【Go】-go中的锁机制
目录
一、锁的基础知识
1. 互斥量/互斥锁
2. CAS(compare and swap)
3. 自旋锁
4. 读写锁
5. 乐观锁 & 悲观锁
6. 死锁
二、go中锁机制
1. Mutex-互斥锁
2. RWMutex-读写锁
2.1 RWMutex流程概览
2.2 写锁饥饿问题
2.3. golang的读写锁源码剖析
2.3.1 读锁实现
2.3.2 写锁实现
2.3.3 关键核心机制
3. 常见问题
一、锁的基础知识
1. 互斥量/互斥锁
互斥量(Mutex), 又称为互斥锁, 是一种用来保护临界区的特殊变量, 它可以处于锁定(locked) 状态, 也可以处于解锁(unlocked) 状态。
在编程中,引入了对象互斥锁的概念,来保证共享数据操作的完整性。每个对象都对应于一个可称为" 互斥锁" 的标记,这个标记用来保证在任一时刻,只能有一个线程访问该对象。
2. CAS(compare and swap)
解决多线程并行情况下使用锁造成性能损耗的一种机制,CAS操作包含三个操作数——内存位置(V)、预期原值(A)和新值(B)。如果内存位置的值与预期原值相匹配,那么处理器会自动将该位置值更新为新值。否则,处理器不做任何操作。无论哪种情况,它都会在CAS指令之前返回该位置的值。CAS有效地说明了“我认为位置V应该包含值A;如果包含该值,则将B放到这个位置;否则,不要更改该位置,只告诉我这个位置现在的值即可。"
CAS机制执行流程:

CAS存在的问题:
1. ABA问题
CAS需要在操作值的时候,检查值有没有发生变化,如果没有发生变化就更新,但是如果一个值原来是A,变成了B,又变成了A,那么使用CAS进行检查时会发现它的值没有发生变化,但是实际上却变化了 —> 这就是所谓的ABA问题。
ABA问题的解决思路其实也很简单,就是使用版本号。在变量前面追加上版本号,每次变量更新的时候把版本号加1,那么A→B→A就会变成1A→2B→3A了。
2. 循环时间长开销大
自旋CAS如果长时间不成功,会给CPU带来非常大的执行开销
3. 只能保证一个共享变量的原子操作
当对一个共享变量执行操作时,我们可以使用循环CAS的方式来保证原子操作,但是对多个共享变量操作时,循环CAS就无法保证操作的原子性,这个时候就可以用锁。
3. 自旋锁
自旋锁与互斥锁比较类似,它们都是为了解决对某项资源的互斥使用。无论是互斥锁,还是自旋锁,在任何时刻,最多只能有一个保持者,也就说,在任何时刻最多只能有一个执行单元获得锁。但是两者在调度机制上略有不同。对于互斥锁,如果资源已经被占用,资源申请者只能进入睡眠状态。但是自旋锁不会引起调用者睡眠,如果自旋锁已经被别的执行单元保持,调用者就一直循环在那里看是否该自旋锁的保持者已经释放了锁,"自旋"一词就是因此而得名。
自旋锁可能存在的2个问题:
-
试图递归地获得自旋锁必然会引起死锁:递归程序的持有实例在第二个实例循环,以试图获得相同自旋锁时,不会释放此自旋锁。
在递归程序中使用自旋锁应遵守下列策略:递归程序决不能在持有自旋锁时调用它自己,也决不能在递归调用时试图获得相同的自旋锁。 -
过多占用cpu资源。如果不加限制,由于申请者一直在循环等待,因此自旋锁在锁定的时候,如果不成功,不会睡眠,会持续的尝试,单cpu的时候自旋锁会让其它process动不了. 因此,一般自旋锁实现会有一个参数限定最多持续尝试次数. 超出后, 自旋锁放弃当前time slice. 等下一次机会。
由此可见,自旋锁比较适用于锁使用者保持锁时间比较短的情况。正是由于自旋锁使用者一般保持锁时间非常短,因此选择自旋而不是睡眠是非常必要的,自旋锁的效率远高于互斥锁。
4. 读写锁
读写锁实际是一种特殊的自旋锁,它把对共享资源的访问者划分成读者和写者,读者只对共享资源进行读访问,写者则需要对共享资源进行写操作。
这种锁相对于自旋锁而言,能提高并发性,因为在多处理器系统中,它允许同时有多个读者来访问共享资源,最大可能的读者数为实际的逻辑CPU数。写者是排他性的,一个读写锁同时只能有一个写者或多个读者(与CPU数相关),但不能同时既有读者又有写者。在读写锁保持期间也是抢占失效的。
如果读写锁当前没有读者,也没有写者,那么写者可以立刻获得读写锁,否则它必须自旋在那里,直到没有任何写者或读者。如果读写锁没有写者,那么读者可以立即获得该读写锁,否则读者必须自旋在那里,直到写者释放该读写锁。
5. 乐观锁 & 悲观锁
乐观锁其实主要就是一种思想,因为乐观锁的操作过程中其实没有没有任何锁的参与,乐观锁只是和悲观锁相对,严格的说乐观锁不能称之为锁。
悲观锁:总是假设最坏的情况,每次去拿数据的时候都认为别人会修改,所以每次在拿数据的时候都会上锁,这样别人想拿这个数据就会阻塞,直到它拿到锁(共享资源每次只给一个线程使用,其它线程阻塞,用完后再把资源转让给其它线程)。
乐观锁:总是假设最好的情况,每次去拿数据的时候都认为别人不会修改,所以不会上锁,只在更新的时候会判断一下在此期间别人有没有去更新这个数据。
乐观锁适用于写比较少的情况下(多读场景),即冲突真的很少发生的时候,这样可以省去了锁的开销,加大了系统的整个吞吐量。但如果是多写的情况,一般会经常产生冲突,这就会导致上层应用会不断的进行retry,这样反倒是降低了性能,所以一般多写的场景下用悲观锁就比较合适。
乐观锁常见的两种实现方式:
1. 版本号机制
CAS机制保证了在更新数据的时候没有被修改为其他数据的同步机制,版本机制就保证了没有被修改过的同步机制
2. CAS机制
当多个线程尝试使用CAS同时更新同一个变量时,只有其中一个线程能更新变量的值,而其它线程都失败。
6. 死锁
死锁是指两个或两个以上的进程在执行过程中,由于竞争资源或者由于彼此通信而造成的一种阻塞的现象,若无外力作用,它们都将无法推进下去。此时称系统处于死锁状态或系统产生了死锁,这些永远在互相等待的进程称为死锁进程。
虽然进程在运行过程中,可能发生死锁,但死锁的发生也必须具备一定的条件,死锁的发生必须具备以下四个必要条件:
- 互斥条件:指进程对所分配到的资源进行排它性使用,即在一段时间内某资源只由一个进程占用。如果此时还有其它进程请求资源,则请求者只能等待,直至占有资源的进程用毕释放。
- 请求和保持条件:指进程已经保持至少一个资源,但又提出了新的资源请求,而该资源已被其它进程占有,此时请求进程阻塞,但又对自己已获得的其它资源保持不放。
- 不剥夺条件:指进程已获得的资源,在未使用完之前,不能被剥夺,只能在使用完时由自己释放。
- 环路等待条件:指在发生死锁时,必然存在一个进程——资源的环形链,即进程集合{P0,P1,P2,···,Pn}中的P0正在等待一个P1占用的资源;P1正在等待P2占用的资源,……,Pn正在等待已被P0占用的资源。
二、go中锁机制
在 Golang 里有专门的方法来实现锁,就是 sync 包,这个包有两个很重要的锁类型。一个叫 Mutex, 利用它可以实现互斥锁。一个叫 RWMutex,利用它可以实现读写锁。
sync.Mutex的锁只有一种锁:Lock(),它是互斥锁,同一时间只能有一个锁。sync.RWMutex叫读写锁,它有两种锁:RLock()和Lock():RLock()叫读锁。它不是绝对锁,可以有多个读者同时获取此锁(调用mu.RLock)。Lock()叫写锁,它是个绝对锁,就是说,如果一旦某人拿到了这个锁,别人就不能再获取此锁了。
1. Mutex-互斥锁
Mutex 的实现主要借助了 CAS 指令 + 自旋 + 信号量
数据结构:
type Mutex struct {state int32sema uint32
}
上述两个加起来只占 8 字节空间的结构体表示了 Go语言中的互斥锁
状态:
在默认情况下,互斥锁的所有状态位都是 0,int32 中的不同位分别表示了不同的状态:
- 1位表示是否被锁定
- 1位表示是否有协程已经被唤醒
- 1位表示是否处于饥饿状态
- 剩下29位表示阻塞的协程数
正常模式和饥饿模式
正常模式:正常模式下waiter都是先入先出,在队列中等待的waiter被唤醒后不会直接获取锁,因为要和新来的goroutine 进行竞争,新来的goroutine相对于被唤醒的waiter是具有优势的,新的goroutine 正在cpu上运行,被唤醒的waiter还要进行调度才能进入状态,所以在并发的情况下waiter大概率抢不过新来的goroutine,这个时候waiter会被放到队列的头部,如果等待的时间超过了1ms,这个时候Mutex就会进入饥饿模式。
饥饿模式:当Mutex进入饥饿模式之后,锁的所有权会从解锁的goroutine移交给队列头部的goroutine,这几个时候新来的goroutine会直接放入队列的尾部,这样很好的解决了老的goroutine一直抢不到锁的场景。
对于两种模式,正常模式下的性能是最好的,goroutine可以连续多次获取锁,饥饿模式解决了取锁公平的问题,但是性能会下降,其实是性能和公平的一个平衡模式。所以在lock的源码里面,当队列只剩本省goroutine一个并且等待时间没有超过1ms,这个时候Mutex会重新恢复到正常模式。
Lock函数
// 加锁
// 如果锁已经被使用,调用goroutine阻塞,直到锁可用
func (m *Mutex) Lock() {// 快速路径:没有竞争直接获取到锁,修改状态位为加锁if atomic.CompareAndSwapInt32(&m.state, 0, mutexLocked) {// 开启-race之后会进行判断,正常情况可忽略if race.Enabled {race.Acquire(unsafe.Pointer(m))}return}// 慢路径(以便快速路径可以内联)m.lockSlow()
}
来看看Lock函数,分为两个部分, 快速路径,先通过CAS尝试直接获取锁,如果能获取到直接返回,否则进入慢路径的方法,这里的代码注释提到了内联
tips:方法内联
简单的说方法内联就是将被调用方函数代码“复制”到调用方函数中,减少函数调用开销,在2018年之前的go版本中,所有的逻辑都在Lock函数中,并没有拆出来,2018年之后Go开发者将slow path拆出来,当lock方法被频繁调用的时候,有两种情况,如果直接获得锁走的是fast path,这个时候内联就只有fast path 的代码,这样会减少方法调用的堆栈空间和时间的消耗 ,如果处于自旋,锁竞争的情况下,走的是slow path,这个时候才会把lock slow 的方法内联进来,这样方便了编译器做内联。
lockSlow 函数
func (m *Mutex) lockSlow() {var waitStartTime int64 //记录请求锁的初始时间starving := false //饥饿标记awoke := false //唤醒标记iter := 0 //自旋次数old := m.state //当前锁的状态for {//锁处于正常模式还没有释放的时候,尝试自旋if old&(mutexLocked|mutexStarving) == mutexLocked && runtime_canSpin(iter) { //在临界区耗时很短的情况下提高性能if !awoke && old&mutexWoken == 0 && old>>mutexWaiterShift != 0 && atomic.CompareAndSwapInt32(&m.state, old, old|mutexWoken) {awoke = true}runtime_doSpin()iter++//更新锁的状态old = m.statecontinue}new := old// 非饥饿状态进行加锁if old&mutexStarving == 0 {new |= mutexLocked}// 等待着数量+1if old&(mutexLocked|mutexStarving) != 0 {new += 1 << mutexWaiterShift}// 加锁的情况下切换为饥饿模式if starving && old&mutexLocked != 0 {new |= mutexStarving}//goroutine 唤醒的时候进行重置标志if awoke {if new&mutexWoken == 0 {throw("sync: inconsistent mutex state")}new &^= mutexWoken}// 设置新的状态if atomic.CompareAndSwapInt32(&m.state, old, new) {if old&(mutexLocked|mutexStarving) == 0 {break }// 判断是不是第一次加入队列// 如果之前就在队列里面等待了,加入到队头queueLifo := waitStartTime != 0if waitStartTime == 0 {waitStartTime = runtime_nanotime()}// 阻塞等待runtime_SemacquireMutex(&m.sema, queueLifo, 1)// 检查锁是否处于饥饿状态starving = starving || runtime_nanotime()-waitStartTime > starvationThresholdNsold = m.state// 如果锁处于饥饿状态,直接抢到锁if old&mutexStarving != 0 {if old&(mutexLocked|mutexWoken) != 0 || old>>mutexWaiterShift == 0 {throw("sync: inconsistent mutex state")}// 设置标志,进行加锁并且waiter-1delta := int32(mutexLocked - 1<<mutexWaiterShift)// 如果是最后一个的话清除饥饿标志if !starving || old>>mutexWaiterShift == 1 {// 退出饥饿模式 delta -= mutexStarving}atomic.AddInt32(&m.state, delta)break}awoke = trueiter = 0} else {old = m.state}}// -race开启检测冲突,可以忽略if race.Enabled {race.Acquire(unsafe.Pointer(m))}
}
Unlock函数
//如果对没有lock 的Mutex进行unlock会报错
//unlock和goroutine是没有绑定的,对于一个Mutex,可以一个goroutine加锁,另一个goroutine进行解锁
func (m *Mutex) Unlock() {if race.Enabled {_ = m.staterace.Release(unsafe.Pointer(m))}// 快速之路,直接解锁,去除加锁位的标记new := atomic.AddInt32(&m.state, -mutexLocked)if new != 0 {// 解锁失败进入慢路径//同样的对慢路径做了单独封装,便于内联m.unlockSlow(new)}
}
unlockSlow函数
func (m *Mutex) unlockSlow(new int32) {//解锁一个未加锁的Mutex会报错(可以想想为什么,Mutex使用状态位进行标记锁的状态的)if (new+mutexLocked)&mutexLocked == 0 {throw("sync: unlock of unlocked mutex")}if new&mutexStarving == 0 {old := newfor {//正常模式下,没有waiter或者在处理事情的情况下直接返回if old>>mutexWaiterShift == 0 || old&(mutexLocked|mutexWoken|mutexStarving) != 0 {return}//如果有等待者,设置mutexWoken标志,waiter-1,更新statenew = (old - 1<<mutexWaiterShift) | mutexWokenif atomic.CompareAndSwapInt32(&m.state, old, new) {runtime_Semrelease(&m.sema, false, 1)return}old = m.state}} else {// 饥饿模式下会直接将mutex交给下一个等待的waiter,让出时间片,以便waiter执行runtime_Semrelease(&m.sema, true, 1)}
}
同样的,在unlock也有fastpath和slowpath,fastpath尝试解锁,解锁成功就返回,否则进入slowpath,slowpath分为正常模式的处理和饥饿模式的处理,饥饿模式直接将锁的控制权交给队列中等待的waiter,正常模式分两种情况 如果当前没有waiter,只有自己本身,直接解锁返回,如果有waiter,解锁后唤醒下个等待者。
2. RWMutex-读写锁
RWMutex 是一个读/写互斥锁,在某一时刻只能由任意数量的 reader 持有 或者 一个 writer 持有。也就是说,要么放行任意数量的 reader,多个 reader 可以并行读;要么放行一个 writer,多个 writer 需要串行写。
RWMutex 对外暴露的方法有五个:
RLock():读操作获取锁,如果锁已经被 writer 占用,会一直阻塞直到 writer 释放锁;否则直接获得锁;RUnlock():读操作完毕之后释放锁;Lock():写操作获取锁,如果锁已经被 reader 或者 writer 占用,会一直阻塞直到获取到锁;否则直接获得锁;Unlock():写操作完毕之后释放锁;RLocker():返回读操作的 Locker 对象,该对象的 Lock() 方法对应 RWMutex 的 -RLock(),Unlock() 方法对应 RWMutex 的 RUnlock() 方法。
一旦涉及到多个 reader 和 writer ,就需要考虑优先级问题,是 reader 优先还是 writer 优先。
2.1 RWMutex流程概览
可以想象 RWMutex 有两个队伍,一个是包含 所有reader 和你获得准入权writer 的 队列A,一个是还没有获得准入权 writer 的 队列B。
队列 A 最多只允许有 一个writer,如果有其他 writer,需要在 队列B 等待;
当一个 writer 到了 队列A 后,只允许它 之前的reader 执行读操作,新来的 reader 需要在 队列A 后面排队;
当前面的 reader 执行完读操作之后,writer 执行写操作;
writer 执行完写操作后,让 后面的reader 执行读操作,再唤醒队列B 的一个 writer 到 队列A 后面排队。
初始时刻 队列A 中 writer W1 前面有三个 reader,后面有两个 reader,队列B中有两个 writer

并发读 多个 reader 可以同时获取到读锁,进入临界区进行读操作;writer W1 在 队列A 中等待,同时又来了两个 reader,直接在 队列A 后面排队

写操作 W1 前面所有的 reader 完成后,W1 获得锁,进入临界区操作

获得准入权 W1 完成写操作退出,先让后面排队的 reader 进行读操作,然后从 队列B 中唤醒 W2 到 队列A 排队。W2 从 队列B 到 队列A 的过程中,R8 先到了 队列A,因此 R8 可以执行读操作。R9、R10、R11 在 W2 之后到的,所以在后面排队;新来的 W4 直接在队列B 排队。

从上面的示例可以看出,RWMutex 可以看作是没有优先级,按照先来先到的顺序去执行,只不过是 多个reader 可以 并行去执行罢了。
2.2 写锁饥饿问题
因为读锁是共享的,所以如果当前已经有读锁,那后续goroutine继续加读锁正常情况下是可以加锁成功,但是如果一直有读锁进行加锁,那尝试加写锁的goroutine则可能会长期获取不到锁,这就是因为读锁而导致的写锁饥饿问题
go通过引入以下特性避免出现写锁饥饿:
- 当写锁阻塞时,新的读锁是无法申请的
即在sync.RWMutex的使用中,一个线程请求了他的写锁(mx.Lock())后,即便它还没有取到该锁(可能由于资源已被其他人锁定),后面所有的读锁的申请,都将被阻塞,只有取写锁的请求得到了锁且用完释放后,读锁才能去取。
这种特性可以有效防止写锁饥饿。如果一个线程因为某种原因,导致长时间得不到CPU时间片,这种状态被称之为饥饿。
2.3. golang的读写锁源码剖析
成员变量

结构体
type RWMutex struct {w Mutex // held if there are pending writerswriterSem uint32 // 用于writer等待读完成排队的信号量readerSem uint32 // 用于reader等待写完成排队的信号量readerCount int32 // 读锁的计数器readerWait int32 // 等待读锁释放的数量
}
写锁计数
读写锁中允许加读锁的最大数量是4294967296,在go里面对写锁的计数采用了负值进行,通过递减最大允许加读锁的数量从而进行写锁对读锁的抢占
const rwmutexMaxReaders = 1 << 30
2.3.1 读锁实现
读锁加锁逻辑

func (rw *RWMutex) RLock() {if race.Enabled {_ = rw.w.staterace.Disable()}// 累加reader计数器,如果小于0则表明有writer正在等待if atomic.AddInt32(&rw.readerCount, 1) < 0 {// 当前有writer正在等待读锁,读锁就加入排队runtime_SemacquireMutex(&rw.readerSem, false)}if race.Enabled {race.Enable()race.Acquire(unsafe.Pointer(&rw.readerSem))}
}
读锁释放逻辑

func (rw *RWMutex) RUnlock() {if race.Enabled {_ = rw.w.staterace.ReleaseMerge(unsafe.Pointer(&rw.writerSem))race.Disable()}// 如果小于0,则表明当前有writer正在等待if r := atomic.AddInt32(&rw.readerCount, -1); r < 0 {if r+1 == 0 || r+1 == -rwmutexMaxReaders {race.Enable()throw("sync: RUnlock of unlocked RWMutex")}// 将等待reader的计数减1,证明当前是已经有一个读的,如果值==0,则进行唤醒等待的if atomic.AddInt32(&rw.readerWait, -1) == 0 {// The last reader unblocks the writer.runtime_Semrelease(&rw.writerSem, false)}}if race.Enabled {race.Enable()}
}
2.3.2 写锁实现
加写锁实现

func (rw *RWMutex) Lock() {if race.Enabled {_ = rw.w.staterace.Disable()}// 首先获取mutex锁,同时多个goroutine只有一个可以进入到下面的逻辑rw.w.Lock()// 对readerCounter进行进行抢占,通过递减rwmutexMaxReaders允许最大读的数量// 来实现写锁对读锁的抢占r := atomic.AddInt32(&rw.readerCount, -rwmutexMaxReaders) + rwmutexMaxReaders// 记录需要等待多少个reader完成,如果发现不为0,则表明当前有reader正在读取,当前goroutine// 需要进行排队等待if r != 0 && atomic.AddInt32(&rw.readerWait, r) != 0 {runtime_SemacquireMutex(&rw.writerSem, false)}if race.Enabled {race.Enable()race.Acquire(unsafe.Pointer(&rw.readerSem))race.Acquire(unsafe.Pointer(&rw.writerSem))}
}
释放写锁

func (rw *RWMutex) Unlock() {if race.Enabled {_ = rw.w.staterace.Release(unsafe.Pointer(&rw.readerSem))race.Disable()}// 将reader计数器复位,上面减去了一个rwmutexMaxReaders现在再重新加回去即可复位r := atomic.AddInt32(&rw.readerCount, rwmutexMaxReaders)if r >= rwmutexMaxReaders {race.Enable()throw("sync: Unlock of unlocked RWMutex")}// 唤醒所有的读锁for i := 0; i < int(r); i++ {runtime_Semrelease(&rw.readerSem, false)}// 释放mutexrw.w.Unlock()if race.Enabled {race.Enable()}
}
2.3.3 关键核心机制
写锁对读锁的抢占
加写锁的抢占
// 在加写锁的时候通过将readerCount递减最大允许加读锁的数量,来实现对加读锁的抢占r := atomic.AddInt32(&rw.readerCount, -rwmutexMaxReaders) + rwmutexMaxReaders
加读锁的抢占检测
// 如果没有写锁的情况下读锁的readerCount进行Add后一定是一个>0的数字,这里通过检测值为负数
//就实现了读锁对写锁抢占的检测
if atomic.AddInt32(&rw.readerCount, 1) < 0 {// A writer is pending, wait for it.runtime_SemacquireMutex(&rw.readerSem, false)}
写锁抢占读锁后后续的读锁就会加锁失败,但是如果想加写锁成功还要继续对已经加读锁成功的进行等待
if r != 0 && atomic.AddInt32(&rw.readerWait, r) != 0 {// 写锁发现需要等待的读锁释放的数量不为0,就自己自己去休眠了runtime_SemacquireMutex(&rw.writerSem, false)
}
写锁既然休眠了,则必定要有一种唤醒机制其实就是每次释放锁的时候,当检查到有加写锁的情况下,就递减readerWait,并由最后一个释放reader lock的goroutine来实现唤醒写锁
if atomic.AddInt32(&rw.readerWait, -1) == 0 {// The last reader unblocks the writer.runtime_Semrelease(&rw.writerSem, false)
}
3. 常见问题
- 不可复制
和 Mutex 一样,RWMutex 也是不可复制。不能复制的原因和互斥锁一样。一旦读写锁被使用,它的字段就会记录它当前的一些状态。这个时候你去复制这把锁,就会把它的状态也给复制过来。但是,原来的锁在释放的时候,并不会修改你复制出来的这个读写锁,这就会导致复制出来的读写锁的状态不对,可能永远无法释放锁。 - 不可重入
不可重入的原因是,获得锁之后,还没释放锁,又申请锁,这样有可能造成死锁。比如 reader A 获取到了读锁,writer B 等待 reader A 释放锁,reader 还没释放锁又申请了一把锁,但是这把锁申请不成功,他需要等待 writer B。这就形成了一个循环等待的死锁。 - 加锁和释放锁一定要成对出现,不能忘记释放锁,也不能解锁一个未加锁的锁。
相关文章:
【Go】-go中的锁机制
目录 一、锁的基础知识 1. 互斥量/互斥锁 2. CAS(compare and swap) 3. 自旋锁 4. 读写锁 5. 乐观锁 & 悲观锁 6. 死锁 二、go中锁机制 1. Mutex-互斥锁 2. RWMutex-读写锁 2.1 RWMutex流程概览 2.2 写锁饥饿问题 2.3. golang的读写锁源…...

c ++零基础可视化——vector
c 零基础可视化——vector 初始化 vector<int> v0(5); // 0 0 0 0 0 vector<int> v1(5, 1); // 1 1 1 1 1 vector<int> v2{1, 2, 3} // 1 2 3 vector<int> v3(v1); // 1 1 1 1 1 vector<vector<int>> v4(2, vect…...

Centos 7 安装 Docker 最新版本
文章目录 一、卸载旧版本二、安装最新版本docker三、问题解决3.1 启动docker报错3.2 启动容器报错 一、卸载旧版本 #如果之前安装过旧版本的Docker,可以使用下面命令卸载 yum remove docker \docker-client \docker-client-latest \docker-common \docker-latest …...

构建高效在线教育:SpringBoot课程管理系统
1系统概述 1.1 研究背景 随着计算机技术的发展以及计算机网络的逐渐普及,互联网成为人们查找信息的重要场所,二十一世纪是信息的时代,所以信息的管理显得特别重要。因此,使用计算机来管理在线课程管理系统的相关信息成为必然。开发…...

二进制与网络安全的关系
二进制与网络安全的关系 声明! 学习视频来自B站up主 泷羽sec 有兴趣的师傅可以关注一下,如涉及侵权马上删除文章,笔记只是方便各位师傅的学习和探讨,文章所提到的网站以及内容,只做学习交流,其他均与本人以…...

【计算机网络】网段划分
一、为什么有网段划分 IP地址 网络号(目标网络) 主机号(目标主机) 网络号: 保证相互连接的两个网段具有不同的标识 主机号: 同一网段内,主机之间具有相同的网络号,但是必须有不同的主机号 互联网中的每一台主机,都要隶属于某一个子网 -&…...

VB、VBS、VBA的区别及作用
VB、VBS 和 VBA 是三种与微软 Visual Basic 相关的编程语言或环境,它们在功能和用途上有所不同: # Visual Basic (VB) Visual Basic 是一种面向对象的编程语言,最初由微软公司开发。它是一种高级编程语言,旨在简化开发过程&…...
与时间序列预测)
深度学习中的循环神经网络(RNN)与时间序列预测
一、循环神经网络(RNN)简介 循环神经网络(Recurrent Neural Networks,简称RNN)是一种专门用于处理序列数据的神经网络架构。与传统神经网络不同,RNN具有内部记忆能力,能够捕捉数据中的时间依赖…...
详解)
Unity 设计模式-原型模式(Prototype Pattern)详解
原型模式 (Prototype Pattern) 原型模式 (Prototype Pattern) 是一种创建型设计模式,它允许通过复制现有的对象来创建新对象,而不是通过直接实例化类。这意味着你可以通过克隆原型对象来生成新的实例,而不必依赖类的构造函数。该模式的核心思…...

如何在 RK3568 Android 11 系统上排查以太网问题
1. 硬件连接检查 在进行软件诊断之前,首先确保所有硬件连接正常: 确认网线可靠插入设备的以太网端口。交换机、路由器中与设备连接的端口是否正常工作。若有可能,尝试更换网线或使用其他端口。2. 使用命令行工具进行基本检查 检查网络接口状态 连接设备并使用 ADB 或终端…...
如何在WPF中嵌入其它程序
在WPF中嵌入其它程序,这里提供两种方案 一、使用WindowsFormHost 使用步骤如下 1、添加WindowsFormsIntegration和System.Windows.Forms引用 2、在界面上放置WindowsFormHost和System.Windows.Forms.Panel 1 <Grid> 2 <WindowsFormsHost> 3…...

大模型呼入系统是什么?
大模型呼入系统是什么? 作者:开源呼叫中心系统 FreeIPCC,Github地址:https://github.com/lihaiya/freeipcc 在呼叫中心领域,大模型呼入是指利用大型语言模型(如GPT等)处理客户呼入的电话请求&a…...

Flutter:SlideTransition位移动画,Interval动画延迟
配置vsync,需要实现一下with SingleTickerProviderStateMixinclass _MyHomePageState extends State<MyHomePage> with SingleTickerProviderStateMixin{// 定义 AnimationControllerlate AnimationController _controller;overridevoid initState() {super.…...

【Elasticsearch入门到落地】2、正向索引和倒排索引
接上篇《1、初识Elasticsearch》 上一篇我们学习了什么是Elasticsearch,以及Elastic stack(ELK)技术栈介绍。本篇我们来什么是正向索引和倒排索引,这是了解Elasticsearch底层架构的核心。 上一篇我们学习到,Elasticsearch的底层是由Lucene实…...
网络安全概论
一、 网络安全是一个综合性的技术。在Internet这样的环境中,其本身的目的就是为了提供一种开放式的交互环境,但是为了保护一些秘密信息,网络安全成为了在开放网络环境中必要的技术之一。网络安全技术是随着网络技术的进步逐步发展的。 网络安…...

后端开发如何高效使用 Apifox?
对于后端开发者来说,日常工作中少不了接口的设计、调试和文档编写。你是否也曾因接口文档更新不及时、测试工具分散而头疼不已?Apifox,这款全能型工具,或许能成为你的效率神器! Apifox究竟有哪些功能能帮助后端开发者…...

实现List接口的三类-ArrayList -Vector -LinkedList
一、ArrayList 数据结构与存储原理 ArrayList是基于动态数组实现的。它在内存中是一块连续的存储空间。当创建一个ArrayList时,会初始化一个默认大小(通常为10)的数组。随着元素的不断添加,如果数组容量不够,会进行扩…...
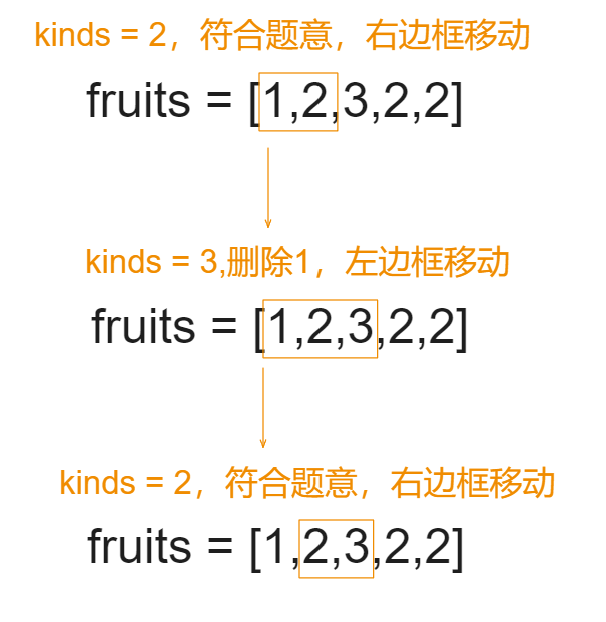
LeetCode 904.水果成篮
LeetCode 904.水果成篮 思路🧐: 求水果的最大数目,也就是求最大长度,我们是单调的向前求解,则能够想到使用滑动窗口进行解答,可以用hash表统计每个种类的个数,kinds变量统计当前种类,…...
GitHub 开源项目 Puter :云端互联操作系统
每天面对着各种云盘和在线应用,我们常常会遇到这样的困扰。 文件分散在不同平台很难统一管理,付费订阅的软件越来越多,更不用说那些烦人的存储空间限制了。 最近在 GitHub 上发现的一个开源项目 Puter 彻底改变了我的在线办公方式。 让人惊…...

美创科技入选2024数字政府解决方案提供商TOP100!
11月19日,国内专业咨询机构DBC德本咨询发布“2024数字政府解决方案提供商TOP100”榜单。美创科技凭借在政府数据安全领域多年的项目经验、技术优势与创新能力,入选收录。 作为专业数据安全产品与服务提供商,美创科技一直致力于为政府、金融、…...
` 方法)
深入浅出:JavaScript 中的 `window.crypto.getRandomValues()` 方法
深入浅出:JavaScript 中的 window.crypto.getRandomValues() 方法 在现代 Web 开发中,随机数的生成看似简单,却隐藏着许多玄机。无论是生成密码、加密密钥,还是创建安全令牌,随机数的质量直接关系到系统的安全性。Jav…...

1688商品列表API与其他数据源的对接思路
将1688商品列表API与其他数据源对接时,需结合业务场景设计数据流转链路,重点关注数据格式兼容性、接口调用频率控制及数据一致性维护。以下是具体对接思路及关键技术点: 一、核心对接场景与目标 商品数据同步 场景:将1688商品信息…...

【磁盘】每天掌握一个Linux命令 - iostat
目录 【磁盘】每天掌握一个Linux命令 - iostat工具概述安装方式核心功能基础用法进阶操作实战案例面试题场景生产场景 注意事项 【磁盘】每天掌握一个Linux命令 - iostat 工具概述 iostat(I/O Statistics)是Linux系统下用于监视系统输入输出设备和CPU使…...

在鸿蒙HarmonyOS 5中使用DevEco Studio实现录音机应用
1. 项目配置与权限设置 1.1 配置module.json5 {"module": {"requestPermissions": [{"name": "ohos.permission.MICROPHONE","reason": "录音需要麦克风权限"},{"name": "ohos.permission.WRITE…...

华为云Flexus+DeepSeek征文|DeepSeek-V3/R1 商用服务开通全流程与本地部署搭建
华为云FlexusDeepSeek征文|DeepSeek-V3/R1 商用服务开通全流程与本地部署搭建 前言 如今大模型其性能出色,华为云 ModelArts Studio_MaaS大模型即服务平台华为云内置了大模型,能助力我们轻松驾驭 DeepSeek-V3/R1,本文中将分享如何…...
佰力博科技与您探讨热释电测量的几种方法
热释电的测量主要涉及热释电系数的测定,这是表征热释电材料性能的重要参数。热释电系数的测量方法主要包括静态法、动态法和积分电荷法。其中,积分电荷法最为常用,其原理是通过测量在电容器上积累的热释电电荷,从而确定热释电系数…...

【分享】推荐一些办公小工具
1、PDF 在线转换 https://smallpdf.com/cn/pdf-tools 推荐理由:大部分的转换软件需要收费,要么功能不齐全,而开会员又用不了几次浪费钱,借用别人的又不安全。 这个网站它不需要登录或下载安装。而且提供的免费功能就能满足日常…...

动态 Web 开发技术入门篇
一、HTTP 协议核心 1.1 HTTP 基础 协议全称 :HyperText Transfer Protocol(超文本传输协议) 默认端口 :HTTP 使用 80 端口,HTTPS 使用 443 端口。 请求方法 : GET :用于获取资源,…...
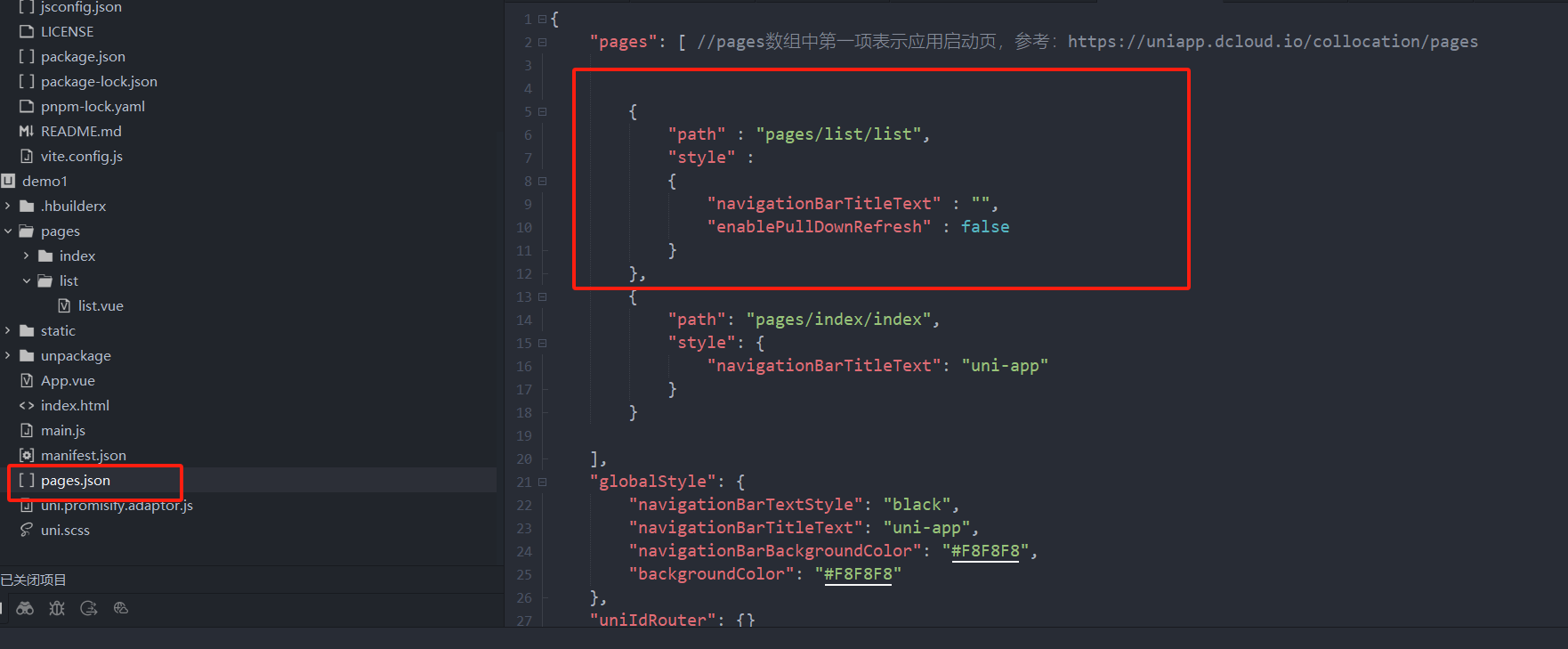
uniapp 小程序 学习(一)
利用Hbuilder 创建项目 运行到内置浏览器看效果 下载微信小程序 安装到Hbuilder 下载地址 :开发者工具默认安装 设置服务端口号 在Hbuilder中设置微信小程序 配置 找到运行设置,将微信开发者工具放入到Hbuilder中, 打开后出现 如下 bug 解…...

机器学习的数学基础:线性模型
线性模型 线性模型的基本形式为: f ( x ) ω T x b f\left(\boldsymbol{x}\right)\boldsymbol{\omega}^\text{T}\boldsymbol{x}b f(x)ωTxb 回归问题 利用最小二乘法,得到 ω \boldsymbol{\omega} ω和 b b b的参数估计$ \boldsymbol{\hat{\omega}}…...