自动泊车端到端算法 ParkingE2E 介绍
01 算法介绍
自主泊车是智能驾驶领域中的一项关键任务。传统的泊车算法通常使用基于规则的方案来实现。因为算法设计复杂,这些方法在复杂泊车场景中的有效性较低。
相比之下,基于神经网络的方法往往比基于规则的方法更加直观和多功能。通过收集大量专家泊车轨迹数据,基于学习的仿人策略方法,可以有效解决泊车任务。
在本文中,我们采用模仿学习来执行从 RGB 图像到路径规划的端到端规划,模仿人类驾驶轨迹。我们提出的端到端方法利用目标查询编码器来融合图像和目标特征,并使用基于 Transformer 的解码器自回归预测未来的航点。
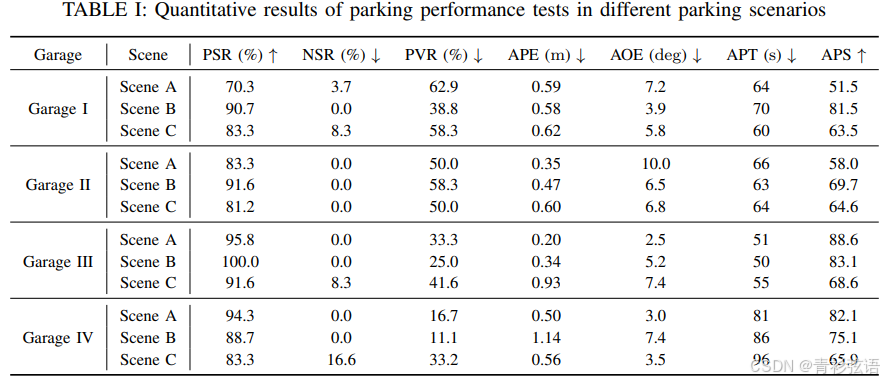
我们在真实世界场景中进行了广泛的实验,结果表明,我们提出的方法在四个不同的真实车库中平均泊车成功率达到了 87.8%。实车实验进一步验证了本文提出方法的可行性和有效性。
输入:1.去完畸变的 RGB 图 2.目标停车位
输出:路径规划
论文精读博客参考链接:https://blog.csdn.net/qq_45933056/article/details/140968352
源代码:https://github.com/qintonguav/ParkingE2E
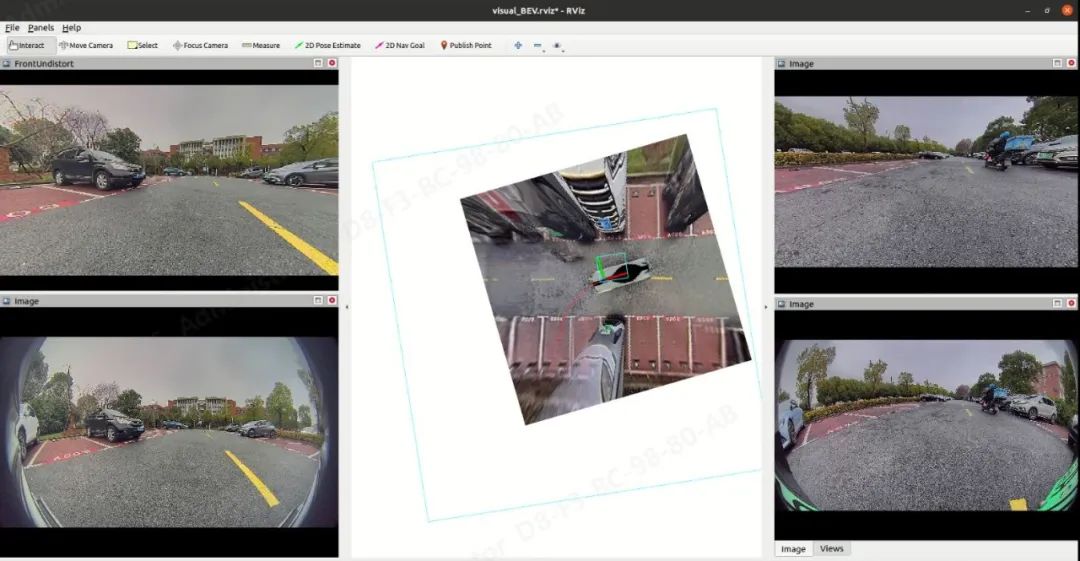
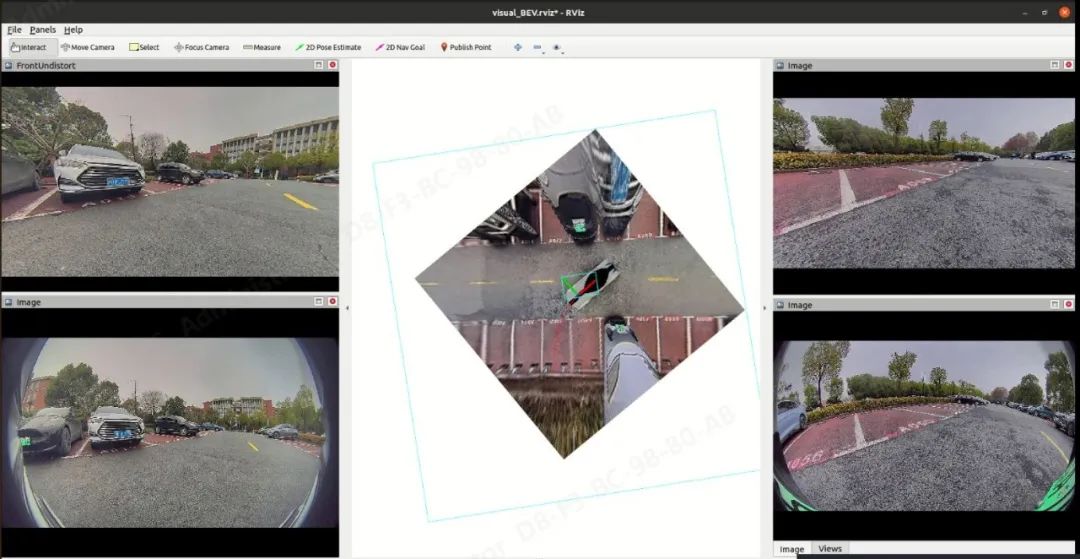
02 算法部署后的 demo 效果展示
03 实现过程
3.1 算法整体架构
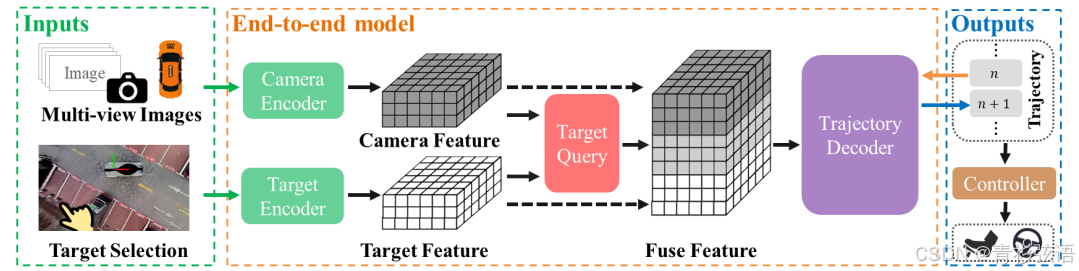
多视角 RGB 图像被处理,图像特征被转换为 BEV(鸟瞰图)表示形式。使用目标停车位生成 BEV 目标特征,通过目标查询将目标特征和图像 BEV 特征融合,然后使用自回归的 Transformer 解码器逐个获得预测的轨迹点。
3.2 训练过程
注:训练数据集是去完畸变的图像,在数据处理时需要对 4 路鱼眼相机进行标定,获取相机内外参,对鱼眼图进行去畸变,去完畸变的图像会被制作成训练集
获取去完畸变的 RGB 图像和目标停车位做为输入:
(去完畸变的 RGB 图像示例)

目标停车位坐标示例:
{
"x": 83.93134781878057,
"y": -7.080006849257972,
"z": -7.404438257656194,
"yaw": 20.95510451530132
}
- 使用 EfficientNet 从 RGB 图像中提取特征;
- 将预测的深度分布 ddep 与图像特征 Fimg 相乘,以获得具有深度信息的图像特征;
- 将图像特征投影到 BEV 体素网格(特征的大小为 200×200,对应实际空间范围 x∈[−10m, 10m], y∈[−10m, 10m],分辨率为 0.1 米)中,生成相机特征 Fcam。
BEV 视图示例:

- 使用深度 CNN 神经网络提取目标停车位特征 Ftarget
- 在 BEV 空间,将相机特征 Fcam 和目标停车位特征 Ftarget 进行融合,获取融合特征 Ffuse
- 使用 Transformer 解码器以自回归方式预测轨迹点
预测的轨迹序列示例:
[[-0.17014217376708984, -0.010008811950683594], [-0.3298116556863353, -0.011956165423615472], [-0.4854376561367579, -0.02052420170634236], [-0.6337416331734281, -0.03509474854381417], [-0.774850889165686, -0.05409092178920946], [-0.9106318371186677, -0.07662342910150008], [-1.0429499912911764, -0.10220288211346742], [-1.1730293341546085, -0.130403150090076], [-1.3014671109093938, -0.16081194272771432], [-1.4284175031869575, -0.19315076247807056], [-1.5537739117230407, -0.22739195648381574], [-1.6773593831451739, -0.2637573983721455], [-1.7991250198403412, -0.3025803813592571], [-1.9192866870681176, -0.34410827406410627], [-2.0383187092132995, -0.3883681895794497], [-2.1567872059422366, -0.43518302389208097], [-2.275088086162824, -0.4843281463722012], [-2.393198715763861, -0.5357188397161318], [-2.5105481374226417, -0.5894858888356189], [-2.6260817537118184, -0.6458681996255287], [-2.7385546018760474, -0.7049937228225489], [-2.84701611529502, -0.7667346960596122], [-2.9513409844272736, -0.8308041149223722], [-3.0525702187102848, -0.8970783878192974], [-3.1528531887709175, -0.9658913604113011], [-3.25493913830157, -1.0379629359384206], [-3.3612681922638727, -1.1139021444876271], [-3.4725675825974993, -1.193842039192509], [-3.58588491431963, -1.2783030155644421], [-3.69307804107666, -1.3711423873901367]]
实现过程图标表示:

3.3 推理过程
- 在 RViz 界面软件中使用“2D-Nav-Goal”来选择目标停车位
目标停车位停车轨迹示例:
position:
x: -6.49
y: -5.82
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0目标停车位停车轨迹示例:position:x: -6.49y: -5.82z: 0.0orientation:x: 0.0y: 0.0z: 0.0w: 1.0
- 获取起始位姿,将以起始点为原点的世界坐标转化为车辆坐标
起始轨迹位姿示例:
position:
x: -0.16161775150943924
y: 0.018056780251669124
z: 0.006380920023400627
orientation:
x: -0.0002508110368611588
y: 0.0008039258947159855
z: 0.010172557118261405
w: 0.9999479035823092
- 组合数据输入到 transformer 进行推理,预测轨迹序列
预测的轨迹序列示例:
[[-0.17014217376708984, -0.010008811950683594], [-0.3298116556863353, -0.011956165423615472], [-0.4854376561367579, -0.02052420170634236], [-0.6337416331734281, -0.03509474854381417], [-0.774850889165686, -0.05409092178920946], [-0.9106318371186677, -0.07662342910150008], [-1.0429499912911764, -0.10220288211346742], [-1.1730293341546085, -0.130403150090076], [-1.3014671109093938, -0.16081194272771432], [-1.4284175031869575, -0.19315076247807056], [-1.5537739117230407, -0.22739195648381574], [-1.6773593831451739, -0.2637573983721455], [-1.7991250198403412, -0.3025803813592571], [-1.9192866870681176, -0.34410827406410627], [-2.0383187092132995, -0.3883681895794497], [-2.1567872059422366, -0.43518302389208097], [-2.275088086162824, -0.4843281463722012], [-2.393198715763861, -0.5357188397161318], [-2.5105481374226417, -0.5894858888356189], [-2.6260817537118184, -0.6458681996255287], [-2.7385546018760474, -0.7049937228225489], [-2.84701611529502, -0.7667346960596122], [-2.9513409844272736, -0.8308041149223722], [-3.0525702187102848, -0.8970783878192974], [-3.1528531887709175, -0.9658913604113011], [-3.25493913830157, -1.0379629359384206], [-3.3612681922638727, -1.1139021444876271], [-3.4725675825974993, -1.193842039192509], [-3.58588491431963, -1.2783030155644421], [-3.69307804107666, -1.3711423873901367]]
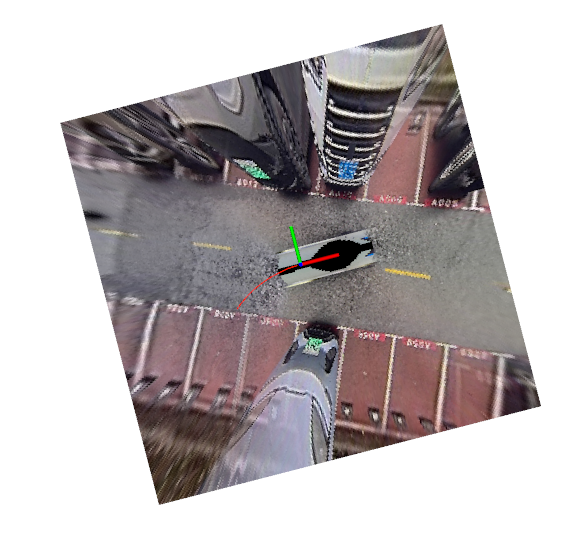
- 将预测的轨迹序列发布到 rviz 进行可视化
04 评估指标
端到端实车评估:在实车实验中,我们使用以下指标来评估端到端停车性能。
关键词解释:
PSR:停车成功率
NSR:无车位率
PVR:停车违规率
APE:平均位置误差
AOE:平均方向误差
APS:平均停车得分
APT:平均停车时间
05 局限性
- 由于数据规模和场景多样性的限制,我们的方法对移动目标的适应性较差
- 训练过程需要专家轨迹
.(img-7orUMtby-1731052248424)]
关键词解释:
PSR:停车成功率
NSR:无车位率
PVR:停车违规率
APE:平均位置误差
AOE:平均方向误差
APS:平均停车得分
APT:平均停车时间
05 局限性
- 由于数据规模和场景多样性的限制,我们的方法对移动目标的适应性较差
- 训练过程需要专家轨迹
- 与传统的基于规则的停车方法相比仍有差距
相关文章:
自动泊车端到端算法 ParkingE2E 介绍
01 算法介绍 自主泊车是智能驾驶领域中的一项关键任务。传统的泊车算法通常使用基于规则的方案来实现。因为算法设计复杂,这些方法在复杂泊车场景中的有效性较低。 相比之下,基于神经网络的方法往往比基于规则的方法更加直观和多功能。通过收集大量专家…...
《手写Spring渐进式源码实践》实践笔记(第十七章 数据类型转换)
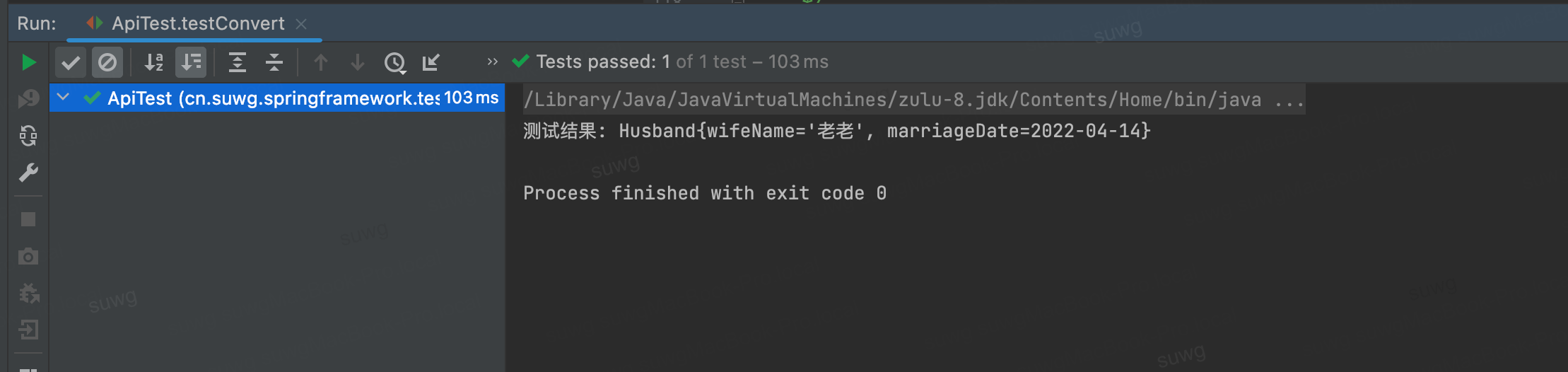
文章目录 第十七章 数据类型转换工厂设计实现背景技术背景Spring数据转换实现方式类型转换器(Converter)接口设计实现 业务背景 目标设计实现代码结构类图实现步骤 测试事先准备属性配置文件转换器工厂Bean测试用例测试结果: 总结 第十七章 数…...

W3C HTML 活动
关于W3C(万维网联盟)的HTML活动,我们可以从HTML的不同版本的发展历程中了解其主要的活跃时期和贡献。 HTML 2.0:这个版本的HTML是由Internet工程工作小组(IETF)的HTML工作组于1996年开发的。它是HTML的早期…...

机器学习—为什么我们需要激活函数
如果我们使用神经网络中每个神经元的线性激活函数,回想一下这个需求预测示例,如果对所有节点使用线性激活函数,在这个神经网络中,事实证明,这个大神经网络将变得与线性回归没有什么不同,所以这将挫败使用神…...

软考系统架构设计师论文:论软件的可靠性评价
试题四 论软件的可靠性评价 软件可靠性评价是软件可靠性活动的重要组成部分,既适用于软件开发过程,也可针对最 终软件系统。在软件开发过程中使用软件可靠性评价,可以使用软件可靠性模型,估计软件当前的可靠性,以确认是否可以终止测试并发布软件,同时还可以预计软件要达…...
的创建、调用及销毁)
C++:线程(thread)的创建、调用及销毁
在 C 中,线程的管理主要依赖于标准库 std::thread,自 C11 起,这一功能被标准化,使得我们能够更加方便地创建、管理和销毁线程。这里我们详细讲解线程的创建、调用和销毁流程。 1. 线程的创建 创建线程通常是为了在单独的线程中执…...

关于随身wifi,看了再决定要不要买!2024年最受欢迎的随身wifi品牌推荐!
话费、流量费缴纳起来肉疼,毕竟不是每个月都有很大需求,主打一个该省省该花花。特别是短租人群、在校学生、出差或旅游的人群、追求高性价比的人群,随身Wifi特别实用,出门当WiFi,在家当宽带,两不耽误&#…...

SpringMVC总结 我的学习笔记
SpringMVC总结 我的学习笔记 一、SpringMVC简介1.MVC2.SpringMVC概述3. SpringMVC中的核心组件4.SpringMVC核心架构流程 二、SpringMVC框架实例具体实现使用注解实现 四、数据处理及跳转1.结果跳转方式2.处理器方法的参数与返回值处理提交数据数据显示到前端 五、RestFul风格1.…...

DevCheck Pro手机硬件检测工具v5.33
前言 DevCheck Pro是一款手机硬件和操作系统信息检测查看工具,该软件的功能非常强大,为用户提供了系统、硬件、应用程序、相机、网络、电池等一系列信息查看功能 安装环境 [名称]:DevCheckPro [版本]:5.33 [大小]&a…...

数据分析ReAct工作流
让我用一个数据分析项目的例子来展示plan-and-execute框架的应用。这个例子会涉及数据处理、分析和可视化等任务。 from typing import List, Dict, Any from dataclasses import dataclass import json from enum import Enum import logging from datetime import datetime#…...

Rust-AOP编程实战
文章本天成,妙手偶得之。粹然无疵瑕,岂复须人为?君看古彝器,巧拙两无施。汉最近先秦,固已殊淳漓。胡部何为者,豪竹杂哀丝。后夔不复作,千载谁与期? ——《文章》宋陆游 【哲理】文章…...

Flutter鸿蒙next 中的 Expanded 和 Flexible 使用技巧详解
在 Flutter 开发中,Expanded 和 Flexible 是两个非常常用的布局控件,它们可以帮助开发者更加灵活地管理 UI 布局的空间分配。虽然它们看起来非常相似,但它们的功能和使用场景有所不同。理解这两者的区别,能帮助你在构建复杂 UI 布…...

【微信小游戏学习心得】
这里是引用 微信小游戏学习心得 简介了解微信小游戏理解2d游戏原理数据驱动视图总结 简介 本人通过学习了解微信小游戏,学习微信小游戏,加深了对前端框架,vue和react基于数据驱动视图的理解,及浏览器文档模型和javaScript之间的关…...

Python | Leetcode Python题解之第539题最小时间差
题目: 题解: def getMinutes(t: str) -> int:return ((ord(t[0]) - ord(0)) * 10 ord(t[1]) - ord(0)) * 60 (ord(t[3]) - ord(0)) * 10 ord(t[4]) - ord(0)class Solution:def findMinDifference(self, timePoints: List[str]) -> int:n len…...

Zookeeper运维秘籍:四字命令基础、详解及业务应用全解析
文章目录 一、四字命令基础二、四字命令详解三、四字命令的开启与配置四、结合业务解读四字命令confconsenvi命令Stat命令MNTR命令ruok命令dump命令wchswchp ZooKeeper,作为一款分布式协调服务,提供了丰富的四字命令(也称为四字短语ÿ…...

Error: `slot-scope` are deprecated报错解决
本人新手菜鸡,文章为自己遇到问题的记录,如有错误或不足还请大佬批评指正 问题描述 在Vue3环境下使用slot插槽,出现‘slot-scope’ are deprecated报错问题,经过查找发现,是因为在slot插槽使用中,vue2和vu…...
中使用上标下标)
Excel(图例)中使用上标下标
单元格中 1、在Excel单元格中刷黑要设置成上标的字符,如m2中的2; 2、单击右键,在弹出的对话框中选择“设置单元格格式”; 3、在弹出的“设置单元格格式”对话框中选择上标(或下标); 4、最后…...

熔断和降级
目录 隔离和降级 FeignClient整合Sentinel 通过Feign设置服务降级 1.创建类实现FallbackFactory接口,并让这个类和使用FeignClient的接口类绑定 2.让order-service服务的feign开启sentinel 3.测试,只开启order-service服务,而不开启user-…...

【学习笔记】Linux系统基础知识 6 —— su命令详解
提示:学习Linux系统基础命令 su 命令详解,包含通过 su 命令切换用户实例 一、前期准备 1.已经正确安装并成功进入Linux系统 说明:本实验采用的 Redhat 系统(因系统不一致,可能部分显示存在差异) 二、学…...

docker-compose命令介绍
docker-compose命令介绍 docker-compose1. docker-compose是什么2. Compose file format3. 命令3.1 服务相关命令upruncreatestartrestartdownstopkillrmpauseunpause 3.2 镜像相关命令3.3 查看相关命令 docker-compose 学了docker,然后就直接去学k8s了。恍恍惚惚几…...

AI-调查研究-01-正念冥想有用吗?对健康的影响及科学指南
点一下关注吧!!!非常感谢!!持续更新!!! 🚀 AI篇持续更新中!(长期更新) 目前2025年06月05日更新到: AI炼丹日志-28 - Aud…...

【网络】每天掌握一个Linux命令 - iftop
在Linux系统中,iftop是网络管理的得力助手,能实时监控网络流量、连接情况等,帮助排查网络异常。接下来从多方面详细介绍它。 目录 【网络】每天掌握一个Linux命令 - iftop工具概述安装方式核心功能基础用法进阶操作实战案例面试题场景生产场景…...
)
论文解读:交大港大上海AI Lab开源论文 | 宇树机器人多姿态起立控制强化学习框架(二)
HoST框架核心实现方法详解 - 论文深度解读(第二部分) 《Learning Humanoid Standing-up Control across Diverse Postures》 系列文章: 论文深度解读 + 算法与代码分析(二) 作者机构: 上海AI Lab, 上海交通大学, 香港大学, 浙江大学, 香港中文大学 论文主题: 人形机器人…...
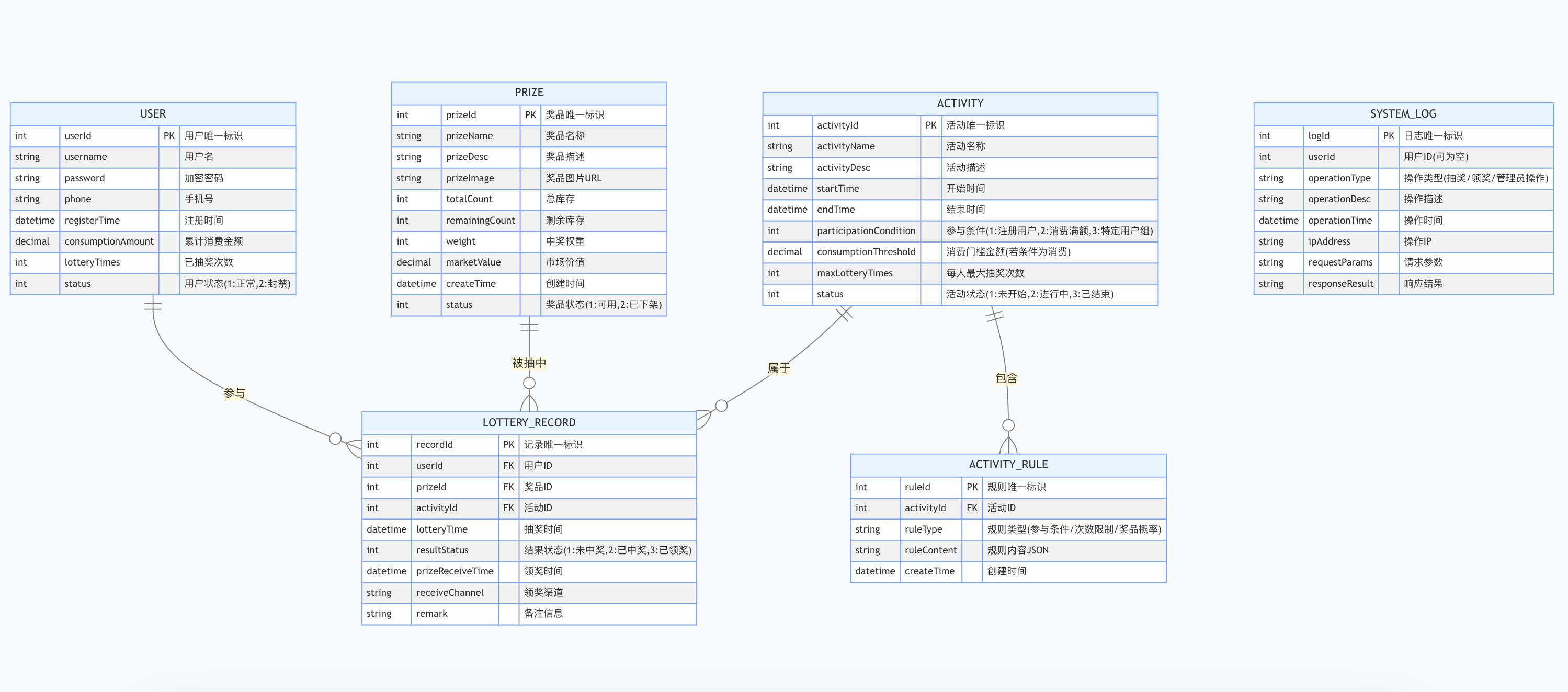
简易版抽奖活动的设计技术方案
1.前言 本技术方案旨在设计一套完整且可靠的抽奖活动逻辑,确保抽奖活动能够公平、公正、公开地进行,同时满足高并发访问、数据安全存储与高效处理等需求,为用户提供流畅的抽奖体验,助力业务顺利开展。本方案将涵盖抽奖活动的整体架构设计、核心流程逻辑、关键功能实现以及…...

Swift 协议扩展精进之路:解决 CoreData 托管实体子类的类型不匹配问题(下)
概述 在 Swift 开发语言中,各位秃头小码农们可以充分利用语法本身所带来的便利去劈荆斩棘。我们还可以恣意利用泛型、协议关联类型和协议扩展来进一步简化和优化我们复杂的代码需求。 不过,在涉及到多个子类派生于基类进行多态模拟的场景下,…...

Python爬虫实战:研究feedparser库相关技术
1. 引言 1.1 研究背景与意义 在当今信息爆炸的时代,互联网上存在着海量的信息资源。RSS(Really Simple Syndication)作为一种标准化的信息聚合技术,被广泛用于网站内容的发布和订阅。通过 RSS,用户可以方便地获取网站更新的内容,而无需频繁访问各个网站。 然而,互联网…...
大数据零基础学习day1之环境准备和大数据初步理解
学习大数据会使用到多台Linux服务器。 一、环境准备 1、VMware 基于VMware构建Linux虚拟机 是大数据从业者或者IT从业者的必备技能之一也是成本低廉的方案 所以VMware虚拟机方案是必须要学习的。 (1)设置网关 打开VMware虚拟机,点击编辑…...
【CSS position 属性】static、relative、fixed、absolute 、sticky详细介绍,多层嵌套定位示例
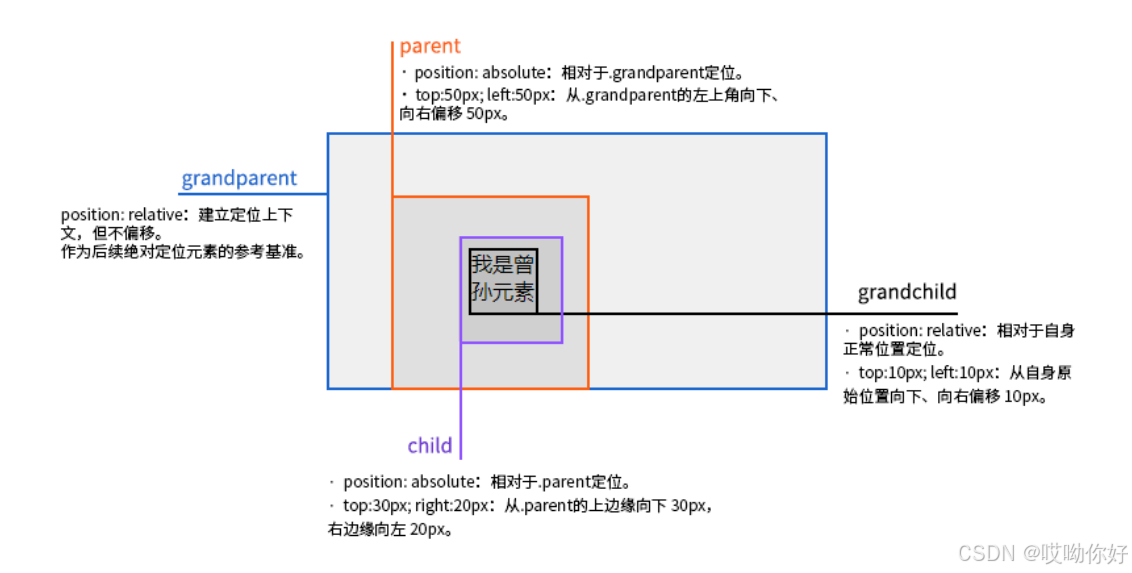
文章目录 ★ position 的五种类型及基本用法 ★ 一、position 属性概述 二、position 的五种类型详解(初学者版) 1. static(默认值) 2. relative(相对定位) 3. absolute(绝对定位) 4. fixed(固定定位) 5. sticky(粘性定位) 三、定位元素的层级关系(z-i…...

将对透视变换后的图像使用Otsu进行阈值化,来分离黑色和白色像素。这句话中的Otsu是什么意思?
Otsu 是一种自动阈值化方法,用于将图像分割为前景和背景。它通过最小化图像的类内方差或等价地最大化类间方差来选择最佳阈值。这种方法特别适用于图像的二值化处理,能够自动确定一个阈值,将图像中的像素分为黑色和白色两类。 Otsu 方法的原…...
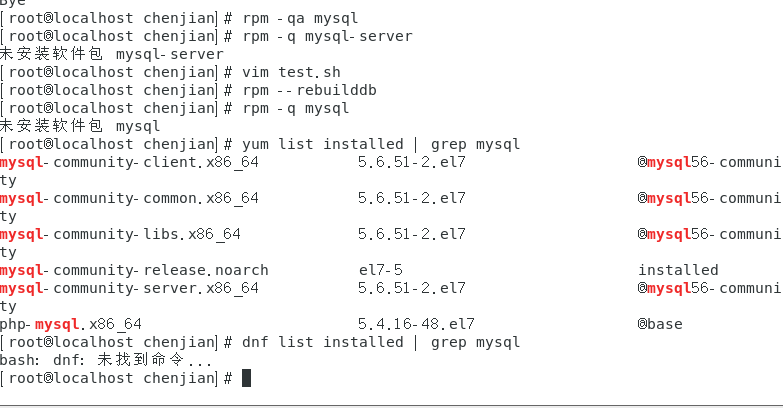
mysql已经安装,但是通过rpm -q 没有找mysql相关的已安装包
文章目录 现象:mysql已经安装,但是通过rpm -q 没有找mysql相关的已安装包遇到 rpm 命令找不到已经安装的 MySQL 包时,可能是因为以下几个原因:1.MySQL 不是通过 RPM 包安装的2.RPM 数据库损坏3.使用了不同的包名或路径4.使用其他包…...