基于Matlab卡尔曼滤波的GPS/INS集成导航系统研究与实现
随着智能交通和无人驾驶技术的迅猛发展,精确可靠的导航系统已成为提升车辆定位精度与安全性的重要技术。全球定位系统(GPS)和惯性导航系统(INS)在导航应用中各具优势:GPS提供全球定位信息,而INS则通过加速度计和陀螺仪等传感器实现高频率、高精度的短期姿态和位置估计。然而,由于GPS信号易受遮挡与干扰,INS误差会随时间累积,单一传感器在复杂环境下的应用效果有限。因此,本文提出并实现了一种基于卡尔曼滤波的GPS/INS集成导航系统,旨在通过传感器融合弥补单一导航系统的不足,提高定位精度和系统鲁棒性。
本文首先介绍了卡尔曼滤波算法在GPS/INS集成导航中的应用,重点讲解了如何利用卡尔曼滤波对GPS和INS数据进行融合,以精确估计位置、速度和姿态。具体地,使用卡尔曼滤波优化了位置、速度和姿态的估计过程,通过对GPS与INS数据的时空融合,实现了在GPS信号弱或失效情况下的高精度导航。此外,本文采用四元数方法对姿态进行表示,避免了欧拉角可能带来的奇异性问题,并在卡尔曼滤波框架下完成了各个传感器数据的融合和误差修正。
通过与单独使用GPS或INS的系统对比,实验结果验证了所提出的集成导航系统在动态环境下的优越性能,尤其在GPS信号弱或完全丢失的情况下,系统依然能保持较高的导航精度和稳定性。最后,本文提出了进一步提升系统性能的研究方向,包括结合其他传感器(如视觉、雷达等)的数据融合,以期为未来的导航技术发展提供理论依据和技术支持。
算法流程

运行效果
运行 main_NAV.m
图1:该图展示了由GPS和INS数据融合后得到的动态姿态估计中的欧拉角变化

表现:欧拉角的计算值与参考值几乎完全重合,表明导航系统在姿态估计方面精度很高。系统能够平稳地跟踪飞行器的横滚、俯仰和偏航角变化,没有出现明显的误差或漂移。
评价:系统在姿态估计上表现非常好,能够精确估计飞行器的姿态变化,适用于高精度的动态控制。
图2:该图展示了GPS与INS融合导航中经度测量结果的对比分析

表现:计算值和参考值基本重合,精度较高。即使在快速变化的时段,系统依然能保持准确的跟踪,误差极小。
评价:系统的经度估计精度优秀,能够准确捕捉到经度的细微变化,稳定性和实时性表现很好。
图3:展示了GPS与INS融合导航中的纬度估计对比图

表现:计算值与参考值曲线高度重合,表现出相同的快速变化和稳定性。系统能够在复杂的轨迹变化中保持较高的精度。
评价:纬度估计方面,系统表现优秀,能够适应载体的动态变化,且误差几乎不可察觉。
图4:展示GPS与INS组合导航系统在高度(海拔)方面的对比图

表现:高度值也高度吻合,尽管有一些明显的波动,但总体变化和参考值一致。系统能够准确捕捉高度的波动,并在快速变化时表现良好。
评价:系统能够准确估计高度变化,适用于高精度的垂直运动跟踪和高度控制。
图5:显示GPS与INS组合系统在北向速度的估计结果对比

表现:计算值和参考值在大多数时间内高度一致。尽管速度有明显的加速和减速过程,但系统的响应很快,能够跟踪速度的快速变化。
评价:北向速度估计效果很好,系统能准确捕捉到载体的速度变化,特别是转向或避障时的加减速。
图6:显示GPS与INS组合系统在东向速度的估计结果对比

表现:东向速度变化较大,但系统能够快速响应并准确估计速度变化。特别是当速度剧烈变化时,计算值和参考值依然吻合。
评价:东向速度估计非常精确,系统能够处理快速变速的运动,并及时跟踪载体的东向运动状态。
图7:显示GPS与INS组合系统在地向速度的估计结果对比

表现:地向速度变化较小,但系统能够准确地跟踪每个垂直运动变化,尤其在快速变化时,误差控制得很好。
评价:地向速度估计方面系统表现良好,能够准确追踪垂直运动,适用于高度控制和复杂环境中的垂直变化。
总结:
(1)从这些图表来看,导航系统在姿态估计、定位精度、速度变化跟踪等方面均表现出色,能够准确估计载体的动态状态。特别是在快速变化和复杂运动状态下,系统能够实时调整并提供高精度的反馈,几乎没有明显的误差或漂移。
(2)这些结果表明,导航系统具有很强的鲁棒性和实时性,适用于复杂环境中的高精度运动估计,特别是在无人驾驶、飞行器导航等领域,可以提供可靠的支持和高效的性能。
相关文章:
基于Matlab卡尔曼滤波的GPS/INS集成导航系统研究与实现
随着智能交通和无人驾驶技术的迅猛发展,精确可靠的导航系统已成为提升车辆定位精度与安全性的重要技术。全球定位系统(GPS)和惯性导航系统(INS)在导航应用中各具优势:GPS提供全球定位信息,而INS…...
《只狼》运行时提示“mfc140u.dll文件缺失”是什么原因?“找不到mfc140u.dll文件”要怎么解决?教你几招轻松搞定
《只狼》运行时提示“mfc140u.dll文件缺失”的科普与解决方案 作为一名软件开发从业者,在游戏开发和维护过程中,我们经常会遇到各种运行时错误和系统报错。今天,我们就来探讨一下《只狼》这款游戏在运行时提示“mfc140u.dll文件缺失”的原因…...

C语言:指针与数组
一、. 数组名的理解 int arr[5] { 0,1,2,3,4 }; int* p &arr[0]; 在之前我们知道要取一个数组的首元素地址就可以使用&arr[0],但其实数组名本身就是地址,而且是数组首元素的地址。在下图中我们就通过测试看出,结果确实如此。 可是…...

win11无法检测到其他显示器-NVIDIA
https://www.nvidia.cn/software/nvidia-app/ https://cn.download.nvidia.cn/nvapp/client/11.0.1.163/NVIDIA_app_v11.0.1.163.exe 下载安装后,检测驱动、更新驱动。...

SQLite:DDL(数据定义语言)的基本用法
SQLite:DDL(数据定义语言)的基本用法 1 主要内容说明2 相关内容说明2.1 创建表格(create table)2.1.1 SQLite常见的数据类型2.1.1.1 integer(整型)2.1.1.2 text(文本型)2…...

AI工具集:一站式1000+人工智能工具导航站
在当今数字化时代,人工智能(AI)技术的飞速发展催生了众多实用的AI工具,但面对如此多的选择,想要找到适合自己的高质量AI工具却并非易事。网络搜索往往充斥着推广内容,真正有价值的信息被淹没其中。为了解决…...

视觉处理基础2
目录 1.池化层 1.1 概述 1.2 池化层计算 1.3 步长Stride 1.4 边缘填充Padding 1.5 多通道池化计算 1.6 池化层的作用 2. 卷积拓展 2.1 二维卷积 2.1.1 单通道版本 2.1.2 多通道版本 2.2 三维卷积 2.3 反卷积 2.4 空洞卷积(膨胀卷积) 2.5 …...

代码随想录第十四天|二叉树part02--226.翻转二叉树、101.对称二叉树、104.二叉树的最大深度、111.二叉树的最小深度
资料引用: 226.翻转二叉树(226.翻转二叉树) 101.对称二叉树(101.对称二叉树) 104.二叉树的最大深度(104.二叉树的最大深度) 111.二叉树的最小深度(111.二叉树的最小深度)…...

vue基础之7:天气案例、监视属性、深度监视、监视属性(简写)
欢迎来到“雪碧聊技术”CSDN博客! 在这里,您将踏入一个专注于Java开发技术的知识殿堂。无论您是Java编程的初学者,还是具有一定经验的开发者,相信我的博客都能为您提供宝贵的学习资源和实用技巧。作为您的技术向导,我将…...

JS实现高效导航——A*寻路算法+导航图简化法
一、如何实现两点间路径导航 导航实现的通用步骤,一般是: 1、网格划分 将地图划分为网格,即例如地图是一张图片,其像素为1000*1000,那我们将此图片划分为各个10*10的网格,从而提高寻路算法的计算量。 2、标…...

Spring Authorization Server登出说明与实践
本章内容概览 Spring Security提供的/logout登出接口做了什么与如何自定义。Spring Authorization Server提供的/connect/logout登出接口做了什么与如何自定义。Spring Authorization Server提供的/oauth2/revoke撤销token接口做了什么与如何自定义。 前言 既然系统中有登录功…...

浏览器报错 | 代理服务器可能有问题,或地址不正确
1 问题描述 Windows连网情况下,浏览器访问地址显示“你尚未连接,代理服务器可能有问题,或地址不正确。”出现如下画面: 2 解决方法 途径1 控制面板-->网络与internet-->internet选项-->Internet属性-->连接-->…...

泷羽sec:shell编程(9)不同脚本的互相调用和重定向操作
声明: 学习视频来自B站up主 泷羽sec 有兴趣的师傅可以关注一下,如涉及侵权马上删除文章,笔记只是方便各位师傅的学习和探讨,文章所提到的网站以及内容,只做学习交流,其他均与本人以及泷羽sec团队无关&#…...
Milvus×OPPO:如何构建更懂你的大模型助手
01. 背景 AI业务快速增长下传统关系型数据库无法满足需求。 2024年恰逢OPPO品牌20周年,OPPO也宣布正式进入AI手机的时代。超千万用户开始通过例如通话摘要、新小布助手、小布照相馆等搭载在OPPO手机上的应用体验AI能力。 与传统的应用不同的是,在AI驱动的…...

单片机几大时钟源
在单片机中,MSI、HSI和HSE通常指的是用于内部晶振配置的不同功能模块: MSI (Master Oscillator System Interface):这是最低级的一种时钟源管理单元,它控制着最基本的系统时钟(SYSCLK),一般由外…...

reverse学习总结(12)
一.[FlareOn4]IgniteMe1 https://files.buuoj.cn/files/02b39b8efca02367af23aa279c81cbec/attachment.zip 根据汇编语言分析 查看需要返回为1的函数 int sub_401050() {int v1; // [esp0h] [ebp-Ch]int i; // [esp4h] [ebp-8h]unsigned int j; // [esp4h] [ebp-8h]char v4; …...

基于“微店 Park”模式下 2+1 链动模式商城小程序的创新发展与应用研究
摘要:本文以“微店 Park”从“开店工具”向“众创平台”的转型为背景,深入探讨 21 链动模式商城小程序在该平台情境下的应用潜力与创新发展路径。通过剖析“微店 Park”的运营模式,包括灵活承租、低成本入驻、多元流量引流等特点,…...

C++11:【列表初始化】【右值引用和移动语义】
目录 一.列表初始化 1.1 C98传统的{} 1.2C11中的{} 1.3C中的std::initializer_list 二.右值引用和移动语义 2.1左值和右值 2.2左值引用和右值引用 2.3引用延长生命周期 2.4左值和右值的参数匹配 2.5右值引用和移动语义的使用场景 2.5.1左值引用主要使用场景 2.5.2移…...

Zookeeper的通知机制是什么?
大家好,我是锋哥。今天分享关于【Zookeeper的通知机制是什么?】面试题。希望对大家有帮助; Zookeeper的通知机制是什么? 1000道 互联网大厂Java工程师 精选面试题-Java资源分享网 Zookeeper的通知机制主要通过Watcher实现,它是Zookeeper客…...

嵌入式蓝桥杯学习1 电量LED
cubemx配置 1.新建一个STM32G431RBT6文件 2.在System-Core中点击SYS,找到Debug(设置为Serial Wire) 3.在System-Core中点击RCC,找到High Speed Clock(设置为Crystal/Ceramic Resonator) 4.打开Clock Configuration ࿰…...

19c补丁后oracle属主变化,导致不能识别磁盘组
补丁后服务器重启,数据库再次无法启动 ORA01017: invalid username/password; logon denied Oracle 19c 在打上 19.23 或以上补丁版本后,存在与用户组权限相关的问题。具体表现为,Oracle 实例的运行用户(oracle)和集…...
Lombok 的 @Data 注解失效,未生成 getter/setter 方法引发的HTTP 406 错误
HTTP 状态码 406 (Not Acceptable) 和 500 (Internal Server Error) 是两类完全不同的错误,它们的含义、原因和解决方法都有显著区别。以下是详细对比: 1. HTTP 406 (Not Acceptable) 含义: 客户端请求的内容类型与服务器支持的内容类型不匹…...

ES6从入门到精通:前言
ES6简介 ES6(ECMAScript 2015)是JavaScript语言的重大更新,引入了许多新特性,包括语法糖、新数据类型、模块化支持等,显著提升了开发效率和代码可维护性。 核心知识点概览 变量声明 let 和 const 取代 var…...

逻辑回归:给不确定性划界的分类大师
想象你是一名医生。面对患者的检查报告(肿瘤大小、血液指标),你需要做出一个**决定性判断**:恶性还是良性?这种“非黑即白”的抉择,正是**逻辑回归(Logistic Regression)** 的战场&a…...
)
Java入门学习详细版(一)
大家好,Java 学习是一个系统学习的过程,核心原则就是“理论 实践 坚持”,并且需循序渐进,不可过于着急,本篇文章推出的这份详细入门学习资料将带大家从零基础开始,逐步掌握 Java 的核心概念和编程技能。 …...

使用 Streamlit 构建支持主流大模型与 Ollama 的轻量级统一平台
🎯 使用 Streamlit 构建支持主流大模型与 Ollama 的轻量级统一平台 📌 项目背景 随着大语言模型(LLM)的广泛应用,开发者常面临多个挑战: 各大模型(OpenAI、Claude、Gemini、Ollama)接口风格不统一;缺乏一个统一平台进行模型调用与测试;本地模型 Ollama 的集成与前…...
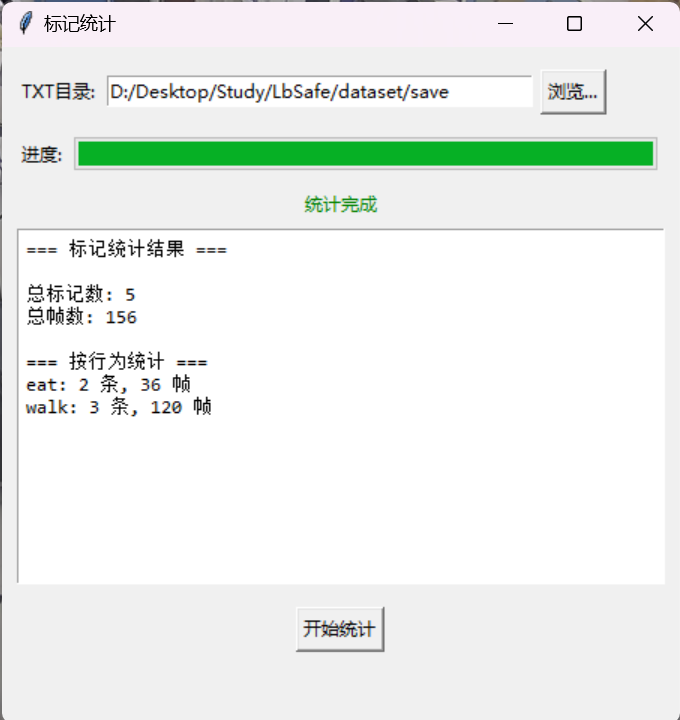
视频行为标注工具BehaviLabel(源码+使用介绍+Windows.Exe版本)
前言: 最近在做行为检测相关的模型,用的是时空图卷积网络(STGCN),但原有kinetic-400数据集数据质量较低,需要进行细粒度的标注,同时粗略搜了下已有开源工具基本都集中于图像分割这块,…...

Linux 中如何提取压缩文件 ?
Linux 是一种流行的开源操作系统,它提供了许多工具来管理、压缩和解压缩文件。压缩文件有助于节省存储空间,使数据传输更快。本指南将向您展示如何在 Linux 中提取不同类型的压缩文件。 1. Unpacking ZIP Files ZIP 文件是非常常见的,要在 …...

PostgreSQL——环境搭建
一、Linux # 安装 PostgreSQL 15 仓库 sudo dnf install -y https://download.postgresql.org/pub/repos/yum/reporpms/EL-$(rpm -E %{rhel})-x86_64/pgdg-redhat-repo-latest.noarch.rpm# 安装之前先确认是否已经存在PostgreSQL rpm -qa | grep postgres# 如果存在࿰…...

Python竞赛环境搭建全攻略
Python环境搭建竞赛技术文章大纲 竞赛背景与意义 竞赛的目的与价值Python在竞赛中的应用场景环境搭建对竞赛效率的影响 竞赛环境需求分析 常见竞赛类型(算法、数据分析、机器学习等)不同竞赛对Python版本及库的要求硬件与操作系统的兼容性问题 Pyth…...