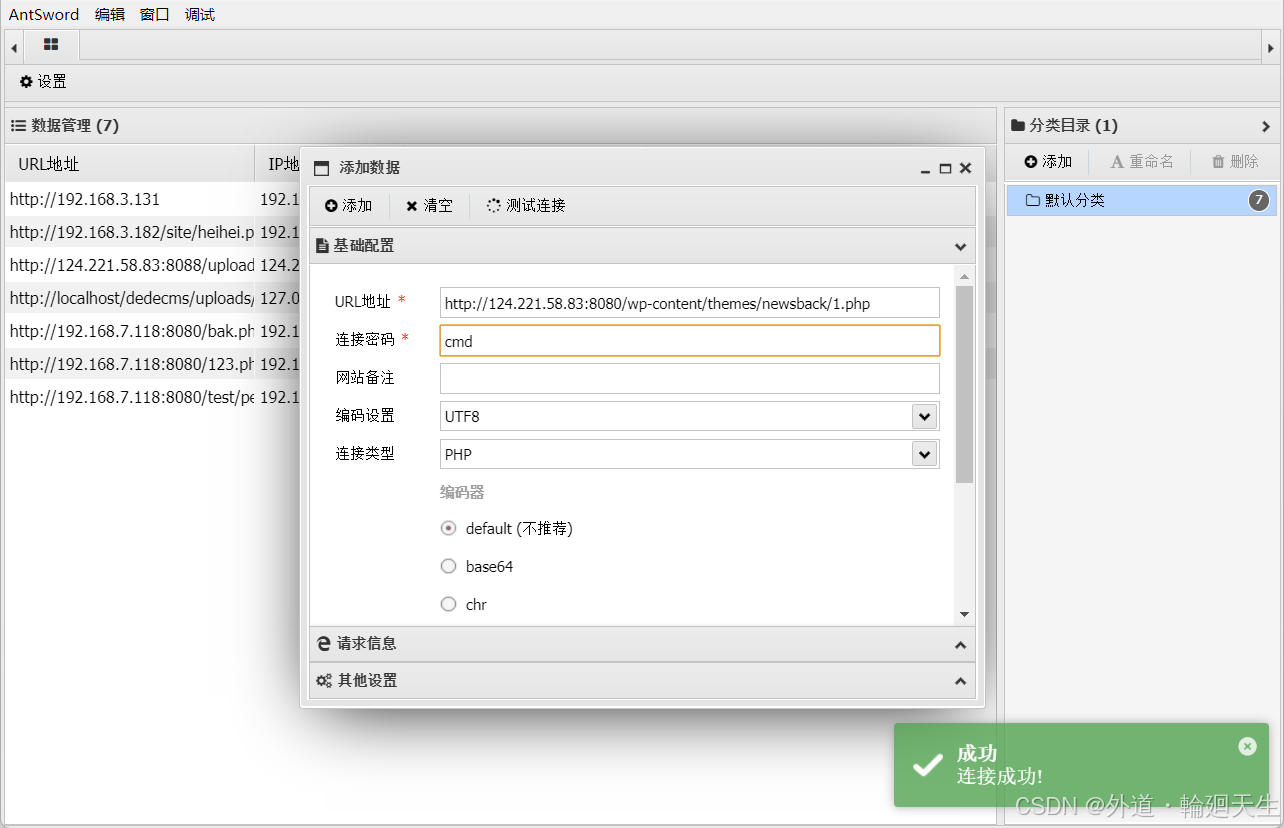
vulhub-wordpress
1.打开wordpress关卡,选择简体中文 添加信息——点击安装WordPress 安装完成——登录 点击外观——编辑主题 可以加入一句话木马,但是我写入的是探针文件 也可以去上传一个带有木马的主题 上传之后会自动解压 1.php就是里面的木马文件...
【机器学习算法基础】(基础机器学习课程)-10-逻辑回归-笔记
一、模型的保存与加载 逻辑回归是一种常见的机器学习算法,广泛用于分类问题。为了在不同的时间或环境下使用训练好的模型,我们通常需要将其保存和加载。 保存模型 训练模型:首先,你需要用你的数据训练一个逻辑回归模型。例如&…...

自动驾驶行业知识汇总
应届生月薪2W的自动驾驶开发、机器人、后端开发,软件开发该如何学习相关技术栈_哔哩哔哩_bilibili 两万字详解自动驾驶开发工具链的现状与趋势 (qq.com) 九章智驾 - 2023年度文章大合集 (qq.com) 九章 - 2022年度文章大合集 (qq.com)...

C#根据反射操作对象
前言 反射使用,让我们的程序可以动态增加一些功能,让原本固化的步骤逻辑变得动态,这是它的优点。当然使用反射首次加载会有性能损耗以及使用复杂;但是现在大家都在讲动态,使用好它应该是一个重要的编程理念提升。MVC、…...
为exe文件)
打包python脚本(flask、jinja2)为exe文件
20240803 概述 在我很早时候学习python的时候,就利用过某个工具将其打包为exe文件,然后在没有python环境的机器上运行,这样可以减少安装python环境和各种库的过程。 最近在开发一个在虚拟机上运行的程序的时候就遇到了打包一些环境的问题&…...
嵌入式初学-C语言-练习三
#部分题目可能在之前的博客中有,请谅解,保证常见题型均被发出# 1.计算n以内所有正奇数的和 ? n值通过键盘输入 代码: 1 /*2 需求:计算n以内所有正奇数的和 ? n值通过键盘输入3 */4 #include <stdio.h>5 6 int main()7 …...
最新版Sonible Plugins Bundle v2024 winmac,简单智能,持续更新长期有效
一。Sonible Plugins Bundle v2024 win&mac Sonible Plugins Bundle是一款以创作者为中心的智能音频插件系列。这些工具的特点是易于使用,搭配高级处理和优质音质。pure:bundle的所有插件都由sonible的智能插件系列中使用的技术驱动,但在设计时考虑到…...

J032_实现简易版的B/S架构
一、需求描述 实现简易版的B/S架构 1.1 Server package com.itheima.tcp4;import java.io.IOException; import java.net.ServerSocket; import java.net.Socket; import java.util.concurrent.ArrayBlockingQueue; import java.util.concurrent.Executors; import java.uti…...

【前端面试】五、框架
目录 1 Vue2 2 Vue3 3 React 4 Angular 1 Vue2 Vue2 是目前仍被广泛使用的前端框架之一,其特点包括响应式数据绑定、组件化开发等。 响应式系统:Vue2 使用 Object.defineProperty 来实现数据的响应式。每个组件实例在创建时,会将 dat…...

C语言 | Leetcode C语言题解之第316题去除重复字母
题目: 题解: char* removeDuplicateLetters(char* s) {int vis[26], num[26];memset(vis, 0, sizeof(vis));memset(num, 0, sizeof(num));int n strlen(s);for (int i 0; i < n; i) {num[s[i] - a];}char* stk malloc(sizeof(char) * 27);int stk…...

本地部署 Llama-3-EvoVLM-JP-v2
本地部署 Llama-3-EvoVLM-JP-v2 0. 引言1. 关于 Llama-3-EvoVLM-JP-v22. 本地部署2-0. 克隆代码2-1. 安装依赖模块2-2. 创建 Web UI2-3.启动 Web UI2-4. 访问 Web UI 0. 引言 Sakana AI 提出了一种称为进化模型合并的方法,并使用该方法创建大规模语言模型ÿ…...

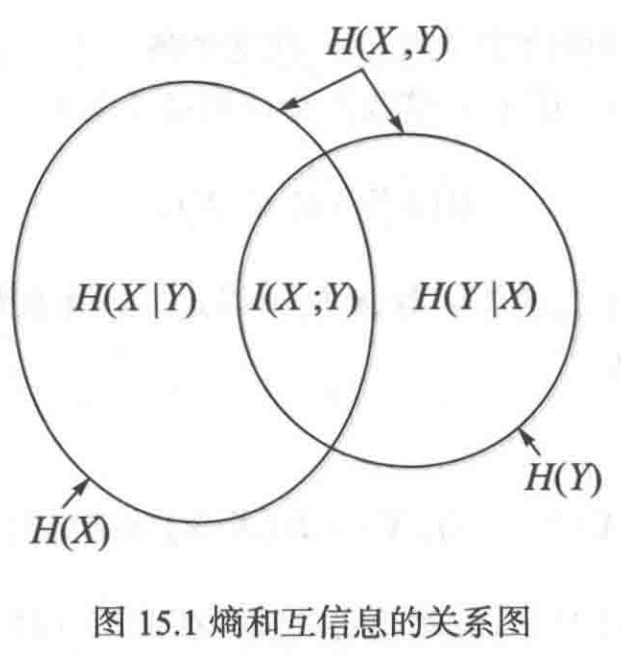
Evaluating the Generation Capabilities of Large Chinese Language Models
文章目录 题目摘要相关工作CG-Eval实验 题目 评估大型中文语言模型的生成能力 论文地址:https://arxiv.org/abs/2308.04823 项目地址:http://cgeval.besteasy.com/ 摘要 本文介绍了 CG-Eval,这是有史以来第一个全面的自动化评估框架…...

YOLOv8添加注意力模块并测试和训练
YOLOv8添加注意力模块并测试和训练 参考bilibili视频 yolov8代码库中写好了注意力模块,但是yolov8的yaml文件中并没用使用它,如下图的通道注意力和空间注意力以及两者的结合CBAM,打开conv.py文件可以看到,其中包含了各种卷积块的…...
)
浏览器访问 AWS ECS 上部署的 Docker 容器(监听 80 端口)
✅ 一、ECS 服务配置 Dockerfile 确保监听 80 端口 EXPOSE 80 CMD ["nginx", "-g", "daemon off;"]或 EXPOSE 80 CMD ["python3", "-m", "http.server", "80"]任务定义(Task Definition&…...

C++_核心编程_多态案例二-制作饮品
#include <iostream> #include <string> using namespace std;/*制作饮品的大致流程为:煮水 - 冲泡 - 倒入杯中 - 加入辅料 利用多态技术实现本案例,提供抽象制作饮品基类,提供子类制作咖啡和茶叶*//*基类*/ class AbstractDr…...

在 Nginx Stream 层“改写”MQTT ngx_stream_mqtt_filter_module
1、为什么要修改 CONNECT 报文? 多租户隔离:自动为接入设备追加租户前缀,后端按 ClientID 拆分队列。零代码鉴权:将入站用户名替换为 OAuth Access-Token,后端 Broker 统一校验。灰度发布:根据 IP/地理位写…...
《通信之道——从微积分到 5G》读书总结
第1章 绪 论 1.1 这是一本什么样的书 通信技术,说到底就是数学。 那些最基础、最本质的部分。 1.2 什么是通信 通信 发送方 接收方 承载信息的信号 解调出其中承载的信息 信息在发送方那里被加工成信号(调制) 把信息从信号中抽取出来&am…...
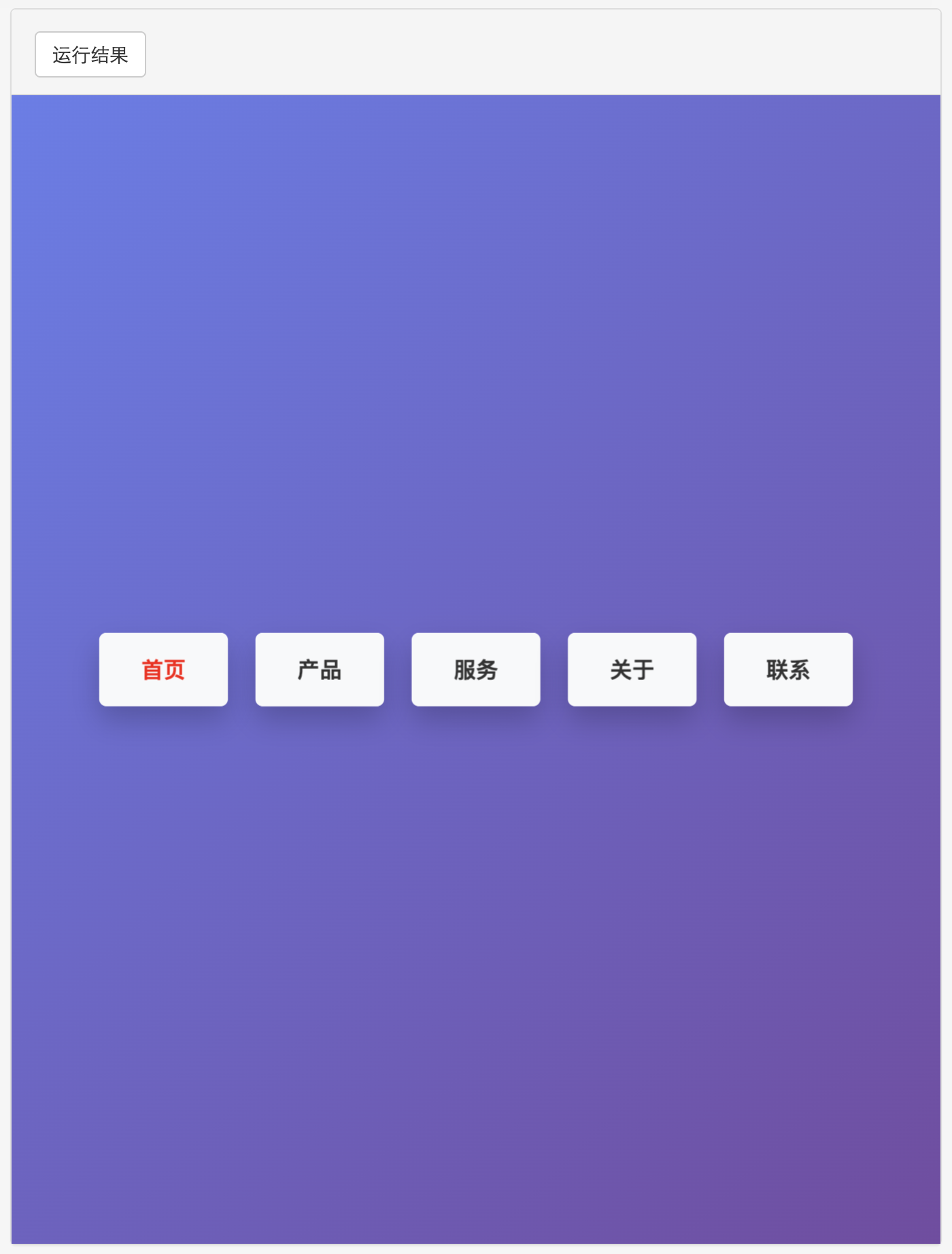
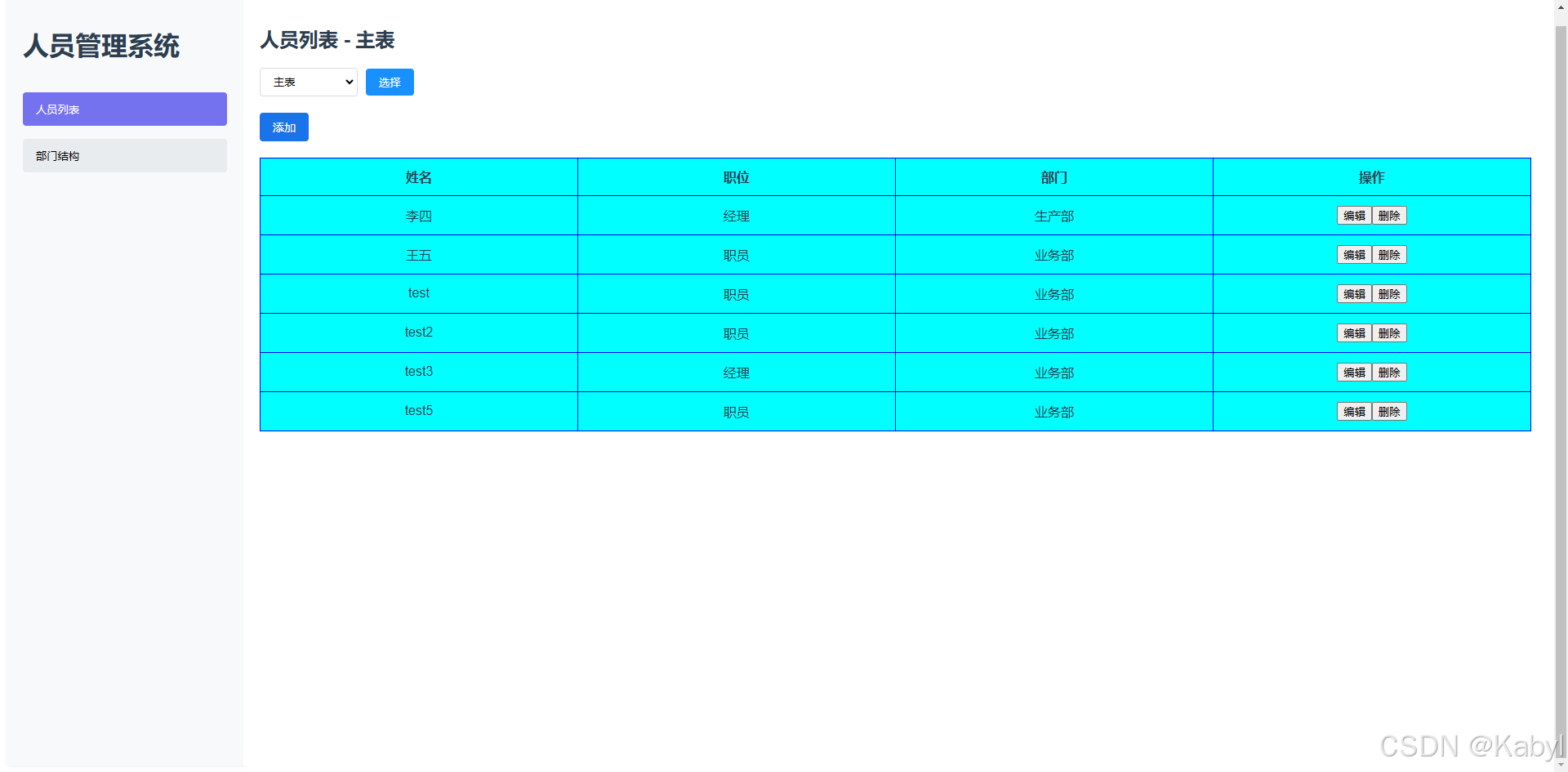
多种风格导航菜单 HTML 实现(附源码)
下面我将为您展示 6 种不同风格的导航菜单实现,每种都包含完整 HTML、CSS 和 JavaScript 代码。 1. 简约水平导航栏 <!DOCTYPE html> <html lang"zh-CN"> <head><meta charset"UTF-8"><meta name"viewport&qu…...
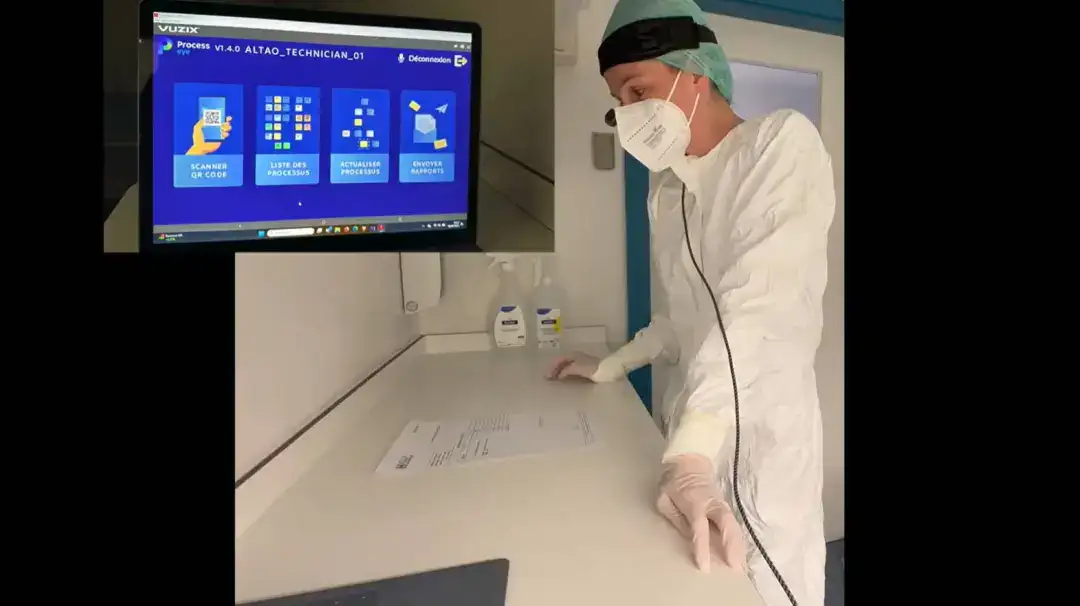
安宝特案例丨Vuzix AR智能眼镜集成专业软件,助力卢森堡医院药房转型,赢得辉瑞创新奖
在Vuzix M400 AR智能眼镜的助力下,卢森堡罗伯特舒曼医院(the Robert Schuman Hospitals, HRS)凭借在无菌制剂生产流程中引入增强现实技术(AR)创新项目,荣获了2024年6月7日由卢森堡医院药剂师协会࿰…...

深度学习之模型压缩三驾马车:模型剪枝、模型量化、知识蒸馏
一、引言 在深度学习中,我们训练出的神经网络往往非常庞大(比如像 ResNet、YOLOv8、Vision Transformer),虽然精度很高,但“太重”了,运行起来很慢,占用内存大,不适合部署到手机、摄…...
系统掌握PyTorch:图解张量、Autograd、DataLoader、nn.Module与实战模型
本文较长,建议点赞收藏,以免遗失。更多AI大模型应用开发学习视频及资料,尽在聚客AI学院。 本文通过代码驱动的方式,系统讲解PyTorch核心概念和实战技巧,涵盖张量操作、自动微分、数据加载、模型构建和训练全流程&#…...

flow_controllers
关键点: 流控制器类型: 同步(Sync):发布操作会阻塞,直到数据被确认发送。异步(Async):发布操作非阻塞,数据发送由后台线程处理。纯同步(PureSync…...
【1】跨越技术栈鸿沟:字节跳动开源TRAE AI编程IDE的实战体验
2024年初,人工智能编程工具领域发生了一次静默的变革。当字节跳动宣布退出其TRAE项目(一款融合大型语言模型能力的云端AI编程IDE)时,技术社区曾短暂叹息。然而这一退场并非终点——通过开源社区的接力,TRAE在WayToAGI等…...