【自动驾驶】ROS中参数服务器通信(c++)
目录
- 通信过程
- 新建参数服务器包
- 编写测试文件
- 修改cmakelist:
- 搭配launch文件
- 启动测试及结果
通信过程
1.Talker 设置参数
Talker 通过 RPC 向参数服务器发送参数(包括参数名与参数值),ROS Master 将参数保存到参数列表中。
2.Listener 获取参数
Listener 通过 RPC 向参数服务器发送参数查找请求,请求中包含要查找的参数名。
3.ROS Master 向 Listener 发送参数值
ROS Master 根据步骤2请求提供的参数名查找参数值,并将查询结果通过 RPC 发送给 Listener。
参数可使用数据类型:
32-bit integersbooleansstringsdoublesiso8601 dateslistsbase64-encoded binary data
新建参数服务器包
catkin_create_pkg paramservice std_msgs rospy roscpp
编写测试文件
#include "ros/ros.h"
#include <vector>
#include <map>
int main(int argc, char *argv[])
{//使得中文可以生效setlocale(LC_ALL,"");ros::init(argc,argv,"set_update_param");std::vector<std::string> stus;stus.push_back("这是元素1");stus.push_back("这是元素2");std::map<std::string,std::string> friends;friends["key"] = "value";ros::param::set("param_int",20);ros::param::set("param_double",3.14);ros::param::set("param_string","Hello Param");ros::param::set("param_bool",false);ros::param::set("param_vector",stus);ros::param::set("param_map",friends);//修改演示(相同的键,不同的值)ros::param::set("param_int",20000);// getParam 函数int param_int_value;double param_double_value;bool param_bool_value;std::string param_string_value;std::vector<std::string> param_stus;std::map<std::string, std::string> param_friends;ros::param::get("param_int",param_int_value);ros::param::get("param_double",param_double_value);ros::param::get("param_bool",param_bool_value);ros::param::get("param_string",param_string_value);ros::param::get("param_vector",param_stus);ros::param::get("param_map",param_friends);ROS_INFO("getParam获取的结果:%d,%.2f,%s,%d",param_int_value,param_double_value,param_string_value.c_str(),param_bool_value);for (auto &&stu : param_stus){ROS_INFO("stus 元素:%s",stu.c_str()); }for (auto &&f : param_friends){ROS_INFO("map 元素:%s = %s",f.first.c_str(), f.second.c_str());}// 首次调用getCached,这里会订阅参数值,通过缓存获取数据,当数据变化时,将通知节点自动更新ros::param::getCached("param_int",param_int_value);ROS_INFO("通过缓存获取数据:%d",param_int_value);//输出所有的变量名std::vector<std::string> param_names2;ros::param::getParamNames(param_names2);for (auto &&name : param_names2){ROS_INFO("名称解析name = %s",name.c_str()); }ROS_INFO("----------------------------");ROS_INFO("存在 param_int 吗? %d",ros::param::has("param_int"));ROS_INFO("存在 param_intttt 吗? %d",ros::param::has("param_intttt"));std::string key;ros::param::search("param_int",key);ROS_INFO("搜索键:%s",key.c_str());//删除相关的参数bool r2 = ros::param::del("param_int");ROS_INFO("param 删除结果:%d",r2);return 0;}
修改cmakelist:
add_executable(${PROJECT_NAME}_node src/paramservice.cpp)
target_link_libraries(${PROJECT_NAME}_node${catkin_LIBRARIES}
)
搭配launch文件
<launch><node name="myservice" pkg="service" type="service_node" output="screen"/>
</launch>
启动测试及结果
roslaunch paramservice start.launch
[ INFO] [1723529188.541091451]: getParam获取的结果:20000,3.14,Hello Param,0
[ INFO] [1723529188.541155371]: stus 元素:这是元素1
[ INFO] [1723529188.541178505]: stus 元素:这是元素2
[ INFO] [1723529188.541192963]: map 元素:key = value
[ INFO] [1723529188.542024132]: 通过缓存获取数据:20000
[ INFO] [1723529188.542419343]: 名称解析name = /run_id
[ INFO] [1723529188.542439561]: 名称解析name = /roslaunch/uris/host_yisu_64fc150f8284e__34167
[ INFO] [1723529188.542458326]: 名称解析name = /roslaunch/uris/host_yisu_64fc150f8284e__41769
[ INFO] [1723529188.542474146]: 名称解析name = /roslaunch/uris/host_yisu_64fc150f8284e__45931
[ INFO] [1723529188.542489685]: 名称解析name = /roslaunch/uris/host_yisu_64fc150f8284e__45545
[ INFO] [1723529188.542505965]: 名称解析name = /roslaunch/uris/host_yisu_64fc150f8284e__44877
[ INFO] [1723529188.542524019]: 名称解析name = /roslaunch/uris/host_yisu_64fc150f8284e__42835
[ INFO] [1723529188.542541943]: 名称解析name = /roslaunch/uris/host_yisu_64fc150f8284e__46297
[ INFO] [1723529188.542559517]: 名称解析name = /roslaunch/uris/host_yisu_64fc150f8284e__41351
[ INFO] [1723529188.542576629]: 名称解析name = /roslaunch/uris/host_yisu_64fc150f8284e__43881
[ INFO] [1723529188.542594843]: 名称解析name = /roslaunch/uris/host_yisu_64fc150f8284e__43899
[ INFO] [1723529188.542612596]: 名称解析name = /roslaunch/uris/host_yisu_64fc150f8284e__34115
[ INFO] [1723529188.542630069]: 名称解析name = /roslaunch/uris/host_yisu_64fc150f8284e__39145
[ INFO] [1723529188.542647101]: 名称解析name = /roslaunch/uris/host_yisu_64fc150f8284e__43455
[ INFO] [1723529188.542664524]: 名称解析name = /roslaunch/uris/host_yisu_64fc150f8284e__33051
[ INFO] [1723529188.542682467]: 名称解析name = /roslaunch/uris/host_yisu_64fc150f8284e__35169
[ INFO] [1723529188.542700181]: 名称解析name = /roslaunch/uris/host_yisu_64fc150f8284e__46493
[ INFO] [1723529188.542718104]: 名称解析name = /roslaunch/uris/host_yisu_64fc150f8284e__39659
[ INFO] [1723529188.542735557]: 名称解析name = /rosversion
[ INFO] [1723529188.542753210]: 名称解析name = /rosdistro
[ INFO] [1723529188.542771264]: 名称解析name = /param_double
[ INFO] [1723529188.542789378]: 名称解析name = /param_string
[ INFO] [1723529188.542806159]: 名称解析name = /param_bool
[ INFO] [1723529188.542823351]: 名称解析name = /param_vector
[ INFO] [1723529188.542840955]: 名称解析name = /param_map/key
[ INFO] [1723529188.542858317]: 名称解析name = /param_int
[ INFO] [1723529188.542878054]: ----------------------------
[ INFO] [1723529188.543220015]: 存在 param_int 吗? 1
[ INFO] [1723529188.543525068]: 存在 param_intttt 吗? 0
[ INFO] [1723529188.543831122]: 搜索键:/param_int
[ INFO] [1723529188.544247053]: param 删除结果:1
相关文章:
)
【自动驾驶】ROS中参数服务器通信(c++)
目录 通信过程新建参数服务器包编写测试文件修改cmakelist:搭配launch文件启动测试及结果 通信过程 1.Talker 设置参数 Talker 通过 RPC 向参数服务器发送参数(包括参数名与参数值),ROS Master 将参数保存到参数列表中。 2.Listener 获取参数 Listener 通过 RPC 向…...

零基础5分钟上手亚马逊云科技核心云开发知识 - 网络基础
简介: 欢迎来到小李哥全新亚马逊云科技AWS云计算知识学习系列,适用于任何无云计算或者亚马逊云科技技术背景的开发者,通过这篇文章大家零基础5分钟就能完全学会亚马逊云科技一个经典的服务开发架构方案。 我会每天介绍一个基于亚马逊云科技…...

Unity Recttransform操作
1、拉伸铺满 RectTransform rect GetComponent<RectTransform>();rect.anchorMin Vector2.zero;rect.anchorMax Vector2.one;rect.SetSizeWithCurrentAnchors(RectTransform.Axis.Horizontal, Screen.width);rect.SetSizeWithCurrentAnchors(RectTransform.Axis.Verti…...
MIT线性代数P5
置换矩阵 置换矩阵是行重新排列的单位矩阵。 置换矩阵用P表示, 性质: n阶置换矩阵共有n!个...
)
patroni+etcd开启SSL认证(三个节点证书一致 使用openssl命令)
瀚高数据库 目录 环境 文档用途 详细信息 环境 系统平台:Linux x86-64 Red Hat Enterprise Linux 7 版本:14 文档用途 本文主要介绍Patroni架构中如何开启etcd的ssl证书认证。 详细信息 一、前提说明 patroni版本:3.0.2 etcd版本&#x…...

Eureka入门指南:微服务注册与发现的基础概念
Eureka入门指南:微服务注册与发现的基础概念 引言 随着微服务架构的普及,微服务之间的高效通信和管理成为了开发和运维的核心挑战之一。为了解决服务发现和管理问题,Netflix推出了Eureka,一个功能强大的服务注册和发现工具。Eur…...

Linux:动态库和静态库
静态库与动态库 A:静态库(.a):程序在编译链接的时候把库的代码链接到可执行文件中。程序运行的时候将不再需要静态库。 B:动态库(.so):程序在运行的时候才去链接动态库的代码&#…...

8.13网络编程
笔记 多点通信 一、套接字属性 套接字属性的获取和设置 #include <sys/types.h> /* See NOTES */#include <sys/socket.h>int getsockopt(int sockfd, int level, int optname,void *optval, socklen_t *optlen);int setsockopt(int sockfd, int level…...

蚂蚁AL1 15.6T 创新科技的新典范
● 哈希率:算力达到15.6T(相当于15600G),即每秒能够进行15.6万亿次哈希计算,在同类产品中算力较为出色,能提高WA掘效率。 ● 功耗:功耗为3510W,虽然数值看似不低,但结合其…...

2024年【汽车驾驶员(技师)】考试报名及汽车驾驶员(技师)试题及解析
题库来源:安全生产模拟考试一点通公众号小程序 汽车驾驶员(技师)考试报名参考答案及汽车驾驶员(技师)考试试题解析是安全生产模拟考试一点通题库老师及汽车驾驶员(技师)操作证已考过的学员汇总…...

2024年【甘肃省安全员C证】报名考试及甘肃省安全员C证考试总结
题库来源:安全生产模拟考试一点通公众号小程序 甘肃省安全员C证报名考试参考答案及甘肃省安全员C证考试试题解析是安全生产模拟考试一点通题库老师及甘肃省安全员C证操作证已考过的学员汇总,相对有效帮助甘肃省安全员C证考试总结学员顺利通过考试。 1、…...

RabbitMQ 双机系统偶尔丢失消息问题排查
实话说起来,这个问题,实际是一个非常低级的错误导致的,算不得什么高深的技术问题。但是在排查的过程中,却是费了好大的功夫,死了不少脑细胞。所以也值得记录一下,算作给大家提个醒,或许可以帮大…...

Python 环境搭建指南 超详细
Python是由荷兰⼈吉多范罗苏姆(Guido von Rossum,后⾯都称呼他为Guido)发明的⼀种编程语言 1. 1989年圣诞节:Guido开始写Python语⾔的编译器。2. 1991年2⽉:第⼀个Python解释器诞⽣,它是⽤C语⾔实现的&…...

使用三菱PLC源码进行PLC读取写入操作
安装 MX Component 。 我的安装地址在: 打开 utl 文件夹下的 Communication Settings Utility 执行。 配置PLC 添加当前需要配置的PLC 注意 logical station Namber 就是程序里需要对接的逻辑站点编号 5.配置选择对应的COM操作选择对应的cpu型型号,…...

使用Nvm切换nodeJs高版本之后,使用npm install一闪而过
先说现象,最近又有几个项目接手,其中有一个使用NVM切换至高版本node后,出现如下症状; 没有任何提示,然后翻看文件目录,node_modules目录没有创建,同时在全局 npm config set prefix 设置的目录下 多了一个 pgn的快捷,指向项目目录。 使用百度或者chart-gtp,搜索到的答案…...

【Kubernetes】k8s集群安全机制
目录 一.认证 1.k8s集群内的三种认证方式 2.k8s集群内的认证说明 2.1.需要被认证的访问类型 2.2.安全性说明 2.3.证书颁发的方式 2.4.kubeconfig 2.5.Service Account 2.6.Secret 与 SA 的关系 二.鉴权 1.鉴权的方式 2.RBAC的角色与角色绑定 2.1.RBAC的角色 2.2…...

嵌入式学习---DAY24:进程--二
一、exec函数族----启动一个新程序 用fork创建子进程后执行的是和父进程相同的程序(但有可能执行不同的代码分支), 子进程往往要调用一种exec函数以执行另一个程序。当进程调用一种exec函数时,该进程的 用户空间代码和数据完全被…...

Diffusion Model相关论文解析之(二)DENOISING DIFFUSION IMPLICIT MODELS
目录 1、摘要2、创新点3、主要公式4、自己的理解,对错不确定 1、摘要 Denoising Diffusion Implicit Models (DDIM)是一种扩散模型的改进版本,旨在加速采样过程并提高采样速度。DDIM通过引入非马尔可夫扩散过程,相对于传统的去噪扩散概率…...

【STM32嵌入式系统设计与开发拓展】——14_定时器之输入捕获
参考哔站:链接: 铁头山羊 一、微控制器的高级定时与控制功能集合 1、时基单元 2、输入捕获 3、输出比较 4、从模式控制器 5、高级定时器的输出控制 二、问题集合 1、什么是定时器 定时器是一种专门负责定时功能的片上外设GPI0AFI0EXTIUSART RCC I2C) 2、定时器…...

docker swarm如何让两个副本分别跑在两台不同的主机上
虽然 docker swarm 支持自动扩容部署,但是为了服务的稳定性、可靠性,有的时候甲方巴巴会要求一定要服务分散部署在不同的服务器上。 使用默认的部署方式,虽然副本为 N,但是部署的 N 个服务可能落在同一台服务器上。 在 Docker Swa…...

XCTF-web-easyupload
试了试php,php7,pht,phtml等,都没有用 尝试.user.ini 抓包修改将.user.ini修改为jpg图片 在上传一个123.jpg 用蚁剑连接,得到flag...
【入坑系列】TiDB 强制索引在不同库下不生效问题
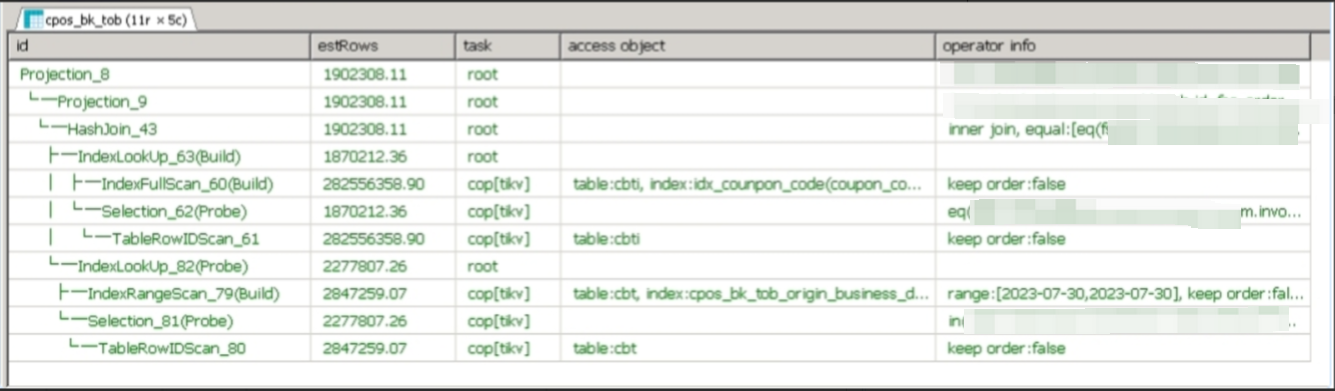
文章目录 背景SQL 优化情况线上SQL运行情况分析怀疑1:执行计划绑定问题?尝试:SHOW WARNINGS 查看警告探索 TiDB 的 USE_INDEX 写法Hint 不生效问题排查解决参考背景 项目中使用 TiDB 数据库,并对 SQL 进行优化了,添加了强制索引。 UAT 环境已经生效,但 PROD 环境强制索…...

鱼香ros docker配置镜像报错:https://registry-1.docker.io/v2/
使用鱼香ros一件安装docker时的https://registry-1.docker.io/v2/问题 一键安装指令 wget http://fishros.com/install -O fishros && . fishros出现问题:docker pull 失败 网络不同,需要使用镜像源 按照如下步骤操作 sudo vi /etc/docker/dae…...
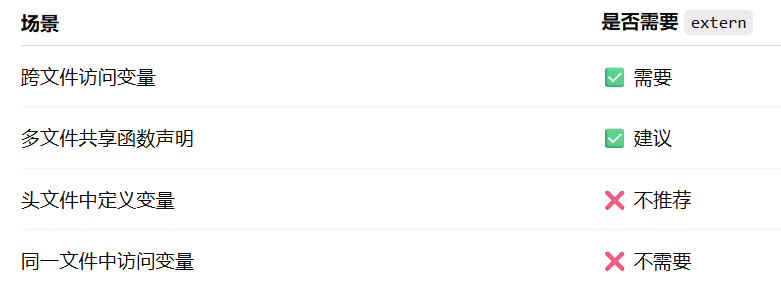
深入解析C++中的extern关键字:跨文件共享变量与函数的终极指南
🚀 C extern 关键字深度解析:跨文件编程的终极指南 📅 更新时间:2025年6月5日 🏷️ 标签:C | extern关键字 | 多文件编程 | 链接与声明 | 现代C 文章目录 前言🔥一、extern 是什么?&…...
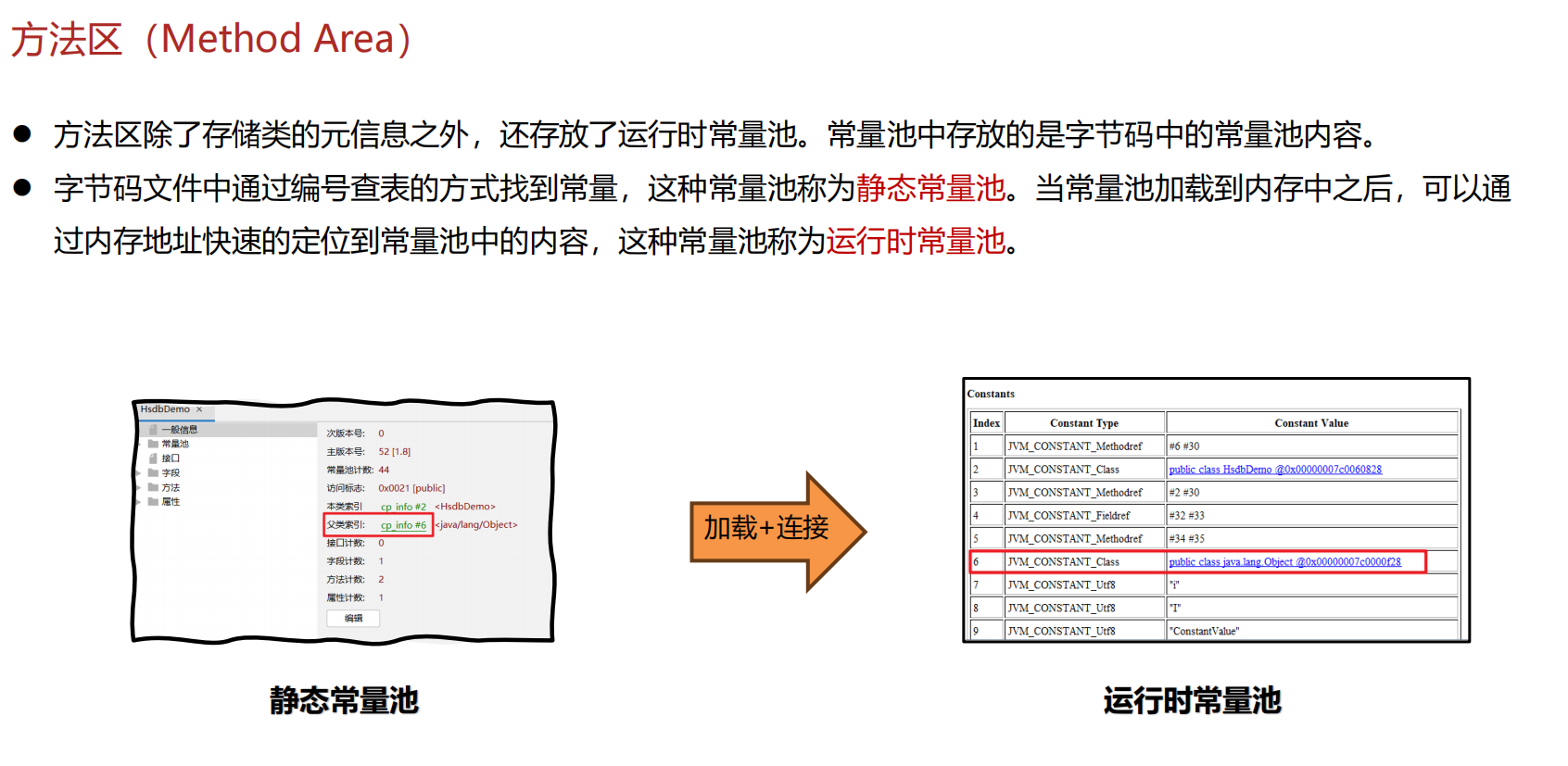
JVM 内存结构 详解
内存结构 运行时数据区: Java虚拟机在运行Java程序过程中管理的内存区域。 程序计数器: 线程私有,程序控制流的指示器,分支、循环、跳转、异常处理、线程恢复等基础功能都依赖这个计数器完成。 每个线程都有一个程序计数…...

return this;返回的是谁
一个审批系统的示例来演示责任链模式的实现。假设公司需要处理不同金额的采购申请,不同级别的经理有不同的审批权限: // 抽象处理者:审批者 abstract class Approver {protected Approver successor; // 下一个处理者// 设置下一个处理者pub…...

PAN/FPN
import torch import torch.nn as nn import torch.nn.functional as F import mathclass LowResQueryHighResKVAttention(nn.Module):"""方案 1: 低分辨率特征 (Query) 查询高分辨率特征 (Key, Value).输出分辨率与低分辨率输入相同。"""def __…...
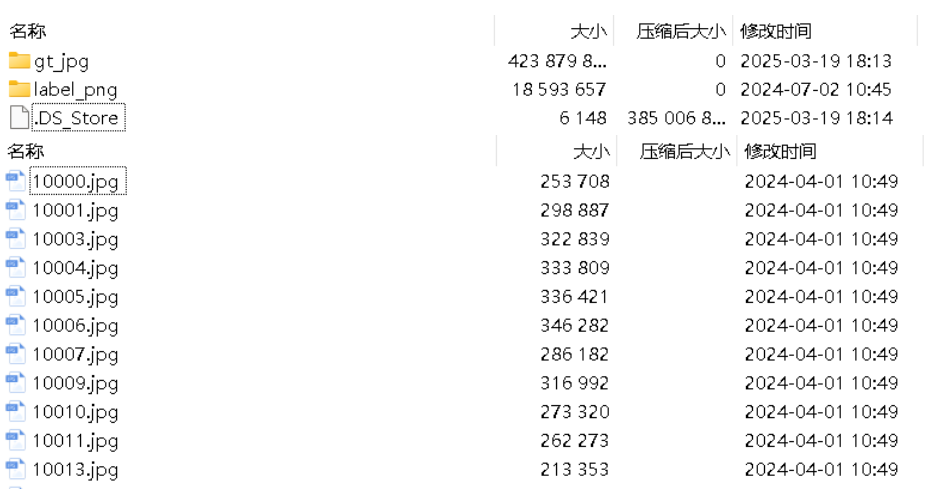
面向无人机海岸带生态系统监测的语义分割基准数据集
描述:海岸带生态系统的监测是维护生态平衡和可持续发展的重要任务。语义分割技术在遥感影像中的应用为海岸带生态系统的精准监测提供了有效手段。然而,目前该领域仍面临一个挑战,即缺乏公开的专门面向海岸带生态系统的语义分割基准数据集。受…...

k8s从入门到放弃之Pod的容器探针检测
k8s从入门到放弃之Pod的容器探针检测 在Kubernetes(简称K8s)中,容器探测是指kubelet对容器执行定期诊断的过程,以确保容器中的应用程序处于预期的状态。这些探测是保障应用健康和高可用性的重要机制。Kubernetes提供了两种种类型…...

C#中用于控制自定义特性(Attribute)
我们来详细解释一下 [AttributeUsage(AttributeTargets.Class, AllowMultiple false, Inherited false)] 这个 C# 属性。 在 C# 中,Attribute(特性)是一种用于向程序元素(如类、方法、属性等)添加元数据的机制。Attr…...