ORB_SLAM3安装
ORB_SLAM3安装
- 一.前期准备
- 1.1ubuntu查看当前版本的命令
- 1.2 根据ubuntu版本,更新下载软件源
- 1.3 先下载git
- 1.4 vim语法高亮
- 1.5 常见的linux命令
- 二.ORB-SLAM3下载
- 2.1 ORB_SLAM3源码下载
- 2.2 安装依赖库
- 2.2.1 依赖库
- 2.2.2 安装pangolin
- 2.2.3 安装opencv
- 2.2.4 Eigen3安装
- 三 数据集运行
- 3.1 下载EuRoc数据集
- 3.2 文件修改(看情况)
- 3.3 运行数据集
- 四 ROS在ORB_SLAM3上应用
2024年11月8日 SMU
一.前期准备
1.1ubuntu查看当前版本的命令
lsb_release -a

1.2 根据ubuntu版本,更新下载软件源
进入文件源配置文件中
sudo vi /etc/apt/sources.list
进入后为如下图所示

先将vim中内容清空
%d enter(回车)
将里面的文字替换为
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ jammy main restricted universe multiverse
deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ jammy main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ jammy-updates main restricted universe multiverse
deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ jammy-updates main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ jammy-backports main restricted universe multiverse
deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ jammy-backports main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ jammy-security main restricted universe multiverse
deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ jammy-security main restricted universe multiverse
1.3 先下载git
sudo apt install git
允许访问github,要解除防火墙
sudo nano /etc/hosts
在文件的末尾添加以下内容:
140.82.113.4 github.com 140.82.114.4 gist.github.com
1.4 vim语法高亮
参考这个:https://blog.csdn.net/weixin_44607113/article/details/140994318
1.5 常见的linux命令
https://blog.csdn.net/m0_46422300/article/details/104645072
二.ORB-SLAM3下载
2.1 ORB_SLAM3源码下载
git clone https://github.com/UZ-SLAMLab/ORB_SLAM3.git解压缩
在这里插入代码片
2.2 安装依赖库
2.2.1 依赖库
sudo apt install libgl1-mesa-dev //opengl
sudo apt install libglew-dev //glew
sudo apt-get install libepoxy-dev //epoxy
sudo apt install python3//python3
sudo apt install python3-pip//python3 pip
pip install numpy //numpy
sudo apt install cmake //cmake
2.2.2 安装pangolin
git clone https://github.com/stevenlovegrove/Pangolin.git
cd Pangolin
mkdir build
cd build
cmake ..
make -j4
sudo make install
安装pangolin成功

2.2.3 安装opencv
首先在windows下载opencv==4.4.0版本
然后再解压缩,安装opencv相关依赖项
sudo apt-get install build-essential libgtk2.0-dev libavcodec-dev libavformat-dev libjpeg-dev libswscale-dev libtiff5-dev
sudo apt-get install libgtk2.0-dev
sudo apt-get install pkg-config
opencv下建立build文件
mkdir build
cd build
然后运行
sudo cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local ..
编译
sudo make -j8
sudo make install
opencv环境配置
打开/etc/ld.so.conf
sudo vi /etc/ld.so.conf
并在最后一行加入include /usr/loacal/lib

运行sudo ldconfig,修改/etc/bash.bashrc 文件
sudo ldconfig
sudo vi /etc/bash.bashrc
在文件末尾加入:
PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig
export PKG_CONFIG_PATH
进入opencv build目录
sudo make install
pkg-config --modversion opencv4
2.2.4 Eigen3安装
sudo apt-get update
sudo apt-get install libeigen3-dev
在根目录下运行命令
cd ORB_SLAM3
chmod +x build.sh
./build.sh
出现
/home/yq/orb-slam3/ORB_SLAM3/Thirdparty/DBoW2/DBoW2/BowVector.h:17:10: fatal error: boost/serialization/serialization.hpp: 没有那个文件或目录17 | #include <boost/serialization/serialization.hpp>| ^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
表明缺少Boost库中的serialization模块
sudo apt-get install libboost-all-dev
出现错误
/usr/local/include/sigslot/signal.hpp:946:10: error: ‘decay_t’ in namespace ‘std’ does not name a template type; did you mean ‘decay’?946 | std::decay_t<Ptr> ptr;
表明要使用C++14
将cmake.txt中
# Check C++11 or C++0x support
include(CheckCXXCompilerFlag)
CHECK_CXX_COMPILER_FLAG("-std=c++11" COMPILER_SUPPORTS_CXX11)
CHECK_CXX_COMPILER_FLAG("-std=c++0x" COMPILER_SUPPORTS_CXX0X)
if(COMPILER_SUPPORTS_CXX11)set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++14")add_definitions(-DCOMPILEDWITHC11)message(STATUS "Using flag -std=c++14.")
elseif(COMPILER_SUPPORTS_CXX0X)set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++0x")add_definitions(-DCOMPILEDWITHC0X)message(STATUS "Using flag -std=c++0x.")
else()message(FATAL_ERROR "The compiler ${CMAKE_CXX_COMPILER} has no C++14 support. Please use a different C++ compiler.")
endif()
更改为
set(CMAKE_CXX_STANDARD 14)
set(CMAKE_CXX_EXTENSIONS OFF)
add_definitions(-DCOMPILEDWITHC11)
出现错误
/home/yq/orb-slam3/ORB_SLAM3/src/System.cc:26:10: fatal error: openssl/md5.h: 没有那个文件或目录26 | #include <openssl/md5.h>说明编译过程中缺少OpenSSL库中的md5.h头文件
sudo apt-get install libssl-dev
可以编译成功了!
三 数据集运行
3.1 下载EuRoc数据集
数据集地址:https://projects.asl.ethz.ch/datasets/doku.php?id=kmavvisualinertialdatasets#downloads

在ORB_SLAM3文件下新建一个dataset数据集
把数据集文件解压放到里面

在ORB_SLAM3下运行
3.2 文件修改(看情况)
如果是单目相机,特别要注意要去mono_euroc.cc下修改文件中的false改为true


3.3 运行数据集
然后回到ORB_SLAM3目录下,运行
chmod +x build.sh
./build.sh

这表明重新生成了可执行文件
然后运行这个
./Examples/Monocular/mono_euroc ./Vocabulary/ORBvoc.txt ./Examples/Monocular/EuRoC.yaml ./dataset/euroc_dataset/MH_01_easy ./Examples/Monocular/EuRoC_TimeStamps/MH01.txt
上述结构为
可执行文件:./Examples/Monocular/mono_euroc
词汇文件:./Vocalbulary/ORBvoc.txt
摄像头配置文件:./Examples/Monocular/EuRoC.yaml
Euroc数据集:./dataset/euroc_dataset/MH_01_easy
Euroc时间戳: ./Examples/Monocular/EuRoC_TimeStamps/MH01.txt
效果如下

四 ROS在ORB_SLAM3上应用
由于orb_slam作者的更新,ROS示例被放到了Examples_old位置,而Examples没有,所以进入Examples_old

添加ROS环境变量
ROS的路径

/home/yq/orb-slam3/ORB_SLAM3/Examples_old/ROS然后进入配置里面
vi ~/.bashrc
加入ROS路径,在最后一行进行环境变量的添加
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:PATH/ORB_SLAM3/Examples_old/ROS

进行配置刷新,并输出ROS环境变量路径来验证是否配置正确
source ~/.bashrc
echo $ROS_PACKAGE_PATH

运行build_ros.sh
chmod +x build_ros.sh
./build_ros.sh

相关文章:
ORB_SLAM3安装
ORB_SLAM3安装 一.前期准备1.1ubuntu查看当前版本的命令1.2 根据ubuntu版本,更新下载软件源1.3 先下载git1.4 vim语法高亮1.5 常见的linux命令 二.ORB-SLAM3下载2.1 ORB_SLAM3源码下载2.2 安装依赖库2.2.1 依赖库2.2.2 安装pangolin2.2.3 安装opencv2.2.4 Eigen3安装…...
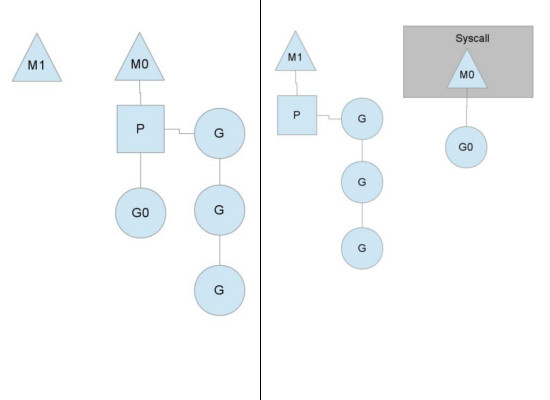
GoLang协程Goroutiney原理与GMP模型详解
本文原文地址:GoLang协程Goroutiney原理与GMP模型详解 什么是goroutine Goroutine是Go语言中的一种轻量级线程,也成为协程,由Go运行时管理。它是Go语言并发编程的核心概念之一。Goroutine的设计使得在Go中实现并发编程变得非常简单和高效。 以下是一些…...
全文检索ElasticSearch到底是什么?
学习ElasticSearch之前,我们先来了解一下搜索 1 搜索是什么 ① 概念:用户输入想要的关键词,返回含有该关键词的所有信息。 ② 场景: 1互联网搜索:谷歌、百度、各种新闻首页; 2 站内搜索ÿ…...
FPGA实现串口升级及MultiBoot(五)通过约束脚本添加IPROG实例
本文目录索引 一个指令和三种方式通过约束脚本添加Golden位流工程MultiBoot位流工程验证example1总结代码缩略词索引: K7:Kintex 7V7:Vertex 7A7:Artix 7MB:MicroBlaze上一篇文章种总结了MultiBoot 关键技术,分为:一个指令、二种位流、三种方式、四样错误。针对以上四句话我…...

文献阅读 | Nature Methods:使用 STAMP 对空间转录组进行可解释的空间感知降维
文献介绍 文献题目: 使用 STAMP 对空间转录组进行可解释的空间感知降维 研究团队: 陈金妙(新加坡科学技术研究局) 发表时间: 2024-10-15 发表期刊: Nature Methods 影响因子: 36.1࿰…...

【模块化大作战】Webpack如何搞定CommonJS与ES6混战(1-3)
在前端开发中,模块化是一个重要的概念,不同的模块化标准有不同的特点和适用场景。webpack 同时支持 CommonJS 和 ES6 Module,因此需要理解它们在互操作时 webpack 是如何处理的。 同模块化标准 如果导出和导入使用的是同一种模块化标准&…...

[NewStar 2024] week5完结
每次都需要用手机验证码登录,题作的差不多就没再进过。今天把week5解出的部分记录下。好像时间过去很久了。 Crypto 没e也能完 这题给了e,p,q,dp,dq。真不清楚还缺啥 long_to_bytes(pow(c,dp,p)) 格格你好棒 给了a,b和提示((p2*r) * 3*a q) % b < 70 其中r…...

IntelliJ IDEA的快捷键
IntelliJ IDEA 是一个非常强大的集成开发环境,它提供了大量的快捷键来加速开发者的日常工作。这里为您整理了一份 IntelliJ IDEA 的快捷键大全,包含了编辑、导航、重构、运行等多个方面的快捷键。请注意,这些快捷键是基于 Windows 版本的 Int…...

暮雨直播 1.3.2 | 内置直播源,频道丰富,永久免费
暮雨直播是一款内置直播源的电视直播应用程序,提供丰富的频道内容,包括教学、首页、一线、博主、解说、动漫、堆堆等。该应用的内置直播源持续更新维护,确保用户可以稳定地观看各种电视频道。暮雨直播承诺永久免费,为用户提供了一…...

单相锁相环,原理与Matlab实现
单相锁相环基本原理 单相锁相环的基本原理图如下所示, u α u_\alpha uα u β u_\beta uβ经Park变换、PI控制实现对角频率 ω \omega ω和角度 θ \theta θ的估算。不同锁相环方案之间的差异,主要表现在正交电压 u β u_\beta uβ的生成&#x…...

PICO+Unity 用手柄点击UI界面
如果UI要跟随头显,可将Canvas放置到XR Origin->Camera Offset->Main Camera下 1.Canvas添加TrackedDeviceGraphicRaycaster组件 2.EventSystem移动默认的Standard Input Module,添加XRUIInputModule组件 3.(可选)设置射线可…...
Rust移动开发:Rust在iOS端集成使用介绍
iOS调用Rust 上篇介绍了 Rust移动开发:Rust在Android端集成使用介绍, 这篇主要看下iOS上如何使用Rust,Rust可以给移动端开发提供跨平台,通用组件支持。 该篇适合对iOS、Rust了解,想知道如何整合调用和编译的,如果想要…...

虚拟现实技术在旅游行业的应用
💓 博客主页:瑕疵的CSDN主页 📝 Gitee主页:瑕疵的gitee主页 ⏩ 文章专栏:《热点资讯》 虚拟现实技术在旅游行业的应用 虚拟现实技术在旅游行业的应用 虚拟现实技术在旅游行业的应用 引言 虚拟现实技术概述 定义与原理…...

《Java核心技术 卷I》Swing使用颜色
使用颜色 使用Graphics2D类的setPaint方法可以为图形上下文上的所有后续的绘制操作选择颜色。例如: g2.setPaint(Color.RED); g2.drawString("Warning!",100,100); 可以用一种颜色填充一个封闭图像(例如:矩形或椭圆)的内部。为此ÿ…...

神书《从零构建大模型》分享,尚未发布,GitHub标星22k!!
《从零构建大模型》是一本即将于今年10月底发布的书籍,github已经吸引了惊人的21.7k标星!作者是威斯康星大学麦迪逊分校的终身教授,在GitHub、油管、X上拥有大量粉丝,是一位真正的大佬。 本书免费获取地址 在本书中࿰…...

【JavaEE进阶】Spring AOP 原理
在之前的博客中 【JavaEE进阶】Spring AOP使用篇_aop多个切点-CSDN博客 我们主要学习了SpringAOP的应用, 接下来我们来学习SpringAOP的原理, 也就是Spring是如何实现AOP的. SpringAOP 是基于动态代理来实现AOP的,咱们学习内容主要分以下两部分 1.代理模式 2.Spring AOP源码剖…...

【网络安全】2.3 安全的网络设计_2.防御深度原则
文章目录 一、网络架构二、网络设备三、网络策略四、处理网络安全事件五、实例学习:安全的网络设计结论 网络设计是网络安全的基础,一个好的网络设计可以有效的防止攻击者的入侵。在本篇文章中,我们将详细介绍如何设计一个安全的网络&#…...
测绘程序设计|C#字符串及其操作|分割|取子串|格式化数值|StringBuilder类
由于微信公众号改变了推送规则,为了每次新的推送可以在第一时间出现在您的订阅列表中,记得将本公众号设为星标或置顶喔~ 简单介绍了C#字符串分割、取子串、拼接、格式化数值以及StringBuilder类,拿捏测绘程序设计大赛~ 🌿前言 字…...

自然语言处理——Hugging Face 详解
Hugging Face 是一个以自然语言处理(NLP)为核心的人工智能平台和开源社区,提供了一系列非常流行的机器学习工具和预训练模型,尤其在文本生成、分类、翻译、情感分析等任务中表现出色。Hugging Face 旗下最为著名的项目是 Transfor…...

本地保存mysql凭据实现免密登录mysql
本地保存mysql凭据 mysql加密登录文件简介加密保存mysql用户的密码到本地凭据 mysql加密登录文件简介 要在 mysql客户端 上连接 MySQL 而无需在命令提示符上输入用户名和口令,下列三个位置可用于存储用户的mysql 凭证来满足此要求。 配置文件my.cnf或my.ini /etc…...

Linux链表操作全解析
Linux C语言链表深度解析与实战技巧 一、链表基础概念与内核链表优势1.1 为什么使用链表?1.2 Linux 内核链表与用户态链表的区别 二、内核链表结构与宏解析常用宏/函数 三、内核链表的优点四、用户态链表示例五、双向循环链表在内核中的实现优势5.1 插入效率5.2 安全…...

工业安全零事故的智能守护者:一体化AI智能安防平台
前言: 通过AI视觉技术,为船厂提供全面的安全监控解决方案,涵盖交通违规检测、起重机轨道安全、非法入侵检测、盗窃防范、安全规范执行监控等多个方面,能够实现对应负责人反馈机制,并最终实现数据的统计报表。提升船厂…...

中南大学无人机智能体的全面评估!BEDI:用于评估无人机上具身智能体的综合性基准测试
作者:Mingning Guo, Mengwei Wu, Jiarun He, Shaoxian Li, Haifeng Li, Chao Tao单位:中南大学地球科学与信息物理学院论文标题:BEDI: A Comprehensive Benchmark for Evaluating Embodied Agents on UAVs论文链接:https://arxiv.…...

智能在线客服平台:数字化时代企业连接用户的 AI 中枢
随着互联网技术的飞速发展,消费者期望能够随时随地与企业进行交流。在线客服平台作为连接企业与客户的重要桥梁,不仅优化了客户体验,还提升了企业的服务效率和市场竞争力。本文将探讨在线客服平台的重要性、技术进展、实际应用,并…...

SpringBoot+uniapp 的 Champion 俱乐部微信小程序设计与实现,论文初版实现
摘要 本论文旨在设计并实现基于 SpringBoot 和 uniapp 的 Champion 俱乐部微信小程序,以满足俱乐部线上活动推广、会员管理、社交互动等需求。通过 SpringBoot 搭建后端服务,提供稳定高效的数据处理与业务逻辑支持;利用 uniapp 实现跨平台前…...

Java线上CPU飙高问题排查全指南
一、引言 在Java应用的线上运行环境中,CPU飙高是一个常见且棘手的性能问题。当系统出现CPU飙高时,通常会导致应用响应缓慢,甚至服务不可用,严重影响用户体验和业务运行。因此,掌握一套科学有效的CPU飙高问题排查方法&…...

代码随想录刷题day30
1、零钱兑换II 给你一个整数数组 coins 表示不同面额的硬币,另给一个整数 amount 表示总金额。 请你计算并返回可以凑成总金额的硬币组合数。如果任何硬币组合都无法凑出总金额,返回 0 。 假设每一种面额的硬币有无限个。 题目数据保证结果符合 32 位带…...

掌握 HTTP 请求:理解 cURL GET 语法
cURL 是一个强大的命令行工具,用于发送 HTTP 请求和与 Web 服务器交互。在 Web 开发和测试中,cURL 经常用于发送 GET 请求来获取服务器资源。本文将详细介绍 cURL GET 请求的语法和使用方法。 一、cURL 基本概念 cURL 是 "Client URL" 的缩写…...
)
华为OD最新机试真题-数组组成的最小数字-OD统一考试(B卷)
题目描述 给定一个整型数组,请从该数组中选择3个元素 组成最小数字并输出 (如果数组长度小于3,则选择数组中所有元素来组成最小数字)。 输入描述 行用半角逗号分割的字符串记录的整型数组,0<数组长度<= 100,0<整数的取值范围<= 10000。 输出描述 由3个元素组成…...
6.9-QT模拟计算器
源码: 头文件: widget.h #ifndef WIDGET_H #define WIDGET_H#include <QWidget> #include <QMouseEvent>QT_BEGIN_NAMESPACE namespace Ui { class Widget; } QT_END_NAMESPACEclass Widget : public QWidget {Q_OBJECTpublic:Widget(QWidget *parent nullptr);…...