PID控制算法基础介绍
PID控制的概念
生活中的一些小电器,比如恒温热水器、平衡车,无人机的飞行姿态和飞行速度控制,自动驾驶等等,都有应用到 PID——PID 控制在自动控制原理中是一套比较经典的算法。
为什么需要 PID 控制器呢?
你一定用过恒温热水壶,想让热水壶的水保持在一个恒定的温度,这时候就需要一种算法先将水温加热到目标位置附近,能够“预见”这个水温的变化趋势自动控制加热功率,然后还能根据各种环境影响因素去调节以维持设定目标。
PID算法:就是“比例(proportional)、积分(integral)、微分(derivative)”,是一种常见的“保持稳定”控制算法。
常见的PID控制系统框图:
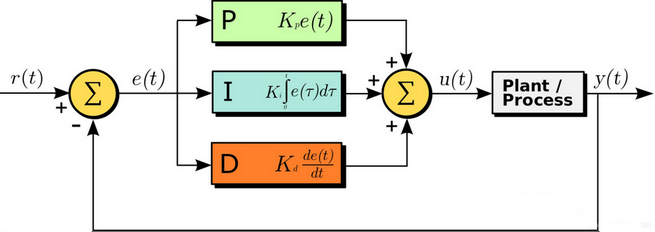
框图可以看出e(t)和u(t)的关系式:

其中:
Kp:比例增益;
Ki:积分增益;
Kd:微分增益;
e:误差=设定值 - 回授值;
t:时间。
简单讲,根据给定值和实际输出值构成控制偏差,将偏差按比例、积分和微分通过线性组合构成控制量,对被控对象进行控制。
公式
PID原始公式:

把Kp乘进去得:

令

即可得到简化公式:

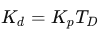
对于这个式子,其实涵盖了三种控制算法,每一种都可以单独拿出来。
PID算法其实就是三个算法的组合,而且,在数学上面就是简单的代数和!
原理
1.比例控制算法
我们先说PID中最简单的比例控制,抛开其他两个不谈。假设我有一个水缸,最终的控制目的是要保证水缸里的水位永远的维持在1米的高度。假设初始时刻,水缸里的水位是0.2米,那么当前时刻的水位和目标水位之间是存在一个误差的error,且error为0.8。假设一个人通过往缸里加水的方式来控制水位。如果单纯的用比例控制算法,就是指加入的水量u和误差error是成正比的。即
u=kp*error
假设kp取0.5,
那么t=1时(表示第1次加水),u=0.5*0.8=0.4,所以这一次加入的水量会使水位在0.2的基础上上升0.4,达到0.6。
接着,t=2时刻(第2次加水),当前水位是0.6,所以error是0.4。u=0.5*0.4=0.2,会使水位再次上升0.2,达到0.8。
如此这么循环下去,就是比例控制算法的运行方法。
可以预见,最终水位会无限接近我们需要的1米。
但是,单单的比例控制存在着一些不足,其中一点就是:稳态误差。
像上述的例子,根据kp取值不同,系统最后都会达到1米,只不过kp大了到达的快,kp小了到达的慢一些。不会有稳态误差。但是,考虑另外一种情况,假设这个水缸在加水的过程中,存在漏水的情况,假设每次加水的过程,都会漏掉0.1米高度的水。仍然假设kp取0.5,那么会存在着某种情况,假设经过几次加水,水缸中的水位到0.8时,水位将不会再变换!!!因为,水位为0.8,则误差error=0.2。所以每次往水缸中加水的量为u=0.5*0.2=0.1。同时,每次加水,缸里又会流出去0.1米的水!!!加入的水和流出的水相抵消,水位将不再变化!!
也就是说,我的目标是1米,但是最后系统达到0.8米的水位就不再变化了,且系统已经达到稳定。由此产生的误差就是稳态误差了。
(在实际情况中,这种类似水缸漏水的情况往往更加常见,比如控制汽车运动,摩擦阻力就相当于是“漏水”,控制机械臂、无人机的飞行,各类阻力和消耗都可以理解为本例中的“漏水”)
所以,单独的比例控制,在很多时候并不能满足要求。
2.积分控制算法
接着说上面的例子,如果仅仅用比例,可以发现存在暂态误差,最后的水位就卡在0.8了。于是,在控制中,我们再引入一个分量,该分量和误差的积分是正比关系。所以,比例+积分控制算法为:
u=kp*error+ ki∗∫ error
还是用上面的例子来说明,第一次的误差error是0.8,第二次的误差是0.4,第三次的误差是0.2,至此,误差的积分(离散情况下积分其实就是做累加),∫error=0.8+0.4+0.2=1.4。先假设它积分系数为0.1,已知比例控制算法的输入和漏掉的相等,那么这时整个算法只需要看积分控制算法的输出就行了,故积分控制输出1.4*0.1=0.14,很显然,积分控制的加入打破了之前的稳定状态,之前会卡在0.8,现在至少会是0.8+0.14。(计算很随意,不要较真)这个时候的控制量,除了比例的那一部分,还有一部分就是一个系数ki乘以这个积分项。由于这个积分项会将前面若干次的误差进行累计,所以可以很好的消除稳态误差(假设在仅有比例项的情况下,系统卡在稳态误差了,即上例中的0.8,由于加入了积分项的存在,会让输入增大,从而使得水缸的水位可以大于0.8,渐渐到达目标的1.0。)这就是积分项的作用。另一方面积分项也加快了整体控制算法的响应速度。
(稳态误差又叫静差:被控量的稳定值和给定值之差,一般用于衡量系统的准确性)静差很难被消除,但是通过积分控制可以尽量去减小,而且积分系数不可太大,太大静差反而更大。
3.微分控制算法
换一个另外的例子,平稳的驾驶车辆,当发现前面有红灯时,为了使得行车平稳,基本上提前几十米就放松油门并踩刹车了。当车辆离停车线非常近的时候,则使劲踩刹车,使车辆停下来。整个过程可以看做一个加入微分的控制策略。
微分,说白了在离散情况下,就是error的差值,就是t时刻和t-1时刻error的差,即u=kd *(error(t)-error(t-1)),其中的kd是一个系数项。可以看到,在刹车过程中,因为error是越来越小的,所以这个微分控制项一定是负数,在控制中加入一个负数项,他存在的作用就是为了防止汽车由于刹车不及时而闯过了线。从常识上可以理解,越是靠近停车线,越是应该注意踩刹车,不能让车过线,所以这个微分项的作用,就可以理解为刹车,当车离停车线很近并且车速还很快时,这个微分项的绝对值(实际上是一个负数)就会很大,从而表示应该用力踩刹车才能让车停下来。
换到上面给水缸加水的例子,就是当发现水缸里的水快要接近1的时候,加入微分项,可以防止给水缸里的水加到超过1米的高度,说白了就是减少控制过程中的震荡。
从公式上看,微分控制算法如下:

离散情况下,微分就是error的差值,就是当前时刻和上一时刻error的差,error指的是目标值和当前值的差值

①当 当前值<目标值 时:一般在该调节过程中,误差是越来越小的(正实数运算),这也就可以得

对于主要的比例控制而言,此时e(t)>0,二者符号相反,换言之,这里微分控制起到了削减比例控制力度的作用

②当 当前值>目标值 时: 输出过大,需要减小,对于比例控制,e(t)<0,反观微分控制:
符号还是和比例控制相反

最终结论就是微分起到阻尼作用,减小震荡,提高稳定,减小变化趋势,但是也会降低响应速度。
通过下面的动图再直观看一下PID三个控制参数的影响:

从上面的动图可以看出:
1、Kp越大,越能快速接近目标值1.0
2、只调整Kp可能会存在稳定误差
3、加入Ki可以减小稳定误差,但同时也使得系统震荡加剧
4、加入Ki加快了整体的响应速度
5、加入Kd可以减小震荡,但也降低了响应速度(可以通过观察图像什么时间t首次碰到目标1.0)
参考及扩展推荐:
https://blog.csdn.net/m0_38106923/article/details/109545445
https://zhuanlan.zhihu.com/p/32264695
https://www.zhihu.com/question/402289932
https://zhuanlan.zhihu.com/p/39573490
https://blog.csdn.net/kevinshift/article/details/124753170
https://www.woshipm.com/pd/4206858.html
相关文章:
PID控制算法基础介绍
PID控制的概念 生活中的一些小电器,比如恒温热水器、平衡车,无人机的飞行姿态和飞行速度控制,自动驾驶等等,都有应用到 PID——PID 控制在自动控制原理中是一套比较经典的算法。 为什么需要 PID 控制器呢? 你一定用…...

Ajax 学习笔记
一、Ajax1.1 什么是AjaxAJAX Asynchronous JavaScript and XML(异步的JavaScript和XML)。Ajax是一种在无需加载整个网页的情况下,能够更新部分网页的技术,它不是一种新的编程语言,而是一种用于创建更好更快以及交互性更强的Web应用程序的技术…...

力扣解法汇总1234. 替换子串得到平衡字符串
目录链接: 力扣编程题-解法汇总_分享记录-CSDN博客 GitHub同步刷题项目: https://github.com/September26/java-algorithms 原题链接:力扣 描述: 有一个只含有 Q, W, E, R 四种字符,且长度为 n 的字符串。 假如在该…...

C++关键字之const、inline、static
C 关键字总结 1.const const是 constant 的缩写,本意是不变的、不易改变的意思。在C中用来修饰内置类型变量,自定义对象,成员函数,返回值,函数参数使用如下: //修饰普通类型变量 const int a 7; int ba;…...
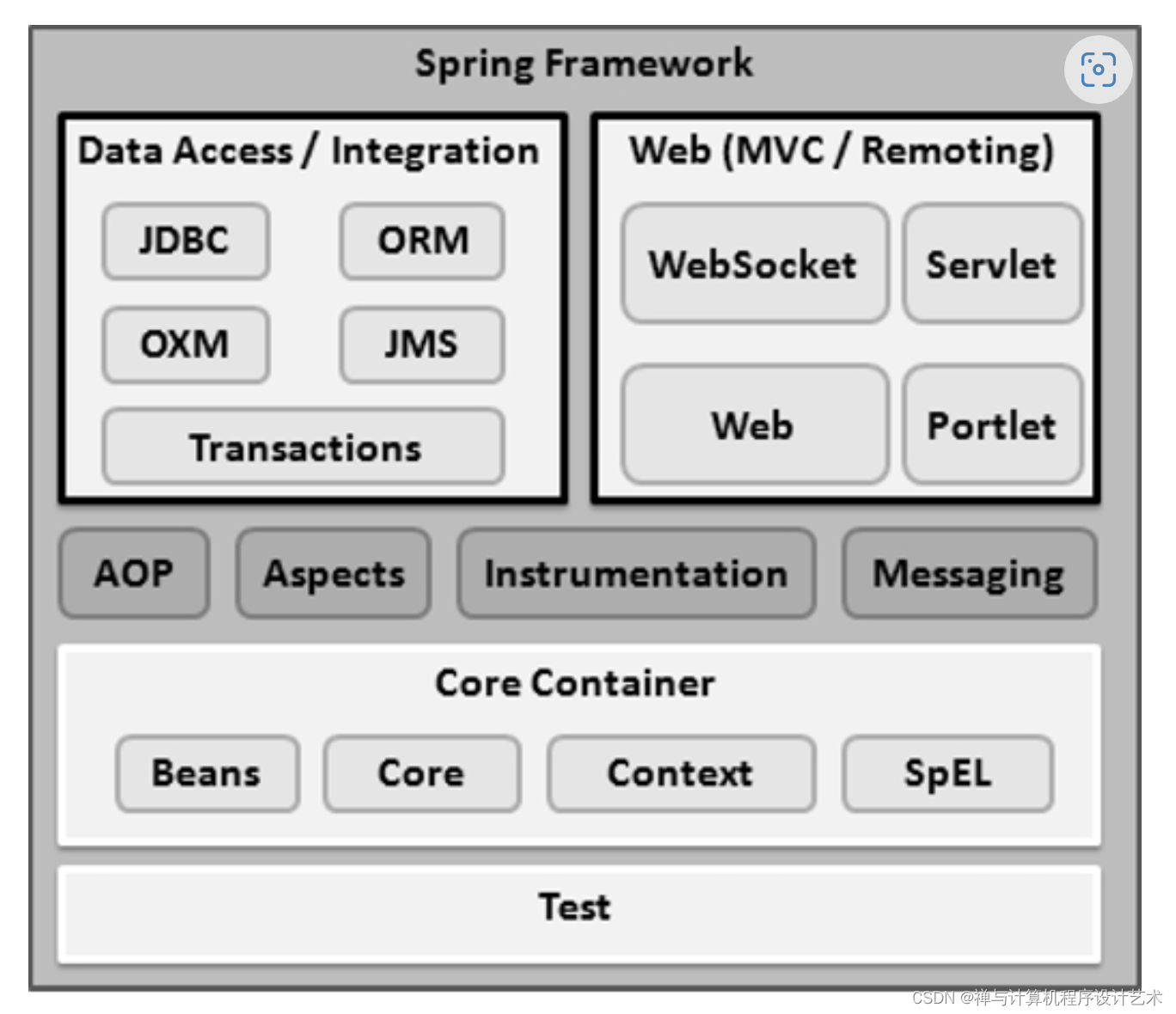
【成为架构师课程系列】怎样进行概念架构(Conceptual Architecture)?
目录 前言 什么是概念架构 概念架构阶段的3个步骤 初步设计 高层分割 分层式概念服务架构 Layer:逻辑层 Tier: 物理层 按通用性分层 技术堆叠 考虑非功能需求 【禅与计算机程序设计艺术:更多阅读】 前言 胜兵先胜而后求战,败兵先站而后求胜。…...
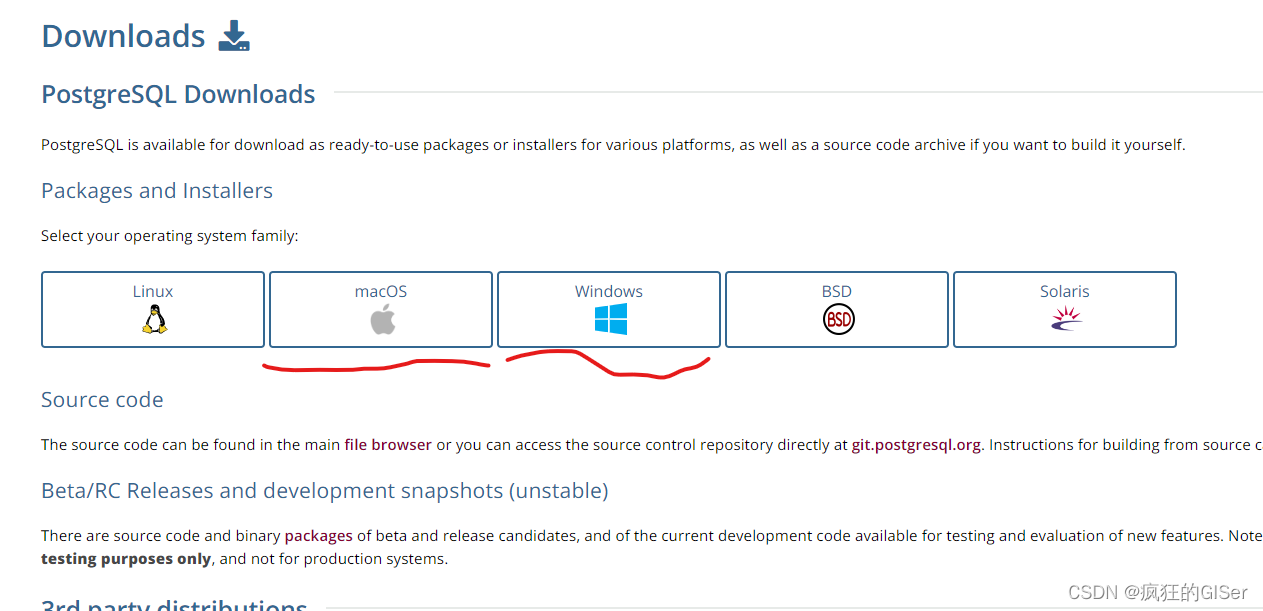
PostgreSQL的下载安装教程(macOS、Windows)
postgresql是GIS服务端几乎不可避免要打交道的数据库。因为mysql的空间扩展真是不尽人意。所以想要学会GIS服务端知识,postgresql(下文简称pg)你是必须要会的。 首先要知道,pg是一个空间数据库,和普通数据库不同的是pg支持空间数据的存储与操作。这里所谓的空间数据一般指…...
98年的确实卷,公司新来的卷王,我们这帮老油条真干不过.....
都说00后躺平了,但是有一说一,该卷的还是卷。这不,前段时间我们公司来了个00后,工作没两年,跳槽到我们公司起薪18K,都快接近我了。后来才知道人家是个卷王,从早干到晚就差搬张床到工位睡觉了。 …...
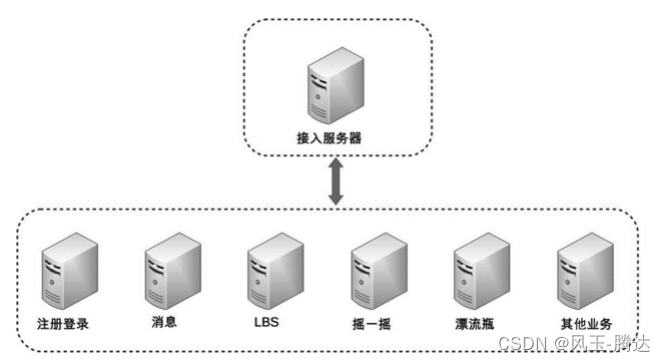
软件架构知识2-系统复杂度
架构设计的真正目的:是为了解决软件系统复杂度带来的问题,一个解决方案。 系统复杂度,如何入手: 1、通过熟悉和理解需求,识别系统复杂性所在的地方,然后针对这些复杂点进行架构设计。 2、架构设计并不是要…...
JavaSE学习day4_02 数组(超级重点)
3.数组 3.1什么是数组 数组就是存储数据长度固定的容器,存储多个数据的数据类型要一致。 3.2数组定义格式 3.2.1第一种(常用) 数据类型[] 数组名 示例: int[] arr; double[] arr; char[] arr; 3.2.2第二种(在…...
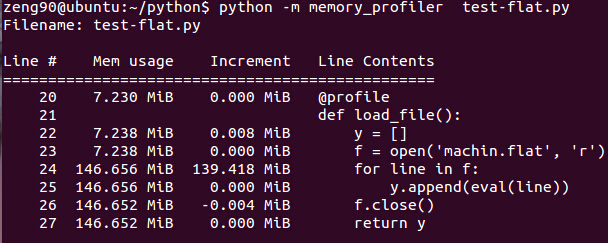
Theano教程:Python的内存管理
在写大型程序时候的一大挑战是如何保证最少的内存使用率。但是在Python中的内存管理是比较简单的。Python显示分配内存,使用引用计数系统管理对象,当指向某一个对象的引用数变为 0 的时候,该对象所占的内存就会被释放。理论上听起来很不错&am…...

Linux | Liunx安装Tomcat(Ubuntu版)
目录 一、下载并上传Tomcat压缩包到Ubuntu 1.1 下载并解压 1.2 执行 startup.sh 文件 二、验证Tomcat启动是否成功 2.1 查看启动日志 2.2 查看启动进程 三、Windows访问 Tomcat 服务 四、停止 Tomcat 服务 Tomcat是一款Web服务器,开发Web项目基本上都会用到…...

缓冲区浅析
缓冲区 程序运行输入数据时,从键盘的输入先存储到缓冲区,只有当缓冲区满或者输入回车时程序才会真正地从缓冲区读入数据 int main() {int a, b;cin >> a >> b;return 0; }in: 1 2\n 例如这里输入空格时程序没有输出,而是将空格…...
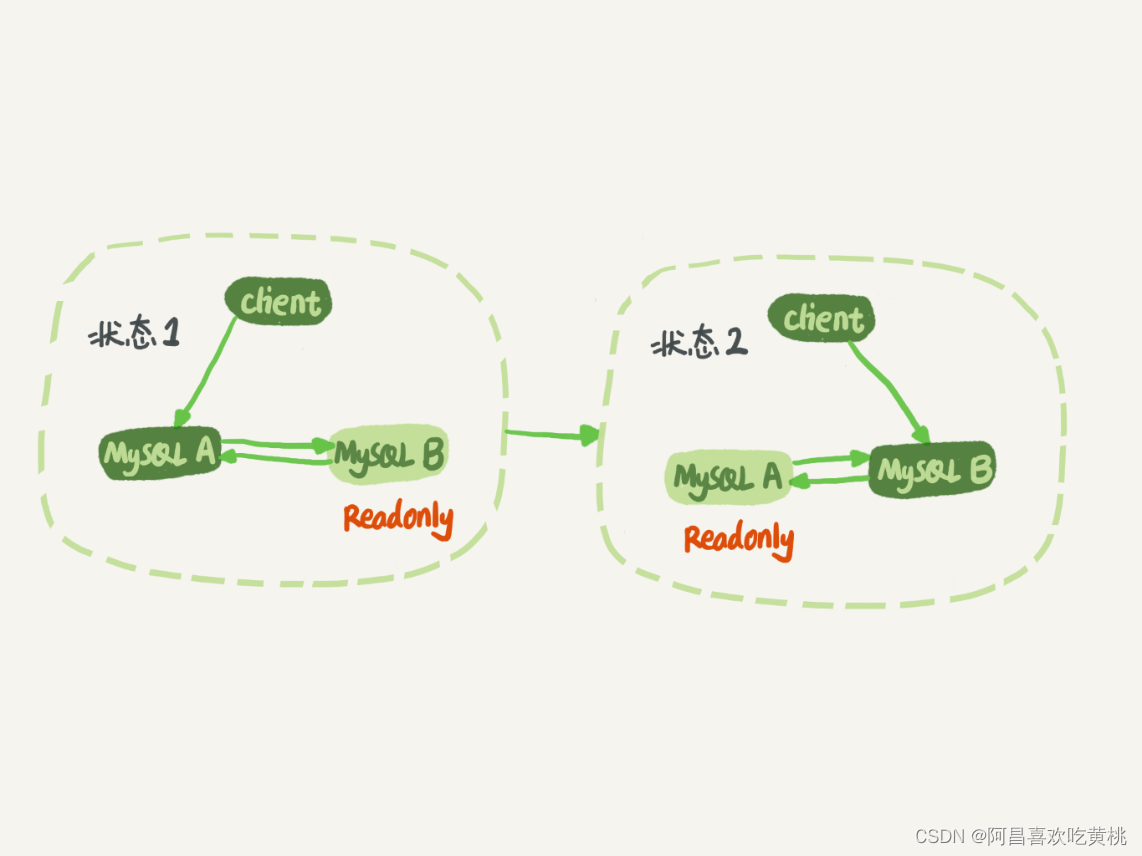
Day888.MySQL是怎么保证主备一致的 -MySQL实战
MySQL是怎么保证主备一致的 Hi,我是阿昌,今天学习记录的是关于MySQL是怎么保证主备一致的内容。 MySQL 能够成为现下最流行的开源数据库,binlog 功不可没。 在最开始,MySQL 是以容易学习和方便的高可用架构,被开发人…...

互联网舆情监测系统的发展阶段,TOOM互联网舆情监测系统有哪些?
互联网舆情监测系统是一种利用计算机技术对互联网上的大量信息进行实时监测、分析和评估的工具,旨在了解公众对某一事件、话题或品牌等的态度、情感倾向和影响力等。通过对社交媒体、论坛、新闻媒体等多个渠道的数据采集和处理,系统能够实现舆情事件的追…...
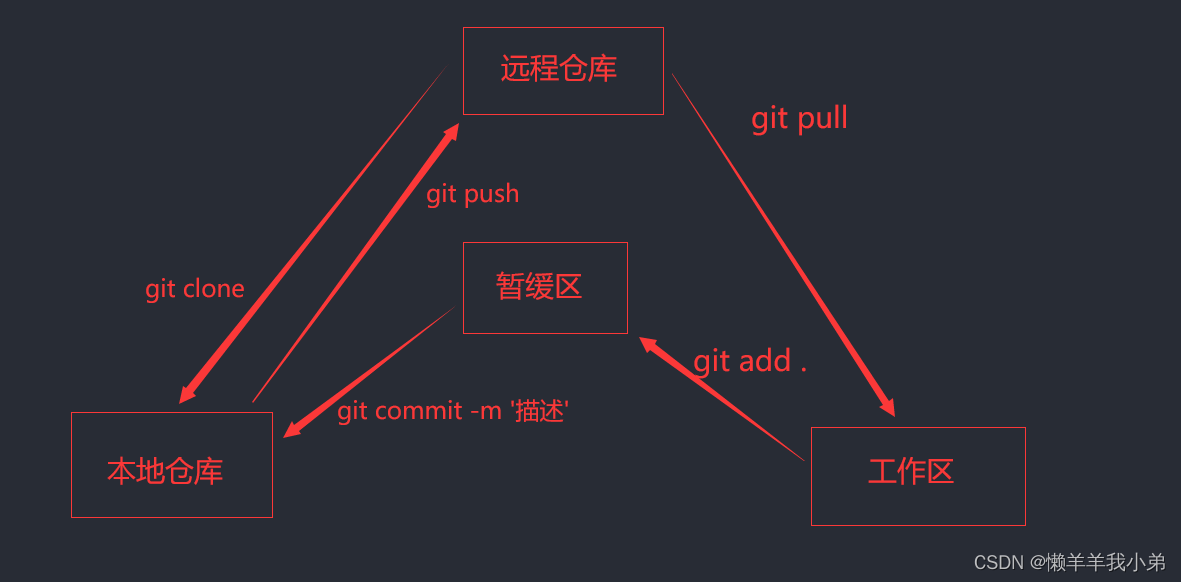
GIT命令操作大全
文章目录一、前言二、工作模块2.1 Workspace:工作区2.2 Index / Stage:暂存区2.3 Repository:本地仓库2.4Remote:远程仓库三、GIT基本配置四、GIT项目代码管理4.1 初始化git仓库4.2 提交到暂存区(stage)4.3 将暂存区的文件恢复到工…...
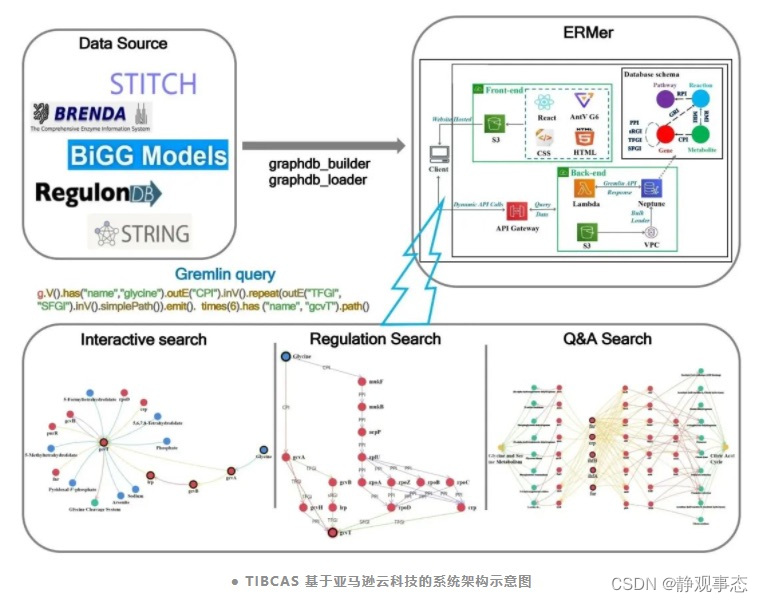
突破传统开发模式,亚马逊云科技助力中科院加速推动合成生物学
当数字技术成为整个社会运行的底座,生物科学也能借力云计算从诸多繁琐重复的工作中解放出来,专注于生物设计与创新。来看看亚马逊云科技如何与TIBCAS合作,推动合成生物学的发展。 明确核心需求,选择合作伙伴 TIBCAS选择与亚马逊…...

分享开放通达信l2接口的过程,开发之后怎么使用?
随着互联网的不断进步,信息技术的不断发展,通达信l2接口技术逐步成熟。那么,这些开放通达信l2接口开发的过程是怎么样的呢?期间又会遇到什么问题,开放之后又会怎么使用呢?这篇文章带你深入了解。 通达信l2接口不像一…...
33、基于51单片机老人防跌倒蜂鸣器报警系统加速度检测
背景技术 老年人出门由于身体不灵活、视力较差,容易发生跌倒,现用的老年人跌倒报警装置是通过无线对讲系统研发的,它外观精美,自动化程度高,有很强的专业性,但是,设计者忽略了一个问题…...
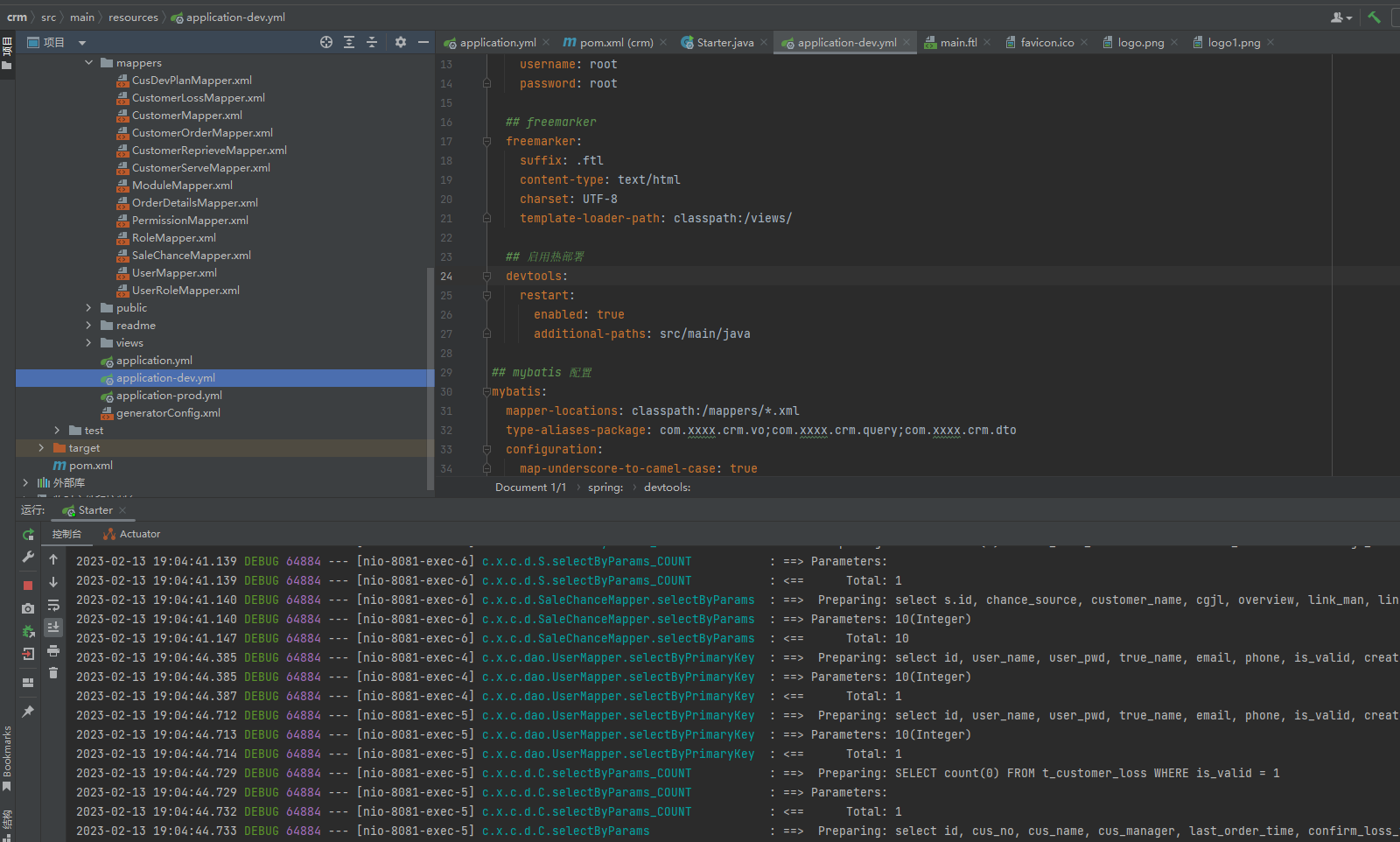
【项目】基于SpringBoot+Freemarker+Mybatis+MySQL+LayUI实现CRM智能办公系统
这里写目录标题CRM基本概念CRM分类模块功能描述项目代码application-dev.yml部分页面代码CRM基本概念 圈内存在这么一句话:“世上本来没有 CRM,大家的生意越来越难做了,才有了 CRM。” 在同质化竞争时代,顾客资产尤为重要&#x…...
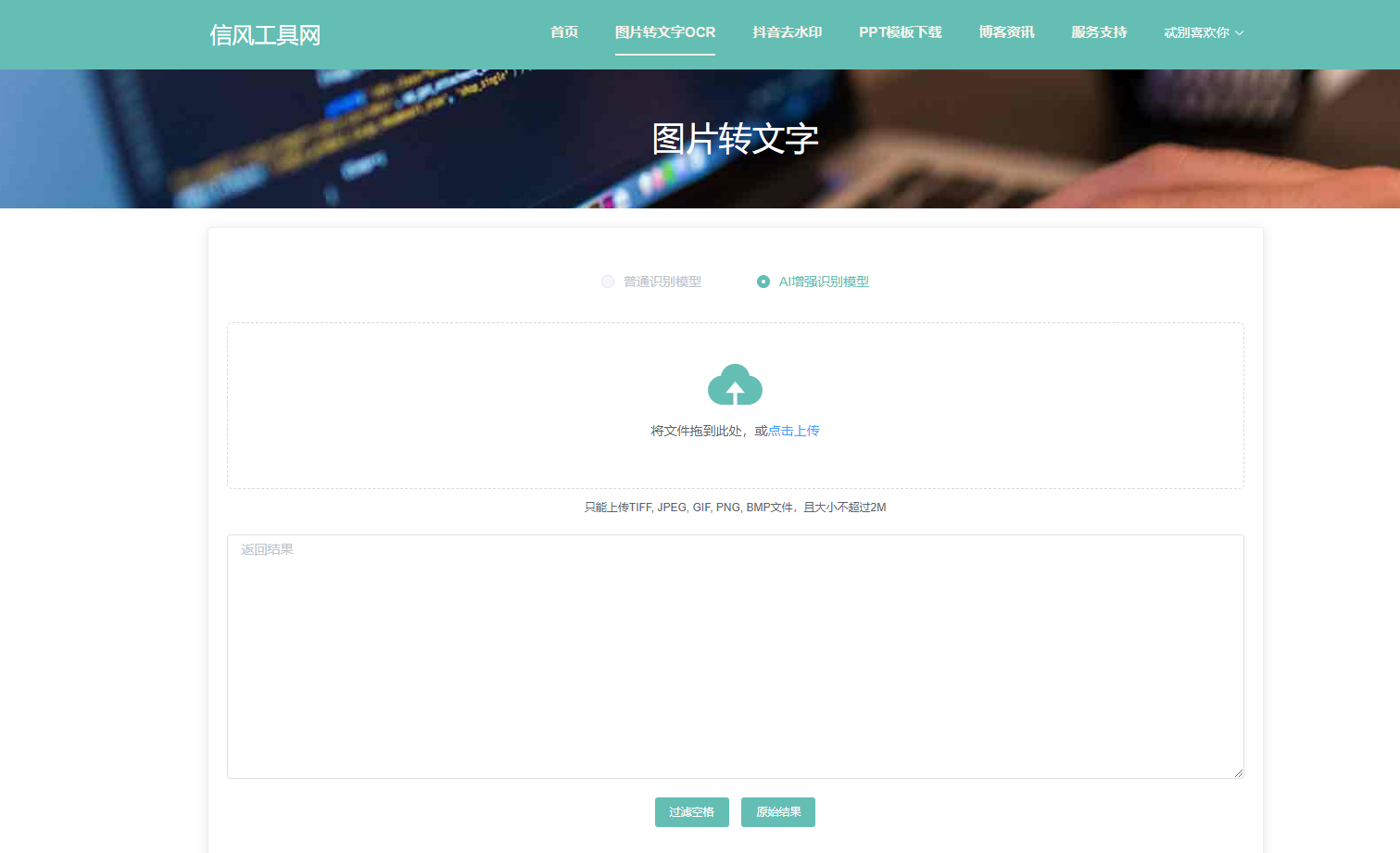
手写识别字体的步骤是什么?怎么识别图片中的文字?
手写识别字体的步骤是什么?怎么识别图片中的文字? 1. 打开信风工具网,点击拍照按钮,选择拍图识字模式,对准需要识别的文件进行拍摄。在线工具地址: https://ocr.bytedance.zj.cn/image/ImageT…...
)
智能分析平台国产化架构:如何替换国外技术?(华为云实践)
智能分析平台国产化架构实践:基于华为云的全栈替换指南 副标题:从国外组件到国产生态的平滑迁移之路 摘要/引言 当企业的智能分析平台还在依赖Hadoop、Oracle、Tableau等国外技术时,合规风险、安全漏洞、供应链中断已成为悬在头顶的“达摩…...

4345464
434554584...

4348464
42435454...

打造 Spring Boot + Vue 的库存管理系统:技术融合与实践
基于springbootvue库存管理系统springbootvuemybatismysqlspringboot在当今数字化浪潮下,构建高效的库存管理系统对于企业运营至关重要。本文将带大家走进基于 Spring Boot Vue 技术栈,搭配 MyBatis 和 MySQL 的库存管理系统开发之旅。 Spring Boot&…...

强烈安利! AI论文工具,千笔AI VS 灵感风暴AI,专科生必备神器!
随着人工智能技术的迅猛发展,AI辅助写作工具已逐渐成为高校学生完成论文的重要帮手。无论是开题报告、文献综述还是整篇论文的撰写,越来越多的学生开始借助AI工具提升效率、降低写作难度。然而,面对市场上种类繁多的AI写作软件,许…...

2026最新!9个AI论文软件测评:自考毕业论文写作必备工具推荐
随着人工智能技术的持续发展,AI写作工具在学术领域的应用日益广泛。对于自考学生而言,撰写毕业论文不仅是学业的重要环节,更是一次综合能力的考验。然而,面对选题困难、资料搜集繁琐、格式规范不熟等问题,许多考生感到…...
光储并网仿真:光伏电池模型、MPPT控制、蓄电池充放电控制、双向D...)
基于虚拟同步发电机(VSG)光储并网仿真:光伏电池模型、MPPT控制、蓄电池充放电控制、双向D...
基于虚拟同步发电机(vsg)光储并网仿真 光伏电池模型,MPPT控制,蓄电池充放电控制,双向DC/DC变换器,并网逆变器,有功频率控制,无功电压控制,VSG控制,电压电流双…...

hs - 深入剖析LLM提示词注入挑战
摘要: 本文将详细拆解名为 hs 的CTF挑战。该挑战的核心是利用提示词注入漏洞,从一个大型语言模型(LLM)服务中提取隐藏的flag。文章将从挑战背景分析入手,系统性地梳理攻击思路,复现从信息搜集、初步试探到最…...
)
华为OD机考双机位C卷 - 挑选宝石 (Java)
挑选宝石 2026华为OD机试双机位C卷 - 华为OD上机考试双机位C卷 华为OD机试双机位C卷真题目录(Java)点击查看: 【全网首发】2026华为OD机位C卷 机考真题题库含考点说明以及在线OJ(Java题解) 题目描述 游乐园有一款互动游戏,游戏开始时会提供n个宝石,每个宝石都一个属性值…...

YOLO26改进86:全网首发--c3k2模块添加DynamicFilter模块
论文介绍 配备多头自注意力机制(MHSA)的模型在计算机视觉领域已取得显著性能。这类模型的计算复杂度与输入特征图像素数量的平方成正比,导致处理速度较慢,尤其在处理高分辨率图像时更为明显。 为解决这一问题,研究者提出新型令牌混合器作为MHSA的替代方案:基于快速傅里叶…...