【从零开始实现stm32无刷电机FOC】【实践】【7.2/7 完整代码编写】
目录
- stm32cubemx配置
- 芯片选择
- 工程配置
- stm32基础配置
- SPI的配置
- 定时器的配置
- ADC的配置
- 中断优先级的配置
- 生成工程
- 工程代码编写
- FOC代码结构搭建
- 电机编码器角度读取
- PWM产生
- FOC开环代码编写
- 确定电机正负旋转方向
- 电机旋转速度计算
- 多圈逻辑角度
- 电流采样
- 极对数
- 转子角度确定
- 闭环控制
- 控制函数接口定义
- CMSIS-DSP提供的PID控制器
- 位置控制
- 速度控制
- 力矩(电流)控制
- 位置-速度-力矩控制
- PID系数调节
- 注意点
本节使用stm32cubemx配置外设,生成keil工程,代码适配本文的硬件电路板(可参考上节的硬件设计内容)。
- 点击查看本文开源的完整FOC工程https://gitee.com/best_pureer/stm32_foc。
stm32cubemx配置
芯片选择
选择stm32f103c8t6后,点击Start Project。

工程配置
切换到Projeck Manager页面,设定好项目名称、项目路径,选择生成keil工程。

stm32基础配置
- 配置时钟
这里选择晶振:

切换到Clock Configuration页面,首先选择PLLCLK,再HCLK输入72,再点击确认会自动生成72MHz的主频。

- SWD接口配置
用于烧录和调试程序

- 串口配置
用于打印一些调试信息,选择串口2,因为串口1会被定时器1的pwm通道占用

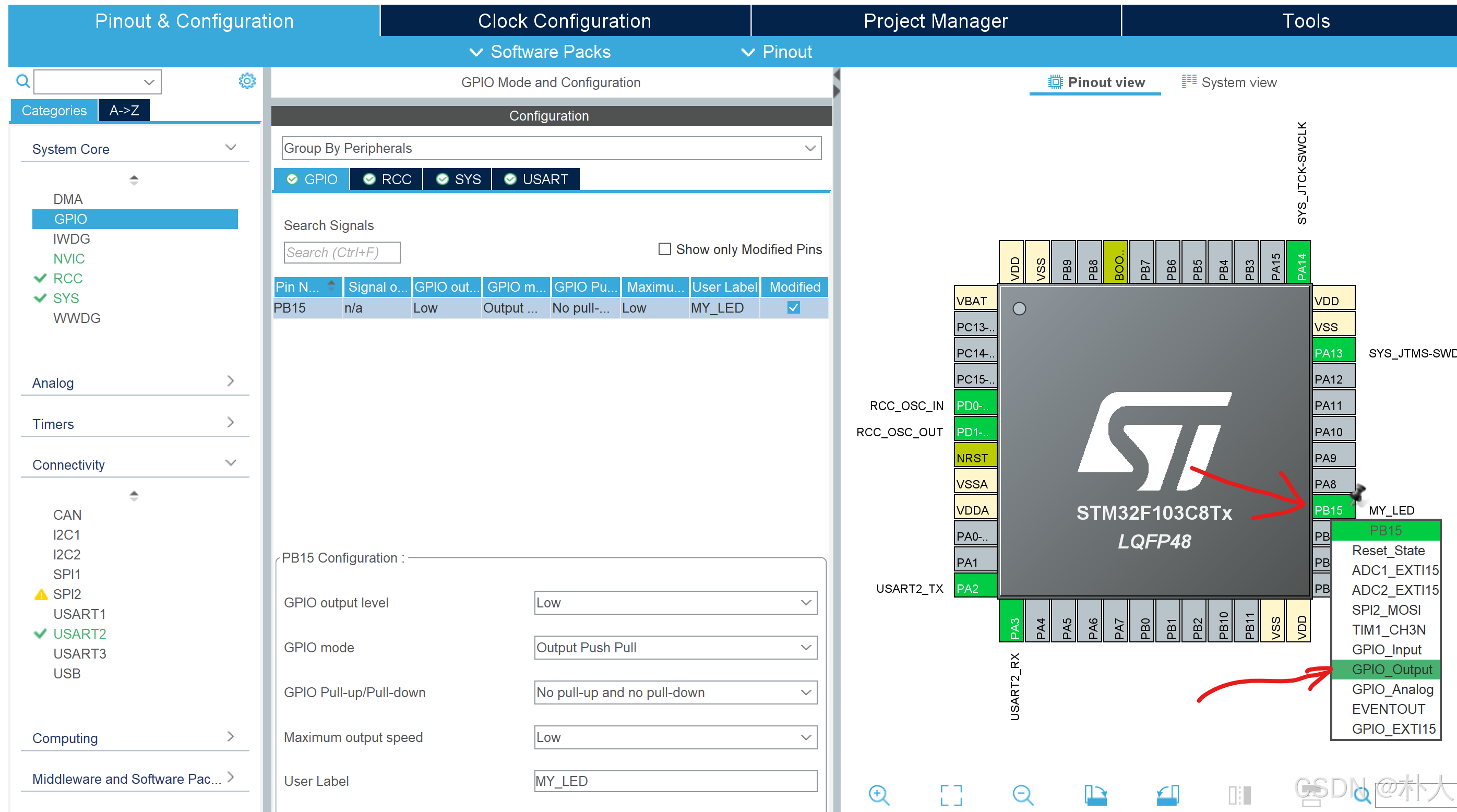
- LED灯配置
- CMSIS-DSP数学库配置
第一步:

第二步:

SPI的配置
用于读取MT6701,这里的SPI波特率不要设置太高,因为stm32f103c8t6的计算能力有限,角度读的太快算不过来。
从MT6701的数据手册中可以看到,应该在CLK的每2个脉冲时读取DO的数据,而且CLK空闲电平是低电平,因此设置CPOL为Low,CPHA为2个边沿。
由于D13先发送,因此是先高位传输,即MSB大端传输方式。

这里将SPI的模式设置为全双工Full-Duplex Master,而不设置为只读取模式Receive Only Master。虽然单片机的SPI只需要读取MT6701的数据,无需SPI写入数据,但是实测设置为只读取模式时,貌似是每读完1个字节进一次读取完成中断,而我们想要的是每读完3个字节进一次读取完成中断,全双工模式能做到这个效果。
注意不要使用硬件片选NSS(对应芯片CSN读取使能引脚),因为硬件片选NSS是单片机disable对应SPI外设后才会拉低。
这里选择手动操作SPI的片选引脚,设置片选信号所在引脚为GPIO输出模式,操作逻辑是:每次在SPI读取MT6701前拉低该引脚,在刚进入读取完成中断时拉高该引脚。

后续使用DMA读取SPI数据,全双工模式下,接收和发送DMA均需要打开:

定时器的配置
- 用于电机速度计算的定时器
首先勾选时钟来自内部时钟源,再创建一个宏定义,用于速度计算间隔。motor_speed_calc_freq是FOC代码里手动设置的宏,speed_calc_freq这个宏给cubemx用,这样就将cubemx的参数与FOC代码里的宏绑定到了一起,好处就是FOC代码与cubemx独立开,FOC代码用于其他厂商单片机不用改太多的代码。

首先设置分频为72-1,72MHz的时钟分频下来后每1us定时器计数加1。定时器计数容量为N时,定时器溢出中断频率是1秒/N微妙=1000000/N赫兹,我们想要定时器溢出中断频率等于motor_speed_calc_freq,那么需要1000000/N=motor_speed_calc_freq,因此这里的计数容量设置为N=1000000/motor_speed_calc_freq。
由于cubemx是不认识motor_speed_calc_freq的,因此这里选择No check不检查参数类型。

开启定时器中断函数,用于计算电机速度:

- 用于产生电机PWM的高级定时器
高级定时器的使用非常关键,非常重要,对于外设配置项的说明请查看前文定时器章节。
stm32f103c8t6只有一个高级定时器:TIM1。
首先选择时钟源,然后开启3个PWM正通道,由于本文使用的集成驱动芯片DRV8313自带互补PWM功能,因此不开启PWM负通道。
这里注意不勾选Activate-Break-Input,这个只是帮你配置刹车引脚的GPIO参数,刹车功能依然是有效的。不勾选的原因是经过我的各种尝试,触发刹车后,依然进不去刹车中断函数TIM1 break interrupt,所以选择自己配置刹车引脚GPIO为外部中断。

手动设置刹车引脚为外部中断,这里不设置也没事,本文代码是因为想要触发刹车后串口打印一下告知刹车被触发了:

开启外部中断函数:

回到高级定时器的配置,再次提醒对于外设配置项的说明请查看前文定时器章节。
- PWM的频率是非常高的,我设置的20KHz,因此不进行预分频。
- 计数方式选择中心对齐方式3。
- 计数容量定义了一个cubemx宏,与FOC代码里的宏进行绑定,这样做可以使得FOC代码独立在各种平台上使用,勾选No check不检查数值类型。数值计算过程:定时器计数不分频情况下,每 1 72 ∗ 1000000 \frac{1}{72*1000000} 72∗10000001秒计数加1,计数容量为N时,计数溢出时间为 N 72000000 \frac{N}{72000000} 72000000N,则计数溢出频率为 72000000 N \frac{72000000}{N} N72000000,而我们设定的计数溢出频率=motor_pwm_freq,即 72000000 N = m o t o r _ p w m _ f r e q \frac{72000000}{N}=motor\_pwm\_freq N72000000=motor_pwm_freq,因此计数容量 N = 72000000 m o t o r _ p w m _ f r e q N=\frac{72000000}{motor\_pwm\_freq} N=motor_pwm_freq72000000。
- 重复计数器设置为4,即每5个定时器溢出产生1个更新事件,更新事件会触发ADC采样,本文FOC代码是放在ADC采样完成中断里计算的,这样FOC代码的计算频率等于20KHz/5=4KHz,这个频率不要太快,因为stm32f103c8t6的算力有限,计算一次FOC代码大约需要120us。
- 输出触发事件来源选择更新事件,自动触发ADC采样。
- BRK State刹车功能可以开启,也可以关闭,建议验证FOC算法阶段先关闭,本文配套硬件有刹车引脚LED灯提示。对应DRV8313的Fault引脚信号,刹车电平选择Low低电平。
- 3个PWM Generation Channel的配置项都相同,默认值刚好是我们想要配置的值。关键项是Mode选择PWM mode 1,因为DRV8313内部是NMOS,所以CH Polarity有效电平是高电平。

ADC的配置
ADC的使用非常关键,非常重要,对于外设配置项的说明请查看前文ADC章节。
使用双ADC同步采样两条电机相线上采样电阻放大后的电压差,首先给ADC1和ADC2分配通道,IN0对应PA0引脚,IN0对应PA1引脚,ADC1是主ADC。

两个ADC都分配好通道后,主ADC的模式下拉框里才会出现同步采样的选项,由于只有注入式采样才能绑定到高级定时器的触发事件,因此选择注入式同步采样。

接下来配置ADC选项:
- 同步采样模式下,一定要开启Continuous连续转换模式。
- 关闭常规采样,打开注入采样。
- 每个ADC只采集一个通道,因此Number Of Conversions设置为1,ADC1的Rank序列中的Channel通道选择通道0,ADC2的Rank序列中的Channel通道选择通道1,采样时间可以设置大一点,我们代码中限制PWM占空比最高为90%即可留出充足的时间给ADC采样。
- 外部触发源选择定时器1的触发事件。


开启ADC采样完成中断,FOC代码会放在这个中断函数里进行:

中断优先级的配置
读取磁编码器SPI的DMA中断优先级设置到最优先,电机角度获取一定要及时准确。
接下来速度计算的定时器中断和运行FOC代码的ADC中断其次,速度计算和FOC代码必须尽量优先。
连到刹车引脚的外部中断优先级放到最低即可,刹车功能在刹车引脚有效时被硬件触发,和中断无关,这个外部中断只是为了串口打印几句消息告知触发刹车了。

生成工程
至此,stm32cubemx相关配置已经完毕,接下来生成keil工程,这里勾选了Generate peripheral initialization as a pair of '.c/.h' files per peripheral,方便功能模块分离。

此时keil工程编译是无法通过的,编译器可能没选到verison 6,而且两个宏motor_speed_calc_freq和motor_pwm_freq我们还没写到代码里。
首先选择编译器为version 6,如果没有出现version 6,你需要下载最新keil版本。

接下来我会使用vscode进行代码编辑,keil用来编译工程和烧录调试代码。
接下来定义motor_speed_calc_freq和motor_pwm_freq。
- 首先在Drivers文件夹下创建motor文件夹,这个文件夹专门用来放置电机FOC驱动代码。
- 然后motor文件夹下创建conf.h,这个文件专门用来放置FOC代码相关的工程配置,将Drivers文件夹添加到头文件路径中。
- 最后在main.h文件的用户代码区把conf.h文件include进来即可将工程编译通过。



在Src/usart.c中定义fputc,方便后续使用printf函数:
//usart.c
/* USER CODE BEGIN 1 */
#include <stdio.h>
int fputc(int c, FILE *stream)
{uint8_t ch[] = {(uint8_t)c};HAL_UART_Transmit(&huart2, ch, 1, HAL_MAX_DELAY);return c;
}
/* USER CODE END 1 */
在Inc文件夹下创建一个全局宏定义文件global_def.h,方便调用:
//global_def.h
#pragma once
#ifndef PI
#define PI 3.14159265358979
#endif
#define deg2rad(a) (PI * (a) / 180)
#define rad2deg(a) (180 * (a) / PI)
#define max(a, b) ((a) > (b) ? (a) : (b))
#define min(a, b) ((a) < (b) ? (a) : (b))
由于本文使用的daplink是低成本版本,为了保证传输稳定性,下载程序的频率选择为1MHz。
工程代码编写
在stm32hal库中,应用逻辑的代码实现变得非常方便,基本规律就是:外设读取+读取完成中断。
FOC代码结构搭建
根据本文硬件情况补充FOC代码里的conf.h:
#pragma once// 电机物理参数:
#define POLE_PAIRS 7 // 极对数// 电路参数:
#define R_SHUNT 0.02 // 电流采样电阻,欧姆
#define OP_GAIN 50 // 运放放大倍数
#define MAX_CURRENT 2 // 最大q轴电流,安培A
#define ADC_REFERENCE_VOLT 3.3 // 电流采样adc参考电压,伏
#define ADC_BITS 12 // ADC精度,bit// 单片机配置参数:
#define motor_pwm_freq 20000 // 驱动桥pwm频率,Hz
#define motor_speed_calc_freq 930 // 电机速度计算频率,Hz// 软件参数:
#define position_cycle 6 * 3.14159265358979 // 电机多圈周期,等于正半周期+负半周期
在Drivers/motor文件夹下创建motor_runtime_param.c和motor_runtime_param.h,用于放置电机运行过程中的各种参数。
关于转子角度和电机角度的区别,前文位置控制说明了一部分,后面内容有代码上的讲解。
//motor_runtime_param.c
#include "motor_runtime_param.h"float motor_i_u;
float motor_i_v;
float motor_i_d;
float motor_i_q;
float motor_speed;
float motor_logic_angle;
float encoder_angle;
float rotor_zero_angle;
//motor_runtime_param.h
#pragma once
#include "conf.h"
#define rotor_phy_angle (motor_logic_angle - rotor_zero_angle) // 转子物理角度
#define rotor_logic_angle rotor_phy_angle *POLE_PAIRS // 转子多圈角度
extern float motor_i_u;
extern float motor_i_v;
extern float motor_i_d;
extern float motor_i_q;
extern float motor_speed;
extern float motor_logic_angle; // 电机多圈角度
extern float encoder_angle; // 编码器直接读出的角度
extern float rotor_zero_angle; // 转子d轴与线圈d轴重合时的编码器角度
在Drivers/motor文件夹下创建foc.c和foc.h,准备用于放置FOC代码。
添加好头文件路径:

添加好C文件:

电机编码器角度读取
从MT6701数据手册可知,SPI数据一共有3个字节:
 采用DMA方式SPI读取3个字节,再取前14位组合成角度值,这里我不使用4bit的Status信息,也不进行crc校验,这不影响角度读取,你可自行运用这些数据提高程序健壮性。
采用DMA方式SPI读取3个字节,再取前14位组合成角度值,这里我不使用4bit的Status信息,也不进行crc校验,这不影响角度读取,你可自行运用这些数据提高程序健壮性。
在Src/spi.c中的USER CODE区域实现读取成功的回调函数,还要实现读取失败的回调函数,每次进入读取完毕函数后立即关闭SPI片选引脚,并且在即将退出回调函数的时候打开SPI片选引脚并启动下一次读取。
//spi.c
/* USER CODE BEGIN 1 */
#include <stdio.h>
#include "motor/motor_runtime_param.h"
#include "motor/foc.h"
#include "arm_math.h"
uint8_t mt6701_rx_data[3];
void HAL_SPI_TxRxCpltCallback(SPI_HandleTypeDef *hspi)
{if (hspi->Instance == SPI1){HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_SET);int angle_raw = (mt6701_rx_data[1] >> 2) | (mt6701_rx_data[0] << 6);encoder_angle = 2 * 3.1415926 * angle_raw / ((1 << 14) - 1);HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_RESET);HAL_SPI_TransmitReceive_DMA(&hspi1, mt6701_rx_data, mt6701_rx_data, 3);return;}
}void HAL_SPI_ErrorCallback(SPI_HandleTypeDef *hspi)
{printf("HAL_SPI_ErrorCallback:%d\n", hspi->ErrorCode);if (hspi->Instance == SPI1){HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_SET);HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_RESET);HAL_SPI_TransmitReceive_DMA(&hspi1, mt6701_rx_data, mt6701_rx_data, 3);}return;
}
/* USER CODE END 1 */
在main函数的while(1)之前调用一次DMA方式的SPI读取,即可自动连续获取角度值,然后在while(1)里面打印一下角度验证一下代码,手动旋转一下电机,结果会在 0 0 0到 2 π 2\pi 2π弧度值之间变化:
//main.c
//......
/* USER CODE BEGIN Includes */
#include <stdio.h>
#include "motor/motor_runtime_param.h"
#include "motor/foc.h"
#include "global_def.h"
/* USER CODE END Includes */
//......
/* USER CODE BEGIN 2 */
extern uint8_t mt6701_rx_data[3];
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_RESET);
HAL_SPI_TransmitReceive_DMA(&hspi1, mt6701_rx_data, mt6701_rx_data, 3);
HAL_Delay(100);//延时一会,让角度变量被赋值,不然角度会是0
/* USER CODE END 2 */
//......
while(1)
{
//....../* USER CODE BEGIN 3 */printf("%f\n", encoder_angle);HAL_Delay(100);
//......
在此再提醒:读取角度的SPI中断优先级一定要最高,否则片选信号可能没有及时关闭,导致角度读取无法接续。
PWM产生
开启PWM输出:
//main.c
//......HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1);HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_2);HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_3);/* USER CODE END 2 */
//......
自己定义一个函数set_pwm_duty,方便设置PWM占空比。htim1.Instance->ARR是定时器计数容量。
有两个细节:
-
限制占空比最高为90%,留出一个电流稳定的时段,有利于减少电机抖动以及给后续ADC采样提供稳定电流时段。原因是:占空比接近100%时,会出现mos关闭后瞬间开启的情况,而且此时是电流通过,导致电流非常不稳定;不必要限制最低占空比,因为q轴为0时,由于SVPWM中的000矢量和111矢量两个零力矩矢量平分了一个PWM周期,因此FOC控制下的PWM最低占空比就是50%。

-
操作3个通道时关闭了中断,防止通道不同步。
//main.c
/* USER CODE BEGIN 0 */
void set_pwm_duty(float d_u, float d_v, float d_w)
{d_u = min(d_u, 0.9);d_v = min(d_v, 0.9);d_w = min(d_w, 0.9);__disable_irq();__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, d_u * htim1.Instance->ARR);__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_2, d_v * htim1.Instance->ARR);__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_3, d_w * htim1.Instance->ARR);__enable_irq();
}
/* USER CODE END 0 */
FOC开环代码编写
FOC开环就是实现一下SVPWM代码,输入目标d轴q轴强度和旋转的目标转子位置,输出电机相线pwm占空比,前文已经实现了SVPWM纯C语言代码,这里将其放到单片机中,也就是要将纯C的数学函数换做CMSIS-DSP里的函数:
//foc.c
#include "foc.h"
#include "arm_math.h"
#include "motor_runtime_param.h"
#include <stdbool.h>
#define rad60 deg2rad(60)
#define SQRT3 1.73205080756887729353
#define deg2rad(a) (PI * (a) / 180)
#define rad2deg(a) (180 * (a) / PI)
#define max(a, b) ((a) > (b) ? (a) : (b))
#define min(a, b) ((a) < (b) ? (a) : (b))static void svpwm(float phi, float d, float q, float *d_u, float *d_v, float *d_w)
{d = min(d, 1);d = max(d, -1);q = min(q, 1);q = max(q, -1);const int v[6][3] = {{1, 0, 0}, {1, 1, 0}, {0, 1, 0}, {0, 1, 1}, {0, 0, 1}, {1, 0, 1}};const int K_to_sector[] = {4, 6, 5, 5, 3, 1, 2, 2};float sin_phi = arm_sin_f32(phi);float cos_phi = arm_cos_f32(phi);float alpha = 0;float beta = 0;arm_inv_park_f32(d, q, &alpha, &beta, sin_phi, cos_phi);bool A = beta > 0;bool B = fabs(beta) > SQRT3 * fabs(alpha);bool C = alpha > 0;int K = 4 * A + 2 * B + C;int sector = K_to_sector[K];float t_m = arm_sin_f32(sector * rad60) * alpha - arm_cos_f32(sector * rad60) * beta;float t_n = beta * arm_cos_f32(sector * rad60 - rad60) - alpha * arm_sin_f32(sector * rad60 - rad60);float t_0 = 1 - t_m - t_n;*d_u = t_m * v[sector - 1][0] + t_n * v[(sector) % 6][0] + t_0 / 2;*d_v = t_m * v[sector - 1][1] + t_n * v[(sector) % 6][1] + t_0 / 2;*d_w = t_m * v[sector - 1][2] + t_n * v[(sector) % 6][2] + t_0 / 2;
}
我将svpwm函数封装一层,命名为foc_forward,传入参数是d轴强度、q轴强度、转子角度,后续闭环计算完毕后也能输入到该函数,得到电机相线pwm占空比。这里创建了一个和set_pwm_duty同名的weak类型函数,这样做是为了提高FOC代码的独立解耦性,编译的时候如果有同名函数,带weak的不会被编译进去。
//foc.c
//......
__attribute__((weak)) void set_pwm_duty(float d_u, float d_v, float d_w)
{while (1);
}
void foc_forward(float d, float q, float rotor_rad)
{float d_u = 0;float d_v = 0;float d_w = 0;svpwm(rotor_rad, d, q, &d_u, &d_v, &d_w);set_pwm_duty(d_u, d_v, d_w);
}
//......
//foc.h
#pragma oncefloat cycle_diff(float diff, float cycle);
void foc_forward(float d, float q, float rotor_rad);
测试一下FOC开环控制,设定d轴强度为0、q轴强度为0.5(不要太高,开环发热)、目标转子在0~360度之间循环转动,此时电机应该就转起来了,由于是开环,电机转起来会抖,而且会发热,不要长时间转。
//main.c
//......
while(1)
{
//....../* USER CODE BEGIN 3 */for (size_t i = 0; i < 360; i += 20){HAL_Delay(2);foc_forward(0, 0.5, deg2rad(i));}
//......
确定电机正负旋转方向
默认情况下,手动逆时针转动电机,MT6701磁编码器的角度是递增的,因此将逆时针旋转设定为角度增加的旋转正方向。有些编码器角度增加的旋转方向是逆时针,这并不唯一。
继续使用上述FOC开环测试代码,传入的q轴是正数,如果电机逆时针转,那么相线顺序是正确的,否则将电机相线取两相对调即可得到正确的相线顺序。
得到正确的相线顺序后,就可以认为UVW三相线分别对应PWM通道123。
电机旋转速度计算
众所周知, 旋转速度 = Δ θ Δ t = Δ θ ∗ 频率 旋转速度=\frac{\Delta \theta}{\Delta t}=\Delta \theta*频率 旋转速度=ΔtΔθ=Δθ∗频率,速度计算频率我们已经设定了宏定义motor_speed_calc_freq,所以在速度定时器中断里的计算过程是:
( 上次编码器角度 − 这次编码器角度 ) ∗ m o t o r _ s p e e d _ c a l c _ f r e q (上次编码器角度-这次编码器角度)*motor\_speed\_calc\_freq (上次编码器角度−这次编码器角度)∗motor_speed_calc_freq
但是代码不能直接这么写,因为:
- 编码器角度位于 0 0 0到 2 π 2\pi 2π之间,359度到1度实际旋转了2度,但是差值是358度,因此计算差值的时候要把差值转换到 − π -\pi −π到 π \pi π之间。
- 算出来的速度需要进行滤波才能给外部用。
下面这个函数能将无符号数映射到一个周期内的有符号数。算角度差值的时候经常会用到,将其放在FOC代码中:
//foc.c
//......
float cycle_diff(float diff, float cycle)
{if (diff > (cycle / 2))diff -= cycle;else if (diff < (-cycle / 2))diff += cycle;return diff;
}
//......
//foc.h
#pragma once
//......
float cycle_diff(float diff, float cycle);
//......
再实现滤波函数,这里使用低通滤波,也可以自行更换为卡尔曼滤波等等。
先创建文件用于放置滤波代码,注意别忘了在keil里加入头文件路径和C文件,这里keil里就不演示了。

再实现低通滤波函数:
//filter.c
float low_pass_filter(float input, float last_output, float alpha)
{return alpha * input + (1.0 - alpha) * last_output;
}
在Src/tim.c实现最终的速度计算代码:
//tim.c
#include "global_def.h"
#include "motor/motor_runtime_param.h"
#include "motor/foc.h"
#include "algorithm/filter.h"
#include "arm_math.h"
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{if (htim->Instance == TIM3){static float encoder_angle_last = 0;/******encoder_angle_last默认值是0,不能用于计算,需要赋初值*********/static int once = 1;if (once){once = !once;encoder_angle_last = encoder_angle;}/***************/float diff_angle = cycle_diff(encoder_angle - encoder_angle_last, 2 * PI);encoder_angle_last = encoder_angle;float _motor_speed = diff_angle * motor_speed_calc_freq;float filter_alpha_speed = 0.1;//低通滤波参数,如果希望保留更多的细节,可以增加alpha的值motor_speed = low_pass_filter(_motor_speed, motor_speed, filter_alpha_speed);}
}
在main.c中开启速度计算定时器:
//......
HAL_TIM_Base_Start_IT(&htim3);
/* USER CODE END 2 */
//......
测试一下速度计算是否有效,继续使用FOC开环测试代码,不要转太长时间,开环控制会发热:
//main.c
//......
while(1)
{
//....../* USER CODE BEGIN 3 */for (size_t i = 0; i < 360; i += 20){HAL_Delay(2);foc_forward(0, 0.5, deg2rad(i));printf("%f\n", motor_speed);}
//......
多圈逻辑角度
从MT6701编码器是 0 0 0到 2 π 2\pi 2π周期变化的,只有单圈,但我们想要多圈角度时,需要自行将每次的角度差值累计起来,即累计(当前角度-上次角度)。
逻辑角度是手动累计的,因此更新及时性是取决与放在哪里累计的。如果放在SPI读取角度中断里,那么和编码器角度一样的更新及时;如果放在其他中断里,比如速度计算定时器中断、ADC采样完成中断,按照本文设置,则逻辑角度更新速度等于速度计算频率=930Hz,ADC中断=4KHz。更新及时性超过SPI读取角度中断频率是没有意义的。本文选择放在SPI读取角度中断里累计。
这里对逻辑角度进行了周期操作,半周期是position_cycle,比如按照度数表达,如果半周期设置为360度、当前逻辑角度是358度,再转3度后,逻辑角度等于-359度。如果你的逻辑角度是非常非常多圈,并且你自信电机实际旋转需求不会超出浮点数可表达的最大值,可以不需要周期操作。
补充SPI读取角度中断:
//spi.c
//......
void HAL_SPI_TxRxCpltCallback(SPI_HandleTypeDef *hspi)
{if (hspi->Instance == SPI1){HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_SET);int angle_raw = (mt6701_rx_data[1] >> 2) | (mt6701_rx_data[0] << 6);encoder_angle = 2 * 3.1415926 * angle_raw / ((1 << 14) - 1);static float encoder_angle_last = 0;/****encoder_angle_last默认值是0,不能用于计算,要先赋值一次****/static int once = 1;if (once){once = !once;encoder_angle_last = encoder_angle;}/*************/float _encoder_angle = encoder_angle;// 角度差值,用于累计多圈逻辑角度float diff_angle = cycle_diff(_encoder_angle - encoder_angle_last, 2 * PI);encoder_angle_last = _encoder_angle;// 实现周期操作,将motor_logic_angle转到周期内motor_logic_angle = cycle_diff(motor_logic_angle + diff_angle, position_cycle);HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_RESET);HAL_SPI_TransmitReceive_DMA(&hspi1, mt6701_rx_data, mt6701_rx_data, 3);return;}
}
//......
在主函数里打印一下逻辑角度,用手转动电机几圈,看看逻辑角度是否有效:
//main.c
//......
while(1)
{
printf("%f\n", motor_logic_angle);
/* USER CODE END WHILE */
//......
从角度结果可以看到逻辑角度具有多圈周期性:

电流采样
电机相线上的电流采样电阻两端电压经过放大器放大后,输入单片机ADC口。
本文会将正式的FOC实时计算代码放在ADC采样完成中断里(大部分驱动代码都会这么做,当然放在角度读取完成中断里也是可行的),因此无论是否读取ADC值,这个中断函数必须要开放实现的。
进行ADC采样之前,先校准,然后开始采样。由于ADC采样绑定了高级定时器的输出事件,后续的ADC采样会自动被高级定时器触发。
//main.c
//......HAL_ADCEx_Calibration_Start(&hadc1);HAL_ADCEx_Calibration_Start(&hadc2);HAL_ADCEx_InjectedStart_IT(&hadc1);HAL_ADCEx_InjectedStart(&hadc2);/* USER CODE END 2 */
//......
在ADC采样完成中断函数里读取ADC值,INA199放大器系列的ADC值会在1.65V上下变动,1.65V代表采样电阻两端电压为0V,大于1.65V代表采样电阻两端电压为正数,小于1.65V代表采样电阻两端电压为负数,相线电流等于 A D C 值 − 1.65 V 放大倍数 ÷ 采样电阻值 \frac{ADC值-1.65V}{放大倍数}\div采样电阻值 放大倍数ADC值−1.65V÷采样电阻值。
这里最好验证一下ADC值的正负以及是否正好对应PWM通道123,先假设PWM通道1对应ADC1,PWM通道2对应ADC2,则假设U相电流等于ADC1计算得到的电流,V相电流等于ADC2计算得到的电流,W相电流根据基尔霍夫电流总和为0的定律等于: − ( U 相电流 + V 相电流 ) -(U相电流+V相电流) −(U相电流+V相电流):
//adc.c
//......
#include "motor/motor_runtime_param.h"
#include "motor/foc.h"
#include "algorithm/filter.h"
#include "global_def.h"
#include "arm_math.h"
void HAL_ADCEx_InjectedConvCpltCallback(ADC_HandleTypeDef *hadc)
{if (hadc->Instance == ADC1){float u_1 = ADC_REFERENCE_VOLT * ((float)HAL_ADCEx_InjectedGetValue(&hadc1, ADC_INJECTED_RANK_1) / ((1 << ADC_BITS) - 1) - 0.5);float u_2 = ADC_REFERENCE_VOLT * ((float)HAL_ADCEx_InjectedGetValue(&hadc2, ADC_INJECTED_RANK_1) / ((1 << ADC_BITS) - 1) - 0.5);float i_1= u_1 / R_SHUNT / OP_GAIN;float i_2 = u_2 / R_SHUNT / OP_GAIN;motor_i_u = i_1;motor_i_v = i_2;}
}
如果3个PWM通道正对应ADC1和ADC2,那么打开PWM通道1,关闭PWM通道2、3的时候,ADC1这条路会得到一个对应的正电流值,如下图所示:
按照这个思想验证一下:
//main.c
//....../* USER CODE BEGIN WHILE */set_pwm_duty(0.5, 0, 0);HAL_Delay(300);printf("%f,%f,%f\n", motor_i_u, motor_i_v, -(motor_i_u + motor_i_v));set_pwm_duty(0, 0.5, 0);HAL_Delay(300);printf("%f,%f,%f\n", motor_i_u, motor_i_v, -(motor_i_u + motor_i_v));set_pwm_duty(0, 0, 0.5);HAL_Delay(300);printf("%f,%f,%f\n", motor_i_u, motor_i_v, -(motor_i_u + motor_i_v));set_pwm_duty(0, 0, 0);while (1){
//......
如果得到类似下图的结果,三个电流正值都差不多,也是分别出现在第1、2、3个,那么说明ADC1和ADC2正对应PWM通道1和2,而且正负方向也是正确的,否则就需要调整motor_i_u = i_1;和motor_i_v = i_2;代码,重新排列正确的对应关系。

再根据3个相电流换算到d轴和q轴电流,即clark变换和park变换,理论部分请参考前文电流控制,然后进行滤波操作。如果你不想使用力矩环,d轴和q轴电流无需计算。ADC中断代码补充为:
void HAL_ADCEx_InjectedConvCpltCallback(ADC_HandleTypeDef *hadc)
{if (hadc->Instance == ADC1){float u_1 = ADC_REFERENCE_VOLT * ((float)HAL_ADCEx_InjectedGetValue(&hadc1, ADC_INJECTED_RANK_1) / ((1 << ADC_BITS) - 1) - 0.5);float u_2 = ADC_REFERENCE_VOLT * ((float)HAL_ADCEx_InjectedGetValue(&hadc2, ADC_INJECTED_RANK_1) / ((1 << ADC_BITS) - 1) - 0.5);float i_1 = u_1 / R_SHUNT / OP_GAIN;float i_2 = u_2 / R_SHUNT / OP_GAIN;motor_i_u = i_1;motor_i_v = i_2;float i_alpha = 0;float i_beta = 0;arm_clarke_f32(motor_i_u, motor_i_v, &i_alpha, &i_beta);float sin_value = arm_sin_f32(rotor_logic_angle);float cos_value = arm_cos_f32(rotor_logic_angle);float _motor_i_d = 0;float _motor_i_q = 0;arm_park_f32(i_alpha, i_beta, &_motor_i_d, &_motor_i_q, sin_value, cos_value);float filter_alpha_i_d = 0.1;float filter_alpha_i_q = 0.1;motor_i_d = low_pass_filter(_motor_i_d, motor_i_d, filter_alpha_i_d);motor_i_q = low_pass_filter(_motor_i_q, motor_i_q, filter_alpha_i_q);}
}
极对数
前文理论部分一直使用的是简单模型,即转子看成一根直的磁铁,实际电机的转子磁铁排布可能如下图,这是本文使用的电机示意图,一共有14个(7对)磁极,即极对数为7。

极对数为7的电机完成7次相线换相周期后,电机才会旋转一圈。也就是说用于FOC计算的转子逻辑角度=极对数*转子物理角度。
转子角度确定
注意这里称为【转子】角度。
FOC模型是建立在电机转子基础上的,d轴q轴相关计算是按照转子角度计算的,而我们能直接获取的是磁编码器角度,也就是电机外壳角度,因为磁铁粘在电机外壳上,磁编码器感应磁铁角度。
这就出现了一个问题,转子零度与磁编码器零度之间差了多少度?解决了这个问题,那么转子角度就可知了,即等于磁编码器角度减去这个偏差角度。
其中一个简单方法是:电机上电后,控制相线形成磁场,将转子d轴吸引到转子零度的位置,然后读取磁编码器数据,这个角度就是偏差角度,叫做d轴强拖。
用代码实现这个方法:
//main.c
//......set_pwm_duty(0.5, 0, 0); // 生成SVPWM模型中的基础矢量1,即对应转子零度位置HAL_Delay(400); // 保持一会,转子吸引过来需要时间rotor_zero_angle = motor_logic_angle; // 读取磁编码器数据,刚上电,用逻辑角度也可以set_pwm_duty(0, 0, 0); // 松开电机HAL_Delay(10);/* USER CODE END 2 */
//......
前面在motor_runtime_param.h里设置的宏定义帮我们完成了转子角度的计算:#define rotor_logic_angle rotor_phy_angle *POLE_PAIRS
闭环控制
这个部分编写位置环、速度环、电流环代码。FOC闭环控制代码将放在ADC采样中断中进行。
控制函数接口定义
控制函数接口要符合人的直觉,让人可以直观地调用,先定义函数接口,再逐步补充这些函数:
//foc.h
//......
void lib_position_control(float rad);
void lib_speed_control(float speed);
void lib_torque_control(float torque_norm_d, float torque_norm_q);
void lib_position_speed_torque_control(float position, float max_speed, float max_torque_norm);
//......
先这么放着,后面会补充内容:
//foc.c
//......
void lib_position_control(float rad)
{
}void lib_speed_control(float speed)
{
}void lib_torque_control(float torque_norm_d, float torque_norm_q)
{
}void lib_speed_torque_control(float speed_rad, float max_torque_norm)
{
}void lib_position_speed_torque_control(float position_rad, float max_speed_rad, float max_torque_norm)
{
}
//......
力矩控制包括d轴和q轴强度。
上述定义的接口意思是实时计算一次电机相线pwm输出占空比,这是FOC核心算法,因此需要不断调用上述接口以及时更新输出占空比。
为了让后续功能性的代码更加容易编写,再对这个接口封装一层。这里创建了一个结构体变量,用于方便后续程序上的使用,你也可以不封装上述接口,直接反复调用上述接口也是可以的。
//foc.h
//......
typedef enum
{control_type_null, // 不进行控制control_type_position, // 位置控制control_type_speed, // 速度控制control_type_torque, // 力矩控制control_type_position_speed_torque, // 位置-速度-力矩控制
} motor_control_type;typedef struct
{motor_control_type type;float position; // 目标角度,单位radfloat speed; // 目标速度,单位rad/sfloat torque_norm_d; // 目标d轴强度,0~1float torque_norm_q; // 目标q轴强度,0~1float max_speed; // 串级控制时的最大速度,单位rad/sfloat max_torque_norm; // 串级控制时的最大q轴力矩,0~1
} motor_control_context_t;extern motor_control_context_t motor_control_context;
//......
有了这个封装后的结构体变量后,就可以在ADC中断里不断扫描这个结构体变量从而不断调用对应的FOC控制函数接口,在主代码里对这个结构体变量赋值即可。
//adc.c
//......
void HAL_ADCEx_InjectedConvCpltCallback(ADC_HandleTypeDef *hadc)
{if (hadc->Instance == ADC1){float u_1 = ADC_REFERENCE_VOLT * ((float)HAL_ADCEx_InjectedGetValue(&hadc1, ADC_INJECTED_RANK_1) / ((1 << ADC_BITS) - 1) - 0.5);float u_2 = ADC_REFERENCE_VOLT * ((float)HAL_ADCEx_InjectedGetValue(&hadc2, ADC_INJECTED_RANK_1) / ((1 << ADC_BITS) - 1) - 0.5);float i_1 = u_1 / R_SHUNT / OP_GAIN;float i_2 = u_2 / R_SHUNT / OP_GAIN;motor_i_u = i_1;motor_i_v = i_2;float i_alpha = 0;float i_beta = 0;arm_clarke_f32(motor_i_u, motor_i_v, &i_alpha, &i_beta);float sin_value = arm_sin_f32(rotor_logic_angle);float cos_value = arm_cos_f32(rotor_logic_angle);float _motor_i_d = 0;float _motor_i_q = 0;arm_park_f32(i_alpha, i_beta, &_motor_i_d, &_motor_i_q, sin_value, cos_value);float filter_alpha_i_d = 0.1;float filter_alpha_i_q = 0.1;motor_i_d = low_pass_filter(_motor_i_d, motor_i_d, filter_alpha_i_d);motor_i_q = low_pass_filter(_motor_i_q, motor_i_q, filter_alpha_i_q);switch (motor_control_context.type){case control_type_position:lib_position_control(motor_control_context.position);break;case control_type_speed:lib_speed_control(motor_control_context.speed);break;case control_type_torque:lib_torque_control(motor_control_context.torque_norm_d, motor_control_context.torque_norm_q);break;case control_type_position_speed_torque:lib_position_speed_torque_control(motor_control_context.position, motor_control_context.max_speed, motor_control_context.max_torque_norm);break;default:break;}}
}
//......
以位置控制为例,目标位置是90度,封装接口后的调用方式就变为:
//main.c
//....../* USER CODE BEGIN WHILE */motor_control_context.position = deg2rad(90);motor_control_context.type = control_type_position;while (1){
//......
CMSIS-DSP提供的PID控制器
CMSIS-DSP数学库中提供了一个PID控制器,变量类型是arm_pid_instance_f32,将其用在我们的闭环控制中。使用方法是先调用arm_pid_init_f32配置PID系数,在闭环控制时使用arm_pid_f32计算输出PID输出值。该部分可以参考前文CMSIS-DSP。
设计一个函数,给位置环、速度环、电流环分别创建pid控制器:
//foc.c
//......
static arm_pid_instance_f32 pid_position;
static arm_pid_instance_f32 pid_speed;
static arm_pid_instance_f32 pid_torque_d;
static arm_pid_instance_f32 pid_torque_q;
void set_motor_pid(float position_p, float position_i, float position_d,float speed_p, float speed_i, float speed_d,float torque_d_p, float torque_d_i, float torque_d_d,float torque_q_p, float torque_q_i, float torque_q_d)
{pid_position.Kp = position_p;pid_position.Ki = position_i;pid_position.Kd = position_d;pid_speed.Kp = speed_p;pid_speed.Ki = speed_i;pid_speed.Kd = speed_d;pid_torque_d.Kp = torque_d_p;pid_torque_d.Ki = torque_d_i;pid_torque_d.Kd = torque_d_d;pid_torque_q.Kp = torque_q_p;pid_torque_q.Ki = torque_q_i;pid_torque_q.Kd = torque_q_d;arm_pid_init_f32(&pid_position, false);//false代表清空内部增量数据arm_pid_init_f32(&pid_speed, false);arm_pid_init_f32(&pid_torque_d, false);arm_pid_init_f32(&pid_torque_q, false);
}
//......
//foc.h
//......
void set_motor_pid(float position_p, float position_i, float position_d,float speed_p, float speed_i, float speed_d,float torque_d_p, float torque_d_i, float torque_d_d,float torque_q_p, float torque_q_i, float torque_q_d);
//......
在main.c中配置pid系数,先设置为0,后续调参过程中会反复修改这里的参数。
//main.c
//....../* USER CODE BEGIN 2 */set_motor_pid(0, 0, 0,0, 0, 0,0, 0, 0,0, 0, 0);
//......
位置控制
位置环的角度差值注意要使用cycle_diff函数进行周期化,因为角度是有周期的,这里使用逻辑角度以便可以多圈控制。
差值到底是rad - motor_logic_angle还是motor_logic_angle - rad呢?你可以这样想,如果真实角度motor_logic_angle是100度,输入目标角度rad是150度,pid控制器需要输出正数才能让电机转向目标角度,因此pid控制器也需要输入正数,因此只有rad - motor_logic_angle才是得到正数。
position_loop函数是干嘛用的?它有输入和输出,可以和速度环、力矩环串起来,因此单独隔离出一个函数方便控制环之间的串联。
d轴是不提供转向力矩的,对位置环没有用,因此目标d轴强度设置为0。
foc_forward开环控制在这里又用起来了,这个函数的本质是将目标d轴q轴强度落实到电机相线pwm通道上。
后续的速度环和位置环同理。
//foc.c
//......
static float position_loop(float rad)
{float diff = cycle_diff(rad - motor_logic_angle, position_cycle);return arm_pid_f32(&pid_position, diff);
}void lib_position_control(float rad)
{float d = 0;float q = position_loop(rad);foc_forward(d, q, rotor_logic_angle);
}
//......
速度控制
速度是没有周期的,所以不需要使用cycle_diff函数周期化差值。
//foc.c
//......
static float speed_loop(float speed_rad)
{float diff = speed_rad - motor_speed;return arm_pid_f32(&pid_speed, diff);
}
void lib_speed_control(float speed)
{float d = 0;float q = speed_loop(speed);foc_forward(d, q, rotor_logic_angle);
}
//......
力矩(电流)控制
d轴和q轴都有力矩环,将d轴和q轴电流与宏定义设定的最大电流的比例看作【力矩强度】,力矩环输入的是0到1之间的百分比强度数据。
//foc.c
//......
static float torque_d_loop(float d)
{float diff = d - motor_i_d / MAX_CURRENT;return arm_pid_f32(&pid_torque_d, diff);
}static float torque_q_loop(float q)
{float diff = q - motor_i_q / MAX_CURRENT;return arm_pid_f32(&pid_torque_q, diff);
}void lib_torque_control(float torque_norm_d, float torque_norm_q)
{float d = torque_d_loop(torque_norm_d);float q = torque_q_loop(torque_norm_q);foc_forward(d, q, rotor_logic_angle);
}
//......
位置-速度-力矩控制
将位置环、速度环、力矩环串联起来,就是【位置-速度-力矩控制】。可前往查看前文位置、速度、电流控制的控制框图。
位置-速度-力矩联合控制的时候,主角是还是位置环,速度、力矩是运行过程中的最大值,比如:输入的速度是30rad/s,意思是电机角度到位过程中的速度按照30rad/s进行控制,角度到位后,电机速度会按照0rad/s进行控制。
这里的代码抽出了速度-力矩控制作为一个单独的函数,这样既开放了【速度-力矩控制】的接口,也可以被【位置-速度-力矩控制】调用。
//foc.c
//......
void lib_speed_torque_control(float speed_rad, float max_torque_norm)
{float torque_norm = speed_loop(speed_rad);torque_norm = min(fabs(torque_norm), max_torque_norm) * (torque_norm > 0 ? 1 : -1);lib_torque_control(0, torque_norm);
}void lib_position_speed_torque_control(float position_rad, float max_speed_rad, float max_torque_norm)
{float speed_rad = position_loop(position_rad);speed_rad = min(fabs(speed_rad), max_speed_rad) * (speed_rad > 0 ? 1 : -1);lib_speed_torque_control(speed_rad, max_torque_norm);
}
//......
PID系数调节
到目前位置,已经在ADC中断中放置了FOC代码,也在main.c中设置好了闭环控制类型(示例是位置控制),只要再设置好PID系数,电机就能进行闭环动作了。PID系数调节比较依靠经验,由于本人能力有限,我无法深入讲解,网上有大量的PID系数调节教程。
- 位置环
本文选择的电机是云台电机,这里的位置环的PID系数只用到P系数和D系数,可以在主while(1)循环里打印电机实时角度辅助调节。
首先设定为位置控制模式,由于FOC代码里位置控制是按照逻辑角度进行控制的,因此这里设置的90度是逻辑角度:
//main.c
//....../* USER CODE BEGIN WHILE */motor_control_context.position = deg2rad(90);motor_control_context.type = control_type_position;while (1){printf("%f\n", motor_logic_angle);/* USER CODE END WHILE */
//......
调节P系数建议从2开始,0.1为步距往上调整,直到电机到位过程中出现轻微位置弹簧感:

然后设定D系数,建议从5开始,1为步距往上调,直到弹簧感消失,这样一个归位迅速而回弹轻微的位置环就调节好了:

- 速度环
调节转速环的时候,转速滤波系数filter_alpha_speed非常重要,决定了计算出来的速度是否平稳,本文使用的低通滤波,如果想要滤波平稳一点,那么就会有滞后,如果想要速度更新及时一点,那么滤波结果波动就大,这个转速滤波的参数也是需要自己调节测试的,我为了验证FOC算法,设定的0.07,滞后比较厉害,但是速度滤波出来比较平稳。
在主while(1)前设定FOC为速度控制模式:
//main.c
//....../* USER CODE BEGIN WHILE */motor_control_context.speed = 20 * 2 * PI;motor_control_context.type = control_type_position;while (1){printf("%f\n", motor_speed);/* USER CODE END WHILE */
//......
速度环主要是使用P系数和I系数,速度波动比较剧烈,D系数干扰大。P系数要给的非常小,建议从0.01开始,步距0.001往上调节,I系数从0.001开始往上调节。
经过我简单的调节,本文选用的电机在空载时,在速度环模式下,速度大概能到每秒122.6弧度(每秒39转,每分钟1171转)左右。

- 力矩环
力矩环同样有滤波系数filter_alpha_i_d和filter_alpha_i_q,分别对应d轴电流和q轴电流滤波,我为了验证FOC算法,这两个参数设置的0.1。
在主while(1)前设定FOC为力矩控制模式:
//main.c
//....../* USER CODE BEGIN WHILE */motor_control_context.torque_norm_d = 0;motor_control_context.torque_norm_q = 1;motor_control_context.type = control_type_torque;while (1){printf("%f\n", motor_speed);/* USER CODE END WHILE */
//......
经过我简单的调节,本文选用的电机在空载时,在力矩环模式下,速度大概能到每秒145.6弧度(每秒23转,每分钟1391转)左右。

- 位置-速度-力矩串级PID
三者串级控制的时候,不能直接使用单独控制时的PID系数,需要重新调节,要从最内环开始串级调节到最外环,即先调好力矩控制,再调好速度-力矩控制,再调好位置-速度-力矩控制。
注意点
- 注意调试过程中打断点或者点击Stop Debug的时候,不要暂停时间过长,因为暂停的时候电机相线的pwm占空比也固定住了,如果某一相的占空比刚好固定在非常高的状态,会导致电机迅速发热。
- stm32f103系列的算力有限,keil编译的时候请开启-O3优化,否则可能需要再降低SPI频率或者提高高级定时器重复计数器以降低FOC代码计算频率。
至此已经完成了从零开始实现stm32无刷电机FOC,本文源码开源,可前往查看:https://gitee.com/best_pureer/stm32_foc。
相关文章:
【从零开始实现stm32无刷电机FOC】【实践】【7.2/7 完整代码编写】
目录 stm32cubemx配置芯片选择工程配置stm32基础配置SPI的配置定时器的配置ADC的配置中断优先级的配置生成工程 工程代码编写FOC代码结构搭建电机编码器角度读取PWM产生FOC开环代码编写确定电机正负旋转方向电机旋转速度计算多圈逻辑角度电流采样极对数转子角度确定 闭环控制控…...

谷歌收录查询工具,谷歌收录查询工具的使用指南
谷歌收录查询工具是网站管理员和SEO专业人士用于检查网站是否被谷歌搜索引擎收录及其收录情况的重要辅助手段。以下是一些常用的谷歌收录查询工具及其详细使用指南: 一、Google Search Console(谷歌搜索控制台) 简介: Google Sea…...
)
vue3 拖拽插件(drag)
前端vue项目中,经常会有弹框拖拽的需求,下面介绍常用方法: 1.如果你使用的是elementPlus插件的el-dialog组件,只需要增加draggable属性即可,代码如下: <el-dialogv-model"showDiloag"width"500&quo…...

数据结构--线性表(顺序结构)
1.线性表的定义和基本操作 1.1线性表以及基本逻辑 1.1.1线性表 (1)n(>0)个数据元素的有限序列,记作(a1,a2,...an),其中ai是线性表中的数据元素,n是表的长度。 (2)…...

面试准备111
Java基础 反射 集合 多线程 Synchronized/volatile 线程池 cas atomic 网络 tcp 三次握手/四次挥手 流量控制 拥塞控制 数据结构 算法 Spring 循环依赖 Mybatis 如何防止sql注入 Mysql 索引 索引分类 索引设计原则 事务 四种隔离级别 MVCC 日志 Binlog…...

Spring 的 IOC 和 AOP 是什么,有哪些优点?解密 Spring两大核心概念:IOC与AOP的魅力所在
在现代Java开发中,Spring框架几乎是不可或缺的存在。它不仅简化了开发过程,还提高了软件的灵活性和可维护性。今天,我们要深入探讨Spring中的两个核心概念:IOC(控制反转)和AOP(面向切面编程&…...

第二百六十四节 JPA教程 - JPA查询日期参数示例
JPA教程 - JPA查询日期参数示例 我们可以在查询中使用日期类型值。 以下代码使用EntityManager创建具有两个参数的查询。 然后它传递两个日期类型值。 em.createQuery("SELECT e " "FROM Professor e " "WHERE e.startDate BETWEEN :start AND :en…...

Spring MVC的运行流程详解
Spring MVC作为一个广泛使用的框架,提供了灵活且强大的MVC架构支持。尤其在业务系统中,Spring MVC能够有效地处理大量并发请求,提供良好的用户体验。本文将详细讲解Spring MVC的运行流程,以电商交易系统为案例,帮助读者…...

判断有向图是否为单连通图的算法
判断有向图是否为单连通图的算法 算法描述伪代码C语言实现解释在图论中,单连通图(singly connected graph)是指对于图中的任意两个顶点 m 和 v,如果存在从 m 到 v 的路径,则该路径是唯一的。为了判断一个有向图是否为单连通图,我们需要确保从任意顶点出发,到任意其他顶点…...

php与python建站的区别有哪些
php与Python建站的区别: 1、语言层面Python的特性比php好,更加规范。 2、Python的性能比php高。 3、有只需要启动服务的时候执行一次的代码,在php里每个请求都会被执行一次,Python不需要。虽然php可以通过缓存缩短这方面的差距…...

模型评估与验证:确保模型在未知数据上的表现----示例:使用K折交叉验证评估分类模型、房价预测问题使用K折交叉验证来评估一个线性回归模型的性能
模型评估与验证是机器学习流程中的关键步骤,它帮助我们了解模型在未见过的数据上的泛化能力。交叉验证(Cross-Validation, CV)是一种常用的技术,通过将数据集划分为多个子集并进行多次训练和测试来估计模型的性能。此外࿰…...

awd基础学习
一、常用防御手段 1、改ssh密码 passwd [user] 2、改数据库密码 进入数据库 mysql -uroot -proot 改密码 update mysql.user set passwordpassword(新密码) where userroot; 查看用户信息密码 select host,user,password from mysql.user; 改配置文件 (否则会宕机…...

C#基于SkiaSharp实现印章管理(10)
向PDF文件插入印章图片比之前实现的向图片文件插入印章麻烦得多。 最初的想法是使用PDF浏览控件在线打开PDF文件,然后在控件中实现鼠标移动时动态显示印章,点击鼠标时向当前PDF页面的鼠标点击位置插入图片。由于是.net 8的Winform项目,选…...

通过栈实现字符串中查找是否有指定字符串的存在
题目示例: 分析 由与没有给出字符串的长度,所以只能通过getline一次性处理,而在输入后恰好能倒序处理字符串,以标点符号为分界点,将数字当成字符放到栈里,遇到下一个标点符号时执行查找操作,…...

MongoDB伪分布式部署(mac M2)
1. 序言 本博客是上一博客的进阶版:mac M2安装单机版 MongoDB 7.x,上一博客可以看做是单机、单节点部署MongoDB本博客将介绍单机、多服务部署MongoDB,实际就是伪分布式部署 2. 副本集(Replica Set)方式部署 2.1 什么是副本集? …...

Golang | Leetcode Golang题解之第454题四数相加II
题目: 题解: func fourSumCount(a, b, c, d []int) (ans int) {countAB : map[int]int{}for _, v : range a {for _, w : range b {countAB[vw]}}for _, v : range c {for _, w : range d {ans countAB[-v-w]}}return }...

[ComfyUI]Flux:超美3D微观山水禅意,经典中文元素AI重现,佛陀楼阁山水画卷
在数字艺术和创意领域,[ComfyUI]Flux以其独特的虚实结合技术,已经成为艺术家和设计师们手中的利器。今天,我们激动地宣布,[ComfyUI]Flux带来了一款超美的3D微观山水禅意作品,经典中文元素通过AI技术重现,包…...

Linux 系统 nvm 管理node无法使用
文章目录 一、报错说明二、报错原因三、解决办法四、验证 一、报错说明 centos7服务器使用nvm安装的node之后,只要使用npm或者node,均会出现以下问题。 npm -v node: /lib64/libm.so.6: version GLIBC_2.27 not found (required by node) node: /lib64…...

信号处理快速傅里叶变换(FFT)的学习
FFT是离散傅立叶变换的快速算法,可以将一个信号变换到频域。有些信号在时域上是很难看出什么特征的,但是如果变换到频域之后,就很容易看出特征了。这就是很多信号分析采用FFT变换的原因。另外,FFT可以将一个信号的频谱提取出来&am…...

vue3项目el-table表格行内编辑加输入框校验
核心点 1. el-form的model属性需要跟el-form-item的prop要对应 2. el-form的model属性绑定tableData 3. el-form-item的prop绑定字符串:scope.index.列名(注意有个点) 4. el-form-item需要单独设置rules属性 代码示例 <el-form :mod…...

AI Agent与Agentic AI:原理、应用、挑战与未来展望
文章目录 一、引言二、AI Agent与Agentic AI的兴起2.1 技术契机与生态成熟2.2 Agent的定义与特征2.3 Agent的发展历程 三、AI Agent的核心技术栈解密3.1 感知模块代码示例:使用Python和OpenCV进行图像识别 3.2 认知与决策模块代码示例:使用OpenAI GPT-3进…...

初学 pytest 记录
安装 pip install pytest用例可以是函数也可以是类中的方法 def test_func():print()class TestAdd: # def __init__(self): 在 pytest 中不可以使用__init__方法 # self.cc 12345 pytest.mark.api def test_str(self):res add(1, 2)assert res 12def test_int(self):r…...
)
Android第十三次面试总结(四大 组件基础)
Activity生命周期和四大启动模式详解 一、Activity 生命周期 Activity 的生命周期由一系列回调方法组成,用于管理其创建、可见性、焦点和销毁过程。以下是核心方法及其调用时机: onCreate() 调用时机:Activity 首次创建时调用。…...

代码随想录刷题day30
1、零钱兑换II 给你一个整数数组 coins 表示不同面额的硬币,另给一个整数 amount 表示总金额。 请你计算并返回可以凑成总金额的硬币组合数。如果任何硬币组合都无法凑出总金额,返回 0 。 假设每一种面额的硬币有无限个。 题目数据保证结果符合 32 位带…...

20个超级好用的 CSS 动画库
分享 20 个最佳 CSS 动画库。 它们中的大多数将生成纯 CSS 代码,而不需要任何外部库。 1.Animate.css 一个开箱即用型的跨浏览器动画库,可供你在项目中使用。 2.Magic Animations CSS3 一组简单的动画,可以包含在你的网页或应用项目中。 3.An…...
基于SpringBoot在线拍卖系统的设计和实现
摘 要 随着社会的发展,社会的各行各业都在利用信息化时代的优势。计算机的优势和普及使得各种信息系统的开发成为必需。 在线拍卖系统,主要的模块包括管理员;首页、个人中心、用户管理、商品类型管理、拍卖商品管理、历史竞拍管理、竞拍订单…...
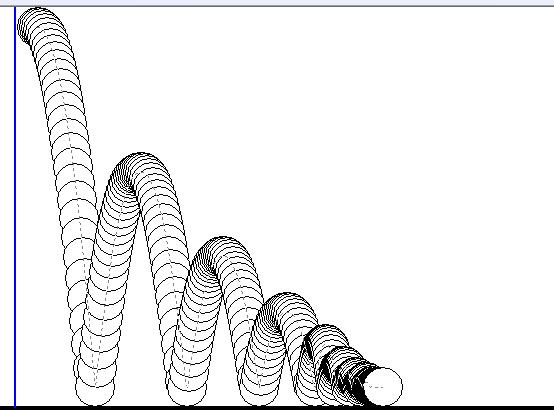
MFC 抛体运动模拟:常见问题解决与界面美化
在 MFC 中开发抛体运动模拟程序时,我们常遇到 轨迹残留、无效刷新、视觉单调、物理逻辑瑕疵 等问题。本文将针对这些痛点,详细解析原因并提供解决方案,同时兼顾界面美化,让模拟效果更专业、更高效。 问题一:历史轨迹与小球残影残留 现象 小球运动后,历史位置的 “残影”…...

JS手写代码篇----使用Promise封装AJAX请求
15、使用Promise封装AJAX请求 promise就有reject和resolve了,就不必写成功和失败的回调函数了 const BASEURL ./手写ajax/test.jsonfunction promiseAjax() {return new Promise((resolve, reject) > {const xhr new XMLHttpRequest();xhr.open("get&quo…...
打手机检测算法AI智能分析网关V4守护公共/工业/医疗等多场景安全应用
一、方案背景 在现代生产与生活场景中,如工厂高危作业区、医院手术室、公共场景等,人员违规打手机的行为潜藏着巨大风险。传统依靠人工巡查的监管方式,存在效率低、覆盖面不足、判断主观性强等问题,难以满足对人员打手机行为精…...
mac:大模型系列测试
0 MAC 前几天经过学生优惠以及国补17K入手了mac studio,然后这两天亲自测试其模型行运用能力如何,是否支持微调、推理速度等能力。下面进入正文。 1 mac 与 unsloth 按照下面的进行安装以及测试,是可以跑通文章里面的代码。训练速度也是很快的。 注意…...