【STM32+HAL】杆球控制系统
一、前言
2017年电赛出了道板球控制系统题目,现写一个简化版本——杆球控制系统,以此记录电赛集训生活。
二、题目分析


最终采取的方案是:OpenMV读取小球的当前位置,并将坐标值传给STM32端,再由32通过电机改变杆的位置来改变乒乓球位置,由此实现闭环控制。模式间切换通过按键实现。
三、 所用工具
1、电机:DengFOC的2208无刷云台电机(无刷电机控制精度更高,算法较舵机难)
2、芯片:STM32F407ZGT6
3、机械结构:建议3D打印,提高精度,减轻算法压力。
四、CubeMX配置
1、控制+计时定时器
频率 frequency = 84MHz / 84 / 1000 = 1000Hz,即周期为1ms。

2、三路PWM输出定时器
FOC控制需三路PWM波,频率设为25kHz。
有关DengFOC的更多内容,请移步B站搜索DengFOC。

3、LCD屏显示配置
详见【STM32+HAL】LCD显示及触摸初始化配置,这里不再赘述。

4、读取AS5600编码器
配置IIC模式读取编码器值,获取当前电机转动角度。

5、串口配置
串口一通过DMA与OpenMV通信,有关串口DMA传输的内容,详见【STM32+HAL】DMA应用

至此,CuebMX配置完毕。
五、OpenMV识别
代码不难,大家自行理解吧。想了解更多OpenMV技术细节详见【OPENMV】学习记录 (持续更新)
import sensor, image, time, ustruct
from pyb import UARTuart = UART(3, 115200, timeout_char=200)
uart.init(115200, bits=8, parity=None, stop=1) # init with given parameters
roi = (30, 50, 126, 22)# 初始化摄像头
sensor.reset() # 初始化感应器
sensor.set_pixformat(sensor.RGB565) # 设置像素格式为RGB565
sensor.set_framesize(sensor.QQVGA) # 设置帧大小为320x240
sensor.set_brightness(-3)
sensor.set_contrast(-3)
sensor.set_saturation(-3)
sensor.set_windowing(roi)
sensor.skip_frames(time = 2000) # 跳过前2秒帧,用于摄像头设置稳定
sensor.set_auto_gain(False) # 必须关闭才能进行颜色跟踪
sensor.set_auto_whitebal(False) # 必须关闭才能进行颜色跟踪
clock = time.clock() # 初始化时钟对象def send_data(x):global uart;uart.write(str(x))uart.write(bytearray([0x20]))# 设置颜色阈值,识别黄色
yellow_threshold = (80, 100, -35, 29, 32, 100)
white_threshole = (90,100,-2,2,-2,2)while(True):clock.tick() # 开始新帧计时sensor.set_hmirror(True)img = sensor.snapshot().lens_corr(1.9).mean(1) # 捕获图像blobs = img.find_blobs([yellow_threshold])if blobs:largest_blob = max(blobs, key=lambda b: b.pixels())# 绘制找到的物体边界框img.draw_rectangle(largest_blob.rect(), color=(255, 0, 0))img.draw_cross(largest_blob.cx(), largest_blob.cy(), color=(255, 0, 0))send_data(largest_blob.cx())
六、Keil填写代码
1、电机控制
此文件包含两个函数:
PID_Control:控制乒乓球运动到指定位置
PID_Sin:控制乒乓球以杆中心做正弦运动
有关无刷电机驱动的内容,详见[STM32+HAL]DengFOC移植之闭环速度控制
#include "Control.h"
#include "tim.h"
#include "FOC2.h"#define KP 0.21 // 比例系数
#define KI 0.000022 // 积分系数
#define KD 13 // 微分系数double Current_position; //小球当前位置
double Target_position; //小球目标位置/* 定点PID控制函数 */
float PID_Control(float Current,float Target)
{double Error, Integral, Derivative, LastError;/*PID算法*/Error = Target - Current; // 当前误差Integral += Error;Derivative = Error - LastError; // E[k]-E[k-1]项/*更新输出值*/float temp = KP * Error + (KI) * Integral + KD * Derivative;temp = (temp > 20 ) ? 20 : (temp < -20) ? -20 :temp; //限幅LastError = Error; // 存储误差,用于下次计算return temp;
}/* Sin运动PID控制函数 */
float PID_Sin(float Current,float Target)
{double Error1, Integral1, Derivative1, LastError1; /*Sin波的PID算法*/float P = 0.5;float D = 3;Error1 = Target - Current; // 当前误差Derivative1 = Error1 - LastError1; /*更新输出值*/float temp = P * Error1 + D * Derivative1;temp = (temp > 20 ) ? 20 : (temp < -20) ? -20 :temp; //限幅LastError1 = Error1;return temp;
}2、LCD显示
/* 界面一: 显示小球目标与当前位置曲线 */
void Show_1(uint8_t flag)
{LCD_ShowString(20,160,100,16,16,"Distance:");LCD_ShowString(160,160,100,16,16,"target_cx:");LCD_ShowString(20,210,100,16,16,"Overshoot:");LCD_ShowString(160,210,100,16,16,"Time:");if(fabs(target_cx - cx) < 2 && flag_Overshoot == 0) //第一次经过目标值时,重置超调量,改变标志位{flag_Overshoot = 1;Max_Overshoot = 0;Overshoot = 0;}if(flag_Overshoot == 1) //判断已经过了一次目标值后的最大偏移{Overshoot = fabs(target_cx - cx);Max_Overshoot = (Max_Overshoot <= Overshoot) ? Overshoot :Max_Overshoot; //取最大值}LCD_ShowNum(95,160,distance,3,16);LCD_ShowNum(240,160,distance_target,3,16);LCD_ShowNum(103,210,(Max_Overshoot - 8.057) / 3.4615,3,16); //距离值与像素转换LCD_ShowNum(240,210,time,5,16);draw_distance_wave1(distance,distance_target); //绘制小球位置曲线
}/* 界面二:两种模式之间切换界面 */
void Show_2(uint8_t flag)
{LCD_ShowString(20,160,100,16,16,"Left point:");LCD_ShowNum(105,160,2,3,16);LCD_ShowString(175,160,100,16,16,"Right point:");LCD_ShowNum(270,160,30,3,16);LCD_ShowString(20,30,100,16,16,"Set Cycle:");LCD_ShowNum(115,30,3,2,16);
}/* 界面三:Sin运动曲线 0 - 30cm */
void Show_3(uint8_t flag)
{LCD_ShowString(20,210,100,16,16,"Left point:");LCD_ShowString(160,210,100,16,16,"Right point:");LCD_ShowString(160,30,100,16,16,"Fact Cycle:");LCD_ShowNum(115,210,2,3,16);LCD_ShowNum(255,210,30,3,16);LCD_ShowNum(255,30,3,3,16);draw_distance_wave(distance); //绘制小球位置曲线
}/* 显示的总菜单 */
void Show(uint8_t flag)
{if(flag != last_flag) LCD_Clear(WHITE);switch (flag){case 1:Show_1(flag),HAL_TIM_Base_Start_IT(&htim2); //界面一,定点控制break;case 2:Show_2(flag),HAL_TIM_Base_Stop_IT(&htim2); //界面二,两种模式停顿切换界面break;case 3:Show_3(flag),HAL_TIM_Base_Start_IT(&htim2); //界面三,Sin运动曲线控制break;default:break;}last_flag = flag;
}
3、mian.c
为缩减篇幅,下附代码删减了部分冗余的代码,相信以大家的聪明才智一定看得懂!
思路:初始化后,当按键按下切换模式后,显示对应的界面,并在定时器回调函数中进行一系列的控制与计时。
int main(void)
{/* USER CODE BEGIN 2 *//* OpenMV接收数据初始化 */__HAL_UART_ENABLE_IT(&huart1, UART_IT_IDLE);HAL_UART_Receive_DMA(&huart1,rx_buffer,RXBUFFERSIZE);/* FOC初始化 */DFOC_Vbus(VMax);DFOC_alignSensor(PP,DIR);HAL_Delay(200);/* LCD初始化 */Show_Init();/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){Show(flag);/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}/* USER CODE BEGIN 4 */
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) //1ms定时器
{ /* 电机定时控制 */if( htim -> Instance == TIM2){/* flag == 1时进入闭环位置控制 */if(flag == 1){if(flag_time_loop == 0) time_loop++; //若不为目标位置,时间周期++time = 1.5 * time_loop; //时间转换target_cx = distance_target * 3.4615 + 8.057;DFOC_M0_set_Force_Angle(PID_Control(cx,target_cx)); //设置位置}/* 当flag == 3时进入曲线控制 */else if(flag == 3){DFOC_M0_set_Force_Angle(PID_Sin(cx,60)); //设置位置}else{time_loop = 0;flag_time_loop = 0;}}
}/* 按键消抖 */
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{if(HAL_GPIO_ReadPin(KEY0_GPIO_Port,KEY0_Pin) == GPIO_PIN_RESET){HAL_Delay(20); //延时消抖if(HAL_GPIO_ReadPin(KEY0_GPIO_Port,KEY0_Pin) == GPIO_PIN_RESET){/* flag切换模式 */flag = (flag + 1) % 4;}}else if(HAL_GPIO_ReadPin(KEY1_GPIO_Port,KEY1_Pin) == GPIO_PIN_RESET){HAL_Delay(20); //延时消抖if(HAL_GPIO_ReadPin(KEY1_GPIO_Port,KEY1_Pin) == GPIO_PIN_RESET){/* distance = 30 切换距离 */distance_target = (distance_target + 1) % 31;}}
}
/* USER CODE END 4 */
七、源码提供
夸克:我用夸克网盘分享了「Ball_Control」,点击链接即可保存。
百度:通过百度网盘分享的文件 提取码:6666
Gitee:Ball_Control
CSDN:Ball_Control
八、成果欣赏
Ball_Control
九、结语
本人能力有限,代码未必是最优解,若有可改进之处望在评论区留言。
如有小伙伴想交流学习心得,欢迎加入群聊751950234,群内不定期更新代码,以及提供本人博客所有源码
相关文章:
【STM32+HAL】杆球控制系统
一、前言 2017年电赛出了道板球控制系统题目,现写一个简化版本——杆球控制系统,以此记录电赛集训生活。 二、题目分析 最终采取的方案是:OpenMV读取小球的当前位置,并将坐标值传给STM32端,再由32通过电机改变杆的位置…...
用Python实现9大回归算法详解——04. 多项式回归算法
多项式回归 是线性回归的一种扩展,它通过将输入特征的多项式项(如平方、立方等)引入模型中,以捕捉数据中非线性的关系。虽然多项式回归属于线性模型的范畴,但它通过增加特征的多项式形式,使得模型能够拟合非…...

vue打包更新packge.json版本号
VUE项目打包自动更新版本号 此方法只针对 Vue 如果使用其他框架,可以此参照作为参考 一、先看效果 二、创建 buildVersion.js 文件 文件内容 目前只针对3位版本号 递增规则是 每次更新 加一次小版本,10次小版本向前递增一个版本。如:1.0.9 递…...

计算机视觉技术解析:从基础到前沿
第一部分:计算机视觉基础与基本原理 计算机视觉是人工智能领域的一个重要分支,旨在使计算机能够理解和处理图像和视频数据。随着深度学习技术的飞速发展,计算机视觉已经在许多实际应用场景中取得了显著的成果,如图像识别、目标检…...

unity游戏开发003:深入理解Unity中的坐标系
Unity游戏开发 “好读书,不求甚解;每有会意,便欣然忘食。” 本文目录: Unity游戏开发 Unity游戏开发深入理解Unity中的坐标系前言1. 坐标轴2. 左手坐标系3. 世界坐标系 vs. 局部坐标系4. 坐标变换5. 注意事项 总结 深入理解Unity中…...

伊索寓言两则
马和驴 马为自己精美的马具感到骄傲,在大马路上遇见了驴子子正驮着重担挪着步子,挡了路,马儿没法过去,就不耐烦叫道:真想踢你两脚,好让你走快点。驴子沉默不语,但没忘马儿的傲慢。不久后马儿患…...

嵌入式硬件产品开发:编码文件规则
目录 简介 文件内容的一般规则 文件名命名的规则 简介 一个工程是往往由多个文件组成。 这些文件怎么管理、怎么命名都是非常重要的。 文件内容的一般规则 【规则1】每个头文件和源文件的头部必须包含文件头部说明和修改记录。 源文件和头文件的头部说明必须包含的内容和次…...

设计模式 - 组合模式
💝💝💝首先,欢迎各位来到我的博客!本文深入理解设计模式原理、应用技巧、强调实战操作,提供代码示例和解决方案,适合有一定编程基础并希望提升设计能力的开发者,帮助读者快速掌握并灵活运用设计模式。 💝💝💝如有需要请大家订阅我的专栏【设计模式】哟!我会定…...
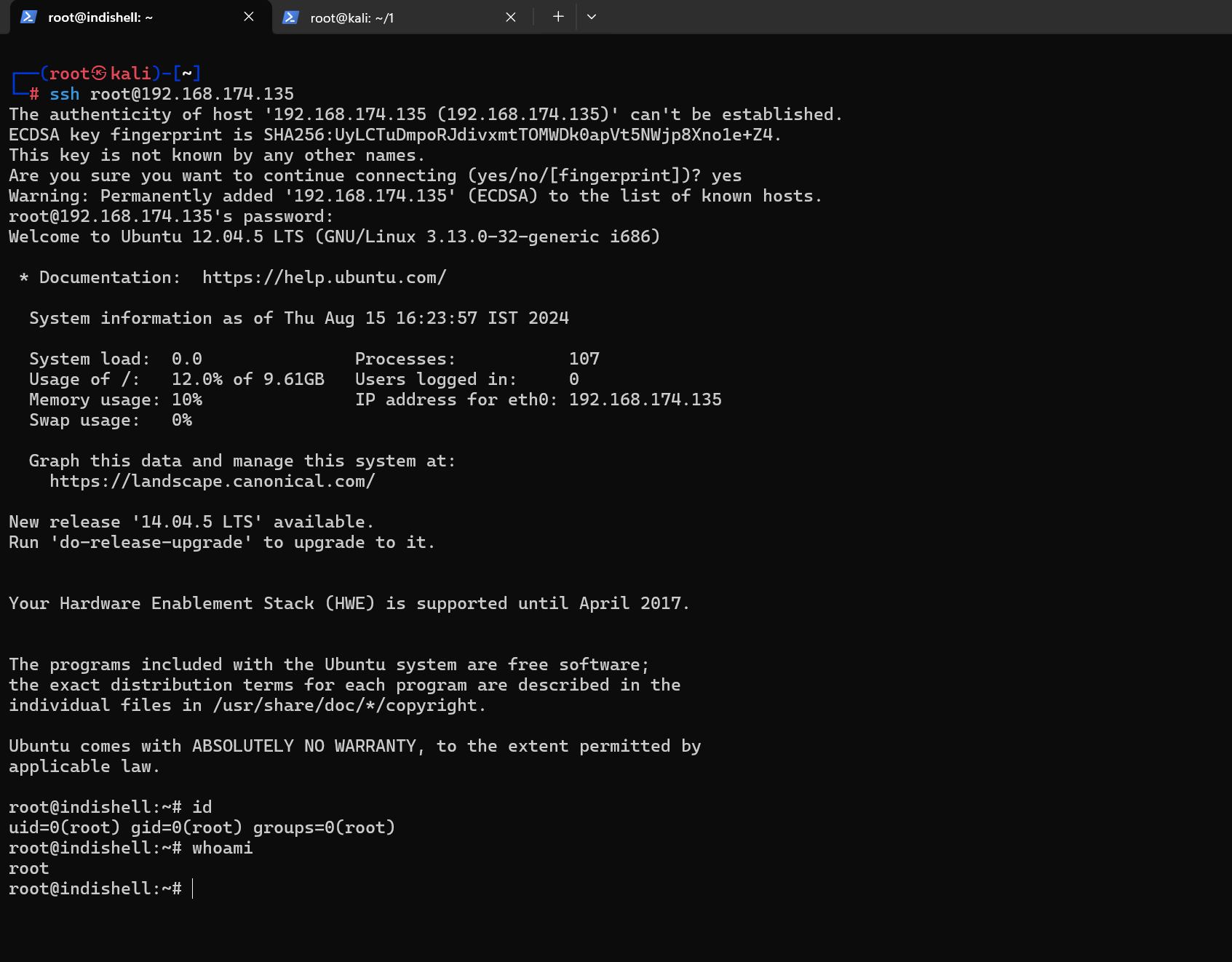
打靶记录11——Billu_b0x
靶机: https://download.vulnhub.com/billu/Billu_b0x.zip难度: 中(两种攻击路线) 目标: 取得root权限 涉及的攻击方法: 主机发现端口扫描Web信息收集SQL注入(Sqlmap跑不出来)…...

一、在cubemx上配置sd和fatfs示例演示
一、sd和fatfs的配置流程界面 1、选择sd4bits 根据自己的sd卡的硬件插槽进行选择。 2、fatfs配置由于使用的是sd卡所以直接选择sd选项 3、程序中对sd卡的初始化需要进行改动,直接使用默认的参数sd卡是挂载不上的。 4、在sd卡挂载好后,就可以使用文件系统…...

C++ 语言特性02 - 命名空间
一:概述 现代C中的命名空间是什么? C中的命名空间允许用户在命名空间范围内对类、方法、变量和函数等实体进行分组,而不是在全局范围内使用。这可以防止大型项目中的类、方法、函数和变量之间发生命名冲突。命名空间将开发人员编写的代码组织…...

drools规则引擎 规则配置文件drl语法使用案例
前提:环境搭建,参考博文springboot整合drools规则引擎 示例入门-CSDN博客案例1,商城系统消费赠送积分 100元以下, 不加分 100元-500元 加100分 500元-1000元 加500分 1000元 以上 加1000分订单pojo编写 package cn.beijing.model;import lom…...

C++编程:高性能通信组件Capnproto与Protobuf的对比分析
文章目录 0. 概要1. 测试环境2. 测试方法3. 测试结果及分析3.1 延迟测试3.2 吞吐量测试3.3 稳定性测试3.4 一对二测试记录3.5 二对一测试记录3.6 Inter-process 单个点开销分析 4. CapnProto 与 Protobuf 的对比测试总结 0. 概要 本文主要探讨了两种高性能通信组件:…...

【Python读书数据,并计算数据的相关系数、方差,均方根误差】
为了处理Python中的读书数据(假设这里指的是一系列关于书籍阅读量或评分的数据),并计算这些数据的相关系数、方差以及均方根误差(RMSE),我们首先需要明确数据的结构。这里,我将假设我们有一组关…...

垃圾收集器G1ZGC详解
G1收集器(-XX:UseG1GC) G1 (Garbage-First)是一款面向服务器的垃圾收集器,主要针对配备多颗处理器及大容量内存的机器. 以极高概率满足GC停顿时间要求的同时,还具备高吞吐量性能特征. G1将Java堆划分为多个大小相等的独立区域(Region),JVM目…...

AI芯片:高性能卷积计算中的数据复用
随着深度学习的飞速发展,对处理器的性能要求也变得越来越高,随之涌现出了很多针对神经网络加速设计的AI芯片。卷积计算是神经网络中最重要的一类计算,本文分析了高性能卷积计算中的数据复用,这是AI芯片设计中需要优化的重点之一&a…...

gitlab修改默认访问端口
GitLab 自带了一个 Nginx 服务器实例,用于处理 HTTP 和 HTTPS 请求。这个内置的 Nginx 服务器被配置为与 GitLab 应用程序实例一起工作,并且它负责处理所有前端的网络通信。 通过yum或者apt安装Gitlab时,nginx通常是被自带安装并配置好的。 …...

python——异常
Python 中的异常及继承关系 在 Python 中,异常用于表示程序在运行过程中遇到的错误,所有异常类最终都继承自 BaseException。通过异常处理,我们可以捕获和处理这些错误,避免程序崩溃。 Python 异常继承关系图 BaseException-- …...

【人工智能】利用TensorFlow.js在浏览器中实现一个基本的情感分析系统
使用TensorFlow.js在浏览器中进行情感分析是一个非常实用的应用场景。TensorFlow.js 是一个用于在JavaScript环境中训练和部署机器学习模型的库,使得开发者能够在客户端直接运行复杂的机器学习任务。对于情感分析,我们可以使用预先训练好的模型来识别文本…...

Python——扩展数据类型
Python 的扩展数据类型是对内置数据类型的增强,旨在解决特定需求,提供更高级的功能。我们来看一些常见的扩展数据类型及其原理、用途,并通过示例逐步讲解。 1. collections.namedtuple namedtuple 是增强的元组,允许用名称访问元…...

Qt Http Server模块功能及架构
Qt Http Server 是 Qt 6.0 中引入的一个新模块,它提供了一个轻量级的 HTTP 服务器实现,主要用于构建基于 HTTP 的应用程序和服务。 功能介绍: 主要功能 HTTP服务器功能: 支持 HTTP/1.1 协议 简单的请求/响应处理模型 支持 GET…...

【git】把本地更改提交远程新分支feature_g
创建并切换新分支 git checkout -b feature_g 添加并提交更改 git add . git commit -m “实现图片上传功能” 推送到远程 git push -u origin feature_g...

c#开发AI模型对话
AI模型 前面已经介绍了一般AI模型本地部署,直接调用现成的模型数据。这里主要讲述讲接口集成到我们自己的程序中使用方式。 微软提供了ML.NET来开发和使用AI模型,但是目前国内可能使用不多,至少实践例子很少看见。开发训练模型就不介绍了&am…...

C++八股 —— 单例模式
文章目录 1. 基本概念2. 设计要点3. 实现方式4. 详解懒汉模式 1. 基本概念 线程安全(Thread Safety) 线程安全是指在多线程环境下,某个函数、类或代码片段能够被多个线程同时调用时,仍能保证数据的一致性和逻辑的正确性…...

鸿蒙DevEco Studio HarmonyOS 5跑酷小游戏实现指南
1. 项目概述 本跑酷小游戏基于鸿蒙HarmonyOS 5开发,使用DevEco Studio作为开发工具,采用Java语言实现,包含角色控制、障碍物生成和分数计算系统。 2. 项目结构 /src/main/java/com/example/runner/├── MainAbilitySlice.java // 主界…...

IP如何挑?2025年海外专线IP如何购买?
你花了时间和预算买了IP,结果IP质量不佳,项目效率低下不说,还可能带来莫名的网络问题,是不是太闹心了?尤其是在面对海外专线IP时,到底怎么才能买到适合自己的呢?所以,挑IP绝对是个技…...
提供了哪些便利?)
现有的 Redis 分布式锁库(如 Redisson)提供了哪些便利?
现有的 Redis 分布式锁库(如 Redisson)相比于开发者自己基于 Redis 命令(如 SETNX, EXPIRE, DEL)手动实现分布式锁,提供了巨大的便利性和健壮性。主要体现在以下几个方面: 原子性保证 (Atomicity)ÿ…...

人工智能--安全大模型训练计划:基于Fine-tuning + LLM Agent
安全大模型训练计划:基于Fine-tuning LLM Agent 1. 构建高质量安全数据集 目标:为安全大模型创建高质量、去偏、符合伦理的训练数据集,涵盖安全相关任务(如有害内容检测、隐私保护、道德推理等)。 1.1 数据收集 描…...

Sklearn 机器学习 缺失值处理 获取填充失值的统计值
💖亲爱的技术爱好者们,热烈欢迎来到 Kant2048 的博客!我是 Thomas Kant,很开心能在CSDN上与你们相遇~💖 本博客的精华专栏: 【自动化测试】 【测试经验】 【人工智能】 【Python】 使用 Scikit-learn 处理缺失值并提取填充统计信息的完整指南 在机器学习项目中,数据清…...
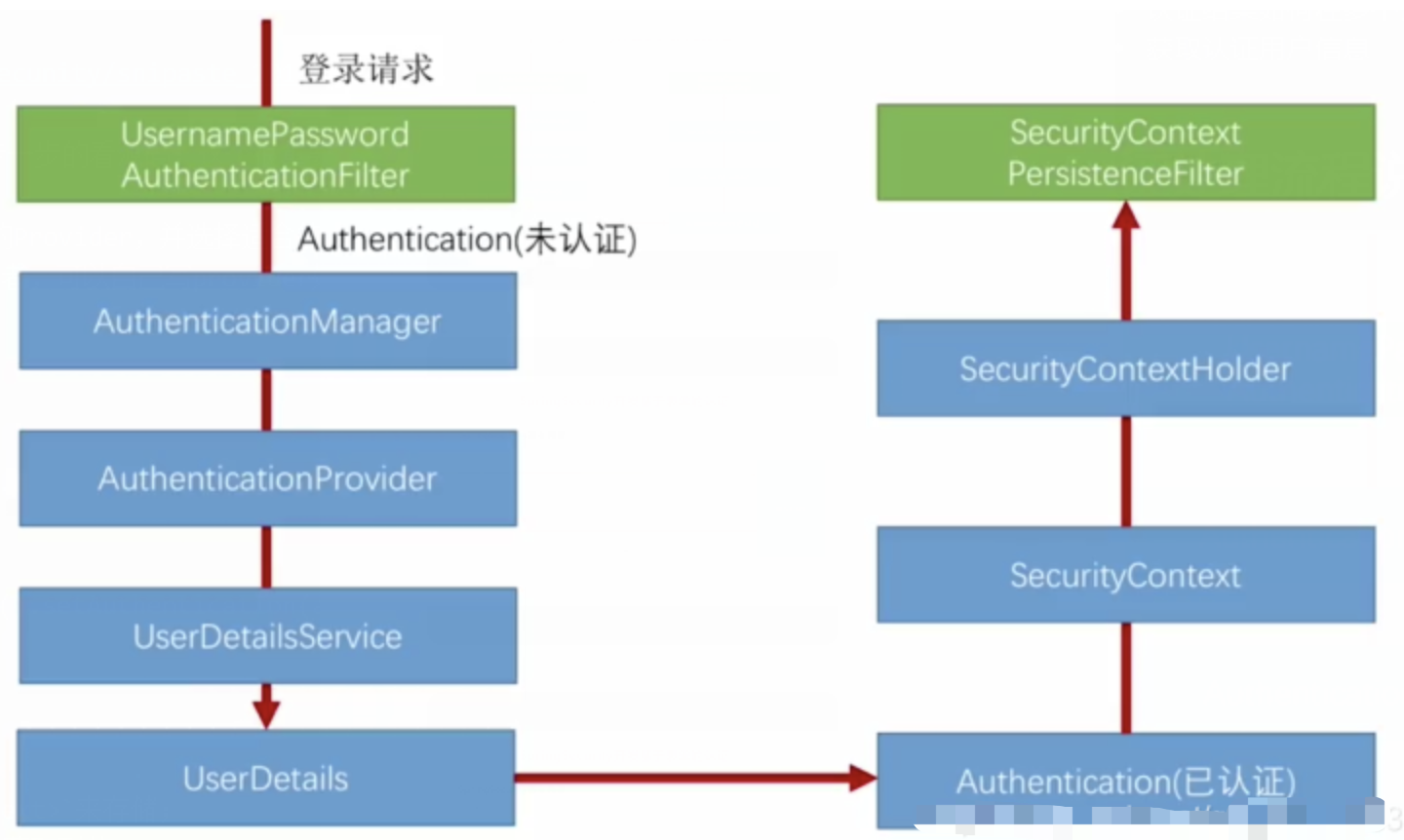
spring Security对RBAC及其ABAC的支持使用
RBAC (基于角色的访问控制) RBAC (Role-Based Access Control) 是 Spring Security 中最常用的权限模型,它将权限分配给角色,再将角色分配给用户。 RBAC 核心实现 1. 数据库设计 users roles permissions ------- ------…...