ROS核心概念解析:从Node到Master,再到roslaunch的全面指南
Node
在ROS中,最小的进程单元就是节点(node)。一个软件包里可以有多个可执行文件,可执行文件在运行之后就成了一个进程(process),这个进程在ROS中就叫做节点。 从程序角度来说,node就是一个可执行文件(通常为C++编译生成的可执行文件、Python脚本)被执行,加载到了内存之中;从功能角度来说,通常一个node负责者机器人的某一个单独的功能。由于机器人的功能模块非常复杂,我们往往不会把所有功能都集中到一个node上,而会采用分布式的方式,把鸡蛋放到不同的篮子里。
Master
由于机器人的元器件很多,功能庞大,因此实际运行时往往会运行众多的node,负责感知世界、控制运动、决策和计算等功能。那么如何合理的进行调配、管理这些node?这就要利用ROS提供给我们的节点管理器master, master在整个网络通信架构里相当于管理中心,管理着各个node。node首先在master处进行注册,之后master会将该node纳入整个ROS程序中。node之间的通信也是先由master进行“牵线”,才能两两的进行点对点通信。当ROS程序启动时,第一步首先启动master,由节点管理器处理依次启动node。
启动master和node
当我们要启动ROS时,首先输入命令:
$ roscore
此时ROS master启动,同时启动的还有rosout和parameter server,其中rosout是负责日志输出的一个节点,其作用是告知用户当前系统的状态,包括输出系统的error、warning等等,并且将log记录于日志文件中,parameter server即是参数服务器,它并不是一个node,而是存储参数配置的一个服务器。每一次我们运行ROS的节点前,都需要把master启动起来,这样才能够让节点启动和注册。
master之后,节点管理器就开始按照系统的安排协调进行启动具体的节点。节点就是一个进程,只不过在ROS中它被赋予了专用的名字—node。我们知道一个package中存放着可执行文件,可执行文件是静态的,当系统执行这些可执行文件,将这些文件加载到内存中,它就成为了动态的node。
具体启动node的语句是:
$ rosrun pkg_name node_name
通常我们运行ROS,就是按照这样的顺序启动,有时候节点太多,我们会选择用launch文件来启动。 Master、Node之间以及Node之间的关系如下图所示:

rosrun和rosnode命令
rosrun命令的详细用法如下:
$ rosrun [--prefix cmd] [--debug] pkg_name node_name [ARGS]
rosrun将会寻找PACKAGE下的名为EXECUTABLE的可执行程序,将可选参数ARGS传入。
例如在GDB下运行ros程序:
$ rosrun --prefix 'gdb -ex run --args' pkg_name node_name
rosnode命令的详细作用列表如下:

以上命令中常用的为前三个,在开发调试时经常会需要查看当前node以及node信息,所以请记住这些常用命令。如果想不起来,也可以通过rosnode help来查看rosnode命令的用法。
机器人是一个系统工程,通常一个机器人运行操作时要开启多个node,对于一个复杂的机器人的启动操作应该怎么做呢?当然,我们并不需要每个节点依次进行rosrun,ROS为我们提供了一个命令能一次性启动master和多个node。该命令是:
$ roslaunch pkg_name file_name.launch
roslaunch命令首先会自动进行检测系统的roscore有没有运行,也即是确认节点管理器是否在运行状态中,如果master没有启动,那么roslaunch就会首先启动master,然后再按照launch的规则执行。launch文件里已经配置好了启动的规则。 所以roslaunch就像是一个启动工具,能够一次性把多个节点按照我们预先的配置启动起来,减少我们在终端中一条条输入指令的麻烦。
launch文件同样也遵循着xml格式规范,是一种标签文本,它的格式包括以下标签:
<launch> <!--根标签-->
<node> <!--需要启动的node及其参数-->
<include> <!--包含其他launch-->
<machine> <!--指定运行的机器-->
<env-loader> <!--设置环境变量-->
<param> <!--定义参数到参数服务器-->
<rosparam> <!--启动yaml文件参数到参数服务器-->
<arg> <!--定义变量-->
<remap> <!--设定参数映射-->
<group> <!--设定命名空间-->
</launch> <!--根标签-->
launch文件的写法和格式看起来内容比较复杂,我们先来介绍一个最简单的例子如下:
<launch>
<node name="talker" pkg="rospy_tutorials" type="talker" />
</launch>
文本中的信息是,它启动了一个单独的节点talker,该节点是包rospy_tutorials软件包中的节点。
然而实际中的launch文件要复杂很多,我们以Ros-Academy-for-Beginners中的robot_sim_demo为例:
<launch>
<!--arg是launch标签中的变量声明,arg的name为变量名,default或者value为值-->
<arg name="robot" default="xbot2"/>
<arg name="debug" default="false"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/><!-- Start Gazebo with a blank world -->
<include file="$(find gazebo_ros)/launch/empty_world.launch"> <!--include用来嵌套仿真场景的launch文件-->
<arg name="world_name" value="$(find robot_sim_demo)/worlds/ROS-Academy.world"/>
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="false"/>
<arg name="use_sim_time" value="true"/>
<arg name="headless" value="$(arg headless)"/>
</include><!-- Oh, you wanted a robot? --> <!--嵌套了机器人的launch文件-->
<include file="$(find robot_sim_demo)/launch/include/$(arg robot).launch.xml" /><!--如果你想连同RViz一起启动,可以按照以下方式加入RViz这个node-->
<!--node name="rviz" pkg="rviz" type="rviz" args="-d $(find robot_sim_demo)/urdf_gazebo.rviz" /-->
</launch>
这个launch文件相比上一个简单的例子来说,内容稍微有些复杂,它的作用是:启动gazebo模拟器,导入参数内容,加入机器人模型。
对于初学者,我们不要求掌握每一个标签是什么作用,但至少应该有一个印象。如果我们要进行自己写launch文件,可以先从改launch文件的模板入手,基本可以满足普通项目的要求。
相关文章:
ROS核心概念解析:从Node到Master,再到roslaunch的全面指南
Node 在ROS中,最小的进程单元就是节点(node)。一个软件包里可以有多个可执行文件,可执行文件在运行之后就成了一个进程(process),这个进程在ROS中就叫做节点。 从程序角度来说,node就是一个可执行文件&…...

2025广州国际汽车内外饰技术展览会:引领汽车内外饰发展新潮流-Automotive Interiors
随着科技的不断进步和消费者对汽车品质的要求日益提高,汽车内外饰的设计和制造也在不断创新和发展。AUTO TECH China 2025广州国际汽车内外饰技术展览会作为行业内的重要盛会,将于2025年11月20日至22日在广州保利世贸博览馆盛大举办。本次展览会将汇集全…...

ElasticSearch内存占用率过高怎么办?
文章目录 1,先用top看看各个进程的内存占用情况2,不能简单的杀死进程,然后再重启。3,查看一下ElasticSearch进程的具体启动情况4,修改Elasticsearch 的Java堆内存 1,先用top看看各个进程的内存占用情况 先…...

基于Qt的OFD阅读器开发原理与实践
摘要 本文详细探讨了基于Qt开发OFD阅读器的原理与实践。通过解析OFD文件格式、构建文档结构、实现页面渲染、处理用户交互以及进行性能优化,本文展示了如何使用Qt框架开发一个功能强大、性能优异的OFD阅读器。文章还提供了示例代码和未来发展方向,为开发…...

用 HTML5 Canvas 和 JavaScript 实现流星雨特效
最近在研究前端动画效果时,实现了一个超酷的流星雨特效,今天来和大家分享下具体实现过程。 1,整体实现思路 这个流星雨特效主要由 HTML、CSS 和 JavaScript 协同完成。HTML 搭建基础结构,CSS 负责页面样式设计,JavaScript 实现星星和流星的动态效果。 效果展示: 用 HTM…...

Apifox=Postman+Swagger+Jmeter+Mock
A. 开发人员接口管理使用(Swagger 工具管理接口) B. 后端开发人员通过Postman 工具,一边开发一边测试 C. 前端开发人员需要Mock 工具提供前端调用 D. 测试人员通过(Postman、Jmeter)等工具进行接口测试 为了后台开发、前端开发、测试工程师等不同角色更加便捷管理…...

SpringBoot多数据源架构实现
文章目录 1. 环境准备2. 创建Spring Boot项目3. 添加依赖4. 配置多数据源5. 配置MyBatis-Plus6. 使用多数据源7. 创建Mapper接口8. 实体类定义9. 测试多数据源10. 注意事项10.1 事务导致多数据源失效问题解决方案: 10.2 ClickHouse的事务支持10.3 数据源切换的性能开…...

HarmonyOS开发:传参方式
一、父子组件传参 1、父传子(Prop方式) 父组件代码 Entry Component struct ParentComponent {State parentMessage: string Hello from Parent;build() {Column() {ChildComponent({ message: this.parentMessage });}} } 子组件代码 Component s…...

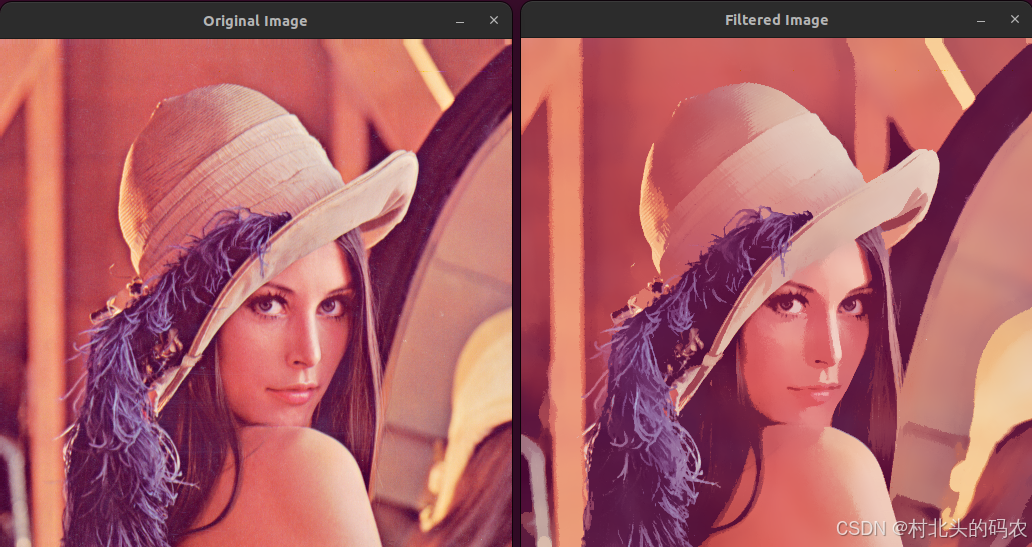
OpenCV计算机视觉 07 图像的模块匹配
在做目标检测、图像识别时,我们经常用到模板匹配,以确定模板在输入图像中的可能位置 API函数 cv2.matchTemplate(image, templ, method, resultNone, maskNone) 参数含义: image:待搜索图像 templ:模板图像 method&…...

国产游戏崛起,燕云十六移动端1.9上线,ToDesk云电脑先开玩
游戏爱好者的利好消息出新了!网易大型武侠仙游《燕云十六声》正式官宣,移动端要在1月9日正式上线了!你期待手游版的燕云吗?不妨评论区留言说说你的看法。小编分别花了几个小时在台式机电脑和手机上都试了下,欣赏画面还…...

企业级PHP异步RabbitMQ协程版客户端 2.0 正式发布
概述 workerman/rabbitmq 是一个异步RabbitMQ客户端,使用AMQP协议。 RabbitMQ是一个基于AMQP(高级消息队列协议)实现的开源消息组件,它主要用于在分布式系统中存储和转发消息。RabbitMQ由高性能、高可用以及高扩展性出名的Erlan…...

[OPEN SQL] 限定选择行数
本次操作使用的数据库表为SCUSTOM,其字段内容如下所示 航班用户(SCUSTOM) 该数据库表中的部分值如下所示 指定查询多少行数据,我们可以使用语法UP TO n ROWS来实现对数据前n项的查询 语法格式 SELECT * FROM <dbtab> UP TO n ROWS 参数说明 db…...

Vite源码学习分享(一)
!](https://i-blog.csdnimg.cn/direct/971c35b61c57402b95be91d2b4965d85.png) 同一个项目 vite VS webpack启动速度对比...

定位,用最通俗易懂的方法2:TDOA与对应的CRLB
二郎就不设置什么VIP可见啥的了,这样大家都能看到。 如果觉得受益,可以给予一些打赏,也算对原创的一些鼓励,谢谢。 钱的用途:1)布施给他人;2)二郎会有更多空闲时间写教程 起因&…...

Linux第一课:c语言 学习记录day06
四、数组 冒泡排序 两两比较,第 j 个和 j1 个比较 int a[5] {5, 4, 3, 2, 1}; 第一轮:i 0 n:n个数,比较 n-1-i 次 4 5 3 2 1 // 第一次比较 j 0 4 3 5 2 1 // 第二次比较 j 1 4 3 2 5 1 // 第三次比较 j 2 4 3 2 1 5 // …...

ExplaineR:集成K-means聚类算法的SHAP可解释性分析 | 可视化混淆矩阵、决策曲线、模型评估与各类SHAP图
集成K-means聚类算法的SHAP可解释性分析 加载数据集并训练机器学习模型 SHAP 分析以提取特征对预测的影响 通过混淆矩阵可视化模型性能 决策曲线分析 模型评估(多指标和ROC曲线的目视检查) 带注释阈值的 ROC 曲线 加载 SHAP 结果以进行下游分析 与…...

2025年第三届“华数杯”国际大学生数学建模竞赛A题题目
问题A:他能游得更快吗? 背景介绍 在2024年巴黎奥运会上,中国游泳运动员潘展乐凭借出色的表现成为全球瞩目的焦点。年仅19岁的他在男子100米自由泳比赛中以46秒40 的成绩夺冠,并创造了自己保持的世界纪录。在男子4100米混合泳接力…...
)
用c实现C++类(八股)
在 C 语言中,虽然没有内建的面向对象编程(OOP)特性(如封装、继承、多态),但通过一些编程技巧,我们仍然可以模拟实现这些概念。下面将用通俗易懂的方式,逐步介绍如何在 C 中实现封装、…...

【C++多线程编程:六种锁】
目录 普通互斥锁: 轻量级锁 独占锁: std::lock_guard: std::unique_lock: 共享锁: 超时的互斥锁 递归锁 普通互斥锁: std::mutex确保任意时刻只有一个线程可以访问共享资源,在多线程中常用于保…...

【Javascript Day5】for循环及典型案例
for 循环 // 语法: for( 开始 ; 结束 ; 步长 ){ 循环体 } // for( var i 循环初始值 ; i的循环范围 ; i的增加或减少规则 ){ 循环体 } // 死循环 // for(;;){ // console.log("for循环"); // } // 循环打…...
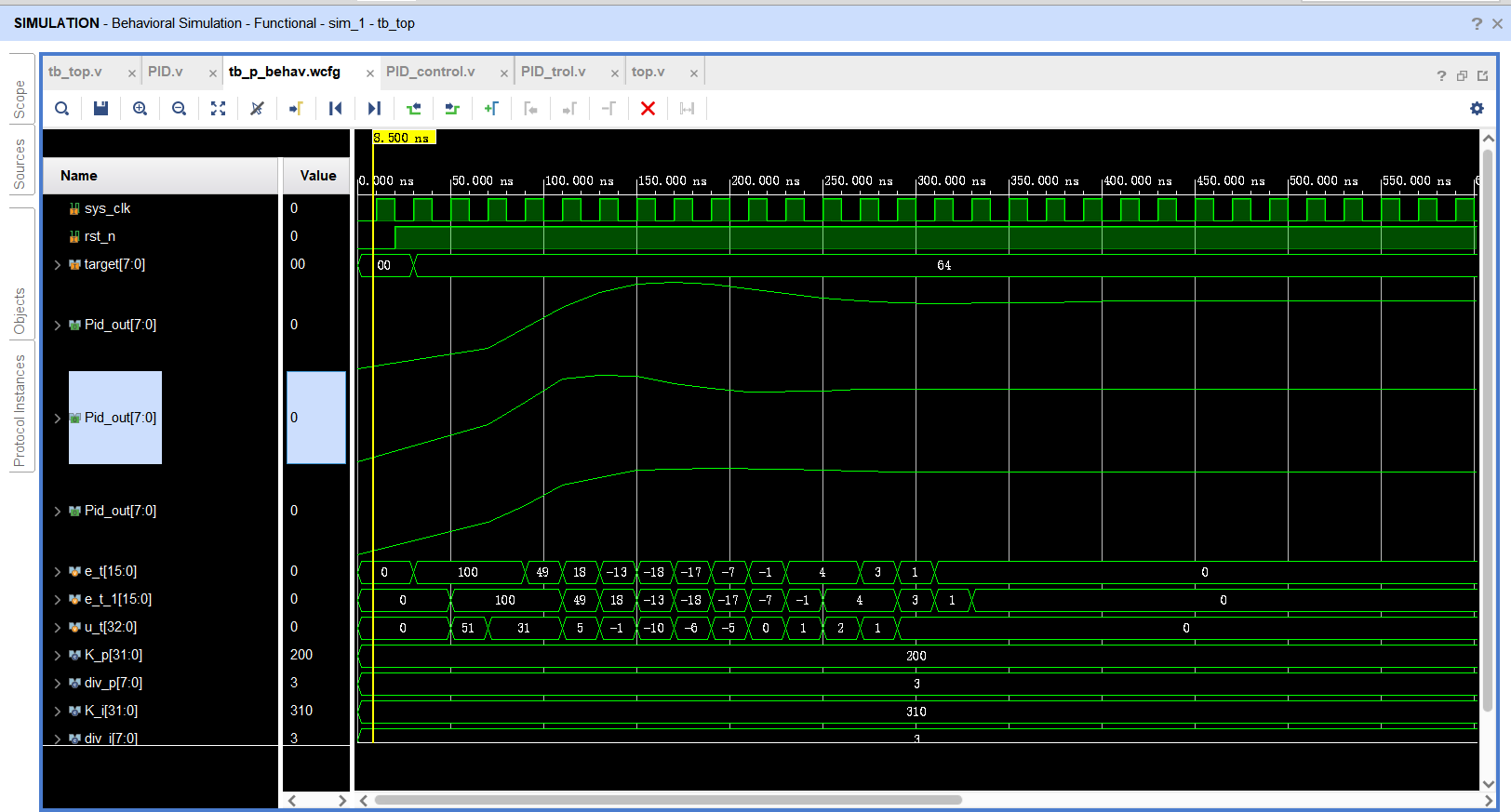
基于FPGA的PID算法学习———实现PID比例控制算法
基于FPGA的PID算法学习 前言一、PID算法分析二、PID仿真分析1. PID代码2.PI代码3.P代码4.顶层5.测试文件6.仿真波形 总结 前言 学习内容:参考网站: PID算法控制 PID即:Proportional(比例)、Integral(积分&…...

【决胜公务员考试】求职OMG——见面课测验1
2025最新版!!!6.8截至答题,大家注意呀! 博主码字不易点个关注吧,祝期末顺利~~ 1.单选题(2分) 下列说法错误的是:( B ) A.选调生属于公务员系统 B.公务员属于事业编 C.选调生有基层锻炼的要求 D…...

04-初识css
一、css样式引入 1.1.内部样式 <div style"width: 100px;"></div>1.2.外部样式 1.2.1.外部样式1 <style>.aa {width: 100px;} </style> <div class"aa"></div>1.2.2.外部样式2 <!-- rel内表面引入的是style样…...
)
【服务器压力测试】本地PC电脑作为服务器运行时出现卡顿和资源紧张(Windows/Linux)
要让本地PC电脑作为服务器运行时出现卡顿和资源紧张的情况,可以通过以下几种方式模拟或触发: 1. 增加CPU负载 运行大量计算密集型任务,例如: 使用多线程循环执行复杂计算(如数学运算、加密解密等)。运行图…...
SpringCloudGateway 自定义局部过滤器
场景: 将所有请求转化为同一路径请求(方便穿网配置)在请求头内标识原来路径,然后在将请求分发给不同服务 AllToOneGatewayFilterFactory import lombok.Getter; import lombok.Setter; import lombok.extern.slf4j.Slf4j; impor…...
OPenCV CUDA模块图像处理-----对图像执行 均值漂移滤波(Mean Shift Filtering)函数meanShiftFiltering()
操作系统:ubuntu22.04 OpenCV版本:OpenCV4.9 IDE:Visual Studio Code 编程语言:C11 算法描述 在 GPU 上对图像执行 均值漂移滤波(Mean Shift Filtering),用于图像分割或平滑处理。 该函数将输入图像中的…...
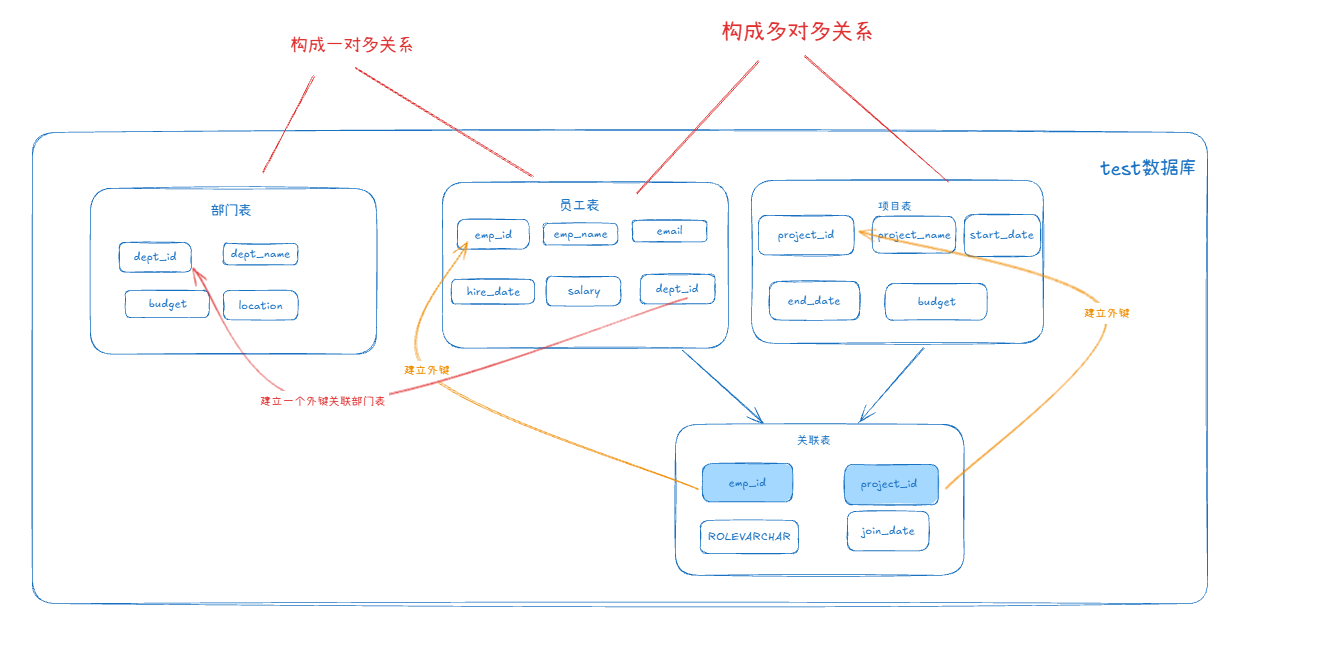
MySQL 知识小结(一)
一、my.cnf配置详解 我们知道安装MySQL有两种方式来安装咱们的MySQL数据库,分别是二进制安装编译数据库或者使用三方yum来进行安装,第三方yum的安装相对于二进制压缩包的安装更快捷,但是文件存放起来数据比较冗余,用二进制能够更好管理咱们M…...
提供了哪些便利?)
现有的 Redis 分布式锁库(如 Redisson)提供了哪些便利?
现有的 Redis 分布式锁库(如 Redisson)相比于开发者自己基于 Redis 命令(如 SETNX, EXPIRE, DEL)手动实现分布式锁,提供了巨大的便利性和健壮性。主要体现在以下几个方面: 原子性保证 (Atomicity)ÿ…...
群晖NAS如何在虚拟机创建飞牛NAS
套件中心下载安装Virtual Machine Manager 创建虚拟机 配置虚拟机 飞牛官网下载 https://iso.liveupdate.fnnas.com/x86_64/trim/fnos-0.9.2-863.iso 群晖NAS如何在虚拟机创建飞牛NAS - 个人信息分享...
ubuntu22.04有线网络无法连接,图标也没了
今天突然无法有线网络无法连接任何设备,并且图标都没了 错误案例 往上一顿搜索,试了很多博客都不行,比如 Ubuntu22.04右上角网络图标消失 最后解决的办法 下载网卡驱动,重新安装 操作步骤 查看自己网卡的型号 lspci | gre…...