STM32CUBEIDE FreeRTOS操作教程(十):interrupt on/off中断开关
STM32CUBEIDE FreeRTOS操作教程(十):interrupt on/off中断开关
STM32CUBE开发环境集成了STM32 HAL库进行FreeRTOS配置和开发的组件,不需要用户自己进行FreeRTOS的移植。这里介绍最简化的用户操作类应用教程。以STM32F401RCT6开发板为例,只用到USB,USART1极少的接口,体现FreeRTOS的各种操作过程。

操作教程(十)配置FreeRTOS及相关环境,通过软件定时器的中断响应,对LED管脚的输出翻转,实现LED的闪灯,又通过任务里实现的中断的开关,控制LED的一段时间常亮,和一段时间的闪灯。这里也在任务里用到了**指令式微秒延时函数**。
FreeRTOS的教程较多,推荐参考正点原子所出的《STM32F407 FreeRTOS开发手册》了解相关知识。


STM32CUBEIDE工程配置
选择TIM1(也可以是其它TIM)作为FreeRTOS操作系统占用的时钟源:


配置时钟树包括USB的48MHz时钟:

配置PC13为低电平点灯的管脚:

配置USB串口:





配置UART1串口(但本例中不用到UART1):




FreeRTOS配置











保存并生成基础工程代码:

在生成代码的这个部分可以看到FreeRTOS代码部分:

任务实现
USB接口收到串口数据时,保存数据和数据长度,任务里发现数据长度非0,则将数据从USB串口发送出去。这部分前面的操作教程已经介绍过,非本篇的主要介绍部分。
软件定时器中断里,进行LED控制管脚的输出翻转:
void LED_Timer01_Callback01(void *argument)
{/* USER CODE BEGIN LED_Timer01_Callback01 */HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_13);/* USER CODE END LED_Timer01_Callback01 */
}
在启动任务里,开启软件定时器中断:
void StartDefaultTask(void *argument)
{/* init code for USB_DEVICE */MX_USB_DEVICE_Init();xTimerChangePeriodFromISR( LED_Timer01Handle, Timer_Period_ms, &LED_pxHigherPriorityTaskWaken );xTimerStart( LED_Timer01Handle, LED_VCOM_xBlockTime );/* USER CODE BEGIN 5 *//* Infinite loop */for(;;){osDelay(10);}/* USER CODE END 5 */
}
LED控制任务代码里,体现了操作系统的1ms基准的调度延时,和1us基准的指令式微秒延时函数:
void StartTask_TASK_LED_FLASH(void *argument)
{/* USER CODE BEGIN StartTask_TASK_LED_FLASH *//* Infinite loop */for(;;){osDelay(6500);portDISABLE_INTERRUPTS();PY_Delay_us_t(5000000); //5S DelayportENABLE_INTERRUPTS();}/* USER CODE END StartTask_TASK_LED_FLASH */
}
完整的main.c文件:
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** Copyright (c) 2023 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
//Example 10: LED flash + interrupt on/off
//Written by Pegasus Yu
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "cmsis_os.h"
#include "usb_device.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "timers.h"
/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
__IO float usDelayBase = 7.63238716; //For STM32F401RCT6 working in 84MHz main clockvoid PY_Delay_us_t(uint32_t Delay)
{__IO uint32_t delayReg;__IO uint32_t usNum = (uint32_t)(Delay*usDelayBase);delayReg = 0;while(delayReg!=usNum) delayReg++;
}
/* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD *//* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*/
UART_HandleTypeDef huart1;
DMA_HandleTypeDef hdma_usart1_rx;/* Definitions for defaultTask */
osThreadId_t defaultTaskHandle;
const osThreadAttr_t defaultTask_attributes = {.name = "defaultTask",.stack_size = 128 * 4,.priority = (osPriority_t) osPriorityNormal,
};
/* Definitions for TASK_LED_FLASH */
osThreadId_t TASK_LED_FLASHHandle;
const osThreadAttr_t TASK_LED_FLASH_attributes = {.name = "TASK_LED_FLASH",.stack_size = 128 * 4,.priority = (osPriority_t) osPriorityLow,
};
/* Definitions for TASK_UART1 */
osThreadId_t TASK_UART1Handle;
const osThreadAttr_t TASK_UART1_attributes = {.name = "TASK_UART1",.stack_size = 128 * 4,.priority = (osPriority_t) osPriorityLow,
};
/* Definitions for TASK_USB_VCOM */
osThreadId_t TASK_USB_VCOMHandle;
const osThreadAttr_t TASK_USB_VCOM_attributes = {.name = "TASK_USB_VCOM",.stack_size = 128 * 4,.priority = (osPriority_t) osPriorityLow,
};
/* Definitions for LED_Timer01 */
osTimerId_t LED_Timer01Handle;
const osTimerAttr_t LED_Timer01_attributes = {.name = "LED_Timer01"
};
/* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_DMA_Init(void);
static void MX_USART1_UART_Init(void);
void StartDefaultTask(void *argument);
void StartTask_TASK_LED_FLASH(void *argument);
void StartTask_TASK_UART1(void *argument);
void StartTask_TASK_USB_VCOM(void *argument);
void LED_Timer01_Callback01(void *argument);/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
uint8_t CDC_Transmit_FS(uint8_t* Buf, uint16_t Len);
void usbprintstring(char * data)
{if(CDC_Transmit_FS((uint8_t *)data, strlen(data))==USBD_BUSY){PY_Delay_us_t(1000000);CDC_Transmit_FS((uint8_t *)data, strlen(data));}
}void usbprintarray(uint8_t * data, uint16_t len)
{if(CDC_Transmit_FS(data, len)==USBD_BUSY){PY_Delay_us_t(1000000);CDC_Transmit_FS(data, len);}
}uint8_t USB_VCOM_BUFF[1024];
uint32_t USB_VCOM_INDEX = 0;BaseType_t LED_pxHigherPriorityTaskWaken = 0;
TickType_t LED_VCOM_xBlockTime = 0;
uint32_t Timer_Period_ms = 1000;
/* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_DMA_Init();MX_USART1_UART_Init();/* USER CODE BEGIN 2 *//* USER CODE END 2 *//* Init scheduler */osKernelInitialize();/* USER CODE BEGIN RTOS_MUTEX *//* add mutexes, ... *//* USER CODE END RTOS_MUTEX *//* USER CODE BEGIN RTOS_SEMAPHORES *//* add semaphores, ... *//* USER CODE END RTOS_SEMAPHORES *//* Create the timer(s) *//* creation of LED_Timer01 */LED_Timer01Handle = osTimerNew(LED_Timer01_Callback01, osTimerPeriodic, NULL, &LED_Timer01_attributes);/* USER CODE BEGIN RTOS_TIMERS *//* start timers, add new ones, ... *//* USER CODE END RTOS_TIMERS *//* USER CODE BEGIN RTOS_QUEUES *//* add queues, ... *//* USER CODE END RTOS_QUEUES *//* Create the thread(s) *//* creation of defaultTask */defaultTaskHandle = osThreadNew(StartDefaultTask, NULL, &defaultTask_attributes);/* creation of TASK_LED_FLASH */TASK_LED_FLASHHandle = osThreadNew(StartTask_TASK_LED_FLASH, NULL, &TASK_LED_FLASH_attributes);/* creation of TASK_UART1 */TASK_UART1Handle = osThreadNew(StartTask_TASK_UART1, NULL, &TASK_UART1_attributes);/* creation of TASK_USB_VCOM */TASK_USB_VCOMHandle = osThreadNew(StartTask_TASK_USB_VCOM, NULL, &TASK_USB_VCOM_attributes);/* USER CODE BEGIN RTOS_THREADS *//* add threads, ... *//* USER CODE END RTOS_THREADS *//* USER CODE BEGIN RTOS_EVENTS *//* add events, ... *//* USER CODE END RTOS_EVENTS *//* Start scheduler */osKernelStart();/* We should never get here as control is now taken by the scheduler *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Configure the main internal regulator output voltage*/__HAL_RCC_PWR_CLK_ENABLE();__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE2);/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLM = 25;RCC_OscInitStruct.PLL.PLLN = 336;RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV4;RCC_OscInitStruct.PLL.PLLQ = 7;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}
}/*** @brief USART1 Initialization Function* @param None* @retval None*/
static void MX_USART1_UART_Init(void)
{/* USER CODE BEGIN USART1_Init 0 *//* USER CODE END USART1_Init 0 *//* USER CODE BEGIN USART1_Init 1 *//* USER CODE END USART1_Init 1 */huart1.Instance = USART1;huart1.Init.BaudRate = 115200;huart1.Init.WordLength = UART_WORDLENGTH_8B;huart1.Init.StopBits = UART_STOPBITS_1;huart1.Init.Parity = UART_PARITY_NONE;huart1.Init.Mode = UART_MODE_TX_RX;huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;huart1.Init.OverSampling = UART_OVERSAMPLING_16;if (HAL_UART_Init(&huart1) != HAL_OK){Error_Handler();}/* USER CODE BEGIN USART1_Init 2 *//* USER CODE END USART1_Init 2 */}/*** Enable DMA controller clock*/
static void MX_DMA_Init(void)
{/* DMA controller clock enable */__HAL_RCC_DMA2_CLK_ENABLE();/* DMA interrupt init *//* DMA2_Stream2_IRQn interrupt configuration */HAL_NVIC_SetPriority(DMA2_Stream2_IRQn, 5, 0);HAL_NVIC_EnableIRQ(DMA2_Stream2_IRQn);}/*** @brief GPIO Initialization Function* @param None* @retval None*/
static void MX_GPIO_Init(void)
{GPIO_InitTypeDef GPIO_InitStruct = {0};
/* USER CODE BEGIN MX_GPIO_Init_1 */
/* USER CODE END MX_GPIO_Init_1 *//* GPIO Ports Clock Enable */__HAL_RCC_GPIOC_CLK_ENABLE();__HAL_RCC_GPIOH_CLK_ENABLE();__HAL_RCC_GPIOA_CLK_ENABLE();/*Configure GPIO pin Output Level */HAL_GPIO_WritePin(LED_GPIO_Port, LED_Pin, GPIO_PIN_RESET);/*Configure GPIO pin : LED_Pin */GPIO_InitStruct.Pin = LED_Pin;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;HAL_GPIO_Init(LED_GPIO_Port, &GPIO_InitStruct);/* USER CODE BEGIN MX_GPIO_Init_2 */
/* USER CODE END MX_GPIO_Init_2 */
}/* USER CODE BEGIN 4 *//* USER CODE END 4 *//* USER CODE BEGIN Header_StartDefaultTask */
/*** @brief Function implementing the defaultTask thread.* @param argument: Not used* @retval None*/
/* USER CODE END Header_StartDefaultTask */
void StartDefaultTask(void *argument)
{/* init code for USB_DEVICE */MX_USB_DEVICE_Init();xTimerChangePeriodFromISR( LED_Timer01Handle, Timer_Period_ms, &LED_pxHigherPriorityTaskWaken );xTimerStart( LED_Timer01Handle, LED_VCOM_xBlockTime );/* USER CODE BEGIN 5 *//* Infinite loop */for(;;){osDelay(10);}/* USER CODE END 5 */
}/* USER CODE BEGIN Header_StartTask_TASK_LED_FLASH */
/**
* @brief Function implementing the TASK_LED_FLASH thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartTask_TASK_LED_FLASH */
void StartTask_TASK_LED_FLASH(void *argument)
{/* USER CODE BEGIN StartTask_TASK_LED_FLASH *//* Infinite loop */for(;;){osDelay(6500);portDISABLE_INTERRUPTS();PY_Delay_us_t(5000000); //5S DelayportENABLE_INTERRUPTS();}/* USER CODE END StartTask_TASK_LED_FLASH */
}/* USER CODE BEGIN Header_StartTask_TASK_UART1 */
/**
* @brief Function implementing the TASK_UART1 thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartTask_TASK_UART1 */
void StartTask_TASK_UART1(void *argument)
{/* USER CODE BEGIN StartTask_TASK_UART1 *//* Infinite loop */for(;;){osDelay(1);}/* USER CODE END StartTask_TASK_UART1 */
}/* USER CODE BEGIN Header_StartTask_TASK_USB_VCOM */
/**
* @brief Function implementing the TASK_USB_VCOM thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartTask_TASK_USB_VCOM */
void StartTask_TASK_USB_VCOM(void *argument)
{/* USER CODE BEGIN StartTask_TASK_USB_VCOM *//* Infinite loop */for(;;){osDelay(10);if(USB_VCOM_INDEX!=0){CDC_Transmit_FS(USB_VCOM_BUFF, USB_VCOM_INDEX);USB_VCOM_INDEX = 0;}}/* USER CODE END StartTask_TASK_USB_VCOM */
}/* LED_Timer01_Callback01 function */
void LED_Timer01_Callback01(void *argument)
{/* USER CODE BEGIN LED_Timer01_Callback01 */HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_13);/* USER CODE END LED_Timer01_Callback01 */
}/*** @brief Period elapsed callback in non blocking mode* @note This function is called when TIM1 interrupt took place, inside* HAL_TIM_IRQHandler(). It makes a direct call to HAL_IncTick() to increment* a global variable "uwTick" used as application time base.* @param htim : TIM handle* @retval None*/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{/* USER CODE BEGIN Callback 0 *//* USER CODE END Callback 0 */if (htim->Instance == TIM1) {HAL_IncTick();}/* USER CODE BEGIN Callback 1 *//* USER CODE END Callback 1 */
}/*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while (1){}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */例程测试

例程下载
STM32CUBEIDE FreeRTOS操作教程(十):interrupt on/off中断开关 例程
–End–
相关文章:
STM32CUBEIDE FreeRTOS操作教程(十):interrupt on/off中断开关
STM32CUBEIDE FreeRTOS操作教程(十):interrupt on/off中断开关 STM32CUBE开发环境集成了STM32 HAL库进行FreeRTOS配置和开发的组件,不需要用户自己进行FreeRTOS的移植。这里介绍最简化的用户操作类应用教程。以STM32F401RCT6开发…...

Linux的基本操作及虚拟机设置
文章目录 Linux的目录结构Linux中的常见目录 VI和VIM编辑器什么是VI和VIM编辑器VIM的一般模式VIM的编辑模式VIM的命令模式模式间的切换 虚拟机网络配置查看网络信息修改网络配置信息查看和修改主机名服务管理类命令 虚拟机管理操作VMware为虚拟机拍摄快照VMware为虚拟机执行克隆…...

oracle 用户手册
Oracle用户手册 一、Oracle数据库概述 定义与用途 Oracle数据库是一款功能强大的关系型数据库管理系统(RDBMS)。它用于存储和管理大量的结构化数据,广泛应用于企业级应用、金融系统、电商平台等各种需要高效数据处理和存储的场景。例如,银行使用Oracle数据库来存储客户账户…...

Flutter-Web打包后上线白屏
问题描述 Flutter上线后进行测试发现界面白屏,打开开发者模式查看网络发现加载main.js文件404 问题原因 我上线的地址是https://xxx:8091/homedots,但是我打包后的index文件中的baseUrl是"/",将地址改成”/homedots/",注意homedots后面…...

解决linux访问huggingface的问题(操作记录)
目录 一、clash软件(linux)的下载 二、clash软件(linux)的使用 三、linux命令行访问huggingface 1、问题分析 2、设置命令行代理 四、补充(windows的linux虚拟机) 五、参考链接 一、clash软件&#…...

Android Studio 右侧Gradle窗口只有test的task问题解决
目录 运行环境问题现象解决方案1、打开Settings设置界面2、设置选项3、重启Android Studio4、重新Sync工程 运行环境 Android Studio Giraffe | 2022.3.1 Patch 3 Android SDK 33 Gradle 8.0.1 JDK 17 问题现象 Android Studio右侧Gradle窗口下只有test的task,其他…...

Spring AOP 的实现和切点表达式的介绍
1. 快速入手 AOP:就是面相切面编程,切面指的就是某一类特定的问题,也可以理解为面相特定方法编程,例如之前使用的拦截器,就是 AOP 思想的一种应用,统一数据返回格式和统一异常处理也是 AOP 思想的实现方式…...
)
【赛博保安】安全日记之常用术语(一)
"企业的信息安全治理水平,直接取决于安全团队人员的技术专业度,而非运营经验值。所谓的技术,并非指渗透和挖洞的能力,而是指软件开发、IT 架构、网络拓扑相关的知识和经验。 站在乙方的角度来看,技术薄弱的安全人…...

C++ 中的 string 类:全面解析与应用实践(上)
🤖🌟 欢迎降临张有志的未来科技实验室🤖🌟 专栏:C 👨💻👩💻 先赞后看,已成习惯👨💻👩💻…...

量化交易系统开发-实时行情自动化交易-8.7.文华平台
19年创业做过一年的量化交易但没有成功,作为交易系统的开发人员积累了一些经验,最近想重新研究交易系统,一边整理一边写出来一些思考供大家参考,也希望跟做量化的朋友有更多的交流和合作。 接下来会对于文华平台介绍。 文华财经…...

美畅物联丨如何通过 FFmpeg 解码视频
FFmpeg是一款功能强大、在多媒体处理领域广泛应用的开源工具。它可以处理多种音频和视频格式,包含编码、解码、转码、流媒体处理等众多功能。前两天,我们在《美畅物联丨如何通过FFmpeg排查视频问题》一文中介绍了借助FFmpeg程序来辅助判断视频播放异常的…...

机器学习任务功略
loss如果大,训练资料没有学好,此时有两个可能: 1.model bias太过简单(找不到loss低的function)。 解决办法:增加输入的feacture,设一个更大的model,也可以用deep learning增加弹性…...

Web Worker 和 WebSocket的区别
Web Worker(消息传递机制) 定义:是为了在浏览器中提供多线程支持,允许 JavaScript 在后台线程运行,而不阻塞主线程。它非常适合执行耗时的计算任务或处理大量数据,避免主线程(通常是 UI 线程&a…...

JMeter实时性能压测可视化系统整合
一、相关工具简介: JMeter、Grafana 和 InfluxDB 结合实时地收集、分析和展示性能测试数据,进行更好地理解系统的性能表现,及时发现潜在问题并进行优化。 1,JMeter 实时生成性能数据,并将其发送到 InfluxDB 进行存储。2,InfluxDB 存储的数据。3,通过Grafana的仪表板,用…...

无限加载和懒加载及路由滚动及路由滚动不生效
这里写目录标题 列表无限加载懒加载定制路由滚动使用scrollBehavior不起效不管用的原因使用scrollTo来实现路由滚动elMain && elMain.scrollTo(...) 的作用是: 无限加载和懒加载的区别 列表无限加载 无限加载功能在现代网页和移动应用中广泛应用࿰…...

CSS底层基础:小白速来
1. CSS简介 CSS (Cascading Style Sheets) 是一种用来描述HTML或XML文档样式的语言。它使得开发者能够控制网页的布局和外观,包括字体、颜色、间距等。CSS通过选择器来指定要应用样式的元素,并定义这些元素的具体样式属性。 基本结构示例: …...

【MySQL 进阶之路】索引概述
第06章_索引 1.什么是索引 索引是存储引擎用于快速找到数据记录的一种数据结构,就好比一本教科书的目录部分,通过目录中找到对应文章的页码,便可快速定位到需要的文章。MySQL中也是一样的道理,进行数据查找时,首先查…...

【C++boost::asio网络编程】有关异步读写api的笔记
异步读写api 异步写操作async_write_someasync_send 异步读操作async_read_someasync_receive 定义一个Session类,主要是为了服务端专门为客户端服务创建的管理类 class Session { public:Session(std::shared_ptr<asio::ip::tcp::socket> socket);void Conn…...

Elasticsearch 的存储与查询
Elasticsearch 的存储与查询 在搜索系统领域,数据的存储与查询是两个最基础且至关重要的环节。Elasticsearch(ES) 在这两方面进行了深度优化,使其在关系型数据库或非关系型数据库中脱颖而出,成为搜索系统的首选。 映射 (Mapping) 映射 (Ma…...

008静态路由-特定主机路由
按照如上配置,用192.168.0.1 电脑ping 192.168.1.1 发现能够ping通 用192.168.0.1 电脑ping 192.168.2.1 发现不能ping通 这是因为192.168.0.1 和 192.168.1.1 使用的是同一个路由器R1。 192.168.0.1 和 192.168.2.1 通信需要先经过R1,再经过R2 …...

Java如何权衡是使用无序的数组还是有序的数组
在 Java 中,选择有序数组还是无序数组取决于具体场景的性能需求与操作特点。以下是关键权衡因素及决策指南: ⚖️ 核心权衡维度 维度有序数组无序数组查询性能二分查找 O(log n) ✅线性扫描 O(n) ❌插入/删除需移位维护顺序 O(n) ❌直接操作尾部 O(1) ✅内存开销与无序数组相…...

Qwen3-Embedding-0.6B深度解析:多语言语义检索的轻量级利器
第一章 引言:语义表示的新时代挑战与Qwen3的破局之路 1.1 文本嵌入的核心价值与技术演进 在人工智能领域,文本嵌入技术如同连接自然语言与机器理解的“神经突触”——它将人类语言转化为计算机可计算的语义向量,支撑着搜索引擎、推荐系统、…...

unix/linux,sudo,其发展历程详细时间线、由来、历史背景
sudo 的诞生和演化,本身就是一部 Unix/Linux 系统管理哲学变迁的微缩史。来,让我们拨开时间的迷雾,一同探寻 sudo 那波澜壮阔(也颇为实用主义)的发展历程。 历史背景:su的时代与困境 ( 20 世纪 70 年代 - 80 年代初) 在 sudo 出现之前,Unix 系统管理员和需要特权操作的…...
html-<abbr> 缩写或首字母缩略词
定义与作用 <abbr> 标签用于表示缩写或首字母缩略词,它可以帮助用户更好地理解缩写的含义,尤其是对于那些不熟悉该缩写的用户。 title 属性的内容提供了缩写的详细说明。当用户将鼠标悬停在缩写上时,会显示一个提示框。 示例&#x…...
【C++进阶篇】智能指针
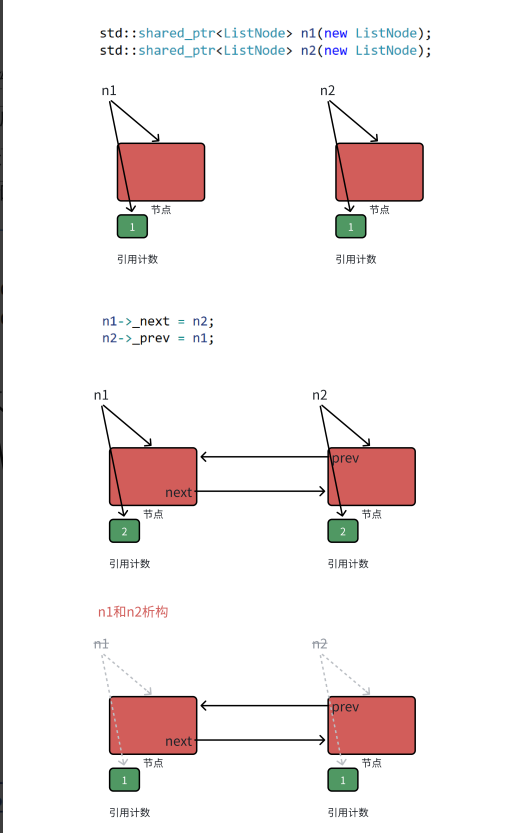
C内存管理终极指南:智能指针从入门到源码剖析 一. 智能指针1.1 auto_ptr1.2 unique_ptr1.3 shared_ptr1.4 make_shared 二. 原理三. shared_ptr循环引用问题三. 线程安全问题四. 内存泄漏4.1 什么是内存泄漏4.2 危害4.3 避免内存泄漏 五. 最后 一. 智能指针 智能指…...

解决:Android studio 编译后报错\app\src\main\cpp\CMakeLists.txt‘ to exist
现象: android studio报错: [CXX1409] D:\GitLab\xxxxx\app.cxx\Debug\3f3w4y1i\arm64-v8a\android_gradle_build.json : expected buildFiles file ‘D:\GitLab\xxxxx\app\src\main\cpp\CMakeLists.txt’ to exist 解决: 不要动CMakeLists.…...
android RelativeLayout布局
<?xml version"1.0" encoding"utf-8"?> <RelativeLayout xmlns:android"http://schemas.android.com/apk/res/android"android:layout_width"match_parent"android:layout_height"match_parent"android:gravity&…...
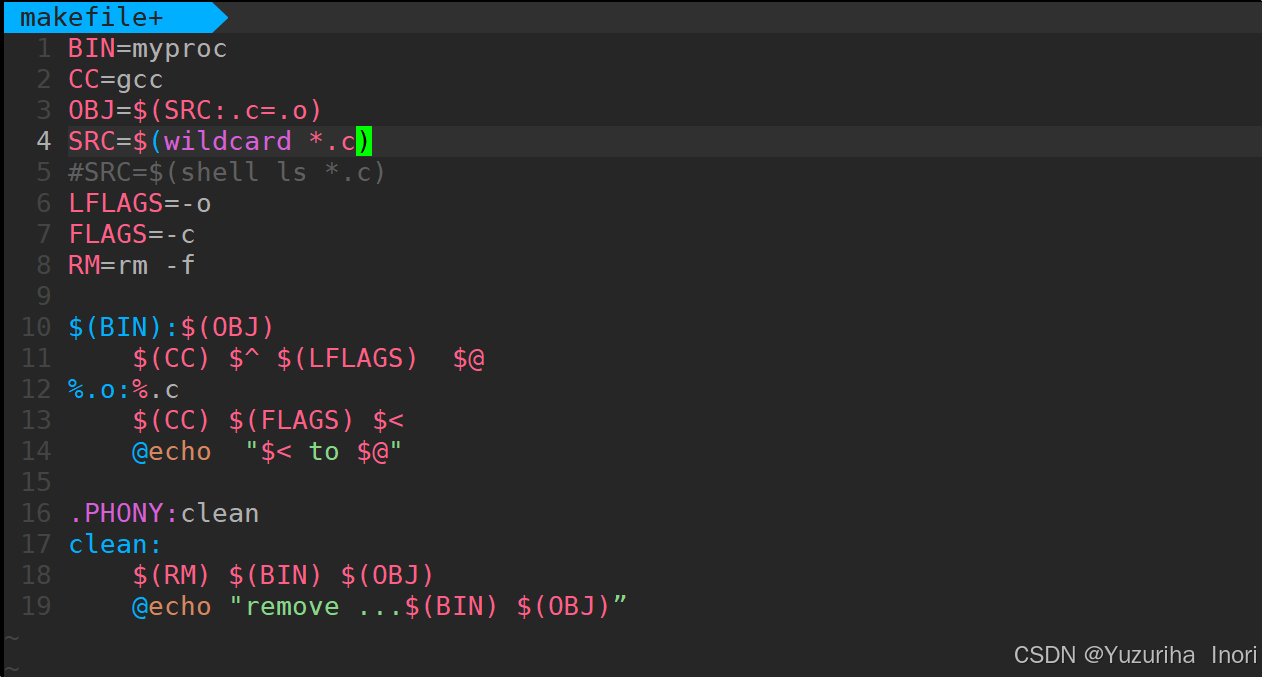
【Linux】自动化构建-Make/Makefile
前言 上文我们讲到了Linux中的编译器gcc/g 【Linux】编译器gcc/g及其库的详细介绍-CSDN博客 本来我们将一个对于编译来说很重要的工具:make/makfile 1.背景 在一个工程中源文件不计其数,其按类型、功能、模块分别放在若干个目录中,mak…...

CVPR2025重磅突破:AnomalyAny框架实现单样本生成逼真异常数据,破解视觉检测瓶颈!
本文介绍了一种名为AnomalyAny的创新框架,该方法利用Stable Diffusion的强大生成能力,仅需单个正常样本和文本描述,即可生成逼真且多样化的异常样本,有效解决了视觉异常检测中异常样本稀缺的难题,为工业质检、医疗影像…...

用鸿蒙HarmonyOS5实现中国象棋小游戏的过程
下面是一个基于鸿蒙OS (HarmonyOS) 的中国象棋小游戏的实现代码。这个实现使用Java语言和鸿蒙的Ability框架。 1. 项目结构 /src/main/java/com/example/chinesechess/├── MainAbilitySlice.java // 主界面逻辑├── ChessView.java // 游戏视图和逻辑├──…...