I.MX6ULL内核开发9:kobject-驱动的基石
目录
一、摘要
二、重点
三、驱动结构模型
四、关键函数分析
kobject_create_and_add()函数
kobject_create()函数
kobject_init()函数
kobject_init_internal()函数
kobject_add()函数
kobject_add_varg()函数
kobject_set_name_vargs()函数
kobject_add_internal()函数
create_dir()函数
sysfs_create_dir_ns()函数
一、摘要
- 构建一个kobject对象
- 构建一个sysfs中的目录项(kernfs_node)
- 把他们关联起来
二、重点
- 关注sysfs目录项与kobject对象的关联过程
- 关注kobject对象默认的属性文件接口
三、驱动结构模型
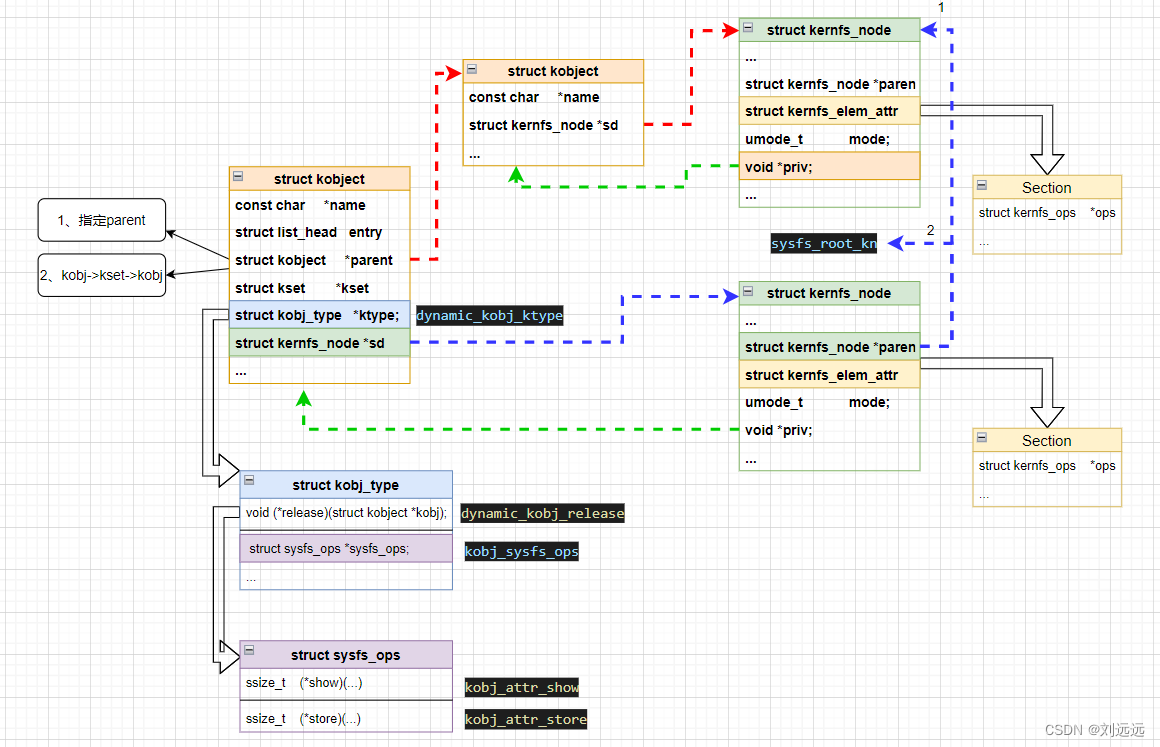
四、关键函数分析
kobject_create_and_add()函数
/home/geralt/linux_driver/kernel/ebf_linux_kernel_6ull_depth1/lib/kobject.c
struct kobject *kobject_create_and_add(const char *name, struct kobject *parent)
{struct kobject *kobj;int retval;// 创建并初始化kobj = kobject_create();if (!kobj)return NULL;// sysfs创建一个目录项并与kobject对象关联retval = kobject_add(kobj, parent, "%s", name);if (retval) {pr_warn("%s: kobject_add error: %d\n", __func__, retval);kobject_put(kobj);kobj = NULL;}return kobj;
}kobject_create()函数
/home/geralt/linux_driver/kernel/ebf_linux_kernel_6ull_depth1/lib/kobject.c
struct kobject *kobject_create(void)
{struct kobject *kobj;// 动态申请内存,存放kobject对象kobj = kzalloc(sizeof(*kobj), GFP_KERNEL);if (!kobj)return NULL;kobject_init(kobj, &dynamic_kobj_ktype);return kobj;
}static struct kobj_type dynamic_kobj_ktype = {.release = dynamic_kobj_release,.sysfs_ops = &kobj_sysfs_ops,
};const struct sysfs_ops kobj_sysfs_ops = {.show = kobj_attr_show,.store = kobj_attr_store,
};kobject_init()函数
/home/geralt/linux_driver/kernel/ebf_linux_kernel_6ull_depth1/lib/kobject.c
void kobject_init(struct kobject *kobj, struct kobj_type *ktype)
{char *err_str;if (!kobj) {err_str = "invalid kobject pointer!";goto error;}if (!ktype) {err_str = "must have a ktype to be initialized properly!\n";goto error;}if (kobj->state_initialized) {/* do not error out as sometimes we can recover */pr_err("kobject (%p): tried to init an initialized object, something is seriously wrong.\n",kobj);dump_stack();}kobject_init_internal(kobj);kobj->ktype = ktype;return;error:pr_err("kobject (%p): %s\n", kobj, err_str);dump_stack();
}kobject_init_internal()函数
home/geralt/linux_driver/kernel/ebf_linux_kernel_6ull_depth1/lib/kobject.c
static void kobject_init_internal(struct kobject *kobj)
{if (!kobj)return;// 将kobject的引用计数设置为1kref_init(&kobj->kref);// 初始化链表节点INIT_LIST_HEAD(&kobj->entry);// 该kobject对象还没和sysfs目录项关联kobj->state_in_sysfs = 0;kobj->state_add_uevent_sent = 0;kobj->state_remove_uevent_sent = 0;// kobject对象的初始化标志kobj->state_initialized = 1;
}kobject_add()函数
home/geralt/linux_driver/kernel/ebf_linux_kernel_6ull_depth1/lib/kobject.c
int kobject_add(struct kobject *kobj, struct kobject *parent,const char *fmt, ...)
{va_list args;int retval;if (!kobj)return -EINVAL;if (!kobj->state_initialized) {pr_err("kobject '%s' (%p): tried to add an uninitialized object, something is seriously wrong.\n",kobject_name(kobj), kobj);dump_stack();return -EINVAL;}// 获取第一个可变参数,可变参数函数的实现与函数传参的栈结构有关va_start(args, fmt);retval = kobject_add_varg(kobj, parent, fmt, args);va_end(args);return retval;
}kobject_add_varg()函数
home/geralt/linux_driver/kernel/ebf_linux_kernel_6ull_depth1/lib/kobject.c
static __printf(3, 0) int kobject_add_varg(struct kobject *kobj,struct kobject *parent,const char *fmt, va_list vargs)
{int retval;retval = kobject_set_name_vargs(kobj, fmt, vargs);if (retval) {pr_err("kobject: can not set name properly!\n");return retval;}// 第一次设置的kobj的parent指针kobj->parent = parent;return kobject_add_internal(kobj);
}kobject_set_name_vargs()函数
int kobject_set_name_vargs(struct kobject *kobj, const char *fmt,va_list vargs)`
{const char *s;if (kobj->name && !fmt)return 0;// 参数格式化打印到s字符串中s = kvasprintf_const(GFP_KERNEL, fmt, vargs);if (!s)return -ENOMEM;/** ewww... some of these buggers have '/' in the name ... If* that's the case, we need to make sure we have an actual* allocated copy to modify, since kvasprintf_const may have* returned something from .rodata.*/if (strchr(s, '/')) {char *t;t = kstrdup(s, GFP_KERNEL);kfree_const(s);if (!t)return -ENOMEM;strreplace(t, '/', '!');s = t;}kfree_const(kobj->name);// 设置kobject对象的名称kobj->name = s;return 0;
}kobject_add_internal()函数
static int kobject_add_internal(struct kobject *kobj)
{int error = 0;struct kobject *parent;if (!kobj)return -ENOENT;if (!kobj->name || !kobj->name[0]) {WARN(1,"kobject: (%p): attempted to be registered with empty name!\n",kobj);return -EINVAL;}parent = kobject_get(kobj->parent);/* join kset if set, use it as parent if we do not already have one */if (kobj->kset) {if (!parent)parent = kobject_get(&kobj->kset->kobj);kobj_kset_join(kobj);kobj->parent = parent;}pr_debug("kobject: '%s' (%p): %s: parent: '%s', set: '%s'\n",kobject_name(kobj), kobj, __func__,parent ? kobject_name(parent) : "<NULL>",kobj->kset ? kobject_name(&kobj->kset->kobj) : "<NULL>");error = create_dir(kobj);if (error) {kobj_kset_leave(kobj);kobject_put(parent);kobj->parent = NULL;/* be noisy on error issues */if (error == -EEXIST)pr_err("%s failed for %s with -EEXIST, don't try to register things with the same name in the same directory.\n",__func__, kobject_name(kobj));elsepr_err("%s failed for %s (error: %d parent: %s)\n",__func__, kobject_name(kobj), error,parent ? kobject_name(parent) : "'none'");} elsekobj->state_in_sysfs = 1;return error;
}create_dir()函数
static int create_dir(struct kobject *kobj)
{const struct kobj_ns_type_operations *ops;int error;error = sysfs_create_dir_ns(kobj, kobject_namespace(kobj));if (error)return error;error = populate_dir(kobj);if (error) {sysfs_remove_dir(kobj);return error;}/** @kobj->sd may be deleted by an ancestor going away. Hold an* extra reference so that it stays until @kobj is gone.*/sysfs_get(kobj->sd);/** If @kobj has ns_ops, its children need to be filtered based on* their namespace tags. Enable namespace support on @kobj->sd.*/ops = kobj_child_ns_ops(kobj);if (ops) {BUG_ON(ops->type <= KOBJ_NS_TYPE_NONE);BUG_ON(ops->type >= KOBJ_NS_TYPES);BUG_ON(!kobj_ns_type_registered(ops->type));sysfs_enable_ns(kobj->sd);}return 0;
}sysfs_create_dir_ns()函数
文件:/home/geralt/linux_driver/kernel/ebf_linux_kernel_6ull_depth1/fs/sysfs
int sysfs_create_dir_ns(struct kobject *kobj, const void *ns)
{struct kernfs_node *parent, *kn;kuid_t uid;kgid_t gid;BUG_ON(!kobj);if (kobj->parent)// 获取上一层节点的目录项parent = kobj->parent->sd;else// 设置上一层节点的目录项sysfsparent = sysfs_root_kn;if (!parent)return -ENOENT;kobject_get_ownership(kobj, &uid, &gid);kn = kernfs_create_dir_ns(parent, kobject_name(kobj),S_IRWXU | S_IRUGO | S_IXUGO, uid, gid,kobj, ns);if (IS_ERR(kn)) {if (PTR_ERR(kn) == -EEXIST)sysfs_warn_dup(parent, kobject_name(kobj));return PTR_ERR(kn);}// kobj对象关联sysfs目录项kobj->sd = kn;return 0;
}相关文章:
I.MX6ULL内核开发9:kobject-驱动的基石
目录 一、摘要 二、重点 三、驱动结构模型 四、关键函数分析 kobject_create_and_add()函数 kobject_create()函数 kobject_init()函数 kobject_init_internal()函数 kobject_add()函数 kobject_add_varg&am…...

Docker-harbor私有仓库
一、Harbor概述 1、Harbor的概念 • Harbor是VMware公司开源的企业级Docker Registry项目,其目标是帮助用户迅速搭建一个企业级的Docker Registry服务 • Harbor以 Docker 公司开源的Registry 为基础,提供了图形管理UI、基于角色的访问控制(Role Base…...
Java之动态规划之子序列问题
目录 0.动态规划问题 一.最长递增子序列 1.题目描述 2.问题分析 3.代码实现 二.最长递增子序列 1.题目描述 2.问题分析 3.代码实现 三.最长重复子数组 1.题目描述 2.问题分析 3.代码实现 4.代码的优化(滚动数组) 四.最长公共子序列 1.题目描述 2.问题分析 3.代…...

java ArrayList
目录 一.简单介绍 二.ArrayList的底层结构 2.1ArrayList的底层结构和操作分析 2.ArrayList 底层源码分析 三.ArrayList 方法 四.代码使用方法 一.简单介绍 ArrayList 类是一个可以动态修改的数组,与普通数组的区别就是它是没有固定大小的限制,我们…...

前端——周总结系列四
1 JS变量与常量 概述 变量:在后续编码过程中会被重新赋值,是不断变化的。常量:固定不变的数据,日常生活比如性别男,代码层面是在编码过程中不会变化的固定数据。 命名规则 变量 可以包含数字,字母&…...
Linux重定向符、管道符讲解
目录 重定向 将命令与文件进行互动 输出重定向 输入重定向 管道符 将命令与命令互动起来 重定向 将命令与文件进行互动 重定向分类 一般情况下,Linux命令运行时都会打开一下三个文件 标准输入文件:stdin文件,文件描述符为0,Li…...
【C++】多态
多态一、多态的概念及定义1.1 虚函数1.2 虚函数重写的特殊情况1.3 override 和 final二、抽象类2.1 概念2.2 用处三、多态的原理3.1 虚函数表3.1.1 虚函数与虚表的位置3.2 多态的原理3.3 静态绑定和动态绑定四、单/多继承的虚函数表4.1 单继承的虚函数表4.2 多继承的虚函数表一…...

分布式项目-品牌管理(5、6)
【今日成果】: //使用阿里云OSS服务: //使用v-if如果地址没有就不显示 , 如果地址错误图片就显示不出来; 【快速回顾】: 任何数据的删除都不要使用物理上的删除,应当使用逻辑上的删除!&…...
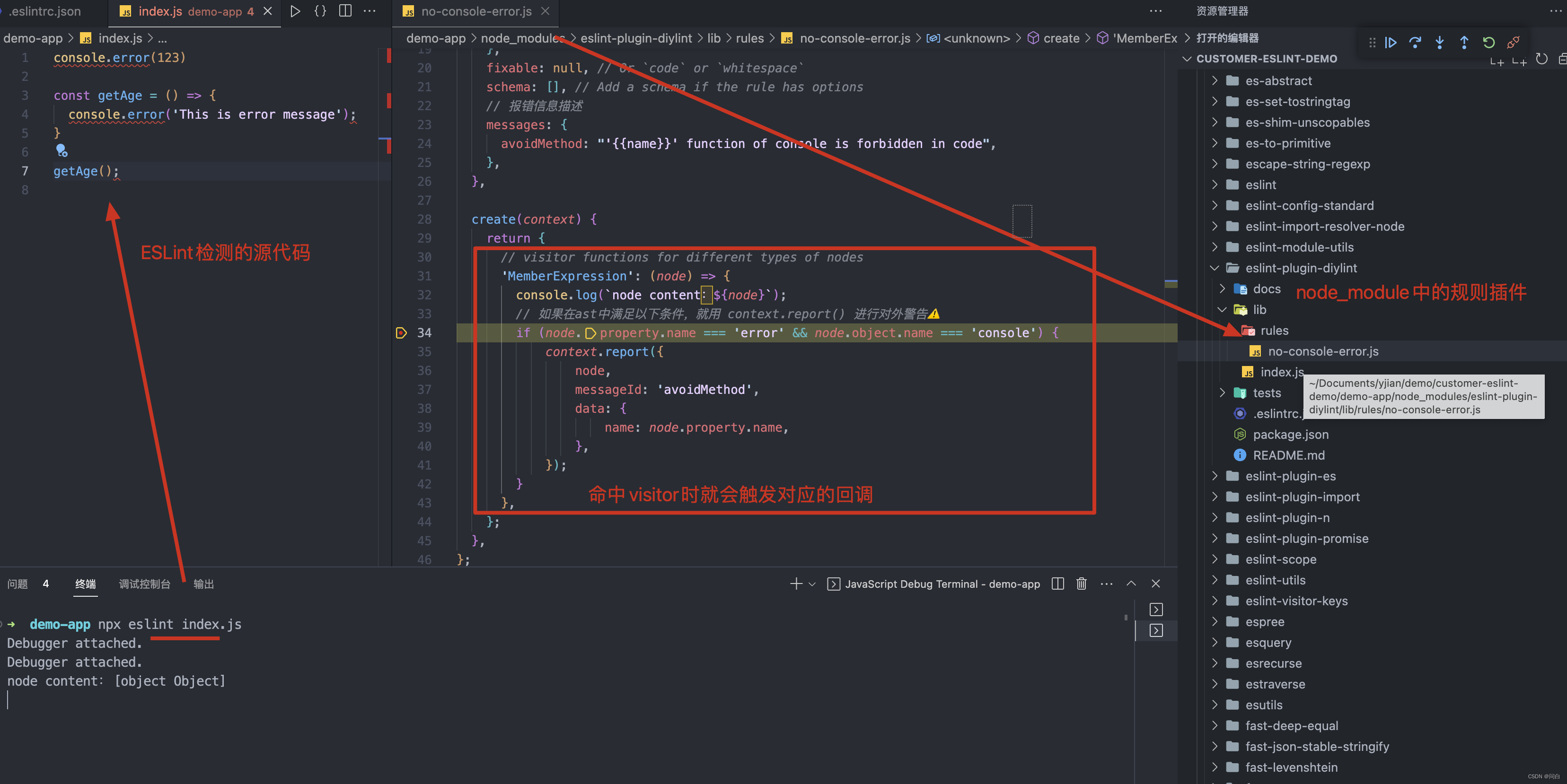
自定义ESLint规则开发与使用
自定义eslint及使用 项目结构 |-eslint-plugin-demo //自定义eslint插件项目 | |-demo-app // 使用自定义eslint的测试应用 |-README.md 项目效果: github项目地址 自定义ESLint环境准备 安装脚手架 执行下列命令来安装开发eslint的脚手架。 yo(y…...

【JavaScript】35_包装类与垃圾回收机制
10、包装类 在JS中,除了直接创建原始值外,也可以创建原始值的对象 通过 new String() 可以创建String类型的对象 通过 new Number() 可以创建Number类型的对象 通过 new Boolean() 可以创建Boolean类型的对象 但是千万不要这么做 包装类࿱…...

【CS224W】(task3)NetworkX工具包实践
note 节点可以为任意可哈希的对象,比如字符串、图像、XML对象,甚至另一个Graph、自定义的节点对象。通过这种方式可以自由灵活地构建:图为节点、文件为节点、函数为节点,等灵活的图形式。暂时省略:【B5】计算机网络图…...
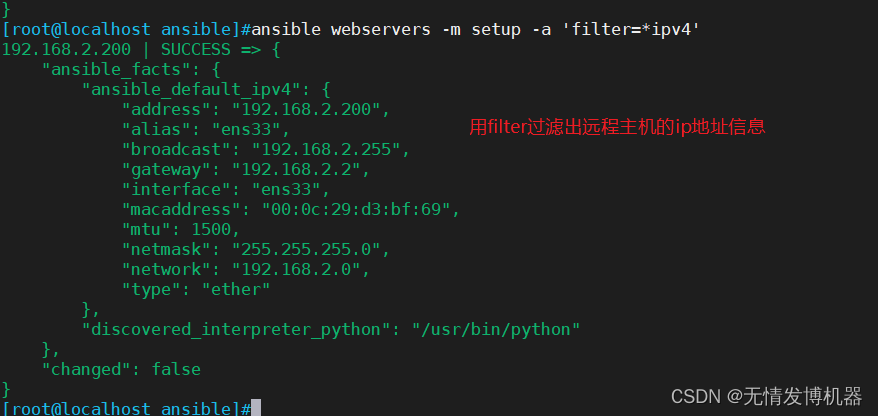
ansible的模块详解
ansible 的概述 什么是ansible Ansible是一款为类Unix系统开发的自由开源的配置和自动化工具。 它用Python写成,类似于saltstack和Puppet,但是有一个不同和优点是我们不需要在节点中安装任何客户端。 它使用SSH来和节点进行通信。Ansible基于 Python…...

《Terraform 101 从入门到实践》 Functions函数
《Terraform 101 从入门到实践》这本小册在南瓜慢说官方网站和GitHub两个地方同步更新,书中的示例代码也是放在GitHub上,方便大家参考查看。 Terraform的函数 Terraform为了让大家在表达式上可以更加灵活方便地进行计算,提供了大量的内置函数…...

使用kubeadm快速部署一个K8s集群
wkubeadm是官方社区推出的一个用于快速部署kubernetes集群的工具。 这个工具能通过两条指令完成一个kubernetes集群的部署: # 创建一个 Master 节点 $ kubeadm init# 将一个 Node 节点加入到当前集群中 $ kubeadm join <Master节点的IP和端口 >1. 安装要求 …...

初探富文本之CRDT协同算法
初探富文本之CRDT协同算法 CRDT的英文全称是Conflict-free Replicated Data Type,最初是由协同文本编辑和移动计算而发展的,现在还被用作在线聊天系统、音频分发平台等等。当前CRDT算法在富文本编辑器领域的协同依旧是典型的场景,常用于作为…...
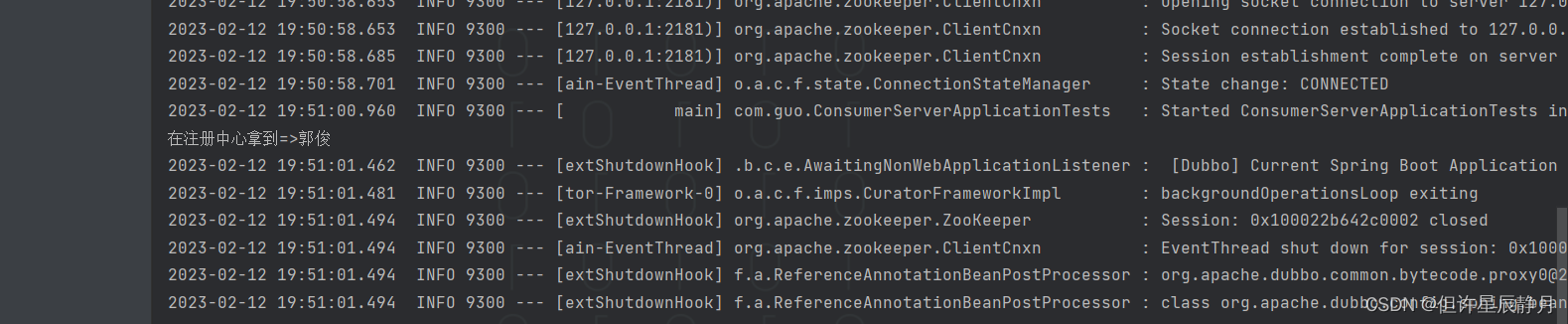
Dubbo和Zookeeper集成分布式系统快速入门
文件结构 代码部分 1、新建provider-server导入pom依赖 <dependency><groupId>org.apache.dubbo</groupId><artifactId>dubbo-spring-boot-starter</artifactId><version>2.7.3</version></dependency><dependency>&l…...
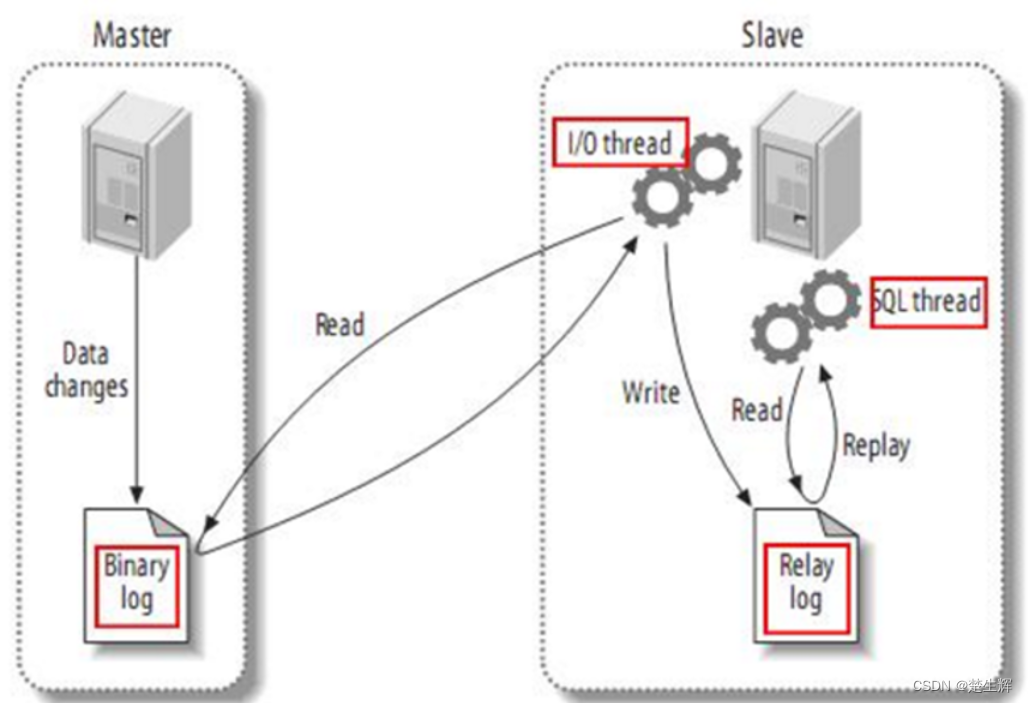
大数据工具Maxwell的使用
1.Maxwell简介 Maxwell 是由美国Zendesk公司开源,用Java编写的MySQL变更数据抓取软件。它会实时监控Mysql数据库的数据变更操作(包括insert、update、delete),并将变更数据以 JSON 格式发送给 Kafka、Kinesi等流数据处理平台。 官…...

freesurfer如何将组模板投影到个体空间——如投影 Schaefer2018 到个体空间
freesurfer如何将组模板投影到个体空间——如投影 Schaefer2018 到个体空间 freesurfer如何将组模板投影到个体空间? freesurfer如何将组模板投影到个体空间——如投影 Schaefer2018 到个体空间freesurfer的整理流程freesurfer的安装freesurfer对结构像分割流程及批处理代码fr…...
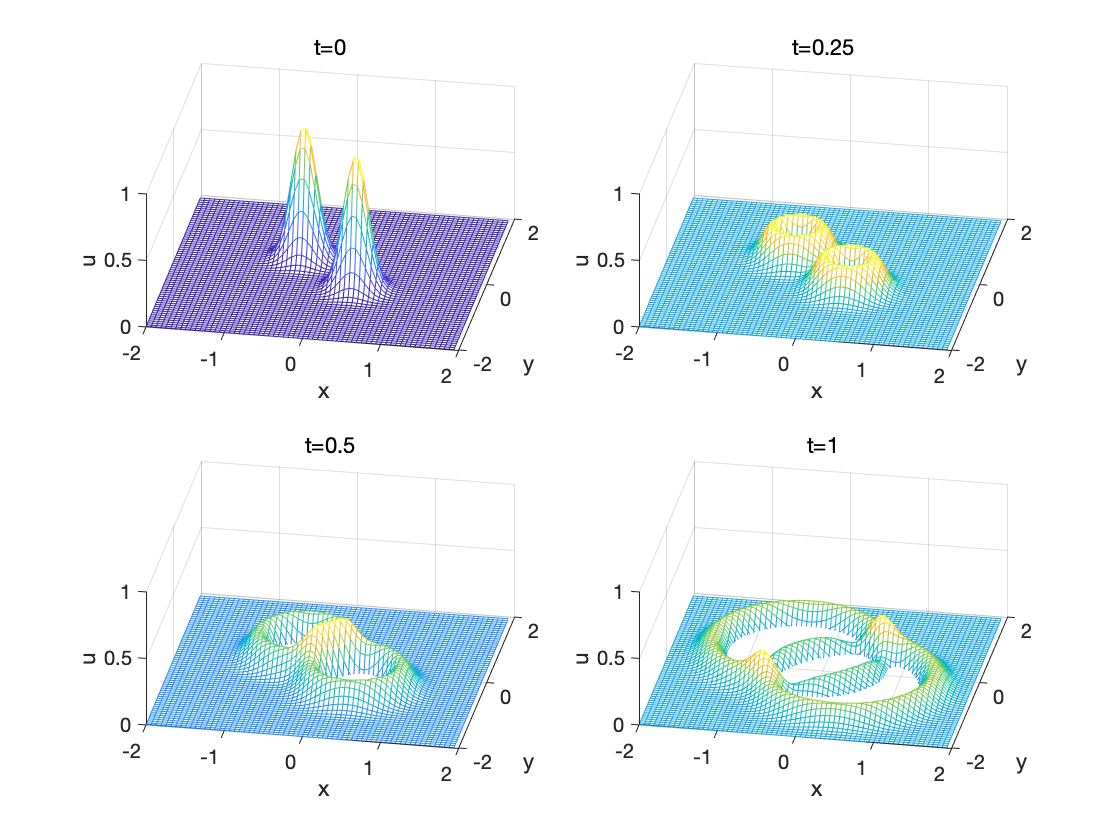
Matlab傅里叶谱方法求解二维波动方程
傅里叶谱方法求解基本偏微分方程—二维波动方程 二维波动方程 将一维波动方程中的一维无界弦自由振动方程推广到二维空间上, 就得到了描述无界 (−∞<x,y<∞)(-\infty<x, y<\infty)(−∞<x,y<∞) 弹性薄膜的波动方程: ∂2u∂t2a2(∂2∂x2∂2∂y2)u(1)\frac…...
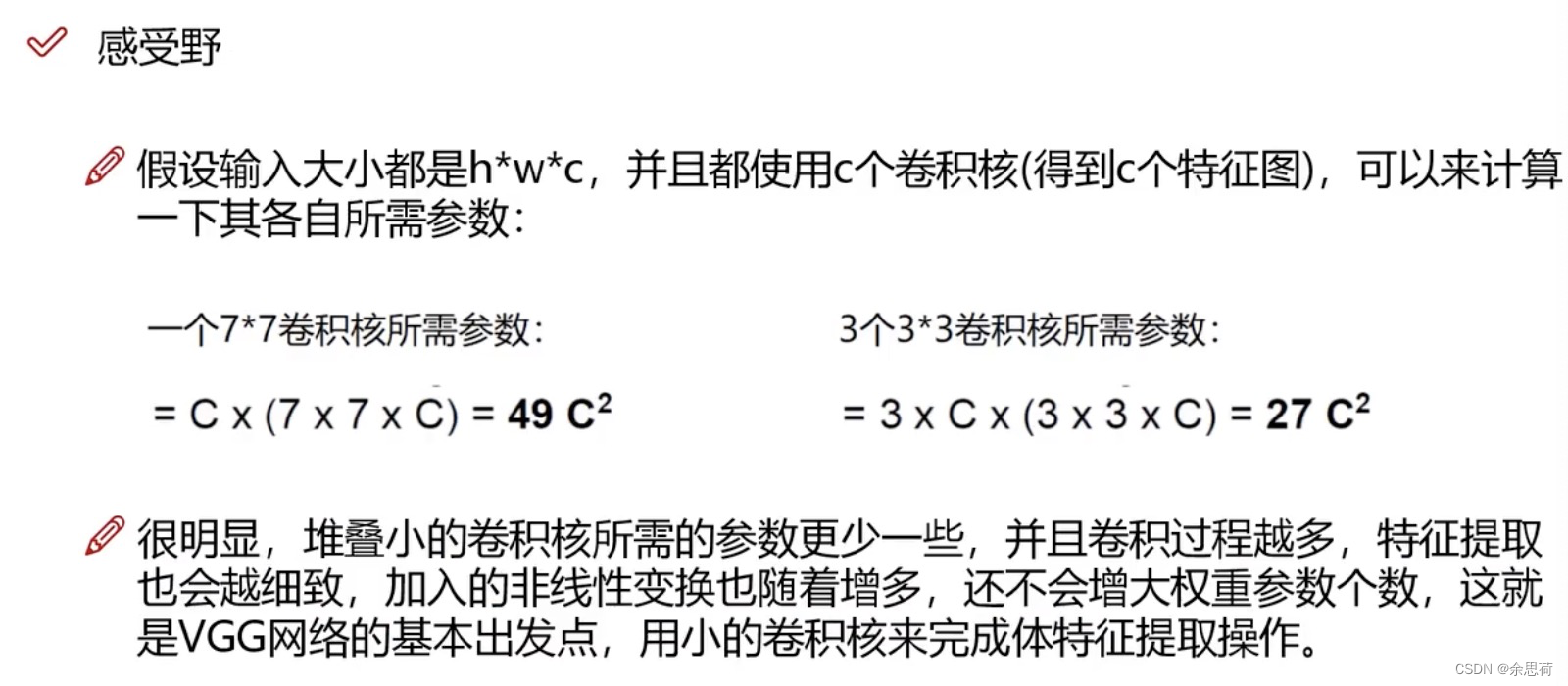
【深度学习】卷积神经网络
1 卷积神经网络(CNN)可以做什么? 检测任务分类与检索超分辨率重构:将图像训练的更清晰医学任务等无人驾驶人脸识别 2 用GPU:图像处理单元 比CPU块一百倍以上 3 卷积神经网络与传统神经网络的区别 传统神经网络&…...

建筑项目进度延误率下降37%的秘密:一个轻量化AI Agent工作流,已在12个EPC项目中闭环验证
更多请点击: https://codechina.net 第一章:建筑项目进度延误率下降37%的秘密:一个轻量化AI Agent工作流,已在12个EPC项目中闭环验证 在某头部工程总承包(EPC)企业落地的轻量化AI Agent工作流,…...

五八同城登录接口逆向:RSA加密、动态salt与sign验签实战
1. 这不是“爬个登录”那么简单:五八同城登录接口逆向的真实战场你点开浏览器开发者工具,F12,Network 面板里筛选 XHR,找到那个/login请求,点开看 Headers 和 Payload —— 然后傻眼了:password字段是一串 …...
)
【MATLAB】工业控制参数多目标优化(GA/PSO)
【MATLAB】工业控制参数多目标优化(GA/PSO) 一、引言 工业控制系统的控制参数直接决定系统动态响应、稳态精度、抗干扰能力与运行稳定性,PID控制器、伺服调节器、过程闭环控制器等核心单元的参数整定是工业自动化领域的关键技术环节。传统人工试凑法、Z-N临界比例度法等参…...

智慧医院边缘计算架构:QoS驱动的低延迟医疗物联网实践
1. 项目概述:当智慧医院遇上边缘计算在智慧医院的日常运营中,我们正面临一个日益尖锐的矛盾:一边是海量医疗物联网设备产生的实时数据洪流,另一边是云端数据中心在处理这些数据时难以逾越的延迟与带宽瓶颈。想象一下,一…...

统计学习理论:从VC维到泛化误差,构建稳健CV系统的数学基石
1. 项目概述:从“炼丹”到“建楼”的范式转变在计算机视觉和机器学习这个圈子里混了十几年,我见过太多“炼丹”的场景了。大家热衷于调参、换模型、堆数据,一个模型效果好,大家就一拥而上,但很少有人能说清楚它为什么好…...

Frida hook so层解析protobuf二进制数据实战指南
1. 这不是“hook个so那么简单”:为什么 protobuf 数据成了 Frida 调试里最隐蔽的拦路虎你有没有遇到过这种情况:用 Frida 成功 hook 到某个 so 库里的关键函数,log 打得满屏飞,参数地址、返回值、调用栈一应俱全——可当你兴冲冲地…...

从需求到交付:深度拆解企业级软件定制开发的标准化流程
一、 引言:数字化转型的“标准化”与“定制化”博弈(内容概要:简述当前企业在选购通用SaaS软件与定制软件时的痛点。指出通用软件往往“大而全但难用”,而定制开发的核心在于精准契合业务场景。)二、 定制开发的四大核…...

虚幻引擎Pak文件可视化分析工具原理与实践
1. 为什么一个Pak文件查看器值得花两周重写三遍?虚幻引擎项目打包后生成的.pak文件,对绝大多数开发者来说就是个“黑盒”——你清楚它装着所有资源:贴图、音频、蓝图、关卡数据,甚至UAsset序列化后的二进制结构;但你完…...

AI系列【仅供参考】:周末用笔记本搞点大事:手把手教学部署 1.5、7B 版本 DeepSeek 智能助手
周末用笔记本搞点大事:手把手教学部署 1.5、7B 版本 DeepSeek 智能助手周末用笔记本搞点大事:手把手教学部署 1.5、7B 版本 DeepSeek 智能助手一、工具介绍1.1 DeepSeek1.2 Ollama二、准备工作2.1 系统要求2.2 下载 Ollama 安装包三、Ollama 的安装与验证…...

Harness的配置漂移检测与自动修复
云原生时代的稳定性利器:Harness配置漂移检测与自动修复全指南 引言 痛点引入 相信每一位DevOps工程师、SRE或者运维负责人都遇到过这样的噩梦: 测试环境验证了3天的功能,上线到生产10分钟就出现503错误,排查了2小时才发现&…...