ros2人脸检测
第一步:
首先在工作空间/src下创建数据结构目录service_interfaces
ros2 pkg create service_interfaces --build-type ament_cmake然后再创建一个srv目录
在里面创建FaceDetect.srv(注意,首字母要大写)
sensor_msgs/Image photo
---
uint16 number
float32 use_timeint32[] top
int32[] right
int32[] bottom
int32[] leftCmakeList.txt
cmake_minimum_required(VERSION 3.8)
project(service_interfaces)if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")add_compile_options(-Wall -Wextra -Wpedantic)
endif()# find dependencies
find_package(ament_cmake REQUIRED)
# uncomment the following section in order to fill in
# further dependencies manually.
# find_package(<dependency> REQUIRED)
# 添加依赖
find_package(sensor_msgs REQUIRED) # 确保这个包在这里被找到
# 声明srv文件所属的工程名字, 文件位置, 依赖DEPENDENCIES
find_package(rosidl_default_generators REQUIRED)
rosidl_generate_interfaces(${PROJECT_NAME}"srv/FaceDetect.srv"DEPENDENCIES sensor_msgs )if(BUILD_TESTING)find_package(ament_lint_auto REQUIRED)# the following line skips the linter which checks for copyrights# comment the line when a copyright and license is added to all source filesset(ament_cmake_copyright_FOUND TRUE)# the following line skips cpplint (only works in a git repo)# comment the line when this package is in a git repo and when# a copyright and license is added to all source filesset(ament_cmake_cpplint_FOUND TRUE)ament_lint_auto_find_test_dependencies()
endif()ament_package()

package.xml
加上依赖
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3"><name>service_interfaces</name><version>0.0.0</version><description>TODO: Package description</description><maintainer email="root@todo.todo">root</maintainer><license>TODO: License declaration</license><buildtool_depend>ament_cmake</buildtool_depend><depend>sensor_msgs</depend><build_depend>rosidl_default_generators</build_depend><exec_depend>rosidl_default_runtime</exec_depend><member_of_group>rosidl_interface_packages</member_of_group><test_depend>ament_lint_auto</test_depend><test_depend>ament_lint_common</test_depend><export><build_type>ament_cmake</build_type></export>
</package>
第二步:
要准备好人脸识别的库,不懂的可以看我的另一篇文章《Ubuntu如何使用pip》
要安装好face_recognition的库
pip install face_recognition安装成功后即可
第三步
在工作空间/src下创建功能包
ros2 pkg create hj_service --build-type ament_cmake --dependencies rclcpp service_interfaces接着创建face_detect_client.py
在这个代码里面,你需要准备好一张里面有人脸的图片
import rclpy
from rclpy.node import Node
from service_interfaces.srv import FaceDetect
from sensor_msgs.msg import Image
from cv_bridge import CvBridge, CvBridgeError
import cv2
import sysclass FaceDetectClientNode(Node):def __init__(self):super().__init__('face_detect_client_node')self.client = self.create_client(FaceDetect, 'face_detect_service')while not self.client.wait_for_service(timeout_sec=1.0):self.get_logger().info('Service not available, waiting again...')self.bridge = CvBridge()self.cv_image = None # 初始化cv_image为类属性def send_request(self, image_path):try:# 读取图像文件self.cv_image = cv2.imread(image_path) # 保存cv_image为类属性if self.cv_image is None:self.get_logger().info('Failed to read image')return# 将OpenCV图像转换为ROS图像消息msg = self.bridge.cv2_to_imgmsg(self.cv_image, encoding="bgr8")# 构建服务请求request = FaceDetect.Request()request.photo = msg# 调用服务self.future = self.client.call_async(request)except CvBridgeError as e:self.get_logger().info('CvBridge Error: {0}'.format(e))def get_response(self):while rclpy.ok():rclpy.spin_once(self)if self.future.done():try:response = self.future.result()except Exception as e:self.get_logger().info('Service call failed %r' % (e,))else:self.get_logger().info('Service response: use_time: %f, number: %d' % (response.use_time, response.number))for i in range(response.number):self.get_logger().info('Face %d: top: %d, right: %d, bottom: %d, left: %d' %(i, response.top[i], response.right[i], response.bottom[i], response.left[i]))# 绘制人脸边框for i in range(response.number):top = response.top[i]right = response.right[i]bottom = response.bottom[i]left = response.left[i]cv2.rectangle(self.cv_image, (left, top), (right, bottom), (0, 255, 0), 2)# 显示图像cv2.imshow('Detected Faces', self.cv_image)cv2.waitKey(0) # 等待按键cv2.destroyAllWindows() # 关闭所有窗口breakdef main(args=None):rclpy.init(args=args)node = FaceDetectClientNode()# 替换'image.jpg'为你的图像文件路径node.send_request('/home/phj/Downloads/test.jpeg')node.get_response()node.destroy_node()rclpy.shutdown()if __name__ == '__main__':main()face_detect_server.py
import rclpy
from rclpy.node import Node
from service_interfaces.srv import FaceDetect
from sensor_msgs.msg import Image
from cv_bridge import CvBridge, CvBridgeError
import cv2
import face_recognition
import timeclass FaceDetectServerNode(Node):def __init__(self, node_name):super().__init__(node_name)self.service = self.create_service(FaceDetect, 'face_detect_service', self.face_detect_callback)self.bridge = CvBridge()self.get_logger().info('Service created.')def face_detect_callback(self, request, response):if request.photo.data:try:cv_image = self.bridge.imgmsg_to_cv2(request.photo, "bgr8")except CvBridgeError as e:self.get_logger().info('CvBridge Error: %s' % e)returnelse:self.get_logger().info("No image data received")returnstart = time.time()face_locations = face_recognition.face_locations(cv_image, model="hog")response.use_time = time.time() - startresponse.number = len(face_locations)# Initialize lists in the responseresponse.top = []response.right = []response.bottom = []response.left = []for (top, right, bottom, left) in face_locations:response.top.append(top)response.right.append(right)response.bottom.append(bottom)response.left.append(left)return responsedef main(args=None):rclpy.init(args=args)node = FaceDetectServerNode('face_detect_server_node')rclpy.spin(node)node.destroy_node()rclpy.shutdown()if __name__ == '__main__':main()package.xml
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3"><name>hj_service</name><version>0.0.0</version><description>TODO: Package description</description><maintainer email="root@todo.todo">root</maintainer><license>TODO: License declaration</license><depend>rclpy</depend><depend>service_interfaces</depend><depend>sensor_msgs</depend><test_depend>ament_copyright</test_depend><test_depend>ament_flake8</test_depend><test_depend>ament_pep257</test_depend><test_depend>python3-pytest</test_depend><export><build_type>ament_python</build_type></export>
</package>

setup.py
from setuptools import find_packages, setuppackage_name = 'hj_service'setup(name=package_name,version='0.0.0',packages=find_packages(exclude=['test']),data_files=[('share/ament_index/resource_index/packages',['resource/' + package_name]),('share/' + package_name, ['package.xml']),],install_requires=['setuptools'],zip_safe=True,maintainer='root',maintainer_email='root@todo.todo',description='TODO: Package description',license='TODO: License declaration',tests_require=['pytest'],entry_points={'console_scripts': ['service = hj_service.service_member_function:main','client = hj_service.client_member_function:main','param_sample = hj_service.param:main',"face_detect_server_node = hj_service.face_detect_server:main","face_detect_client_node = hj_service.face_detect_client:main"],},
)

第四步:
打开一个终端
ros2 run hj_service face_detect_server_node

打开另一个终端
ros2 run hj_service face_detect_client_node

成功!
相关文章:
ros2人脸检测
第一步: 首先在工作空间/src下创建数据结构目录service_interfaces ros2 pkg create service_interfaces --build-type ament_cmake 然后再创建一个srv目录 在里面创建FaceDetect.srv(注意,首字母要大写) sensor_msgs/Image …...

Pillow:强大的Python图像处理库
目录 一、引言 二、Pillow 库的安装 三、Pillow 库的基本概念 四、图像的读取和保存 五、图像的基本属性 六、图像的裁剪、缩放和旋转 七、图像的颜色调整 八、图像的滤镜效果 九、图像的合成和叠加 十、图像的绘制 十一、示例程序:制作图片水印 十二、…...

微信小程序uni-app+vue3实现局部上下拉刷新和scroll-view动态高度计算
微信小程序uni-appvue3实现局部上下拉刷新和scroll-view动态高度计算 前言 在uni-appvue3项目开发中,经常需要实现列表的局部上下拉刷新功能。由于网上相关教程较少且比较零散,本文将详细介绍如何使用scroll-view组件实现这一功能,包括动态高度计算、下拉刷新、上拉加载等完整…...

为什么类 UNIX 操作系统通常内置编译器?为什么 Windows 更倾向于直接使用二进制文件?
操作系统是否内置编译器,取决于该系统的设计目标、用户群体以及常见的使用场景。以下是内置编译器和直接使用二进制的设计理念和原因的分析: 为什么类 UNIX 操作系统通常内置编译器? 面向开发者的需求: 类 UNIX 系统(如…...

吉林大学23级数据结构上机实验(第7周)
A 去火车站 寒假到了,小明准备坐火车回老家,现在他从学校出发去火车站,CC市去火车站有两种方式:轻轨和公交车。小明为了省钱,准备主要以乘坐公交为主。CC市还有一项优惠政策,持学生证可以免费乘坐一站轻轨&…...

实验13 使用预训练resnet18实现CIFAR-10分类
1.数据预处理 首先利用函数transforms.Compose定义了一个预处理函数transform,里面定义了两种操作,一个是将图像转换为Tensor,一个是对图像进行标准化。然后利用函数torchvision.datasets.CIFAR10下载数据集,这个函数有四个常见的…...

【开发文档】资源汇总,持续更新中......
文章目录 AI大模型数据集PytorchPythonUltralyticsOpenCVNetronSklearnCMakeListsNVIDIADocker刷题网站持续更新,欢迎补充 本文汇总了一些常用的开发文档资源,涵盖了常用AI大模型、刷题网站、Python、Pytorch、OpenCV、TensorRT、Docker 等技术栈。通过这…...
)
【k8s实践】 创建第一个Pod(Nginx)
环境 Rocky Linux9.4 x86_64 VM安装了Microk8s (参考:Microk8s安装方法) 说明: 其他k8s(例如: k3s, kubernetes)创建Pod的方法和Microk8s没啥区别,可以参考本文 目标 创建一个Nginx的Pod,映射宿主机30000端口到Pod容器的80端口;客户端能通…...

盘古大模型实战
0 前言 前一段时间,在学习人工智能的同时,也去了解了一下几乎是作为人工智能在气象上应用的一大里程碑式的研究成果-华为盘古气象大模型。正是盘古大模型的出现,促使天气预报的未来发展方向多了个除天气学方法、统计学方法、数值预报方法之外…...

Python subprocess.run 使用注意事项,避免出现list index out of range
在执行iOS UI 自动化专项测试的时候,在运行第一遍的时候遇到了这样的错误: 2024-12-04 20:22:27 ERROR conftest pytest_runtest_makereport 106 Test test_open_stream.py::TestOpenStream::test_xxx_open_stream[iPhoneX-xxx-1-250] failed with err…...

包管理器npm,cnpm,yarn和pnpm
npm (Node Package Manager) 核心技术与工作原理 依赖解析: 广度优先搜索(BFS):npm 使用 BFS 算法来解析依赖树,尽量扁平化 node_modules 目录以减少重复的依赖项。冲突处理:如果两个包需要同一个依赖的不…...

树莓派4B使用opencv读取摄像头配置指南
本文自己记录,给我们lab自己使用,其他朋友们不一定完全适配,请酌情参考。 一. 安装opecnv 我们的树莓派4B默认是armv7l架构,安装的miniconda最新的版本 Miniconda3-latest-Linux-armv7l.sh 仍然是python3.4几乎无法使用ÿ…...

Spring Boot 进阶话题:部署
部署是将应用程序从开发环境移动到可以供用户访问的生产环境的过程。Spring Boot提供了多种部署选项,包括打包为可执行jar文件,使用Docker容器化,以及部署到云平台。 打包Spring Boot应用 Spring Boot应用可以打包为包含所有依赖、类和资源…...

Python 3 和 MongoDB 的集成使用
Python 3 和 MongoDB 的集成使用 MongoDB 是一个流行的 NoSQL 数据库,以其灵活的数据模型和强大的查询功能而闻名。Python 3 作为一种广泛使用的编程语言,与 MongoDB 的集成变得日益重要。本文将介绍如何在 Python 3 环境中集成和使用 MongoDBÿ…...

perl语言中模式匹配的左右关系
这里简单记录一下,在perl语言中,关于模式匹配的一个细节: 在进行模式匹配的时候,左边写需要查找的字符串,右侧写匹配的关键字. 两边的顺序不一样就会导致匹配结果不一样. 测试代码:…...
接口iactiveEnterMeeting存在信息泄露漏洞)
【漏洞复现】网动统一通信平台(ActiveUC)接口iactiveEnterMeeting存在信息泄露漏洞
🏘️个人主页: 点燃银河尽头的篝火(●’◡’●) 如果文章有帮到你的话记得点赞👍+收藏💗支持一下哦 @TOC 一、漏洞概述 1.1漏洞简介 漏洞名称:网动统一通信平台(ActiveUC)接口iactiveEnterMeeting存在信息泄露漏洞漏洞编号:无漏洞类型:信息泄露漏洞威胁等级:高危影…...

C++ STL 容器系列(三)list —— 编程世界的万能胶,数据结构中的百变精灵
STL系列学习参考: C STL系列__zwy的博客-CSDN博客https://blog.csdn.net/bite_zwy/category_12838593.html 学习C STL的三个境界,会用,明理,能扩展,STL中的所有容器都遵循这个规律,下面我们就按照这三个境…...
2025)
Java经典面试题总结(附答案)2025
点击获取PDF版 10、如何将字符串反转? 添加到StringBuilder中,然后调用reverse()。 11、String 类的常用方法都有那些? equals、length、contains、replace、split、hashcode、indexof、substring、trim、toUpperCase、toLowerCase、isEmpt…...

Stylus 浏览器扩展开发-Cursor AI辅助
项目起源 作为一个经常需要长时间盯着屏幕的开发者,我一直在寻找一个简单的方法来保护眼睛。最初的想法很简单:将网页背景色替换成护眼的豆沙绿。虽然市面上已经有类似的扩展,但我想要一个更加轻量且可定制的解决方案。 这个简单的需求逐渐…...

DAY35|动态规划Part03|LeetCode:01背包问题 二维、01背包问题 一维、416. 分割等和子集
目录 01背包理论基础(一) 基本思路 C代码 01背包理论基础(二) 基本思路 C代码 LeetCode:416. 分割等和子集 基本思路 C代码 01背包理论基础(一) 题目链接:卡码网46. 携带研究材料 文字…...
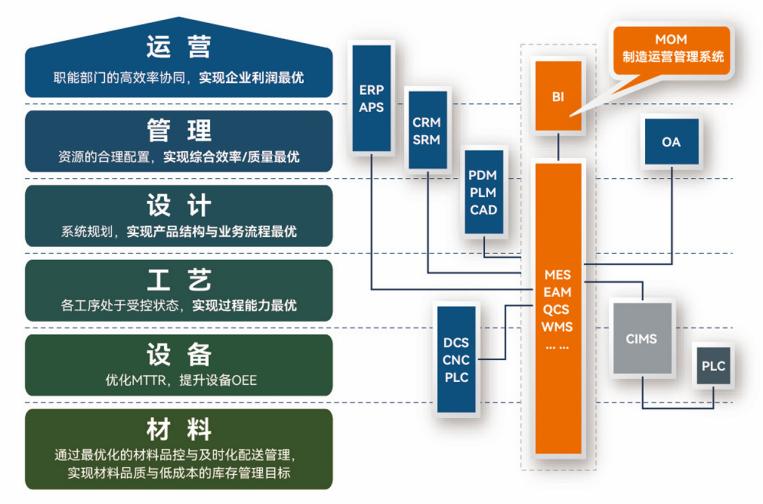
盘古信息PCB行业解决方案:以全域场景重构,激活智造新未来
一、破局:PCB行业的时代之问 在数字经济蓬勃发展的浪潮中,PCB(印制电路板)作为 “电子产品之母”,其重要性愈发凸显。随着 5G、人工智能等新兴技术的加速渗透,PCB行业面临着前所未有的挑战与机遇。产品迭代…...

React Native在HarmonyOS 5.0阅读类应用开发中的实践
一、技术选型背景 随着HarmonyOS 5.0对Web兼容层的增强,React Native作为跨平台框架可通过重新编译ArkTS组件实现85%以上的代码复用率。阅读类应用具有UI复杂度低、数据流清晰的特点。 二、核心实现方案 1. 环境配置 (1)使用React Native…...

oracle与MySQL数据库之间数据同步的技术要点
Oracle与MySQL数据库之间的数据同步是一个涉及多个技术要点的复杂任务。由于Oracle和MySQL的架构差异,它们的数据同步要求既要保持数据的准确性和一致性,又要处理好性能问题。以下是一些主要的技术要点: 数据结构差异 数据类型差异ÿ…...
屋顶变身“发电站” ,中天合创屋面分布式光伏发电项目顺利并网!
5月28日,中天合创屋面分布式光伏发电项目顺利并网发电,该项目位于内蒙古自治区鄂尔多斯市乌审旗,项目利用中天合创聚乙烯、聚丙烯仓库屋面作为场地建设光伏电站,总装机容量为9.96MWp。 项目投运后,每年可节约标煤3670…...

OpenPrompt 和直接对提示词的嵌入向量进行训练有什么区别
OpenPrompt 和直接对提示词的嵌入向量进行训练有什么区别 直接训练提示词嵌入向量的核心区别 您提到的代码: prompt_embedding = initial_embedding.clone().requires_grad_(True) optimizer = torch.optim.Adam([prompt_embedding...

IoT/HCIP实验-3/LiteOS操作系统内核实验(任务、内存、信号量、CMSIS..)
文章目录 概述HelloWorld 工程C/C配置编译器主配置Makefile脚本烧录器主配置运行结果程序调用栈 任务管理实验实验结果osal 系统适配层osal_task_create 其他实验实验源码内存管理实验互斥锁实验信号量实验 CMISIS接口实验还是得JlINKCMSIS 简介LiteOS->CMSIS任务间消息交互…...

鸿蒙DevEco Studio HarmonyOS 5跑酷小游戏实现指南
1. 项目概述 本跑酷小游戏基于鸿蒙HarmonyOS 5开发,使用DevEco Studio作为开发工具,采用Java语言实现,包含角色控制、障碍物生成和分数计算系统。 2. 项目结构 /src/main/java/com/example/runner/├── MainAbilitySlice.java // 主界…...

2023赣州旅游投资集团
单选题 1.“不登高山,不知天之高也;不临深溪,不知地之厚也。”这句话说明_____。 A、人的意识具有创造性 B、人的认识是独立于实践之外的 C、实践在认识过程中具有决定作用 D、人的一切知识都是从直接经验中获得的 参考答案: C 本题解…...
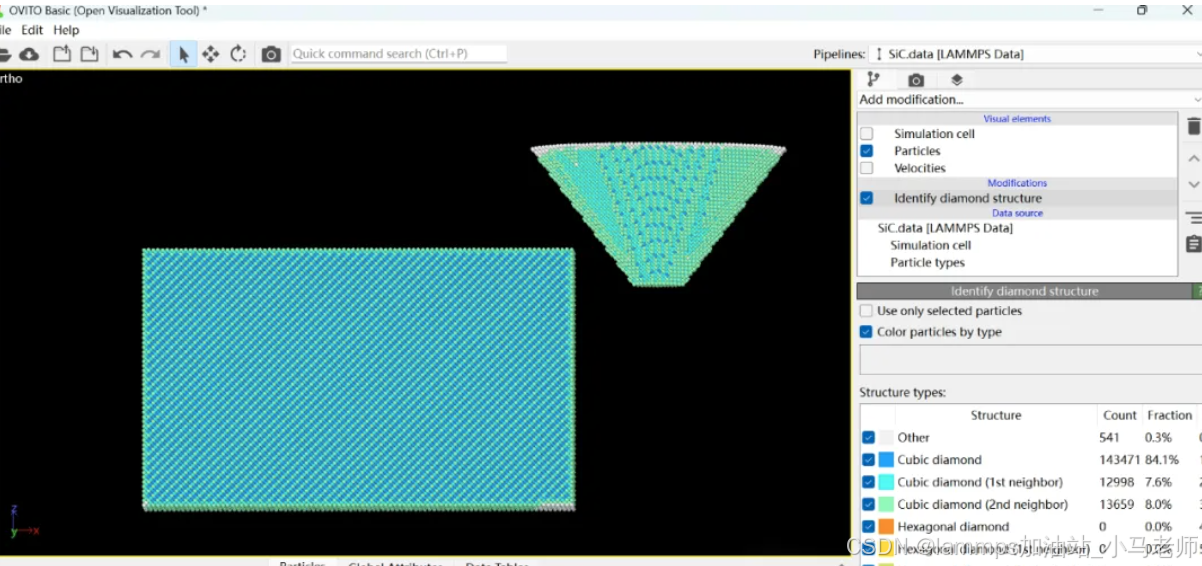
Python Ovito统计金刚石结构数量
大家好,我是小马老师。 本文介绍python ovito方法统计金刚石结构的方法。 Ovito Identify diamond structure命令可以识别和统计金刚石结构,但是无法直接输出结构的变化情况。 本文使用python调用ovito包的方法,可以持续统计各步的金刚石结构,具体代码如下: from ovito…...
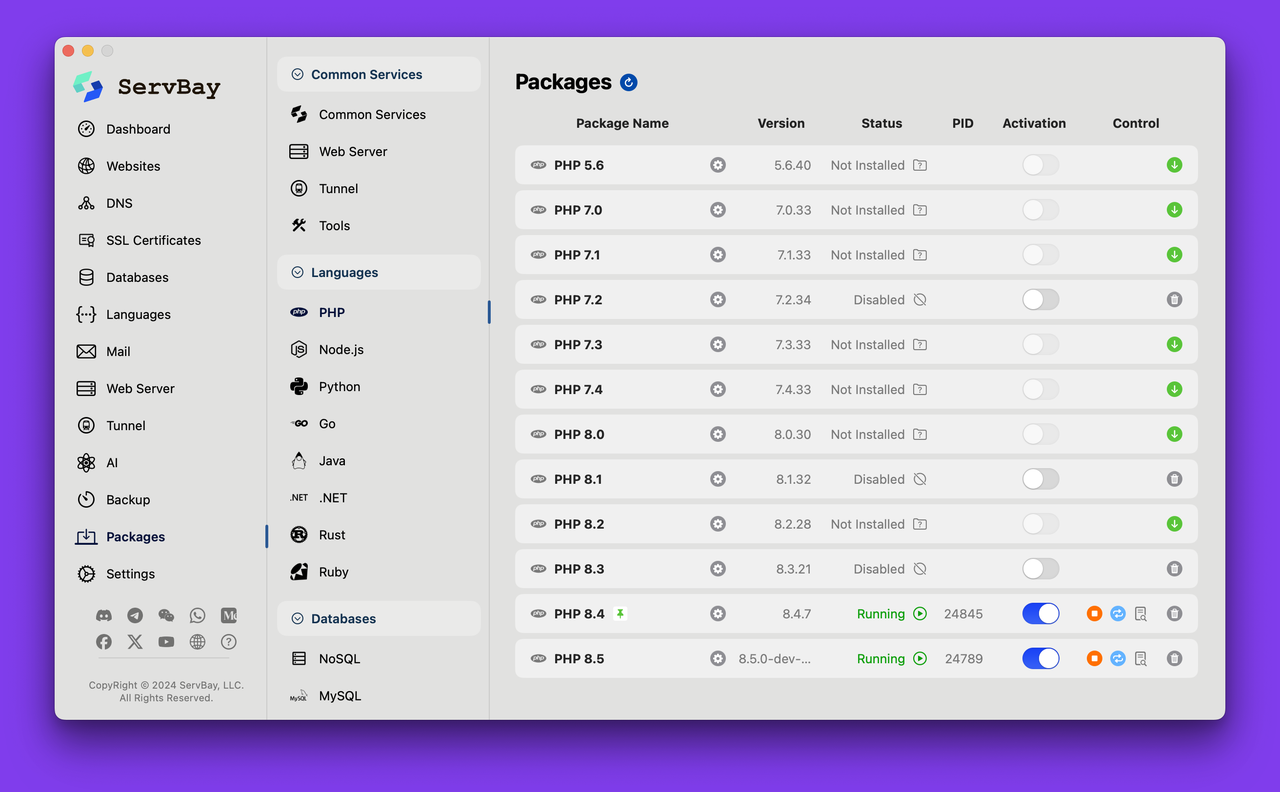
PHP 8.5 即将发布:管道操作符、强力调试
前不久,PHP宣布了即将在 2025 年 11 月 20 日 正式发布的 PHP 8.5!作为 PHP 语言的又一次重要迭代,PHP 8.5 承诺带来一系列旨在提升代码可读性、健壮性以及开发者效率的改进。而更令人兴奋的是,借助强大的本地开发环境 ServBay&am…...