基于UKF-IMM无迹卡尔曼滤波与交互式多模型的轨迹跟踪算法matlab仿真,对比EKF-IMM和UKF
目录
1.程序功能描述
2.测试软件版本以及运行结果展示
3.核心程序
4.本算法原理
5.完整程序
1.程序功能描述
基于UKF-IMM无迹卡尔曼滤波与交互式多模型的轨迹跟踪算法matlab仿真,对比EKF-IMM和UKF。
2.测试软件版本以及运行结果展示
MATLAB2022A版本运行





3.核心程序
.............................................................................
% 绘制目标运动与传感器分布的图形,展示 IMM - UKF 算法的跟踪效果
%目标运动与传感器分布
figure
% 绘制目标的真实轨迹
plot(TargetState(1,:),TargetState(4,:),'k','LineWidth',2);
hold on
% 循环处理每个节点
for i = 1:NumberNode% 绘制 IMM - UKF 算法的状态估计轨迹plot(Xfstate(1,:),Xfstate(4,:),'-mo',...'LineWidth',1,...'MarkerSize',6,...'MarkerEdgeColor','k',...'MarkerFaceColor',[0.5,0.9,0.0]);hold on% 绘制真实节点的位置plot(NodeDistribution(1,i),NodeDistribution(2,i),'bo','LineWidth',1);hold on% 在节点位置旁边标注节点编号text(NodeDistribution(1,i)+0.5,NodeDistribution(2,i)+0.5,num2str(i));hold on% 绘制 IMM - UKF 算法估计的节点位置plot(pest(1,i),pest(2,i),'rs','LineWidth',1);hold on% 添加图例说明不同线条和标记的含义legend('真实轨迹','IMM-UKF估计轨迹','真实节点','IMM-UKF节点');% 设置图形标题title('跟踪效果对比');
end
% 设置坐标轴为正方形,使图形比例合适
axis square% 绘制目标运动与传感器分布的图形,展示 IMM - EKF 算法的跟踪效果
figure
% 绘制目标的真实轨迹
plot(TargetState(1,:),TargetState(4,:),'k','LineWidth',2);
hold on
% 循环处理每个节点
for i = 1:NumberNode% 绘制 IMM - EKF 算法的状态估计轨迹plot(Xfstate2(1,:),Xfstate2(4,:),'-mo',...'LineWidth',1,...'MarkerSize',6,...'MarkerEdgeColor','k',...'MarkerFaceColor',[0.5,0.9,0.0]);hold on% 绘制真实节点的位置plot(NodeDistribution(1,i),NodeDistribution(2,i),'bo','LineWidth',1);hold on% 在节点位置旁边标注节点编号text(NodeDistribution(1,i)+0.5,NodeDistribution(2,i)+0.5,num2str(i));hold on% 绘制 IMM - EKF 算法估计的节点位置plot(pest2(1,i),pest2(2,i),'rs','LineWidth',1);hold on% 添加图例说明不同线条和标记的含义legend('真实轨迹','IMM-EKF估计轨迹','真实节点','IMM-EKF节点');% 设置图形标题title('跟踪效果对比');
end
% 设置坐标轴为正方形,使图形比例合适
axis square% 绘制目标运动与传感器分布的图形,展示 UKF 算法的跟踪效果
figure
% 绘制目标的真实轨迹
plot(TargetState(1,:),TargetState(4,:),'k','LineWidth',2);
hold on
% 循环处理每个节点
for i = 1:NumberNode% 绘制 UKF 算法的状态估计轨迹plot(Para_sensor3(1,:),Para_sensor3(4,:),'-mo',...'LineWidth',1,...'MarkerSize',6,...'MarkerEdgeColor','k',...'MarkerFaceColor',[0.5,0.9,0.0]);hold on% 绘制真实节点的位置plot(NodeDistribution(1,i),NodeDistribution(2,i),'bo','LineWidth',1);hold on% 在节点位置旁边标注节点编号text(NodeDistribution(1,i)+0.5,NodeDistribution(2,i)+0.5,num2str(i));hold on% 绘制 UKF 算法估计的节点位置plot(pest3(1,i),pest3(2,i),'rs','LineWidth',1);hold on% 添加图例说明不同线条和标记的含义legend('真实轨迹','UKF估计轨迹','真实节点','UKF节点');% 设置图形标题title('跟踪效果对比');
end
% 设置坐标轴为正方形,使图形比例合适
axis square% 绘制不同算法的误差随时间变化的曲线
figure
% 绘制 IMM - UKF 算法的误差曲线
plot(tms,err1(1,:),'-bs',...'LineWidth',1,...'MarkerSize',6,...'MarkerEdgeColor','k',...'MarkerFaceColor',[0.9,0.0,0.0]);
hold on;
% 绘制 IMM - EKF 算法的误差曲线
plot(tms,err2(1,:),'-mo',...'LineWidth',1,...'MarkerSize',6,...'MarkerEdgeColor','k',...'MarkerFaceColor',[0.5,0.9,0.0]);
hold on;
% 绘制 UKF 算法的误差曲线
plot(tms,err3(1,:),'-r>',...'LineWidth',1,...'MarkerSize',6,...'MarkerEdgeColor','k',...'MarkerFaceColor',[0.9,0.9,0.0]);
hold on;
% 添加图例,说明不同曲线对应的算法
legend('IMM - UKF ','IMM - EKF','UKF');
% 设置 x 轴标签为时间步
xlabel('Time Steps')
% 设置 y 轴标签为误差
ylabel('error')% 绘制不同算法的平均误差柱状图
figure
% 绘制三个算法的平均误差柱状图
bar([mean(err1(1,:)),mean(err2(1,:)),mean(err3(1,:))]);
% 设置 x 轴标签,说明每个柱子对应的算法
xlabel(['1:IMM - UKF, 2:IMM - EKF, 3:UKF']);
% 设置 y 轴标签为误差
ylabel('error')
934.本算法原理
在许多工程实践中,往往不能直接得到所需要的状态变量的真实值。例如雷达在探测目标时,可以通过回波信号等计算出目标的距离、速度和角度等信息。但雷达探测过程中会存在干扰(系统噪声、地杂波和非目标信号等)的问题,这些干扰会导致回波信号中夹杂有随机噪声。我们要在有随机噪声的回波信号中分离目标的运动状态量,准确的得到这个状态量往往是不可能的,只能根据观测信号估计这些状态变量。卡尔曼滤波就是这种通过估计或预测降低噪声影响的一种好的方法。特别是在线性系统中,卡尔曼滤波是最优的滤波算法。
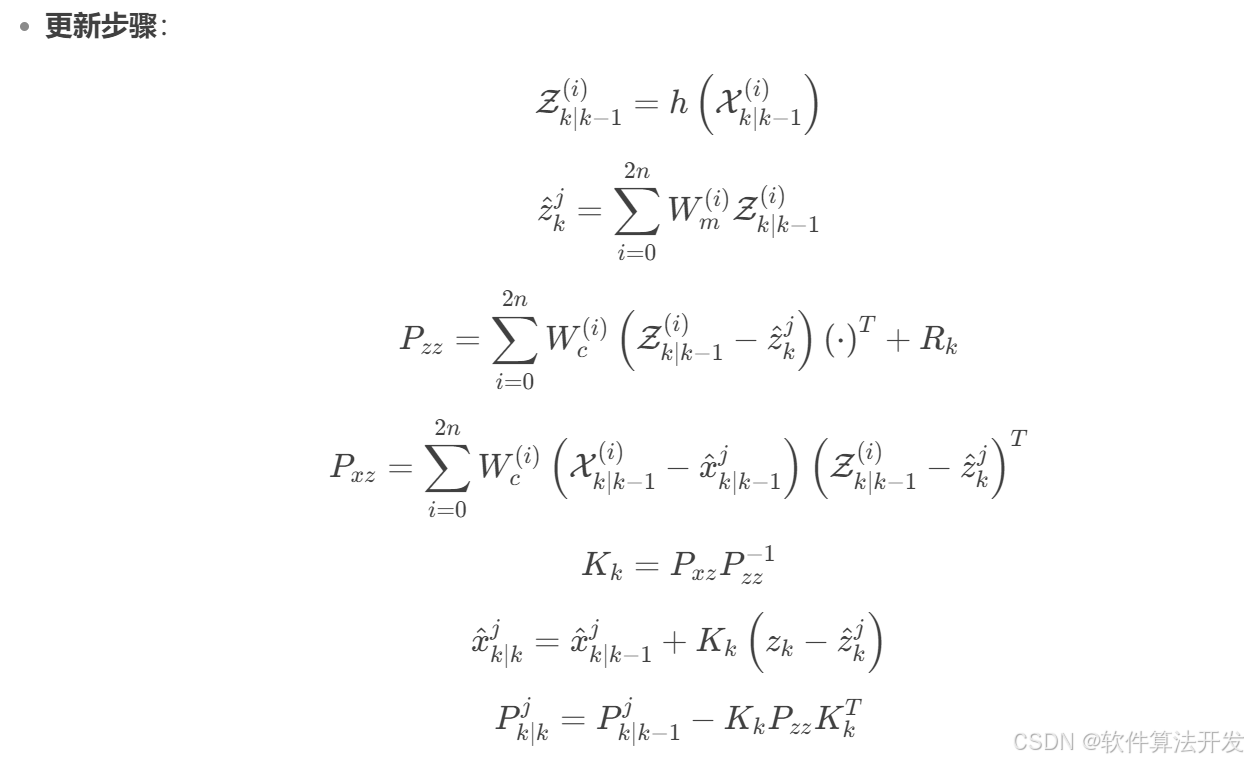
在轨迹跟踪问题中,系统状态通常随时间变化,并且受到过程噪声的影响;同时,对系统状态的观测也包含观测噪声。我们的目标是根据一系列的观测值来估计系统的真实状态。UKF 是一种用于非线性系统状态估计的滤波算法。与传统的扩展卡尔曼滤波(EKF)不同,UKF 不依赖于对非线性函数的线性化,而是通过一组确定性采样点(Sigma 点)来近似状态的概率分布,从而更准确地处理非线性问题。
在kalman滤波算法中用到了状态转移方程和量测方程,被估计量随着时间的变化,呈现的是一个动态估计。在目标跟踪中,不需要知道目标的运动模型就能实时的修正目标的状态变量(速度、距离等),具有良好的适应性。但是当目标实施机动变化(突然加、减速或急转弯等),仅仅采用基本的kalman滤波算法往往得不到理想的结果。这时就需要采用自适应算法。交互多模型(IMM)就应用而生。
目标交互多模型kalman滤波算法在机动目标跟踪领域得到广泛应用。IMM算法使用两个或者多个模型来描述工作过程中可能出现的状态,最后通过有效的加权融合进行系统状态估计,很好的克服了单个模型估计误差较大的问题。
IMM 算法用于处理系统在不同模式下运行的情况。它假设系统存在多个可能的运行模式,每个模式对应一个不同的状态模型,通过在这些模型之间进行交互和切换,以适应系统模式的变化,从而提高状态估计的准确性。




5.完整程序
VVV
相关文章:
基于UKF-IMM无迹卡尔曼滤波与交互式多模型的轨迹跟踪算法matlab仿真,对比EKF-IMM和UKF
目录 1.程序功能描述 2.测试软件版本以及运行结果展示 3.核心程序 4.本算法原理 5.完整程序 1.程序功能描述 基于UKF-IMM无迹卡尔曼滤波与交互式多模型的轨迹跟踪算法matlab仿真,对比EKF-IMM和UKF。 2.测试软件版本以及运行结果展示 MATLAB2022A版本运行 3.核心程序 .…...

分布式事务组件Seata简介与使用,搭配Nacos统一管理服务端和客户端配置
文章目录 一. Seata简介二. 官方文档三. Seata分布式事务代码实现0. 环境简介1. 添加undo_log表2. 添加依赖3. 添加配置4. 开启Seata事务管理5. 启动演示 四. Seata Server配置Nacos1. 修改配置类型2. 创建Nacos配置 五. Seata Client配置Nacos1. 增加Seata关联Nacos的配置2. 在…...

JavaScript常用的内置构造函数
JavaScript作为一种广泛应用的编程语言,提供了丰富的内置构造函数,帮助开发者处理不同类型的数据和操作。这些内置构造函数在创建和操作对象时非常有用。本文将详细介绍JavaScript中常用的内置构造函数及其用途。 常用内置构造函数概述 1. Object Obj…...
25寒假算法刷题 | Day1 | LeetCode 240. 搜索二维矩阵 II,148. 排序链表
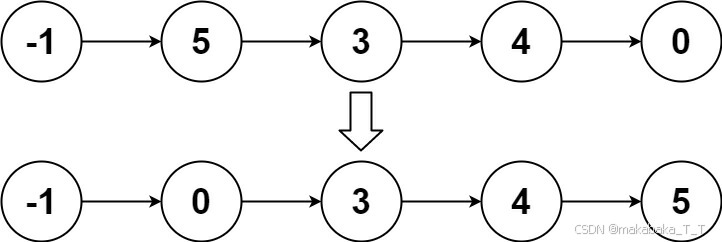
目录 240. 搜索二维矩阵 II题目描述题解 148. 排序链表题目描述题解 240. 搜索二维矩阵 II 点此跳转题目链接 题目描述 编写一个高效的算法来搜索 m x n 矩阵 matrix 中的一个目标值 target 。该矩阵具有以下特性: 每行的元素从左到右升序排列。每列的元素从上到…...

MQTT知识
MQTT协议 MQTT 是一种基于发布/订阅模式的轻量级消息传输协议,专门针对低带宽和不稳定网络环境的物联网应用而设计,可以用极少的代码为联网设备提供实时可靠的消息服务。MQTT 协议广泛应用于物联网、移动互联网、智能硬件、车联网、智慧城市、远程医疗、…...

【机器学习与数据挖掘实战】案例11:基于灰色预测和SVR的企业所得税预测分析
【作者主页】Francek Chen 【专栏介绍】 ⌈ ⌈ ⌈机器学习与数据挖掘实战 ⌋ ⌋ ⌋ 机器学习是人工智能的一个分支,专注于让计算机系统通过数据学习和改进。它利用统计和计算方法,使模型能够从数据中自动提取特征并做出预测或决策。数据挖掘则是从大型数据集中发现模式、关联…...
新一代搜索引擎,是 ES 的15倍?
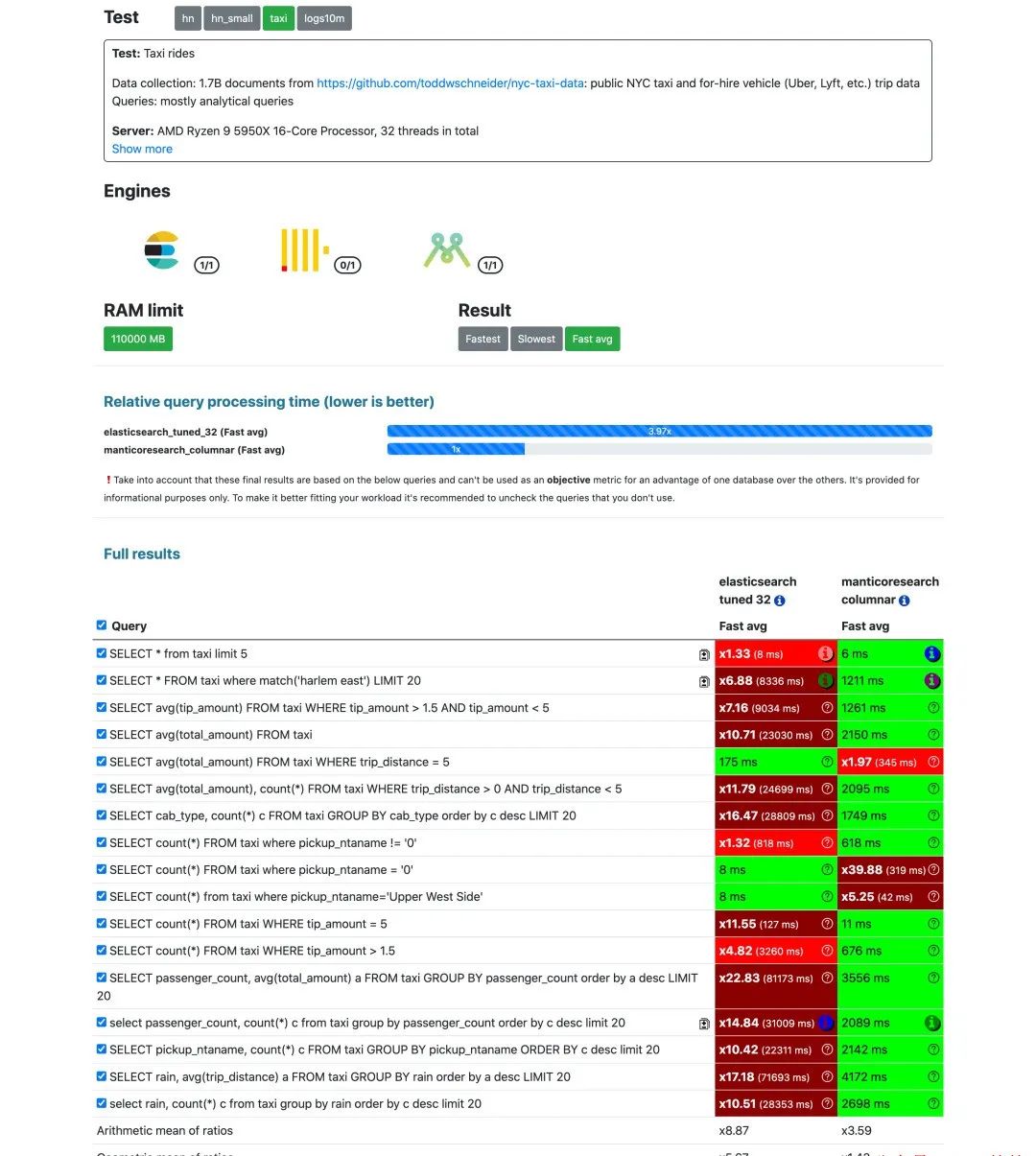
Manticore Search介绍 Manticore Search 是一个使用 C 开发的高性能搜索引擎,创建于 2017 年,其前身是 Sphinx Search 。Manticore Search 充分利用了 Sphinx,显着改进了它的功能,修复了数百个错误,几乎完全重写了代码…...

使用 Context API 管理临时状态,避免 Redux/Zustand 的持久化陷阱
在开发 React Native 应用时,我们经常需要管理全局状态,比如用户信息、主题设置、网络状态等。而对于某些临时状态,例如 数据同步进行中的状态 (isSyncing),我们应该选择什么方式来管理它? 在项目开发过程中ÿ…...
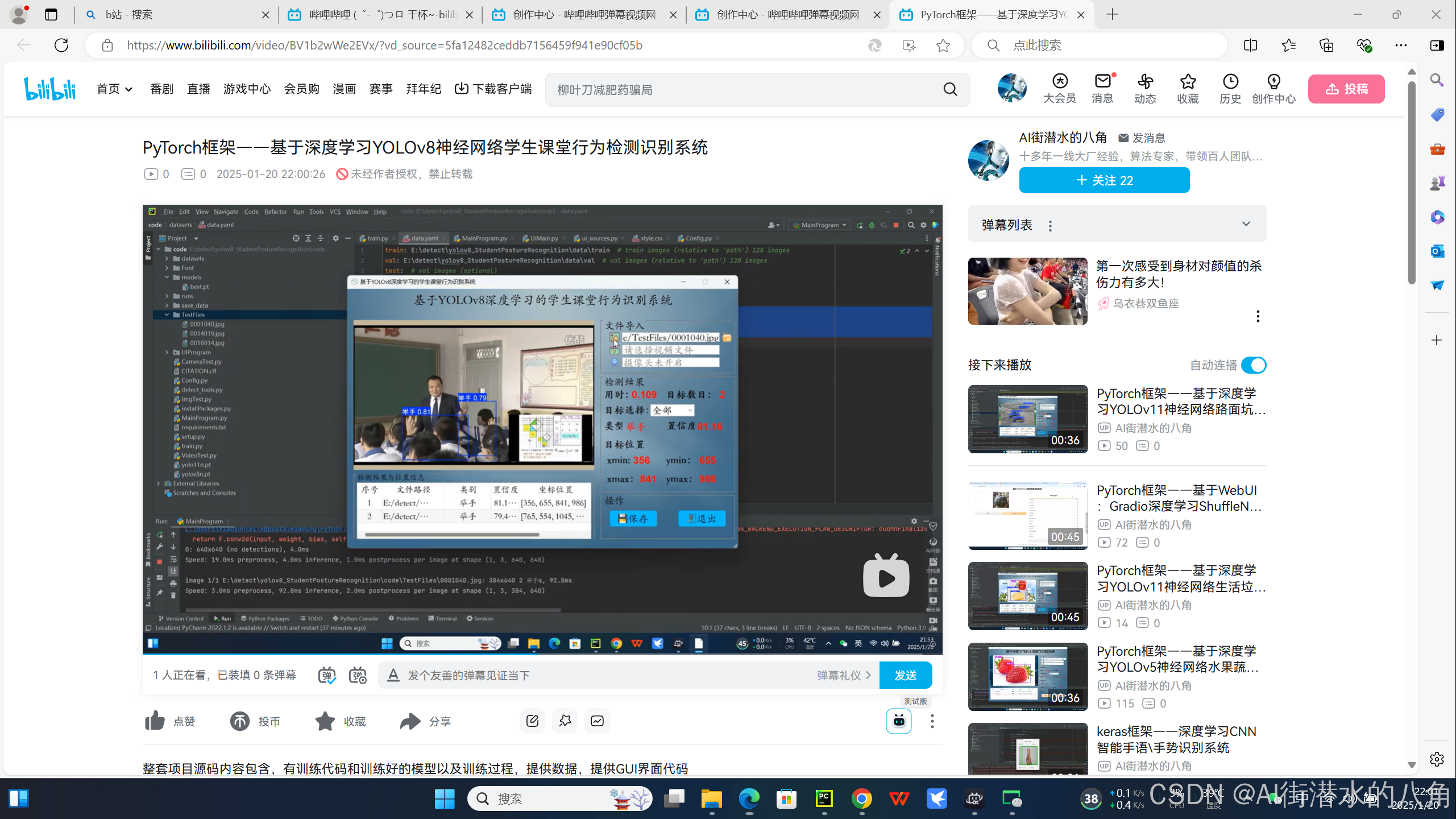
PyTorch框架——基于深度学习YOLOv8神经网络学生课堂行为检测识别系统
基于YOLOv8深度学习的学生课堂行为检测识别系统,其能识别三种学生课堂行为:names: [举手, 读书, 写字] 具体图片见如下: 第一步:YOLOv8介绍 YOLOv8 是 ultralytics 公司在 2023 年 1月 10 号开源的 YOLOv5 的下一个重大更新版本…...
word2vec 实战应用介绍
Word2Vec 是一种由 Google 在 2013 年推出的重要词嵌入模型,通过将单词映射为低维向量,实现了对自然语言处理任务的高效支持。其核心思想是利用深度学习技术,通过训练大量文本数据,将单词表示为稠密的向量形式,从而捕捉单词之间的语义和语法关系。以下是关于 Word2Vec 实战…...

C# 操作符重载对象详解
.NET学习资料 .NET学习资料 .NET学习资料 一、操作符重载的概念 在 C# 中,操作符重载允许我们为自定义的类或结构体定义操作符的行为。通常,我们熟悉的操作符,如加法()、减法(-)、乘法&#…...

python学opencv|读取图像(五十四)使用cv2.blur()函数实现图像像素均值处理
【1】引言 前序学习进程中,对图像的操作均基于各个像素点上的BGR值不同而展开。 对于彩色图像,每个像素点上的BGR值为三个整数,因为是三通道图像;对于灰度图像,各个像素上的BGR值是一个整数,因为这是单通…...
: 非极大值抑制(Non-Maximum Suppression, NMS))
CNN的各种知识点(四): 非极大值抑制(Non-Maximum Suppression, NMS)
非极大值抑制(Non-Maximum Suppression, NMS) 1. 非极大值抑制(Non-Maximum Suppression, NMS)概念:算法步骤:具体例子:PyTorch实现: 总结: 1. 非极大值抑制(…...

虚幻基础16:locomotion direction
locomotion locomotion:角色运动系统的总称:包含移动、奔跑、跳跃、转向等。 locomotion direction 玩家输入 玩家输入:通常代表玩家想要的移动方向。 direction 可以计算当前朝向与移动方向的Δ。从而实现朝向与移动(玩家输入)方向的分…...

C++游戏开发实战:从引擎架构到物理碰撞
📝个人主页🌹:一ge科研小菜鸡-CSDN博客 🌹🌹期待您的关注 🌹🌹 1. 引言 C 是游戏开发中最受欢迎的编程语言之一,因其高性能、低延迟和强大的底层控制能力,被广泛用于游戏…...

代理模式——C++实现
目录 1. 代理模式简介 2. 代码示例 1. 代理模式简介 代理模式是一种行为型模式。 代理模式的定义:由于某些原因需要给某对象提供一个代理以控制该对象的访问。这时,访问对象不适合或者不能直接访问引用目标对象,代理对象作为访问对象和目标…...

什么情况下,C#需要手动进行资源分配和释放?什么又是非托管资源?
扩展:如何使用C#的using语句释放资源?什么是IDisposable接口?与垃圾回收有什么关系?-CSDN博客 托管资源的回收有GC自动触发,而非托管资源需要手动释放。 在 C# 中,非托管资源是指那些不由 CLR(…...

LeetCode 2909. 元素和最小的山形三元组 II
**### LeetCode 2909. 元素和最小的山形三元组 II 问题描述 给定一个下标从 0 开始的整数数组 nums,我们需要找到一个“山形三元组”(i, j, k)满足以下条件: i < j < knums[i] < nums[j] 且 nums[k] < nums[j] 并…...

搬迁至bilibili声明
我将搬迁到bilibili ,用户名:北苏清风 在这个用户名上的文章部分将出自csdn的这个账号,均属于本人原创...

【周易哲学】生辰八字入门讲解(八)
😊你好,我是小航,一个正在变秃、变强的文艺倾年。 🔔本文讲解【周易哲学】生辰八字入门讲解,期待与你一同探索、学习、进步,一起卷起来叭! 目录 一、六亲女命六亲星六亲宫位相互关系 男命六亲星…...

Docker 离线安装指南
参考文章 1、确认操作系统类型及内核版本 Docker依赖于Linux内核的一些特性,不同版本的Docker对内核版本有不同要求。例如,Docker 17.06及之后的版本通常需要Linux内核3.10及以上版本,Docker17.09及更高版本对应Linux内核4.9.x及更高版本。…...

React 第五十五节 Router 中 useAsyncError的使用详解
前言 useAsyncError 是 React Router v6.4 引入的一个钩子,用于处理异步操作(如数据加载)中的错误。下面我将详细解释其用途并提供代码示例。 一、useAsyncError 用途 处理异步错误:捕获在 loader 或 action 中发生的异步错误替…...
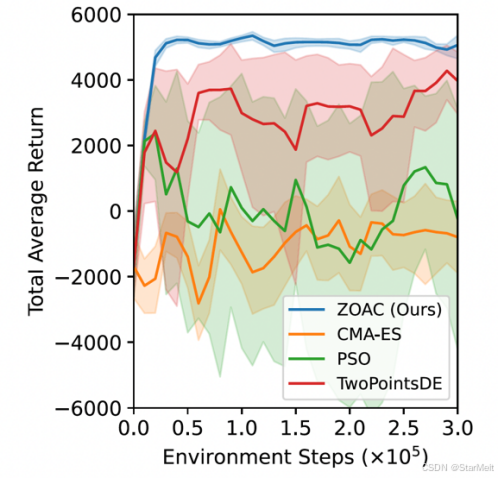
突破不可导策略的训练难题:零阶优化与强化学习的深度嵌合
强化学习(Reinforcement Learning, RL)是工业领域智能控制的重要方法。它的基本原理是将最优控制问题建模为马尔可夫决策过程,然后使用强化学习的Actor-Critic机制(中文译作“知行互动”机制),逐步迭代求解…...

《Qt C++ 与 OpenCV:解锁视频播放程序设计的奥秘》
引言:探索视频播放程序设计之旅 在当今数字化时代,多媒体应用已渗透到我们生活的方方面面,从日常的视频娱乐到专业的视频监控、视频会议系统,视频播放程序作为多媒体应用的核心组成部分,扮演着至关重要的角色。无论是在个人电脑、移动设备还是智能电视等平台上,用户都期望…...

MongoDB学习和应用(高效的非关系型数据库)
一丶 MongoDB简介 对于社交类软件的功能,我们需要对它的功能特点进行分析: 数据量会随着用户数增大而增大读多写少价值较低非好友看不到其动态信息地理位置的查询… 针对以上特点进行分析各大存储工具: mysql:关系型数据库&am…...
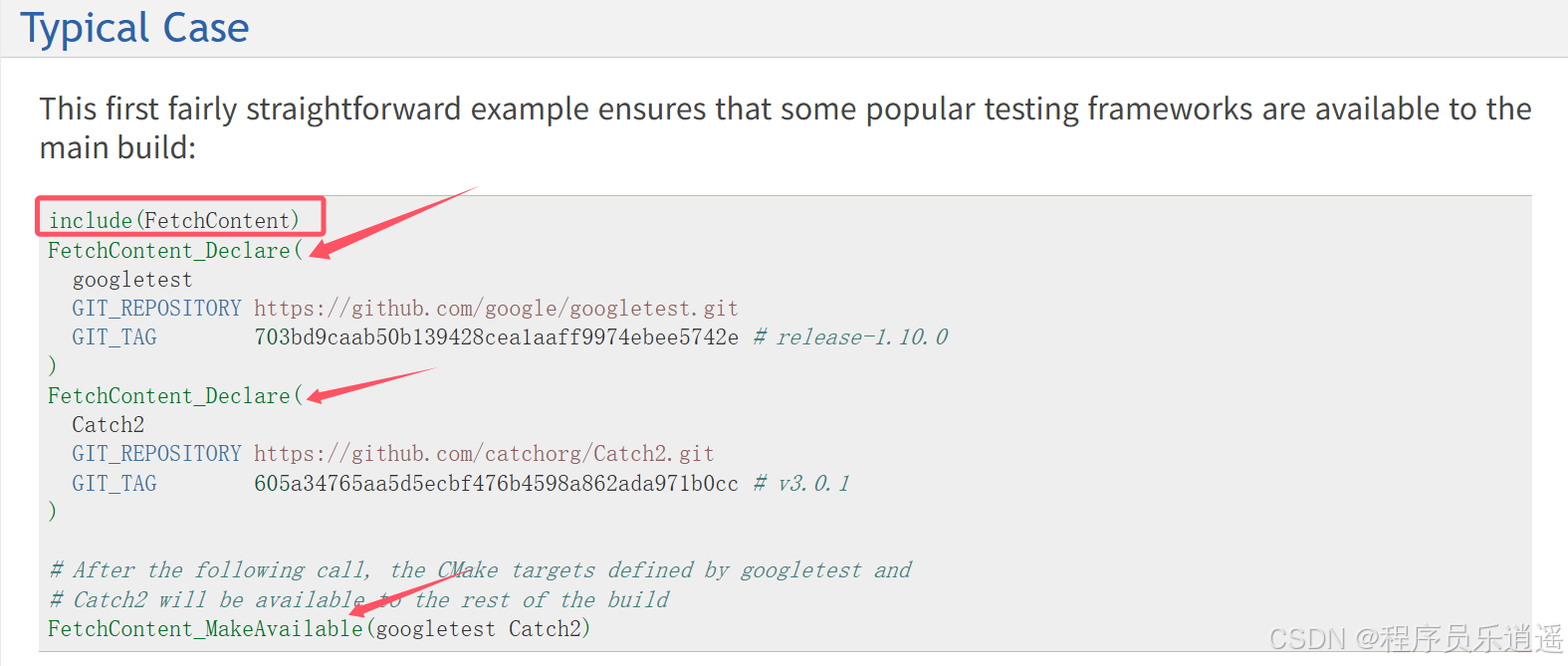
CMake 从 GitHub 下载第三方库并使用
有时我们希望直接使用 GitHub 上的开源库,而不想手动下载、编译和安装。 可以利用 CMake 提供的 FetchContent 模块来实现自动下载、构建和链接第三方库。 FetchContent 命令官方文档✅ 示例代码 我们将以 fmt 这个流行的格式化库为例,演示如何: 使用 FetchContent 从 GitH…...

Spring AI与Spring Modulith核心技术解析
Spring AI核心架构解析 Spring AI(https://spring.io/projects/spring-ai)作为Spring生态中的AI集成框架,其核心设计理念是通过模块化架构降低AI应用的开发复杂度。与Python生态中的LangChain/LlamaIndex等工具类似,但特别为多语…...

优选算法第十二讲:队列 + 宽搜 优先级队列
优选算法第十二讲:队列 宽搜 && 优先级队列 1.N叉树的层序遍历2.二叉树的锯齿型层序遍历3.二叉树最大宽度4.在每个树行中找最大值5.优先级队列 -- 最后一块石头的重量6.数据流中的第K大元素7.前K个高频单词8.数据流的中位数 1.N叉树的层序遍历 2.二叉树的锯…...

Python ROS2【机器人中间件框架】 简介
销量过万TEEIS德国护膝夏天用薄款 优惠券冠生园 百花蜂蜜428g 挤压瓶纯蜂蜜巨奇严选 鞋子除臭剂360ml 多芬身体磨砂膏280g健70%-75%酒精消毒棉片湿巾1418cm 80片/袋3袋大包清洁食品用消毒 优惠券AIMORNY52朵红玫瑰永生香皂花同城配送非鲜花七夕情人节生日礼物送女友 热卖妙洁棉…...
算法:模拟
1.替换所有的问号 1576. 替换所有的问号 - 力扣(LeetCode) 遍历字符串:通过外层循环逐一检查每个字符。遇到 ? 时处理: 内层循环遍历小写字母(a 到 z)。对每个字母检查是否满足: 与…...