【YOLO5 项目实战】(4)红外目标检测
欢迎关注『youcans动手学模型』系列
本专栏内容和资源同步到 GitHub/youcans
【YOLO5 项目实战】(1)YOLO5 环境配置与测试
【YOLO5 项目实战】(2)使用自己的数据集训练目标检测模型
【YOLO5 项目实战】(3)PCB 缺陷检测
【YOLO5 项目实战】(4)红外目标检测
- 1. 红外目标检测数据集
- 2. 构建 YOLO 检测数据集
- 2.1 下载 CTIR 红外道路数据集
- 2.2 数据集格式转换
- 2.3 数据集配置文件
- 3. 训练红外目标检测模型
- 3.1 下载 YOLOv5 预训练模型
- 3.2 修改 YOLOv5 模型配置
- 3.3 YOLOv5 模型训练
- 3.4 模型训练结果
- 4. 模型推理
- 4.1 修改推理程序 detect.py
- 4.2 运行推理程序检测 红外图像
- 5. 报错处理
1. 红外目标检测数据集
1. FLIR 红外数据集
FLIR 红外数据集是一个免费的红外图像数据集,包含来自FLIR红外相机的高质量图像,包括多种类型的红外图像。
官网链接:https://www.flir.com/oem/adas/adas-dataset-form/
2. VEDAI 遥感目标检测数据集
包含9种类型的遥感地物目标。每种数据包含rgb、nir2种图像,共4波段。
类别:9类(plane,boat,camping car,car,pick-up,tractor,truck,van,other)
下载地址:https://downloads.greyc.fr/vedai/
3. SUCT 远红外行人检测数据集
数据集类型:远红外行人检测数据集
数据集类别:walk person、ride person、squat person、people、person?、people?
Github:https://github.com/SCUT-CV/SCUT_FIR_Pedestrian_Dataset
4. 面向空地应用的红外时敏目标检测跟踪数据集
面向红外时敏目标检测跟踪应用,以车辆为探测目标,以地面场景为探测背景的图像序列数据集。
下载地址:http://www.doi.org/10.11922/sciencedb.j00001.00331
5. CTIR 红外道路数据集
在中国道路上收集了46个视频。
标注的11938 张红外热图像包含 34078 辆汽车(Car)、31035 个行人(Pedestrian/Ped)、16524个骑自行车人(Cyclist/Cyc)、2404 辆公共汽车(Bus)和 1886 辆卡车(Truck/Tru)。
下载地址:https://pan.baidu.com/s/1YvDR_GP_ThzWeE9tMuigSA 提取码:x6l6

2. 构建 YOLO 检测数据集
2.1 下载 CTIR 红外道路数据集
CTIR 红外数据集标注的11938 张红外热图像包含5个类别: 汽车(Car)、行人(Pedestrian)、自行车(Cyclist)、公共汽车(Bus)和 卡车(Truck)。
数据集下载地址:https://pan.baidu.com/s/1YvDR_GP_ThzWeE9tMuigSA 提取码:x6l6
| Image | 7161 | 2390 | 2387 | 11938 |
|---|---|---|---|---|
| Train | Val | Test | Total | |
| Car | 20505 | 6828 | 6745 | 34078 |
| Pedestrian | 18711 | 6136 | 6188 | 31035 |
| Cyclist | 9895 | 3359 | 3270 | 16524 |
| Bus | 1455 | 479 | 470 | 2404 |
| Truck | 1132 | 387 | 367 | 1886 |
2.2 数据集格式转换
CTIR 红外数据集 包括 Annotations 和 Images 两个目录,分别保存 标注文件和红外图像文件(.jpeg)。标注文件采用 .xml 格式。
将CTIR 红外数据集转换为 YOLOv5 训练所需的格式,包括 3个步骤:
- 将图片数据集随机划分为训练数据集,验证数据集和测试数据集;
- 将 .xml 格式的标注文件转化为 .txt 格式的标注文件;
- 按照训练集、验证集和测试集整理文件夹。
采用以下程序实现这些步骤。
【例程1】将图片数据集随机划分为训练数据集,验证数据集和测试数据集
运行该程序后,在 “…//DatasetCTIR//ImageSets” 文件夹生成 test.txt, train.txt, trainval.txt, val.txt 文件,分别保存各数据集所对应的图片序号。
import os
import randomROOT = "..//DatasetCTIR//" # IR 数据集trainval_percent = 0.9
train_percent = 0.9
xmlfilepath = ROOT + "Annotations" # 标注数据集文件夹
txtsavepath = ROOT + "ImageSets" # 数据集索引文件夹
if not os.path.exists(txtsavepath):os.makedirs(txtsavepath)
# 获取该路径下所有文件的名称,存放在list中
total_xml = os.listdir(xmlfilepath)num = len(total_xml)
list = range(num)
tv = int(num * trainval_percent)
tr = int(tv * train_percent)
trainval = random.sample(list, tv)
train = random.sample(trainval, tr)ftrainval = open(ROOT + "ImageSets/trainval.txt", "w") # 训练集验证集图片名称
ftrain = open(ROOT + "ImageSets/train.txt", "w") # 训练集图片名称
ftest = open(ROOT + "ImageSets/test.txt", "w") # 测试机图片名称
fval = open(ROOT + "ImageSets/val.txt", "w") # 验证集图片名称for i in list:# 获取文件名称中.xml之前的序号name = total_xml[i][:-4] + "\n"if i in trainval:ftrainval.write(name)if i in train:ftrain.write(name)else:fval.write(name)else:ftest.write(name)ftrainval.close()
ftrain.close()
fval.close()
ftest.close()【例程2】解析 .xml 标注文件,将其转化为YOLOv5 所需的 .txt 格式标注文件。
xml文件包含的边界框以及图片长宽大小等信息,并进行归一化,写入 txt文件
import xml.etree.ElementTree as ET # xml解析包
import os# 归一化
def convert(size, box): # size:(原图w,原图h) , box:(xmin,xmax,ymin,ymax)dw = 1. / size[0] # 1/wdh = 1. / size[1] # 1/hx = (box[0] + box[1]) / 2.0 # 物体在图中的中心点x坐标y = (box[2] + box[3]) / 2.0 # 物体在图中的中心点y坐标w = box[1] - box[0] # 物体实际像素宽度h = box[3] - box[2] # 物体实际像素高度x = x * dw # 物体中心点x的坐标比(相当于 x/原图w)w = w * dw # 物体宽度的宽度比(相当于 w/原图w)y = y * dh # 物体中心点y的坐标比(相当于 y/原图h)h = h * dh # 物体宽度的宽度比(相当于 h/原图h)return (x, y, w, h) # 返回 相对于原图的物体中心点的x坐标比,y坐标比,宽度比,高度比,取值范围[0-1]# 将对应文件名的 xml文件转化为 txt 格式的标注文件
def convert_annotation(root, image_id):"""每张图片文件对应一个xml文件,转换为一个 txt标注文件txt 文件中每行表示一个标注: class x y w h"""# 对应的通过year 找到相应的文件夹,并且打开相应image_id的xml文件,其对应bund文件in_file = open(root + "Annotations/%s.xml" %(image_id), encoding="utf-8")# 准备在对应的image_id 中写入对应的label,分别为# <object-class> <x> <y> <width> <height>out_file = open(root + "Labels/%s.txt" %(image_id), "w", encoding="utf-8")# 解析xml文件tree = ET.parse(in_file)# 获得对应的键值对root = tree.getroot()# 获得图片的尺寸大小size = root.find("size")# 如果xml内的标记为空,增加判断条件if size != None:# 获得宽w = int(size.find("width").text)# 获得高h = int(size.find("height").text)# 遍历目标objfor obj in root.iter("object"):# 获得difficultif obj.find("difficult"):difficult = int(obj.find("difficult").text)else:difficult = 0# 获得类别 =string 类型cls = obj.find("name").text# 如果类别不是对应在我们预定好的class文件中,或difficult==1则跳过if cls not in classes or int(difficult) == 1:continue# 通过类别名称找到idcls_id = classes.index(cls)# 找到bndbox 对象xmlbox = obj.find("bndbox")# 获取对应的bndbox的数组 = ["xmin","xmax","ymin","ymax"]b = (float(xmlbox.find("xmin").text), float(xmlbox.find("xmax").text), float(xmlbox.find("ymin").text),float(xmlbox.find("ymax").text))print(image_id, cls, b)# 带入进行归一化操作# w = 宽, h = 高, b= bndbox的数组 = ["xmin","xmax","ymin","ymax"]bb = convert((w, h), b)# bb 对应的是归一化后的(x,y,w,h)# 生成 calss x y w h 在label文件中out_file.write(str(cls_id) + " " +" ".join([str(a) for a in bb]) + "\n")if __name__ == "__main__":sets = ["train", "test", "val"]classes = ["Car", "Pedestrian", "Cyclist", "Bus", "Truck"] # 修改为训练集类别ROOT = "..//DatasetCTIR//" # IR 数据集if not os.path.exists(ROOT + "labels/"): # 如果不存在 labels文件夹os.makedirs(ROOT + "Labels/") # 则创建 labels文件夹# 遍历数据集中的所有图片文件for image_set in sets:"""对所有的文件数据集进行遍历1.将所有图片文件都遍历一遍,并且将其所有的全路径都写在对应的txt文件中去 方便定位2.同时对所有的图片文件进行解析和转化,将其对应的 bundingbox 以及类别的信息全部解析写到 label 文件中去最后再通过直接读取文件 就能找到对应的 label 信息"""# 读取 ImageSets 中的 train, test, val 等文件列表内容image_ids = open(ROOT + "ImageSets/%s.txt" %(image_set)).read().strip().split()# 打开对应的.txt 文件,准备写入list_file = open(ROOT + "%s.txt" % (image_set), "w")for image_id in image_ids:# 写入对应的image_id以及路径list_file.write(ROOT + "Images/%s.jpg\n" % (image_id))# 解析xml文件的标注格式convert_annotation(root=ROOT, image_id=image_id)# 关闭文件list_file.close()【例程3】按照训练集、验证集和测试集整理文件夹。
将原始数据集划分为训练集、测试集和验证集,并重新组织。
import argparse
import glob
from pathlib import Path
import random
import shutil
import os
from tqdm import tqdm
from concurrent.futures import ThreadPoolExecutorNUM_THREADS = min(8, max(1, os.cpu_count() - 1))def run(func, this_iter, desc="Processing"):with ThreadPoolExecutor(max_workers=NUM_THREADS, thread_name_prefix='MyThread') as executor:results = list(tqdm(executor.map(func, this_iter), total=len(this_iter), desc=desc))return resultsdef split_dataset_into_train_val_test(dataset_dir,save_dir,train_ratio=0.8,val_ratio=0.1,test_ratio=0.1,im_suffix='jpg'
):if isinstance(dataset_dir, str):dataset_dir = Path(dataset_dir)image_files = []for suffix in im_suffix:image_files += glob.glob(str(dataset_dir / 'Images' / f"*.{suffix}"))total_images = len(image_files)random.shuffle(image_files)train_split = int(total_images * train_ratio)val_split = int(total_images * val_ratio)# test_split = int(total_images * test_ratio)if train_ratio + val_ratio == 1:train_images = image_files[:train_split]val_images = image_files[train_split:]test_images = []else:train_images = image_files[:train_split]val_images = image_files[train_split : train_split + val_split]test_images = image_files[train_split + val_split :]print('*'*25)print("",f"Total images: {total_images}\n",f"Train images: {len(train_images)}\n",f"Val images: {len(val_images)}\n",f"Test images: {len(test_images)}")print('*'*25)split_paths = [("train", train_images), ("val", val_images), ("test", test_images)]print(split_paths)for split_name, images in split_paths:split_dir = Path(save_dir) / split_namefor dir_name in ['images', 'labels']:if not (split_dir / dir_name).exists():(split_dir / dir_name).mkdir(exist_ok=True, parents=True)args_list = [(image, dataset_dir, split_dir) for image in images]run(process_image, args_list, desc=f"Creating {split_name} dataset")print(f"Created {split_name} dataset with {len(images)} images.")def process_image(args):image_file, dataset_dir, split_dir = argsannotation_file = dataset_dir / 'labels' / f"{Path(image_file).stem}.txt"assert annotation_file.exists(), f'{annotation_file} 不存在!'if not has_objects(annotation_file):returnshutil.copy(image_file, split_dir / "images" / Path(image_file).name)shutil.copy(annotation_file, split_dir / "labels" / annotation_file.name)def has_objects(annotation_path):with open(annotation_path, "r") as f:lines = f.readlines()return len(lines) > 0if __name__ == "__main__":ROOT = "..//DatasetCTIR//" # IR 数据集parser = argparse.ArgumentParser()parser.add_argument('--data', default=ROOT) # 数据集Images路径parser.add_argument('--save', default=ROOT) # 保存路径parser.add_argument('--images_suffix', default=['jpg', 'png', 'jpeg'], help='images suffix') # 图片后缀名opt = parser.parse_args()split_dataset_into_train_val_test(dataset_dir=opt.data,save_dir=opt.save,train_ratio=0.8,val_ratio=0.1,im_suffix=opt.images_suffix)运行程序,生成如下目录,分别保存训练集、测试集和验证集的图像与标注。

2.3 数据集配置文件
YOLOv5 模型训练时,要调用数据集配置文件 YAML 文件( .yaml)。因此,需要创建自己的数据集配置文件 dataCTIR.yaml,内容如下:
train: ../DataSetCTIR/train/images
val: ../DataSetCTIR/val/images
test: ../DataSetCTIR/test/images # option# number of classes
nc: 5# Class names
names: ["Car", "Pedestrian", "Cyclist", "Bus", "Truck"] 其中,train 表示训练集图像文件夹的路径,val 表示验证集图像文件夹的路径,test 表示测试集图像文件夹的路径。nc:5 表示类别数为 5,names 表示 3个类别的名称。
注意,nc 是由数据集的标注内容决定的,不能自行修改。
3. 训练红外目标检测模型
3.1 下载 YOLOv5 预训练模型
推荐从 YOLOv5 release下载 YOLOv5 预训练模型。
本文选择 YOLOv5s,参数约 7.2M。下载完成后,将下载的预训练模型文件 yolov5s.pt 放在 YOLOv5 项目路径。
3.2 修改 YOLOv5 模型配置
在 yolov5/models/ 目录下,打开模型配置文件 yolov5s.yaml,把文件中的类别数改为 5 ,另存为 /models/yolov5sCTIR.yaml。
# Ultralytics YOLOv5 🚀, AGPL-3.0 license# Parameters
nc: 5 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple
anchors:- [10, 13, 16, 30, 33, 23] # P3/8- [30, 61, 62, 45, 59, 119] # P4/16- [116, 90, 156, 198, 373, 326] # P5/32
...
3.3 YOLOv5 模型训练
1. 训练程序查看帮助
从 PyCharm 命令行输入“ python train.py -h” 可以查看帮助,也可以检查程序是否有错误。
输出如下:
(torch) PS C:\Python\PythonProjects\YOLOv5_PCB> python train2.py -h
usage: train.py [-h] [--weights WEIGHTS] [--cfg CFG] [--data DATA] [--hyp HYP] [--epochs EPOCHS] [--batch-size BATCH_SIZE] [--imgsz IMGSZ] [--rect] [--resume [RESUME]] [--nosave] [--noval] [--noautoanchor] [--noplots][--evolve [EVOLVE]] [--evolve_population EVOLVE_POPULATION] [--resume_evolve RESUME_EVOLVE] [--bucket BUCKET] [--cache [CACHE]] [--image-weights] [--device DEVICE] [--multi-scale] [--single-cls][--optimizer {SGD,Adam,AdamW}] [--sync-bn] [--workers WORKERS] [--project PROJECT] [--name NAME] [--exist-ok] [--quad] [--cos-lr] [--label-smoothing LABEL_SMOOTHING] [--patience PATIENCE][--freeze FREEZE [FREEZE ...]] [--save-period SAVE_PERIOD] [--seed SEED] [--local_rank LOCAL_RANK] [--entity ENTITY] [--upload_dataset [UPLOAD_DATASET]] [--bbox_interval BBOX_INTERVAL][--artifact_alias ARTIFACT_ALIAS] [--ndjson-console] [--ndjson-file]optional arguments:-h, --help show this help message and exit--weights WEIGHTS initial weights path--cfg CFG model.yaml path--data DATA dataset.yaml path--hyp HYP hyperparameters path--epochs EPOCHS total training epochs--batch-size BATCH_SIZEtotal batch size for all GPUs, -1 for autobatch--device DEVICE cuda device, i.e. 0 or 0,1,2,3 or cpu
...使用自己的数据集训练 YOLOv5 模型,,需要注意检查以下路径或参数值:
- weight,预训练模型权重文件,先选择下载的官方权重文件 yolov5s.pt。
- cfg,yolov5s 模型配置文件,选择修改的 models/yolov5sPCB.yaml。
- data,选择自己编写的数据集配置文件 DataSetYoloPCB/data.yaml。
- hyp HYP,超参数文件路径,可以修改模型训练参数,本文未涉及。
- epoch,整个数据集遍历训练次数,根据计算机性能和需要确定,默认值100,新手练习时可以设为 2。
- batch_size,每批读入的样本数量,根据计算机内存确定,默认值8,新手练习时可以设为 2。
- device,cuda 显卡设置,默认值为 0 表示使用 CPU训练,如有 GPU 显卡可以设为 1 或相应值。
2. 修改训练程序 train.py
对于新手,通过命令行直接输入模型训练参数比较麻烦,也可以直接对 YOLOv5 训练程序进行修改,设置模型训练的参数。
在 train.py 中对 weight,cfg,data 参数进行修改,另存为 train2.py:
parser = argparse.ArgumentParser()parser.add_argument("--weights", type=str, default=ROOT / "yolov5s.pt", help="initial weights path")parser.add_argument("--cfg", type=str, default=ROOT / "models/yolov5sCTIR.yaml", help="model.yaml path")parser.add_argument("--data", type=str, default=ROOT / "data/dataCTIR.yaml", help="dataset.yaml path")parser.add_argument("--hyp", type=str, default=ROOT / "data/hyps/hyp.scratch-low.yaml", help="hyperparameters path")parser.add_argument("--epochs", type=int, default=5, help="total training epochs")parser.add_argument("--batch-size", type=int, default=4, help="total batch size for all GPUs, -1 for autobatch")...
3. 运行训练程序 train2.py
通过命令行就可以运行 YOLOv5 训练程序 train2.py 。
如果计算机性能资源不足,可以设置较小的训练参数以便学习,例如:
python train2.py --weights yolov5s.pt --cfg models/yolov5sCTIR.yaml --data …/DataSetCTIR/dataCTIR.yaml --epoch 2 --batch-size 2
CPU 训练速度很慢,我做一次 epoch 大约要十几分钟。
使用 GPU训练,设置遍历次数 epoch=50,批次数 batch-size=32。
python train2.py --weights yolov5s.pt --cfg models/yolov5sCTIR.yaml --data …/DataSetCTIR/dataCTIR.yaml --epoch 50 --batch-size 32 --img 640 --device 1
经过100 epochs的训练,结果如下:
(torch) PS C:\Python\PythonProjects\YOLOv5_FLIR> python train2.py --weights yolov5s.pt --cfg models/yolov5sCTIR.yaml --data ../DataSetCTIR/dataCTIR.yaml --epoch 20 --batch-size 32 --img 640 --device 1
train2: weights=yolov5s.pt, cfg=models/yolov5sCTIR.yaml, data=../DataSetCTIR/dataCTIR.yaml, hyp=data\hyps\hyp.scratch-low.yaml, epochs=20, batch_size=32, imgsz=640, rect=False, resume=False, nosave=False, noval=False, noautoanchor=False, noplots=False, evolve=None, evolve_population=data\hyps, resume_evolve=None, bucket=, cache=None, image_weights=False, device=1, multi_scale=False, single_cls=False, optimizer=SGD, sync_bn=False, workers=8, project=runs\train, name=exp, exist_ok=False, quad=False, cos_lr=False, label_smoothing=0.0, patience=100, freeze=[0], save_period=-1, seed=0, local_rank=-1, entity=None, upload_dataset=False, bbox_interval=-1, artifact_alias=latest, ndjson_console=False, ndjson_file=False
github: skipping check (not a git repository), for updates see https://github.com/ultralytics/yolov5
YOLOv5 2024-7-29 Python-3.8.19 torch-2.3.1+cu121 CUDA:1 (NVIDIA GeForce RTX 3060, 12288MiB)hyperparameters: lr0=0.01, lrf=0.01, momentum=0.937, weight_decay=0.0005, warmup_epochs=3.0, warmup_momentum=0.8, warmup_bias_lr=0.1, box=0.05, cls=0.5, cls_pw=1.0, obj=1.0, obj_pw=1.0, iou_t=0.2, anchor_t=4.0, fl_gamma=0.0, hsv_h=0.015, hsv_s=0.7, hsv_v=0.4, degrees=0.0, translate=0.1, scale=0.5, shear=0.0, perspective=0.0, flipud=0.0, fliplr=0.5, mosaic=1.0, mixup=0.0, copy_paste=0.0
Comet: run 'pip install comet_ml' to automatically track and visualize YOLOv5 runs in Comet
TensorBoard: Start with 'tensorboard --logdir runs\train', view at http://localhost:6006/from n params module arguments0 -1 1 3520 models.common.Conv [3, 32, 6, 2, 2]1 -1 1 18560 models.common.Conv [32, 64, 3, 2]2 -1 1 18816 models.common.C3 [64, 64, 1]3 -1 1 73984 models.common.Conv [64, 128, 3, 2]4 -1 2 115712 models.common.C3 [128, 128, 2]5 -1 1 295424 models.common.Conv [128, 256, 3, 2]6 -1 3 625152 models.common.C3 [256, 256, 3]7 -1 1 1180672 models.common.Conv [256, 512, 3, 2]8 -1 1 1182720 models.common.C3 [512, 512, 1] 9 -1 1 656896 models.common.SPPF [512, 512, 5]10 -1 1 131584 models.common.Conv [512, 256, 1, 1]11 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest']12 [-1, 6] 1 0 models.common.Concat [1]13 -1 1 361984 models.common.C3 [512, 256, 1, False]14 -1 1 33024 models.common.Conv [256, 128, 1, 1]15 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest']16 [-1, 4] 1 0 models.common.Concat [1]17 -1 1 90880 models.common.C3 [256, 128, 1, False]18 -1 1 147712 models.common.Conv [128, 128, 3, 2]19 [-1, 14] 1 0 models.common.Concat [1]20 -1 1 296448 models.common.C3 [256, 256, 1, False]21 -1 1 590336 models.common.Conv [256, 256, 3, 2] 22 [-1, 10] 1 0 models.common.Concat [1]23 -1 1 1182720 models.common.C3 [512, 512, 1, False]24 [17, 20, 23] 1 26970 models.yolo.Detect [5, [[10, 13, 16, 30, 33, 23], [30, 61, 62, 45, 59, 119], [116, 90, 156, 198, 373, 326]], [128, 256, 512]]
YOLOv5sCTIR summary: 214 layers, 7033114 parameters, 7033114 gradients, 16.0 GFLOPsTransferred 342/349 items from yolov5s.pt
AMP: checks failed , disabling Automatic Mixed Precision. See https://github.com/ultralytics/yolov5/issues/7908
optimizer: SGD(lr=0.01) with parameter groups 57 weight(decay=0.0), 60 weight(decay=0.0005), 60 bias
train: Scanning C:\Python\PythonProjects\DataSetCTIR\train\labels.cache... 9550 images, 0 backgrounds, 0 corrupt: 100%|██████████| 9550/9550 [00:00<?, ?it/s]
val: Scanning C:\Python\PythonProjects\DataSetCTIR\val\labels.cache... 1193 images, 0 backgrounds, 0 corrupt: 100%|██████████| 1193/1193 [00:00<?, ?it/s]AutoAnchor: 5.26 anchors/target, 1.000 Best Possible Recall (BPR). Current anchors are a good fit to dataset
Plotting labels to runs\train\exp2\labels.jpg...
Image sizes 640 train, 640 val
Using 8 dataloader workers
Logging results to runs\train\exp2
Starting training for 20 epochs...Epoch GPU_mem box_loss obj_loss cls_loss Instances Size0/19 6.92G 0.06892 0.06228 0.02963 134 640: 100%|██████████| 299/299 [01:23<00:00, 3.57it/s]Class Images Instances P R mAP50 mAP50-95: 100%|██████████| 19/19 [00:07<00:00, 2.41it/s]all 1193 8624 0.373 0.655 0.498 0.276Epoch GPU_mem box_loss obj_loss cls_loss Instances Size1/19 7.8G 0.05093 0.05178 0.0162 213 640: 100%|██████████| 299/299 [01:19<00:00, 3.78it/s]Class Images Instances P R mAP50 mAP50-95: 100%|██████████| 19/19 [00:08<00:00, 2.35it/s]all 1193 8624 0.65 0.672 0.711 0.395...Epoch GPU_mem box_loss obj_loss cls_loss Instances Size49/49 7.8G 0.02582 0.03787 0.003294 178 640: 100%|██████████| 299/299 [01:28<00:00, 3.37it/s]Class Images Instances P R mAP50 mAP50-95: 100%|██████████| 19/19 [00:08<00:00, 2.34it/s]all 1193 8624 0.845 0.799 0.875 0.63350 epochs completed in 1.367 hours.
Optimizer stripped from runs\train\exp3\weights\last.pt, 14.4MB
Optimizer stripped from runs\train\exp3\weights\best.pt, 14.4MBValidating runs\train\exp2\weights\best.pt...
Fusing layers...
YOLOv5sCTIR summary: 157 layers, 7023610 parameters, 0 gradients, 15.8 GFLOPsClass Images Instances P R mAP50 mAP50-95: 100%|██████████| 19/19 [00:10<00:00, 1.83it/s]all 1193 8624 0.847 0.822 0.883 0.634Car 1193 3393 0.903 0.892 0.951 0.736Pedestrian 1193 3180 0.861 0.804 0.895 0.564Cyclist 1193 1619 0.886 0.876 0.931 0.625Bus 1193 282 0.82 0.84 0.877 0.663Truck 1193 150 0.766 0.698 0.762 0.58Results saved to runs\train\exp3其中,Epoch 为遍历次数,box_loss 为边界框损失值,obj_loss为置信度损失值,cls_loss 为分类损失值,Instances 为实例个数(矩形框个数),Size 为输入图像大小。Class 为类别名称,Images 为训练图像数量,Instances 为实例个数,P 为准确率,R为召回率,mAP50为IoU阈值0.5的平均精度均值,maP50-95表示在不同IoU阈值(0.5~0.95)的平均精度均值。
训练好的模型,保存在路径:“runs/exp/weights”,best.pt 是最好结果,last.pt 是最后结果。
3.4 模型训练结果
经过 20 轮遍历训练,训练过程及结果文件保存在目录 “runs”,如下图所示:

(1)损失函数下降曲线
YOLOv5 中定义的损失函数包括:
- 边界框定位损失(box_loss):计算预测边界框与标注边界框之间的误差(GIoU)
- 分类损失(cls_loss):计算预测类别与对应的标注类别是否正确
- 动态特征损失(dfl_loss):计算回归预测框与目标框之间距离的损失函数

(2)置信度曲线
- F1 置信曲线,F1得分随着置信度阈值的变化。F1得分是精确度和召回率的调和平均值,曲线的峰值表示给定置信度阈值下精确度和召回率的最佳平衡点。
- 精确度置信曲线,模型预测的精确度随着置信度阈值的变化。精确度是模型预测正确正例与预测为正例总数的比值。
- 精确度召回曲线(PR曲线),模型的精确度与召回率之间的关系。理想情况下,模型应在精确度和召回率之间保持良好的平衡。
- 召回置信度曲线,模型的召回率随置信度阈值的变化。召回率是模型正确预测的正例与实际正例总数的比值。

训练好的模型,保存在路径:“runs/exp/weights”,best.pt 是最好结果,last.pt 是最后结果。可以使用该文件进行模型推理,检测红外目标。
4. 模型推理
4.1 修改推理程序 detect.py
detect.py 程序使用PyTorch加载预训练的YOLOv5模型。程序解析从命令行传入的参数,这些参数包括输入文件的路径(可以是图像、视频或目录)、预训练模型的路径、输出文件的路径、置信度阈值等。具体用法如下:
detect.py 程序默认读取 data\images 路径的图片,结果默认保存到 runs/detect 文件夹中。
我们根据项目的配置,要对推理程序 detect.py 进行如下修改(也可以直接通过命令行参数设置):
def parse_opt():parser = argparse.ArgumentParser()parser.add_argument("--weights", nargs="+", type=str, default=ROOT / "weights/YOLOv5CTIR20.pt", help="model path or triton URL")parser.add_argument("--source", type=str, default=ROOT / "data/images", help="file/dir/URL/glob/screen/0(webcam)")parser.add_argument("--data", type=str, default=ROOT / "data/dataCTIR.yaml", help="(optional) dataset.yaml path")
...注意:
- YOLOv5CTIR20.pt 是前面训练的 CTIR 红外检测模型的权重文件 “runs/exp/weights/best.pt”,已将其另存为 “weights/YOLOv5CTIR20.pt”。
- “data/images” 是保存 PCB 测试图片的路径,也可以使用其它图片或路径。
- dataFLIR.yaml 是前面修改的数据集配置文件,已另存为 “data/dataCTIR.yaml”。
4.2 运行推理程序检测 红外图像
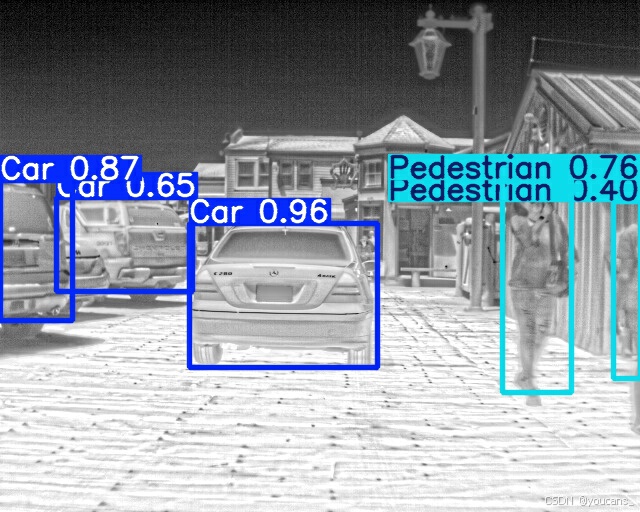
打开并运行 YOLOv5 项目中的 detect.py 程序,使用训练的 红外检测模型 “weights/YOLOv5CTIR20.pt” 进行 红外图像目标检测。
python detect.py
运行输出如下:
(torch) PS C:\Python\PythonProjects\YOLOv5_FLIR> python detect.py
detect: weights=weights\YOLOv5CTIR20.pt, source=data\images, data=data\dataCTIR.yaml, imgsz=[640, 640], conf_thres=0.25, iou_thres=0.45, max_det=1000, device=, view_img=False, save_txt=False, save_csv=False, save_conf=False, save_crop=False, nosave=False, classes=None, agnostic_nms=False, augment=False, visualize=False, update=False, project=runs\detect, name=exp, exist_ok=False, line_thickness=3, hide_labels=False, hide_conf=False, half=False, dnn=False, vid_stride=1
YOLOv5 2024-7-29 Python-3.8.19 torch-2.3.1+cu121 CUDA:0 (NVIDIA GeForce RTX 3060, 12288MiB)Fusing layers...
YOLOv5sCTIR summary: 157 layers, 7023610 parameters, 0 gradients, 15.8 GFLOPs
image 1/3 C:\Python\PythonProjects\YOLOv5_FLIR\data\images\FLIR_09135.jpeg: 512x640 3 Cars, 3 Pedestrians, 66.0ms
image 2/3 C:\Python\PythonProjects\YOLOv5_FLIR\data\images\FLIR_09138.jpeg: 512x640 3 Cars, 2 Pedestrians, 4.0ms
image 3/3 C:\Python\PythonProjects\YOLOv5_FLIR\data\images\FLIR_09156.jpeg: 512x640 3 Cars, 2 Pedestrians, 4.0ms
Speed: 0.7ms pre-process, 24.7ms inference, 1.3ms NMS per image at shape (1, 3, 640, 640)
Results saved to runs\detect\exp3
检测结果保存在 “runs\detect\exp3”,结果如下。性能还是很好的。

5. 报错处理
(1)Pytorch没有下载成功:
报错内容:Module Not Found Error: No module named ‘torch’
解决方法:通过 Anaconda 或 miniconda 重新下载安装 Pytorch。
(2)PyYaml 版本错误:
报错内容:AttributeError: ‘yaml’ has no attribute ‘FullLoader’
解决方法:卸载高版本 PyYaml,安装 PyYaml 5.3 版本:
pip install pyyaml==5.3
(3)Git 执行发生错误
报错内容:ImportError: Bad git executable.
解决方法:按照报错信息找到git下的cmd文件,添加下方代码:
import os
os.environ["GIT_PYTHON_REFRESH"] = "quiet"
(4)Numpy 版本问题
报错内容:AttributeError: module ‘numpy’ has no attribute ‘float’.
解决方法:不再使用 np.float ,需要将其修改为 np.float64 。
报错内容:AttributeError: module ‘numpy’ has no attribute ‘int’.
解决方法:不再使用 np.in ,需要将其修改为 np.int32 。
【本节完】
版权声明:
欢迎关注『youcans动手学模型』系列
转发请注明原文链接:
【YOLO5 项目实战】(4)红外目标检测
Copyright 2024 youcans, XUPT
Crated:2024-08-20
相关文章:
【YOLO5 项目实战】(4)红外目标检测
欢迎关注『youcans动手学模型』系列 本专栏内容和资源同步到 GitHub/youcans 【YOLO5 项目实战】(1)YOLO5 环境配置与测试 【YOLO5 项目实战】(2)使用自己的数据集训练目标检测模型 【YOLO5 项目实战】(3)P…...
游泳耳机哪个牌子好?角逐必选榜的4大王者游泳耳机测评解析!
在选择游泳耳机时,许多消费者往往会被市场上五花八门的产品所困扰。特别是那些标榜能够防水防潮的产品,但实际上它们往往缺乏核心技术支持,存在很高的损伤风险。据调查,超过90%的用户反映,市面上的游泳耳机常常无法达到…...

鹤岗房全国蔓延,现在要不要买房?
文|琥珀食酒社 作者 | 积溪 房子卖白菜价、人人都能买得起的时代 真的要来了 以前啊你花2万块钱 在大城市买不到一个厕所 可现在只要几万块你就能买一整套房 还带装修和家电 而且这样的房子还很多 “鹤岗”房已经在全国快速蔓延 那对咱普通人来说到底是好…...
Flink程序部署与提交
前言 我们看门见山,生产环境一般用的是在YARN上面采用应用模式进行部署flink程序。实际生产中一般需要和资源管理平台(如YARN)结合起来,选择特定的模式来分配资源、部署应用。 部署模式 在一些应用场景中,对于集群资源分配和占用的方式,可能会有特定的需求。Flink 为各…...
了解Android
Android 系统架构 从图中可以看出,整个Android操作系统分为五层。它们分别是: 内核层 Android系统是基于Linux内核的,这一层为Android设备的各种硬件提供了底层的驱动。硬件抽象层 该层为硬件厂商定义了一套标准的接口。这样可以在不影响上层…...

Tomcat学习进阶
目录 Apache Tomcat架构配置线程模型Tomcat 的类加载机制类加载器层次结构类加载流程 Tomcat 的优化策略Tomcat 的集群部署Tomcat故障排查 Apache Tomcat 架构配置 Apache Tomcat是一个开源的Java Servlet容器和Web服务器,它实现了Java EE规范中的Servlet和JSP API。…...
【C++】————智能指针
作者主页: 作者主页 本篇博客专栏:C 创作时间 :2024年8月20日 一,什么是智能指针 在C中没有垃圾回收机制,必须自己释放分配的内存,否则就会造成内存泄露。解决这个问题最有效的方法是使用智能指针&…...
的周期性)
GT IP中CC序列(Clock Correction Sequence)的周期性
CC序列(Clock Correction Sequence),即时钟校正序列,在数字通信中扮演着至关重要的角色。这一序列的周期性插入机制,旨在确保发送器和接收器之间的时钟同步,从而维持数据传输的准确性和稳定性。以下是CC序列…...

grafana pod 无法启动 Only one datasource per organization can be marked as default
标题信息 helm 部署的 prometheus 全栈监控 chart 为 prometheus-community/kube-prometheus-stack helm 部署的 loki 日志系统 chart 为 grafana/loki-stack 问题描述 grafana pod 启动不了,查看该pod 日志报错如下 logger=provisioning t=2024-08-21T06:42:45.954318228…...

你是如何克服编程学习中的挫折感的?(-@-^-0-)
在编程学习中遇到挫折感是极为常见且正常的现象,因为编程往往涉及解决复杂问题、理解抽象概念以及不断试错的过程。 以下是一些建议,帮助你在面对挫折时调整心态,继续前行: 接受失败是成长的一部分:首先要认识到&#…...
)
大数据技术之Zookeeper(1)
目录 Zookeeper 入门 概述 Zookeeper的主要特点包括: Zookeeper的应用场景: Zookeeper的基本概念: 架构: Zookeeper工作机制 Zookeeper数据结构 Znode(Zookeeper Node) Znode的类型 Znode路径 Znode属性 Wa…...
:泛型空安全模块导入导出)
鸿蒙学习(四):泛型空安全模块导入导出
泛型与函数 泛型类型和函数允许创建的代码在各种类型上运行,而不仅支持单一类型。 泛型类和接口(Element) 类和接口可以定义为泛型,将参数添加到类型定义中,如以下示例中的类型参数Element: class CustomStack<Element>…...
视觉感知论文汇总)
无人机(Unmanned Aerial Vehicle, UAV)视觉感知论文汇总
综述类 A Survey of Object Detection for UAVs Based on Deep LearningDeep Learning for UAV-based Object Detection and Tracking:A surveyMoving Target Tracking by Unmanned Aerial Vehicle:A Survey and TaxonomyVision-Based Learning for Dro…...
 扩展)
【ORACLE】 ORA-01691: Lob 段无法通过 8192 (在表空间 XXX_SPACE 中) 扩展
ORA-01691错误通常表示Oracle数据库在尝试扩展LOB段时无法为表空间分配更多的空间。这个问题通常由表空间容量不足引起。根据搜索结果,以下是几种可能的解决方案: 检查并扩大表空间:首先,确认表空间是否已经达到其最大容量。可以使…...

Java之静态代理与动态代理的区别
🍁 作者:知识浅谈,CSDN签约讲师,CSDN博客专家,华为云云享专家,阿里云专家博主 📌 擅长领域:全栈工程师、爬虫、ACM算法 🔥 微信:zsqtcyw 联系我领取学习资料 …...
公司内网监控软件有哪些?(2024年10款最新款推荐内网监控软件)
在2024年,公司内网监控软件市场提供了多种选择,以满足不同企业的监控需求。 以下是一些值得推荐的最新款内网监控软件: 1. Performance Monitor 核心功能:不仅是一款局域网监控软件,更是一个全面的内网安全管理解决方…...

CUDA编程07 - 卷积的优化
一:概述 在接下来的几篇文章中,我们将讨论一组重要的并行计算模式。这些模式是许多并行算法的基础,这些算法出现在许多并行应用中。我们将从卷积开始,卷积是一种流行的数组操作,广泛应用于信号处理、数字录音、图像处理、视频处理和计算机视觉等领域。在这些应用领域中,卷…...

解锁高效办公新姿势:SSO单点登录+企业网盘完美搭配
在现代互联网环境中,随着企业业务的不断扩展,多系统、多应用的集成成为常态。为了提升用户体验,减少用户在不同系统间切换的繁琐,单点登录(SSO, Single Sign-On)技术应运而生。 本文将详细介绍SSO单点登录的…...
[数据集][目标检测]竹子甘蔗发芽缺陷检测数据集VOC+YOLO格式2953张3类别
数据集格式:Pascal VOC格式YOLO格式(不包含分割路径的txt文件,仅仅包含jpg图片以及对应的VOC格式xml文件和yolo格式txt文件) 图片数量(jpg文件个数):2953 标注数量(xml文件个数):2953 标注数量(txt文件个数):2953 标注…...

RTC碰到LXTAL低频晶振停振怎么办?
GD32F303的RTC模块框图如下图所示,RTC时钟源可选择HXTAL/128、LXTAL或IRC40K,一般为了实现更精准的RTC时间,MCU系统均会外挂32.768KHz LXTAL低频晶振,但由于低频晶振负阻抗较大,不容易起振,若外部电路布线、…...
YSYX学习记录(八)
C语言,练习0: 先创建一个文件夹,我用的是物理机: 安装build-essential 练习1: 我注释掉了 #include <stdio.h> 出现下面错误 在你的文本编辑器中打开ex1文件,随机修改或删除一部分,之后…...
Nuxt.js 中的路由配置详解
Nuxt.js 通过其内置的路由系统简化了应用的路由配置,使得开发者可以轻松地管理页面导航和 URL 结构。路由配置主要涉及页面组件的组织、动态路由的设置以及路由元信息的配置。 自动路由生成 Nuxt.js 会根据 pages 目录下的文件结构自动生成路由配置。每个文件都会对…...

如何为服务器生成TLS证书
TLS(Transport Layer Security)证书是确保网络通信安全的重要手段,它通过加密技术保护传输的数据不被窃听和篡改。在服务器上配置TLS证书,可以使用户通过HTTPS协议安全地访问您的网站。本文将详细介绍如何在服务器上生成一个TLS证…...
Mac软件卸载指南,简单易懂!
刚和Adobe分手,它却总在Library里给你写"回忆录"?卸载的Final Cut Pro像电子幽灵般阴魂不散?总是会有残留文件,别慌!这份Mac软件卸载指南,将用最硬核的方式教你"数字分手术"࿰…...

unix/linux,sudo,其发展历程详细时间线、由来、历史背景
sudo 的诞生和演化,本身就是一部 Unix/Linux 系统管理哲学变迁的微缩史。来,让我们拨开时间的迷雾,一同探寻 sudo 那波澜壮阔(也颇为实用主义)的发展历程。 历史背景:su的时代与困境 ( 20 世纪 70 年代 - 80 年代初) 在 sudo 出现之前,Unix 系统管理员和需要特权操作的…...
使用 SymPy 进行向量和矩阵的高级操作
在科学计算和工程领域,向量和矩阵操作是解决问题的核心技能之一。Python 的 SymPy 库提供了强大的符号计算功能,能够高效地处理向量和矩阵的各种操作。本文将深入探讨如何使用 SymPy 进行向量和矩阵的创建、合并以及维度拓展等操作,并通过具体…...
VM虚拟机网络配置(ubuntu24桥接模式):配置静态IP
编辑-虚拟网络编辑器-更改设置 选择桥接模式,然后找到相应的网卡(可以查看自己本机的网络连接) windows连接的网络点击查看属性 编辑虚拟机设置更改网络配置,选择刚才配置的桥接模式 静态ip设置: 我用的ubuntu24桌…...
django blank 与 null的区别
1.blank blank控制表单验证时是否允许字段为空 2.null null控制数据库层面是否为空 但是,要注意以下几点: Django的表单验证与null无关:null参数控制的是数据库层面字段是否可以为NULL,而blank参数控制的是Django表单验证时字…...
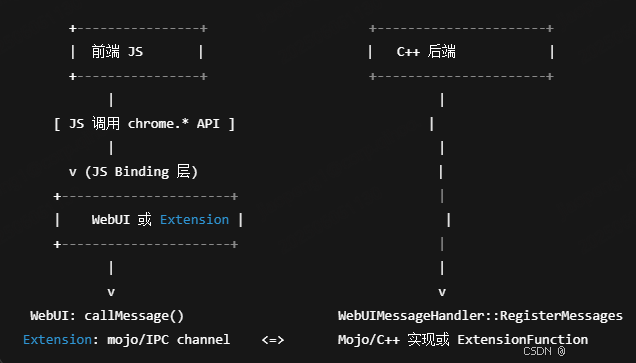
Chrome 浏览器前端与客户端双向通信实战
Chrome 前端(即页面 JS / Web UI)与客户端(C 后端)的交互机制,是 Chromium 架构中非常核心的一环。下面我将按常见场景,从通道、流程、技术栈几个角度做一套完整的分析,特别适合你这种在分析和改…...

Kubernetes 网络模型深度解析:Pod IP 与 Service 的负载均衡机制,Service到底是什么?
Pod IP 的本质与特性 Pod IP 的定位 纯端点地址:Pod IP 是分配给 Pod 网络命名空间的真实 IP 地址(如 10.244.1.2)无特殊名称:在 Kubernetes 中,它通常被称为 “Pod IP” 或 “容器 IP”生命周期:与 Pod …...