[carla]关于odometry坐标中的角度坐标系 以及 到地图的映射问题
1.获取车辆的Odometry原始信息
在carla中,通过订阅/carla/ego_vecle/odometry 可以查看车辆的全局位置信息,例如:
> header: seq: 118872stamp: secs: 5946nsecs: 5720187frame_id: "map"
child_frame_id: "ego_vehicle"
pose: pose: position: x: 96.5346984863y: -188.643692017z: 0.221679911017orientation: x: 1.09737910971e-07y: 5.40849999846e-07z: 0.0368271997411w: 0.999321648599covariance: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
twist: twist: linear: x: -0.00358968405948y: -3.63046108104e-06z: 2.80475536936e-07angular: x: 2.17012864219e-05y: -0.000262381265741z: -0.00483244467764covariance: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
其中,pose.pose.position.x 和 pose.pose.position.y提供了全局x,y坐标,pose.pose.orientation提供了汽车的旋转角度。
1.1 全局坐标
全局坐标和GNSS传感器获得的经纬度坐标可以相互转换,统一地图内,两种坐标都可以用于车辆定位。
1.2 旋转角度
这里的旋转角度的坐标以N方向为零度,E为90度,W为-90度,S偏E侧为+180度,S偏W侧为-180度,如图所示:
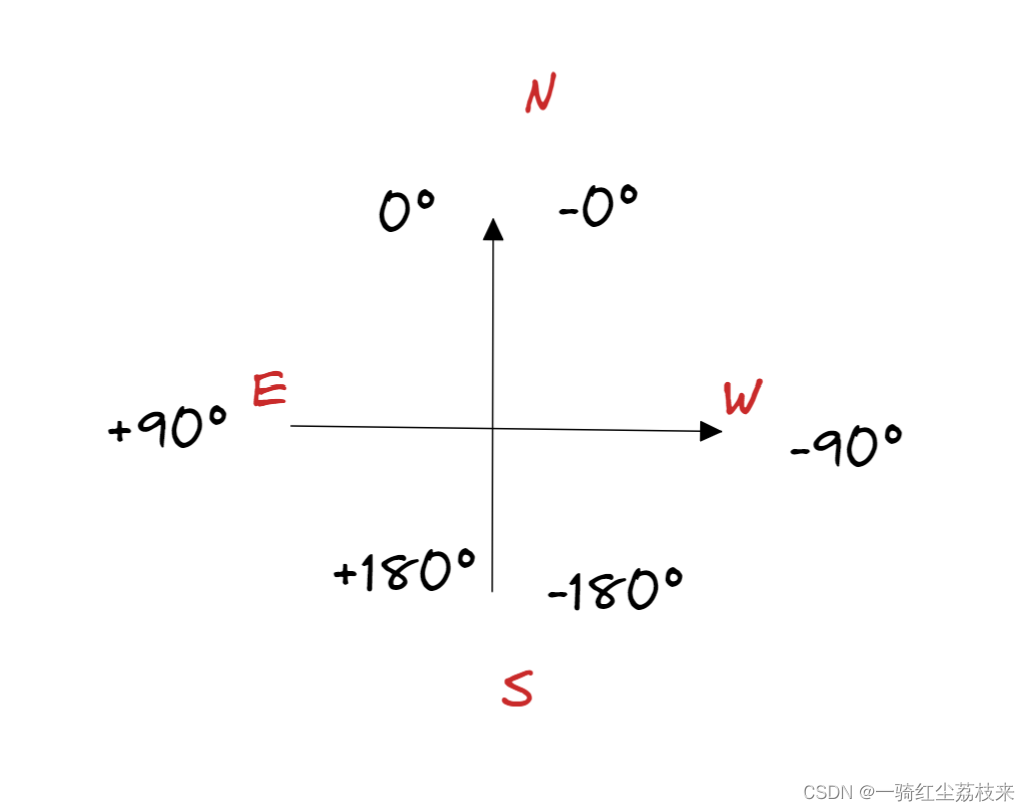
这里值得注意的是:CARLA的odometry坐标系与真实世界的坐标系不同。正常坐标系是上北下南,左西右东,而CARLA里面是上北下南,左东右西。
该角度的具体计算的方法为:
//导入tf/transform_datatypes.h库
#include <tf/transform_datatypes.h>//使用tf::getYaw获取四元数中的偏航角,然后转换成角度
tf::getYaw(carla_odometry.pose.pose.orientation) * 180.0 / M_PI
计算出来与显示界面的Heading是相同的。

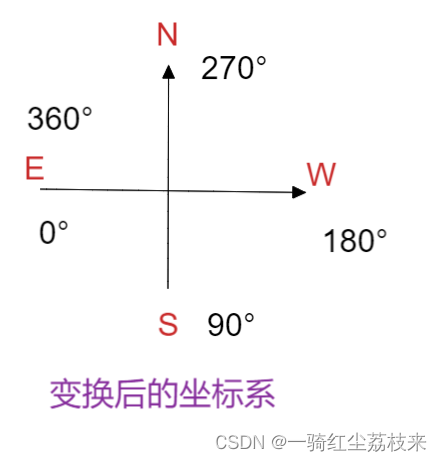
2. 坐标系变换
我们想要把Odometry坐标系变换成下面的角度坐标系:
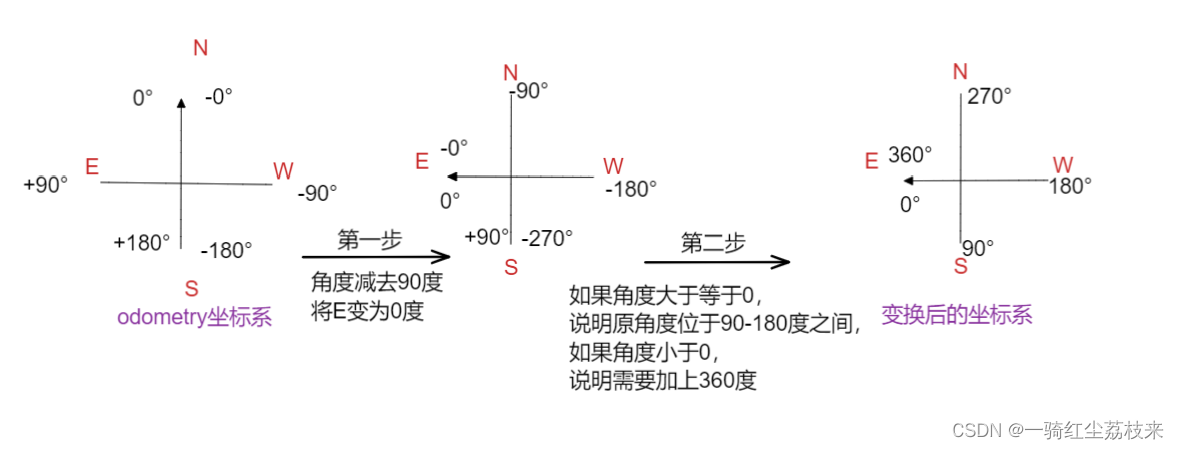
首先,Odometry坐标系需要逆时针旋转90度,那么对应的角度应当减去90度:
θ1=θ0−90°\theta_1=\theta_0 - 90° θ1=θ0−90°
然后,取值范围需要变换到0-360度,对于原角度位于[90°,180°]的,减去90°后已经是变换后的角度,对于[0,90°],[-0,-180°]角度,减去90°后会变成负数,需要增加360°变成正数。
θ2={θ1,θ1>=0θ1+2π,θ1<0\theta_2 = \left\{\begin{matrix} \theta_1, \theta_1 >= 0\\ \theta_1 + 2\pi , \theta_1 <0 \\ \end{matrix}\right. θ2={θ1,θ1>=0θ1+2π,θ1<0
变换过程如图所示:
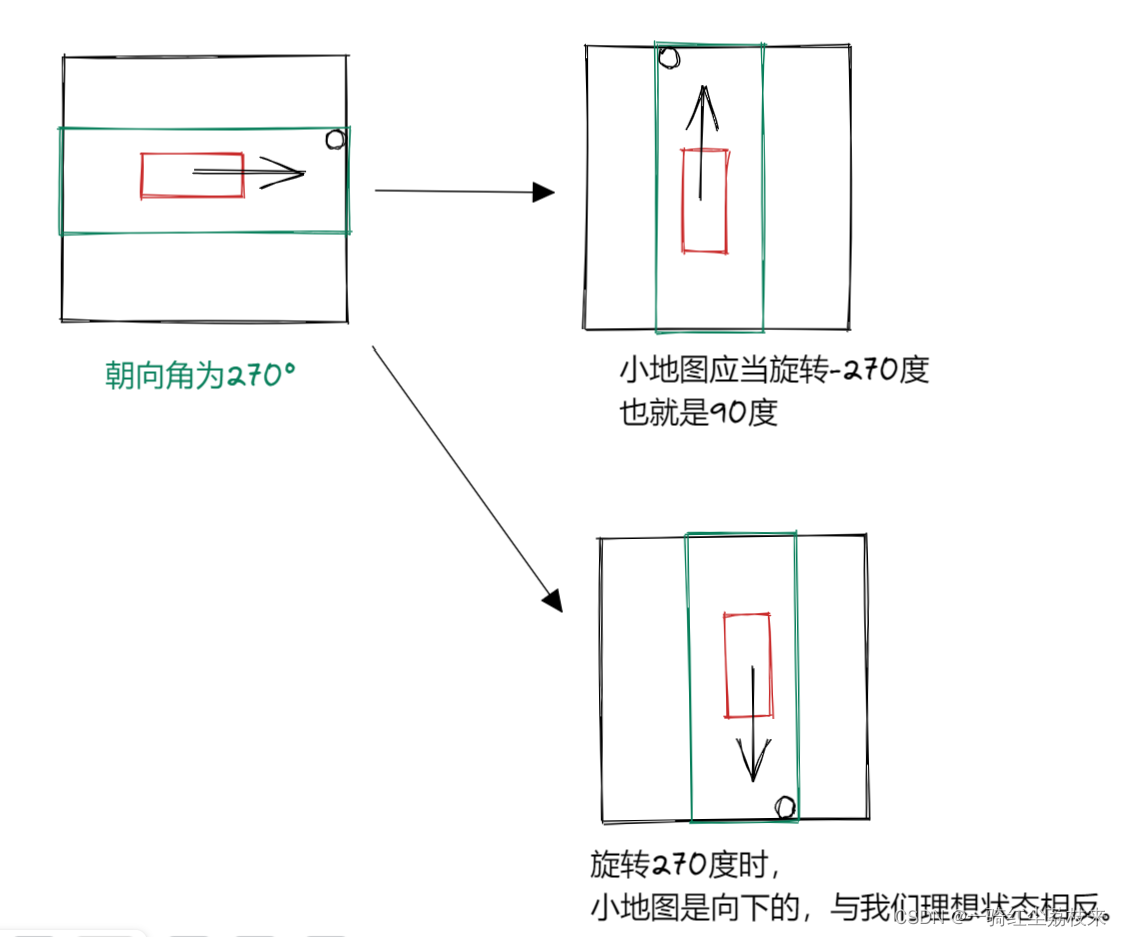
3.关于小地图截取时的注意事项
carla的地图有时候 并不是 上北下南 左西右东的,例如Town02地图
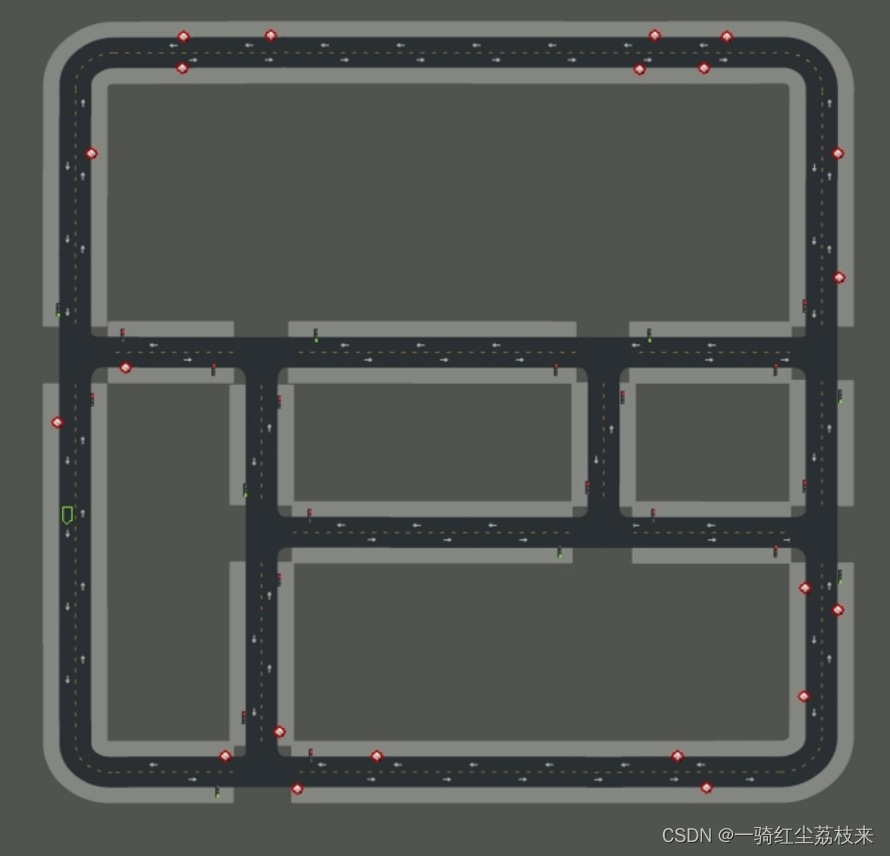
实际上,图片的上方是东,下发是西,左边是南,右边是北。我们想要使得截取的小地图始终朝向车头方向,就要将图片往反方向旋转相同的角度。
相关文章:
[carla]关于odometry坐标中的角度坐标系 以及 到地图的映射问题
1.获取车辆的Odometry原始信息 在carla中,通过订阅/carla/ego_vecle/odometry 可以查看车辆的全局位置信息,例如: > header: seq: 118872stamp: secs: 5946nsecs: 5720187frame_id: "map" child_frame_id: "ego_vehicle" pos…...

Python 正则表达式
正则表达式主要用来查找和匹配字符串的。 一、正在表达式基础 字符 描述 示例 TIY\ 示意特殊序列(也可用于转义特殊字符)如:空白字符 "\s" . 任何字符(换行符除外) "he..o" ^ 起始于 "^h…...

spark03-读取文件数据分区数量个数原理
代码val conf: SparkConf new SparkConf().setMaster("local").setAppName("wordcount")val sc: SparkContext new SparkContext(conf)val rdd: RDD[String] sc.textFile("datas/1.txt",2)rdd.saveAsTextFile("output")数据格式 &a…...
操作系统(day08)内存
存储单元 内存的几个基本概念 存储单元 内存地址从0开始,每个地址对应一个存储单元 存储单元大小根据计算机按照什么方式编址 按字节编址 则每个存储单元大小为一字节,即1B,即8个二进制位按字编址 看这个计算的字长是多少位,如…...
11- 聚类算法 (KMeans/DBSCAN/agg) (机器学习)
聚类算法 聚类算法和降维算法那都属于无监督算法。KMeans 是以一个值为中心, 然后所有其他点到该点距离最小值的累积和。 kmeans KMeans(n_clusters3) # n_clusters 分类数量 kmeans.fit(data.iloc[:,1:]) # 无监督,只需要给数据X就可以 DBSCAN 算法是…...

日日顺供应链|想要看清供应链发展趋势,先回答这三个问题
技术变革如何支撑供应链及管理服务的发展? 数字化与科技化开始承托供应链管理能力的升级与变革? 如何从客户需求的纬度反推供应链及管理服务的模式变革?在过去的三年中,我国的供应链企业经受了最为极端的挑战,但当下&a…...

5守护进程与线程
进程组 多个进程的集合,第一个进程就是组长,组长进程的PID等于进程组ID。 进程组生存期:进程组创建到最后一个进程离开(终止或转移到另一个进程组)。与组长进程是否终止无关。 一个进程可以为自己或子进程设置进程组 ID 相关函数 pid_t …...
EZ-Cube简易款下载器烧写使用方法
一、硬件连接 跟目标芯片接4根线 VCC、GND、TOOL、REST 四根线,如果板子芯片自己外接电源的,VCC 线可以不接。 二、 安装烧写软件和驱动 烧写软件:https://download.csdn.net/download/Stark_/87444744?spm1001.2014.3001.5503 驱动程序&a…...
sql server安装并SSMS连接
博主简介:原互联网大厂tencent员工,网安巨头Venustech员工,阿里云开发社区专家博主,微信公众号java基础笔记优质创作者,csdn优质创作博主,创业者,知识共享者,欢迎关注,点赞ÿ…...
Python_pytorch (二)
python_pytorch 小土堆pytotch学习视频链接 from的是一个个的包(package) import 的是一个个的py文件(file.py) 所使用的一般是文件中的类(.class) 第一步实例化所使用的类,然后调用类中的方法(def) Torchvision 数据集 数据集使用(CI…...
java手机短信验证,并存入redis中,验证码时效5分钟
目录 1、注册发送短信账号一个账号 2、打开虚拟机,将redis服务端打开 3、创建springboot工程,导入相关依赖 4、写yml配置 5、创建controller层,并创建controller类 6、创建service层,并创建service类 7、创建工具类&#x…...
kubectl命令控制远程k8s集群(Windows系统、Ubuntu系统、Centos系统)
文章目录1. 本地是linux2. 本地是Windows1. 本地是linux 安装kubectl命令 法一:从master的/usr/bin目录下拷贝kubectl文件到本机/usr/bin目录下法二:GitHub下载kubectl文件 在家目录下创建.kube目录config文件 法一:将master上对应用户的~/.…...
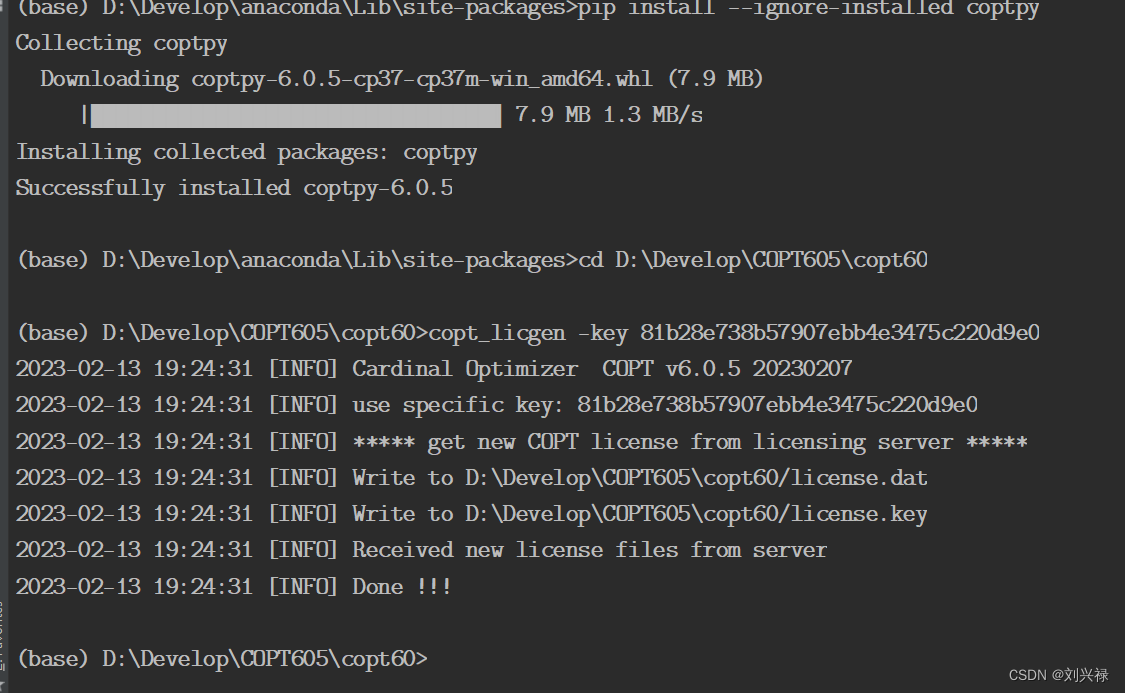
【求解器-COPT】COPT的版本更新中,老版本不能覆盖的问题
【求解器-COPT】COPT的版本更新中,老版本不能覆盖的问题方法1方法2如果license还是找不到作者:刘兴禄 参考网址: COPT的下载和配置步骤如下: 教程 | Windows系统下如何安装COPT求解器并配置许可文件: https://zhuan…...
Vue3.0文档整理:一、简介
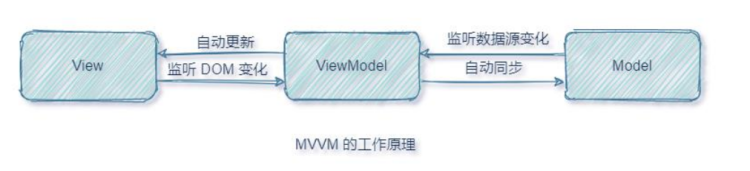
1.1:什么是vue? Vue是一款用于构建用户界面的javascript框架;它基于标准HTML、CSS和Javascript构建,并提供了一套声明式、组件化的编程模型,帮助你高效的开发用户界面。 1.2:MVVM工作原理 MVVM指的是model、view和vie…...
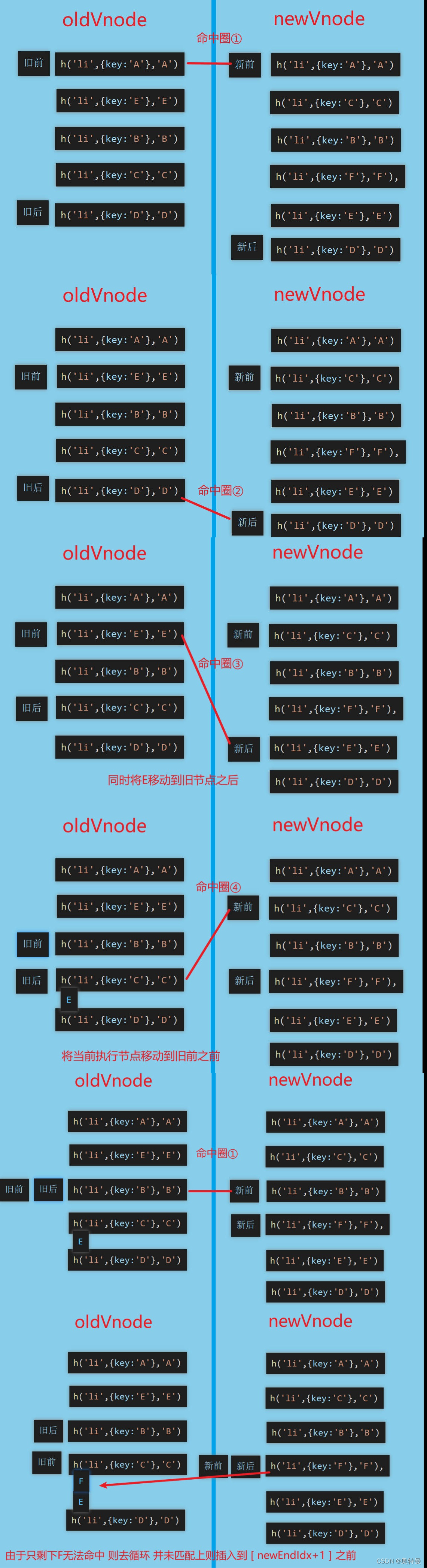
vue2 diff算法及虚拟DOM
概括:diff算法,虚拟DOM中采用的算法,把树形结构按照层级分解,只比较同级元素,不同层级的节点只有创建和删除操作。 一、虚拟DOM (1) 什么是虚拟DOM? 虚拟 DOM (Virtual DOM,简称 VDOM) 是一种…...

Ray和极客们的创新之作,2月18日来发现
所在论坛:数据库技术创新&云原生论坛分享时段:2.18 10:30-11:00分享主题:云原生数据库PieCloudDB :Unbreakable安全特性剖析分享嘉宾:王淏舟,拓数派资深研发工程师 由中国开源软件推进联盟PostgreSQL分…...

Dubbo 源码分析 – 集群容错之 Router
1. 简介 上一篇文章分析了集群容错的第一部分 – 服务目录 Directory。服务目录在刷新 Invoker 列表的过程中,会通过 Router 进行服务路由。上一篇文章关于服务路由相关逻辑没有细致分析,一笔带过了,本篇文章将对此进行详细的分析。首先&…...
行人检测(人体检测)3:Android实现人体检测(含源码,可实时人体检测)
行人检测(人体检测)3:Android实现人体检测(含源码,可实时人体检测) 目录 行人检测(人体检测)3:Android实现人体检测(含源码,可实时人体检测) 1. 前言 2. 人体检测数据集说明 3. 基于YOLOv5的人体检测模型训练 4.人体检测模型…...
【图像分类】基于PyTorch搭建LSTM实现MNIST手写数字体识别(单向LSTM,附完整代码和数据集)
写在前面: 首先感谢兄弟们的关注和订阅,让我有创作的动力,在创作过程我会尽最大能力,保证作品的质量,如果有问题,可以私信我,让我们携手共进,共创辉煌。 提起LSTM大家第一反应是在NLP的数据集上比较常见,不过在图片分类中,它同样也可以使用。我们以比较熟悉的 mnist…...
Kotlin 1.8.0 现已发布,有那些新特性?
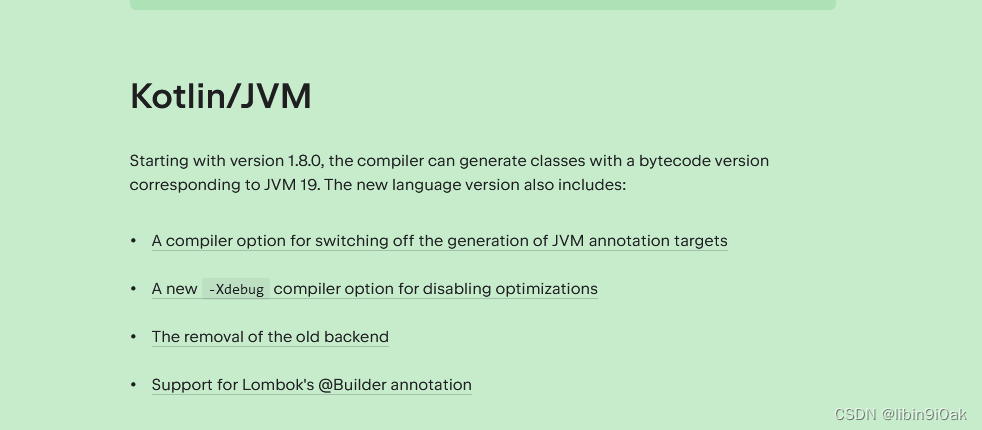
文章目录**如何安装 Kotlin 1.8.0****如果您遇到任何问题****更多文章和视频**结语Kotlin 1.8.0 版本现已发布,以下是其部分最大亮点: JVM 的新实验性功能:递归复制或删除目录内容提升了 kotlin-reflect 性能新的-Xdebug编译器选项ÿ…...

KubeSphere 容器平台高可用:环境搭建与可视化操作指南
Linux_k8s篇 欢迎来到Linux的世界,看笔记好好学多敲多打,每个人都是大神! 题目:KubeSphere 容器平台高可用:环境搭建与可视化操作指南 版本号: 1.0,0 作者: 老王要学习 日期: 2025.06.05 适用环境: Ubuntu22 文档说…...
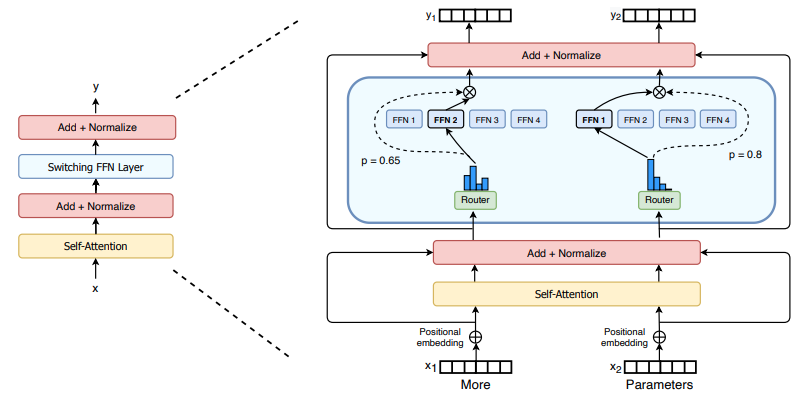
Prompt Tuning、P-Tuning、Prefix Tuning的区别
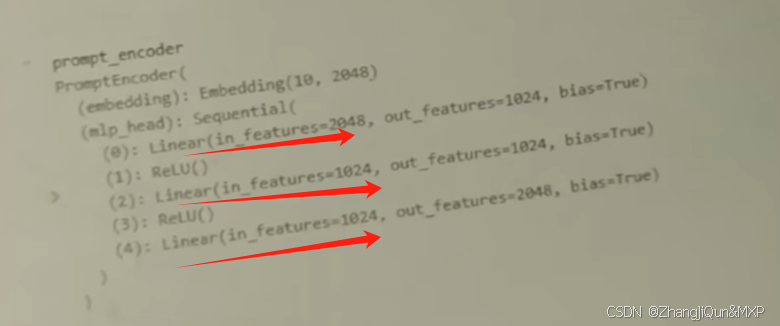
一、Prompt Tuning、P-Tuning、Prefix Tuning的区别 1. Prompt Tuning(提示调优) 核心思想:固定预训练模型参数,仅学习额外的连续提示向量(通常是嵌入层的一部分)。实现方式:在输入文本前添加可训练的连续向量(软提示),模型只更新这些提示参数。优势:参数量少(仅提…...
)
椭圆曲线密码学(ECC)
一、ECC算法概述 椭圆曲线密码学(Elliptic Curve Cryptography)是基于椭圆曲线数学理论的公钥密码系统,由Neal Koblitz和Victor Miller在1985年独立提出。相比RSA,ECC在相同安全强度下密钥更短(256位ECC ≈ 3072位RSA…...
【入坑系列】TiDB 强制索引在不同库下不生效问题
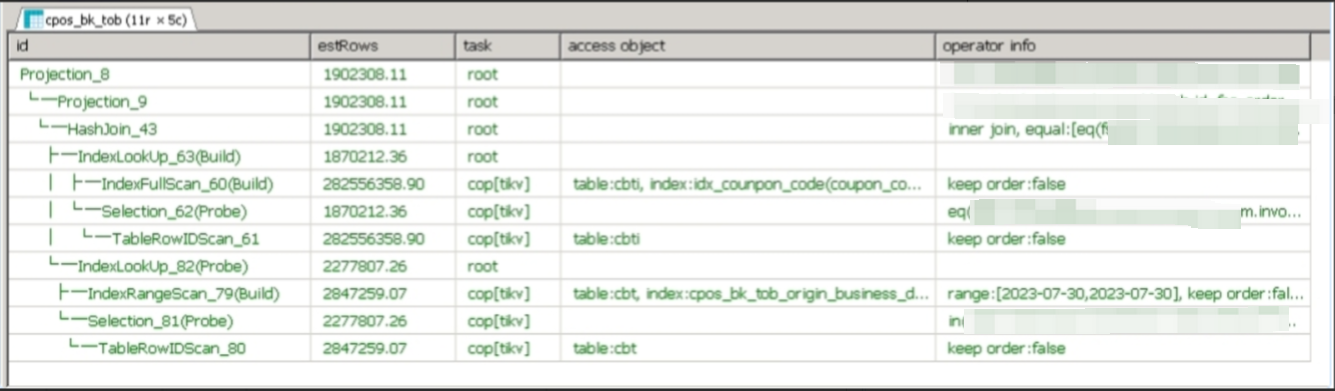
文章目录 背景SQL 优化情况线上SQL运行情况分析怀疑1:执行计划绑定问题?尝试:SHOW WARNINGS 查看警告探索 TiDB 的 USE_INDEX 写法Hint 不生效问题排查解决参考背景 项目中使用 TiDB 数据库,并对 SQL 进行优化了,添加了强制索引。 UAT 环境已经生效,但 PROD 环境强制索…...
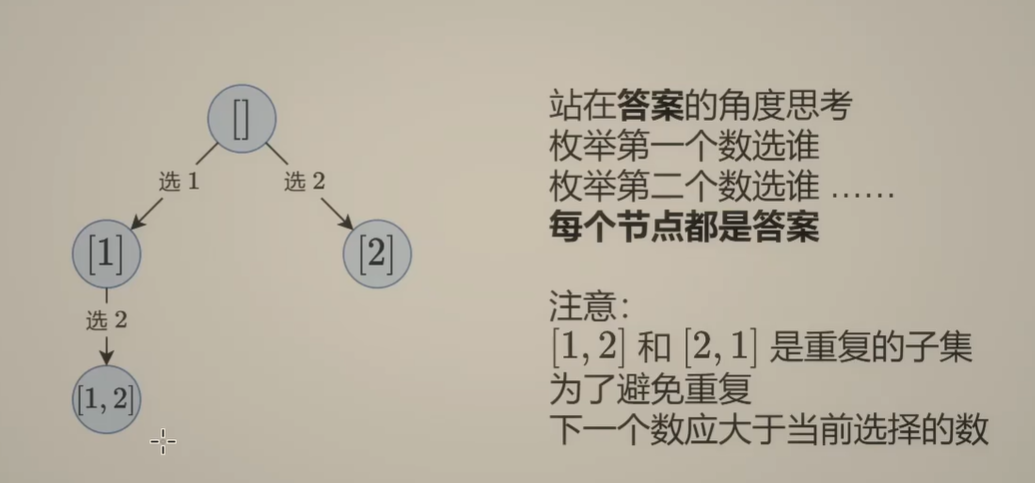
Day131 | 灵神 | 回溯算法 | 子集型 子集
Day131 | 灵神 | 回溯算法 | 子集型 子集 78.子集 78. 子集 - 力扣(LeetCode) 思路: 笔者写过很多次这道题了,不想写题解了,大家看灵神讲解吧 回溯算法套路①子集型回溯【基础算法精讲 14】_哔哩哔哩_bilibili 完…...
(二)TensorRT-LLM | 模型导出(v0.20.0rc3)
0. 概述 上一节 对安装和使用有个基本介绍。根据这个 issue 的描述,后续 TensorRT-LLM 团队可能更专注于更新和维护 pytorch backend。但 tensorrt backend 作为先前一直开发的工作,其中包含了大量可以学习的地方。本文主要看看它导出模型的部分&#x…...
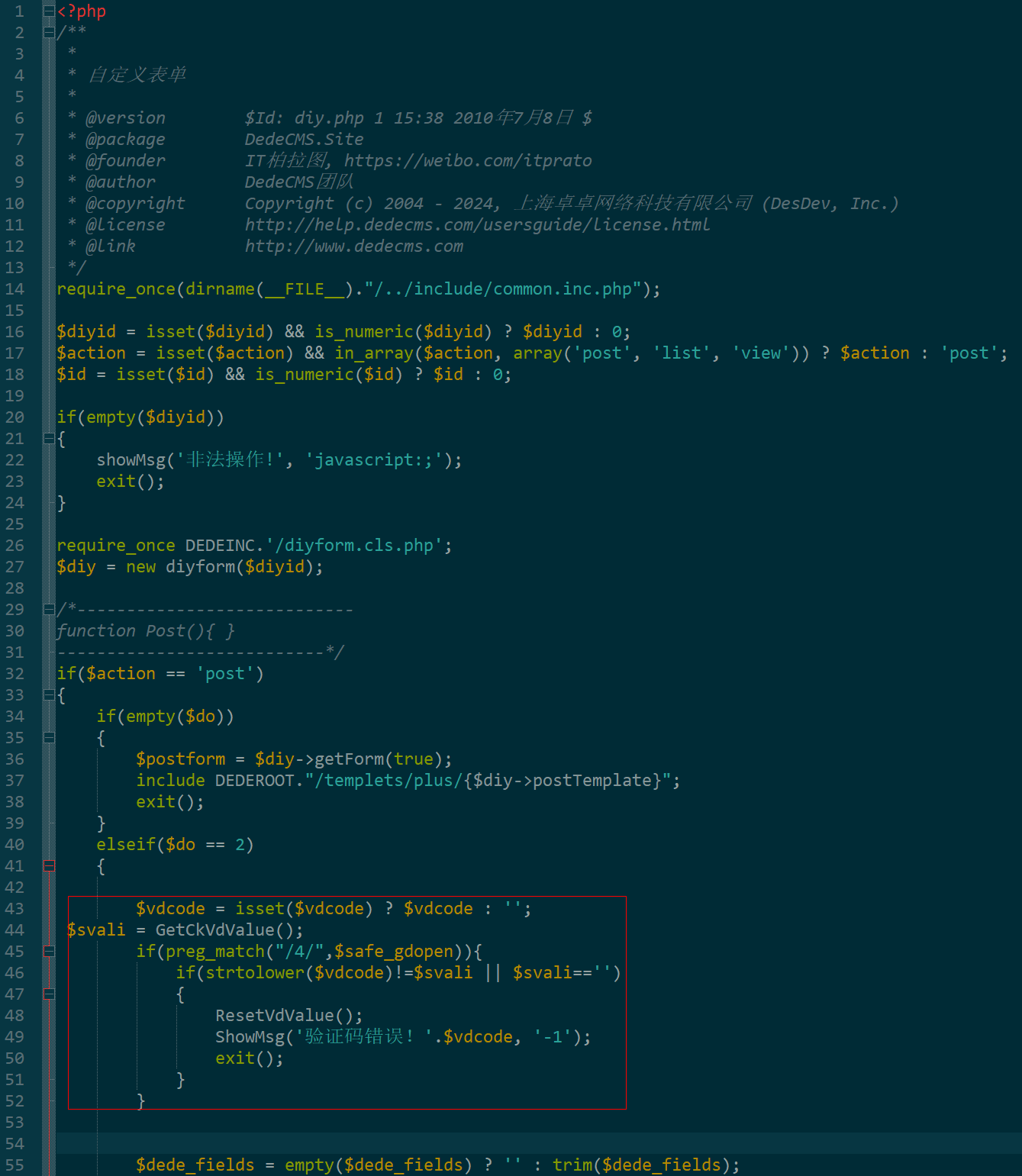
dedecms 织梦自定义表单留言增加ajax验证码功能
增加ajax功能模块,用户不点击提交按钮,只要输入框失去焦点,就会提前提示验证码是否正确。 一,模板上增加验证码 <input name"vdcode"id"vdcode" placeholder"请输入验证码" type"text&quo…...

Python如何给视频添加音频和字幕
在Python中,给视频添加音频和字幕可以使用电影文件处理库MoviePy和字幕处理库Subtitles。下面将详细介绍如何使用这些库来实现视频的音频和字幕添加,包括必要的代码示例和详细解释。 环境准备 在开始之前,需要安装以下Python库:…...
基于Java+VUE+MariaDB实现(Web)仿小米商城
仿小米商城 环境安装 nodejs maven JDK11 运行 mvn clean install -DskipTestscd adminmvn spring-boot:runcd ../webmvn spring-boot:runcd ../xiaomi-store-admin-vuenpm installnpm run servecd ../xiaomi-store-vuenpm installnpm run serve 注意:运行前…...

Bean 作用域有哪些?如何答出技术深度?
导语: Spring 面试绕不开 Bean 的作用域问题,这是面试官考察候选人对 Spring 框架理解深度的常见方式。本文将围绕“Spring 中的 Bean 作用域”展开,结合典型面试题及实战场景,帮你厘清重点,打破模板式回答,…...