亚博microros小车-原生ubuntu支持系列:21 颜色追踪
背景知识
这个测试例子用到了很多opencv的函数,举个例子。
#cv2.findContours函数来找到二值图像中的轮廓。#参数:#参数1:输 入的二值图像。通常是经过阈值处理后的图像,例如在颜色过滤之后生成的掩码。#参数2(cv2.RETR_EXTERNAL):轮廓的检索模式。有几种模式可选,常用的包括:# cv2.RETR_EXTERNAL:只检测最外层的轮廓。# cv2.RETR_LIST:检测所有的轮廓并保存到列表中。# cv2.RETR_CCOMP:检测所有轮廓并将其组织为两层的层次结构。# cv2.RETR_TREE:检测所有轮廓并重构整个轮廓层次结构。# 参数3(cv2.CHAIN_APPROX_SIMPLE):轮廓的近似方法。有两种方法可选,常用的有:# cv2.CHAIN_APPROX_SIMPLE:压缩水平、垂直和对角线方向上的所有轮廓,只保留端点。# cv2.CHAIN_APPROX_NONE:保留所有的轮廓点。#返回值: contours:包含检测到的轮廓的列表。每个轮廓由一系列点组成。
# _(下划线):层次信息,通常在后续处理中可能会用到。在这里,我们通常用下划线表示我们不关心这个返回值。我第一次看代码的时候,发现有些没理解,主要是靠deepseek 搜索了加了注释。
src/yahboom_esp32ai_car/yahboom_esp32ai_car/目录下新建astra_common.py
#!/usr/bin/env python
# encoding: utf-8
import time
import cv2 as cv
import numpy as npdef write_HSV(wf_path, value):with open(wf_path, "w") as wf:wf_str = str(value[0][0]) + ', ' + str(value[0][1]) + ', ' + str(value[0][2]) + ', ' + str(value[1][0]) + ', ' + str(value[1][1]) + ', ' + str(value[1][2])wf.write(wf_str)wf.flush()def read_HSV(rf_path):rf = open(rf_path, "r+")line = rf.readline()if len(line) == 0: return ()list = line.split(',')if len(list) != 6: return ()hsv = ((int(list[0]), int(list[1]), int(list[2])),(int(list[3]), int(list[4]), int(list[5])))rf.flush()return hsv# 定义函数,第一个参数是缩放比例,第二个参数是需要显示的图片组成的元组或者列表
# Define the function, the first parameter is the zoom ratio, and the second parameter is a tuple or list of pictures to be displayed
def ManyImgs(scale, imgarray):rows = len(imgarray) # 元组或者列表的长度 Length of tuple or listcols = len(imgarray[0]) # 如果imgarray是列表,返回列表里第一幅图像的通道数,如果是元组,返回元组里包含的第一个列表的长度# If imgarray is a list, return the number of channels of the first image in the list, if it is a tuple, return the length of the first list contained in the tuple# print("rows=", rows, "cols=", cols)# 判断imgarray[0]的类型是否是list,# 是list,表明imgarray是一个元组,需要垂直显示# Determine whether the type of imgarray[0] is list,# It is a list, indicating that imgarray is a tuple and needs to be displayed verticallyrowsAvailable = isinstance(imgarray[0], list)# 第一张图片的宽高# The width and height of the first picturewidth = imgarray[0][0].shape[1]height = imgarray[0][0].shape[0]# print("width=", width, "height=", height)# 如果传入的是一个元组# If the incoming is a tupleif rowsAvailable:for x in range(0, rows):for y in range(0, cols):# 遍历元组,如果是第一幅图像,不做变换# Traverse the tuple, if it is the first image, do not transformif imgarray[x][y].shape[:2] == imgarray[0][0].shape[:2]:imgarray[x][y] = cv.resize(imgarray[x][y], (0, 0), None, scale, scale)# 将其他矩阵变换为与第一幅图像相同大小,缩放比例为scale# Transform other matrices to the same size as the first image, and the zoom ratio is scaleelse:imgarray[x][y] = cv.resize(imgarray[x][y], (imgarray[0][0].shape[1], imgarray[0][0].shape[0]), None,scale, scale)# 如果图像是灰度图,将其转换成彩色显示# If the image is grayscale, convert it to color displayif len(imgarray[x][y].shape) == 2:imgarray[x][y] = cv.cvtColor(imgarray[x][y], cv.COLOR_GRAY2BGR)# 创建一个空白画布,与第一张图片大小相同# Create a blank canvas, the same size as the first pictureimgBlank = np.zeros((height, width, 3), np.uint8)hor = [imgBlank] * rows # 与第一张图片大小相同,与元组包含列表数相同的水平空白图像# The same size as the first picture, and the same number of horizontal blank images as the tuple contains the listfor x in range(0, rows):# 将元组里第x个列表水平排列# Arrange the x-th list in the tuple horizontallyhor[x] = np.hstack(imgarray[x])ver = np.vstack(hor) # 将不同列表垂直拼接 Concatenate different lists vertically# 如果传入的是一个列表 If the incoming is a listelse:# 变换操作,与前面相同# Transformation operation, same as beforefor x in range(0, rows):if imgarray[x].shape[:2] == imgarray[0].shape[:2]:imgarray[x] = cv.resize(imgarray[x], (0, 0), None, scale, scale)else:imgarray[x] = cv.resize(imgarray[x], (imgarray[0].shape[1], imgarray[0].shape[0]), None, scale, scale)if len(imgarray[x].shape) == 2:imgarray[x] = cv.cvtColor(imgarray[x], cv.COLOR_GRAY2BGR)# 将列表水平排列# Arrange the list horizontallyhor = np.hstack(imgarray)ver = horreturn verclass color_follow:def __init__(self):'''初始化一些参数Initialize some parameters'''self.Center_x = 0self.Center_y = 0self.Center_r = 0def object_follow(self, img, hsv_msg):src = img.copy()# 由颜色范围创建NumPy数组# Create NumPy array from color rangesrc = cv.cvtColor(src, cv.COLOR_BGR2HSV)lower = np.array(hsv_msg[0], dtype="uint8")upper = np.array(hsv_msg[1], dtype="uint8")# 根据特定颜色范围创建mask,inRange的作用是根据阈值进行二值化:阈值内的像素设置为白色(255),阈值外的设置为黑色(0)# Create a mask based on a specific color rangemask = cv.inRange(src, lower, upper)color_mask = cv.bitwise_and(src, src, mask=mask)# 将图像转为灰度图# Convert the image to grayscalegray_img = cv.cvtColor(color_mask, cv.COLOR_RGB2GRAY)# 获取不同形状的结构元素,定义一个用于形态学操作的“探针”,决定操作影响的区域大小和形状。代码是矩形的。内核越大,处理的区域范围越大(可能过度平滑细节)。# Get structure elements of different shapeskernel = cv.getStructuringElement(cv.MORPH_RECT, (5, 5))# 形态学闭操作,形态学闭运算是 先膨胀(Dilation)后腐蚀(Erosion) 的组合操作,目的是消除图像中的微小暗区(如孔洞)或断裂区域,同时保持主体结构的完整性。# Morphological closed operationgray_img = cv.morphologyEx(gray_img, cv.MORPH_CLOSE, kernel)# 图像二值化操作# Image binarization operationret, binary = cv.threshold(gray_img, 10, 255, cv.THRESH_BINARY)# 获取轮廓点集(坐标)# Get the set of contour points (coordinates)find_contours = cv.findContours(binary, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)#兼容不同版本opencvif len(find_contours) == 3:#OpenCV v3、v4-pre 或 v4-alphacontours = find_contours[1]else:# OpenCV v2.4、v4-beta 或 v4-officialcontours = find_contours[0]if len(contours) != 0:#检测到轮廓areas = []for c in range(len(contours)): areas.append(cv.contourArea(contours[c]))max_id = areas.index(max(areas))max_rect = cv.minAreaRect(contours[max_id])#计算最小外接矩形max_box = cv.boxPoints(max_rect)#获取矩形顶点坐标max_box = np.int0(max_box)#转为整数,便于绘图#计算物体的最小外接圆,参数为轮廓的点集(color_x, color_y), color_radius = cv.minEnclosingCircle(max_box)# 将检测到的颜色用原形线圈标记出来# Mark the detected color with the original shape coilself.Center_x = int(color_x)self.Center_y = int(color_y)self.Center_r = int(color_radius)cv.circle(img, (self.Center_x, self.Center_y), self.Center_r, (255, 0, 255), 2)#画圆显示物体的圆形轮廓cv.circle(img, (self.Center_x, self.Center_y), 2, (0, 0, 255), -1)# 画红色实心圆作为中心点else:self.Center_x = 0self.Center_y = 0self.Center_r = 0return img, binary, (self.Center_x, self.Center_y, self.Center_r)def Roi_hsv(self, img, Roi):'''获取某一区域的HSV的范围Get the range of HSV in a certain area:param img: Color map 彩色图 :param Roi: (x_min, y_min, x_max, y_max)Roi=(290,280,350,340):return: 图像和HSV的范围 例如:(0,0,90)(177,40,150)Image and HSV range E.g:(0,0,90)(177,40,150) '''H = [];S = [];V = []# 将彩色图转成HSV# Convert color image to HSVHSV = cv.cvtColor(img, cv.COLOR_BGR2HSV)# 画矩形框# Draw a rectangular frame# cv.rectangle(img, (Roi[0], Roi[1]), (Roi[2], Roi[3]), (0, 255, 0), 2)# 依次取出每行每列的H,S,V值放入容器中# Take out the H, S, V values of each row and each column in turn and put them into the containerfor i in range(Roi[0], Roi[2]):for j in range(Roi[1], Roi[3]):H.append(HSV[j, i][0])S.append(HSV[j, i][1])V.append(HSV[j, i][2])# 分别计算出H,S,V的最大最小# Calculate the maximum and minimum of H, S, and V respectivelyH_min = min(H); H_max = max(H)S_min = min(S); S_max = 253V_min = min(V); V_max = 255# HSV范围调整# HSV range adjustmentif H_max + 5 > 255: H_max = 255else: H_max += 5if H_min - 5 < 0: H_min = 0else: H_min -= 5if S_min - 20 < 0: S_min = 0else: S_min -= 20if V_min - 20 < 0: V_min = 0else: V_min -= 20lowerb = 'lowerb : (' + str(H_min) + ' ,' + str(S_min) + ' ,' + str(V_min) + ')'upperb = 'upperb : (' + str(H_max) + ' ,' + str(S_max) + ' ,' + str(V_max) + ')'txt1 = 'Learning ...'txt2 = 'OK !!!'if S_min < 5 or V_min < 5:cv.putText(img, txt1, (30, 50), cv.FONT_HERSHEY_SIMPLEX, 0.5, (0, 0, 255), 1)else:cv.putText(img, txt2, (30, 50), cv.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 1)cv.putText(img, lowerb, (150, 30), cv.FONT_HERSHEY_SIMPLEX, 0.5, (255, 0, 0), 1)cv.putText(img, upperb, (150, 50), cv.FONT_HERSHEY_SIMPLEX, 0.5, (255, 0, 0), 1)hsv_range = ((int(H_min), int(S_min), int(V_min)), (int(H_max), int(S_max), int(V_max)))return img, hsv_rangeclass simplePID:def __init__(self, kp, ki, kd):self.kp = kpself.ki = kiself.kd = kdself.targetpoint = 0self.intergral = 0self.derivative = 0self.prevError = 0def compute(self, target, current):error = target - currentself.intergral += errorself.derivative = error - self.prevErrorself.targetpoint = self.kp * error + self.ki * self.intergral + self.kd * self.derivativeself.prevError = errorreturn self.targetpointdef reset(self):self.targetpoint = 0self.intergral = 0self.derivative = 0self.prevError = 0class Tracker(object):'''追踪者模块,用于追踪指定目标Tracker module, used to track the specified target'''def __init__(self, tracker_type="BOOSTING"):'''初始化追踪器种类Initialize the type of tracker'''# 获得opencv版本# Get the opencv version(major_ver, minor_ver, subminor_ver) = (cv.__version__).split('.')self.tracker_type = tracker_typeself.isWorking = False# 构造追踪器# Construct trackerif int(major_ver) < 3: self.tracker = cv.Tracker_create(tracker_type)else:if tracker_type == 'BOOSTING': self.tracker = cv.TrackerBoosting_create()if tracker_type == 'MIL': self.tracker = cv.TrackerMIL_create()if tracker_type == 'KCF': self.tracker = cv.TrackerKCF_create()if tracker_type == 'TLD': self.tracker = cv.TrackerTLD_create()if tracker_type == 'MEDIANFLOW': self.tracker = cv.TrackerMedianFlow_create()if tracker_type == 'GOTURN': self.tracker = cv.TrackerGOTURN_create()if tracker_type == 'MOSSE': self.tracker = cv.TrackerMOSSE_create()if tracker_type == "CSRT": self.tracker = cv.TrackerCSRT_create()def initWorking(self, frame, box):'''Tracker work initialization 追踪器工作初始化frame:初始化追踪画面box:追踪的区域'''if not self.tracker: raise Exception("追踪器未初始化Tracker is not initialized")status = self.tracker.init(frame, box)#if not status: raise Exception("追踪器工作初始化失败Failed to initialize tracker job")self.coord = boxself.isWorking = Truedef track(self, frame):if self.isWorking:status, self.coord = self.tracker.update(frame)if status:p1 = (int(self.coord[0]), int(self.coord[1]))p2 = (int(self.coord[0] + self.coord[2]), int(self.coord[1] + self.coord[3]))cv.rectangle(frame, p1, p2, (255, 0, 0), 2, 1)return frame, p1, p2else:# 跟踪失败# Tracking failedcv.putText(frame, "Tracking failure detected", (100, 80), cv.FONT_HERSHEY_SIMPLEX, 0.75, (0, 0, 255), 2)return frame, (0, 0), (0, 0)else: return frame, (0, 0), (0, 0)
src/yahboom_esp32ai_car/yahboom_esp32ai_car/目录下新建colorHSV.py
#ros lib
import rclpy
from rclpy.node import Node
from std_msgs.msg import Bool
from geometry_msgs.msg import Twist
from sensor_msgs.msg import CompressedImage, LaserScan, Image
from yahboomcar_msgs.msg import Position
from cv_bridge import CvBridge
#common lib
import os
import threading
import math
from yahboom_esp32ai_car.astra_common import * #自定义函数
from yahboomcar_msgs.msg import Positionfrom rclpy.time import Time
import datetime
from ament_index_python.packages import get_package_share_directory #获取shares目录绝对路径print("import finish")
cv_edition = cv.__version__
print("cv_edition: ",cv_edition)
class Color_Identify(Node):def __init__(self,name):super().__init__(name)#create a publisher 创建发布者self.pub_position = self.create_publisher(Position,"/Current_point", 10)# 发布目标位置self.pub_cmdVel = self.create_publisher(Twist, '/cmd_vel', 10) #发布速度指令self.pub_img = self.create_publisher(Image,'/image_raw',500) #发布处理后的图self.bridge = CvBridge() #opencv 和ros图像转换工具#初始化变量self.index = 2self.Roi_init = () #roi区域坐标self.hsv_range = () #hsv 颜色范围self.end = 0 #fps 计算用self.circle = (0, 0, 0) #检测到目标圆信息(x,y,radius)self.point_pose = (0, 0, 0) #目标点位置 (x,y,z)self.dyn_update = Trueself.Start_state = Trueself.select_flags = Falseself.gTracker_state = Falseself.windows_name = 'frame'self.Track_state = 'identify' #跟踪状态,['init','identify','tracking']self.color = color_follow() #颜色跟踪类self.cols, self.rows = 0, 0 #鼠标选择区域坐标self.Mouse_XY = (0, 0) #鼠标点击坐标self.declare_param()#hsv 声明参数self.hsv_text = get_package_share_directory('yahboom_esp32ai_car')+'/resource/colorHSV.text'#self.timer = self.create_timer(0.001, self.on_timer)def declare_param(self):#HSVself.declare_parameter("Hmin",0)self.Hmin = self.get_parameter('Hmin').get_parameter_value().integer_valueself.declare_parameter("Smin",85)self.Smin = self.get_parameter('Smin').get_parameter_value().integer_valueself.declare_parameter("Vmin",126)self.Vmin = self.get_parameter('Vmin').get_parameter_value().integer_valueself.declare_parameter("Hmax",9)self.Hmax = self.get_parameter('Hmax').get_parameter_value().integer_valueself.declare_parameter("Smax",253)self.Smax = self.get_parameter('Smax').get_parameter_value().integer_valueself.declare_parameter("Vmax",253)self.Vmax = self.get_parameter('Vmax').get_parameter_value().integer_valueself.declare_parameter('refresh',False)self.refresh = self.get_parameter('refresh').get_parameter_value().bool_value#改成my_picturc里面使用即可# def on_timer(self):# ret, frame = self.capture.read()# action = cv.waitKey(10) & 0xFF# frame, binary =self.process(frame, action)# start = time.time()# fps = 1 / (start - self.end)# text = "FPS : " + str(int(fps))# self.end = start# cv.putText(frame, text, (30, 30), cv.FONT_HERSHEY_SIMPLEX, 0.6, (100, 200, 200), 1)# if len(binary) != 0: cv.imshow('frame', ManyImgs(1, ([frame, binary])))# else:cv.imshow('frame', frame)# msg = self.bridge.cv2_to_imgmsg(frame, "bgr8")# self.pub_img.publish(msg)# if action == ord('q') or action == 113:# self.capture.release()# cv.destroyAllWindows()# 主逻辑,执行颜色识别、跟踪逻辑 def process(self, rgb_img, action):self.get_param()rgb_img = cv.resize(rgb_img, (640, 480))binary = []if action != 255: self.get_logger().info(f'action={action}')if action == 32: self.Track_state = 'tracking' #空格键值elif action == ord('i') or action == ord('I'): self.Track_state = "identify"#识别elif action == ord('r') or action == ord('R'): self.Reset() #重置elif action == ord('q') or action == ord('Q'): self.cancel() #取消self.get_logger().info(f'Track_state={self.Track_state}')if self.Track_state == 'init':cv.namedWindow(self.windows_name, cv.WINDOW_AUTOSIZE)cv.setMouseCallback(self.windows_name, self.onMouse, 0)#鼠标回调函数if self.select_flags == True:#绘制roi区域cv.line(rgb_img, self.cols, self.rows, (255, 0, 0), 2)cv.rectangle(rgb_img, self.cols, self.rows, (0, 255, 0), 2)#画框if self.Roi_init[0] != self.Roi_init[2] and self.Roi_init[1] != self.Roi_init[3]:rgb_img, self.hsv_range = self.color.Roi_hsv(rgb_img, self.Roi_init)#提取roi区域的HSV范围self.gTracker_state = Trueself.dyn_update = Trueelse: self.Track_state = 'init'elif self.Track_state == "identify":if os.path.exists(self.hsv_text): self.hsv_range = read_HSV(self.hsv_text) # 从文件加载HSV范围else: self.Track_state = 'init'if self.Track_state != 'init':if len(self.hsv_range) != 0:rgb_img, binary, self.circle = self.color.object_follow(rgb_img, self.hsv_range)#颜色追踪if self.dyn_update == True:#参数更新write_HSV(self.hsv_text, self.hsv_range) # 保存HSV范围到文件self.Hmin = rclpy.parameter.Parameter('Hmin',rclpy.Parameter.Type.INTEGER,self.hsv_range[0][0])self.Smin = rclpy.parameter.Parameter('Smin',rclpy.Parameter.Type.INTEGER,self.hsv_range[0][1])self.Vmin = rclpy.parameter.Parameter('Vmin',rclpy.Parameter.Type.INTEGER,self.hsv_range[0][2])self.Hmax = rclpy.parameter.Parameter('Hmax',rclpy.Parameter.Type.INTEGER,self.hsv_range[1][0])self.Smax = rclpy.parameter.Parameter('Smax',rclpy.Parameter.Type.INTEGER,self.hsv_range[1][1])self.Vmax = rclpy.parameter.Parameter('Vmax',rclpy.Parameter.Type.INTEGER,self.hsv_range[1][2])all_new_parameters = [self.Hmin,self.Smin,self.Vmin,self.Hmax,self.Smax,self.Vmax]self.set_parameters(all_new_parameters)self.dyn_update = False if self.Track_state == 'tracking':self.Start_state = Trueif self.circle[2] != 0: threading.Thread(target=self.execute, args=(self.circle[0], self.circle[1], self.circle[2])).start()#启动控制线程,发布中心坐标if self.point_pose[0] != 0 and self.point_pose[1] != 0: threading.Thread(target=self.execute, args=(self.point_pose[0], self.point_pose[1], self.point_pose[2])).start()else:if self.Start_state == True:self.pub_cmdVel.publish(Twist())#停止self.Start_state = Falsereturn rgb_img, binary#发布目标位置def execute(self, x, y, z):position = Position()position.anglex = x * 1.0position.angley = y * 1.0position.distance = z * 1.0self.pub_position.publish(position)def get_param(self):#hsvself.Hmin = self.get_parameter('Hmin').get_parameter_value().integer_valueself.Smin = self.get_parameter('Smin').get_parameter_value().integer_valueself.Vmin = self.get_parameter('Vmin').get_parameter_value().integer_valueself.Hmax = self.get_parameter('Hmax').get_parameter_value().integer_valueself.Smax = self.get_parameter('Smax').get_parameter_value().integer_valueself.Vmax = self.get_parameter('Vmax').get_parameter_value().integer_valueself.refresh = self.get_parameter('refresh').get_parameter_value().bool_valuedef Reset(self):self.hsv_range = ()self.circle = (0, 0, 0)self.Mouse_XY = (0, 0)self.Track_state = 'init'for i in range(3): self.pub_position.publish(Position())print("succes!!!")def cancel(self):print("Shutting down this node.")cv.destroyAllWindows()#鼠标回调函数,除了param其他都是自动获取 def onMouse(self, event, x, y, flags, param):if event == 1:#左键点击self.Track_state = 'init'self.select_flags = Trueself.Mouse_XY = (x, y)if event == 4:#左键放开self.select_flags = Falseself.Track_state = 'mouse'if self.select_flags == True:self.cols = min(self.Mouse_XY[0], x), min(self.Mouse_XY[1], y)self.rows = max(self.Mouse_XY[0], x), max(self.Mouse_XY[1], y)self.Roi_init = (self.cols[0], self.cols[1], self.rows[0], self.rows[1])class MY_Picture(Node):def __init__(self, name):super().__init__(name)self.bridge = CvBridge()self.sub_img = self.create_subscription(CompressedImage, '/espRos/esp32camera', self.handleTopic, 1) #获取esp32传来的图像self.color_identify = Color_Identify("ColorIdentify")self.last_stamp = Noneself.new_seconds = 0self.fps_seconds = 1#图像回调 def handleTopic(self, msg):self.last_stamp = msg.header.stamp if self.last_stamp:total_secs = Time(nanoseconds=self.last_stamp.nanosec, seconds=self.last_stamp.sec).nanosecondsdelta = datetime.timedelta(seconds=total_secs * 1e-9)seconds = delta.total_seconds()*100if self.new_seconds != 0:self.fps_seconds = seconds - self.new_secondsself.new_seconds = seconds#保留这次的值start = time.time()frame = self.bridge.compressed_imgmsg_to_cv2(msg)#图像转换frame = cv.resize(frame, (640, 480))action = cv.waitKey(10) & 0xFFframe, binary =self.color_identify.process(frame, action)#执行处理逻辑if len(binary) != 0: cv.imshow('frame', ManyImgs(1, ([frame, binary])))else:cv.imshow('frame', frame)msg = self.bridge.cv2_to_imgmsg(frame, "bgr8")self.color_identify.pub_img.publish(msg) end = time.time()fps = 1/((end - start)+self.fps_seconds) text = "FPS : " + str(int(fps))cv.putText(frame, text, (10,20), cv.FONT_HERSHEY_SIMPLEX, 0.8, (0,255,255), 2)if len(binary) != 0: cv.imshow('frame', ManyImgs(1, ([frame, binary])))else:cv.imshow('frame', frame)if action == ord('q') or action == 113:cv.destroyAllWindows()#rclpy.spin(self.QRdetect)def main():rclpy.init()esp_img = MY_Picture("My_Picture")print("start it")try:rclpy.spin(esp_img)except KeyboardInterrupt:passfinally:esp_img.destroy_node()rclpy.shutdown()主要功能模块说明:
-
Color_Identify 类
-
实现颜色识别与跟踪的核心逻辑
-
支持动态ROI选择、HSV参数调整
-
通过ROS参数服务器管理HSV范围
-
提供目标位置发布和运动控制功能
-
-
MY_Picture 类
-
主图像处理节点
-
订阅摄像头图像话题
-
集成颜色识别功能
-
实现FPS计算与图像显示
-
-
关键技术点
-
OpenCV颜色空间转换(BGR->HSV)
-
形态学操作(开闭运算去噪)
-
轮廓检测与最小外接圆计算
-
ROS2动态参数管理
-
多线程控制指令发布
-
-
工作流程
-
初始化节点和订阅者/发布者
-
接收摄像头图像
-
颜色识别处理(支持ROI选择)
-
目标位置计算
-
控制指令生成与发布
-
实时图像显示与状态反馈
-
#ros lib
import rclpy
from rclpy.node import Node
from std_msgs.msg import Bool
from geometry_msgs.msg import Twist
from sensor_msgs.msg import CompressedImage, LaserScan, Image
from yahboomcar_msgs.msg import Position
from std_msgs.msg import Int32, Bool,UInt16
from cv_bridge import CvBridge
#common lib
import os
import threading
import math
import time
from yahboom_esp32ai_car.astra_common import *
from yahboomcar_msgs.msg import Positionprint("import done")class color_Tracker(Node):def __init__(self,name):super().__init__(name)#create the publisherself.pub_cmdVel = self.create_publisher(Twist,'/cmd_vel',10)#速度控制self.pub_Servo1 = self.create_publisher(Int32,"servo_s1" , 10)#舵机1角度控制self.pub_Servo2 = self.create_publisher(Int32,"servo_s2" , 10)#舵机2角度控制#create the subscriberself.sub_depth = self.create_subscription(Image,"/image_raw", self.depth_img_Callback, 1)#图像self.sub_JoyState = self.create_subscription(Bool,'/JoyState', self.JoyStateCallback,1)self.sub_position = self.create_subscription(Position,"/Current_point",self.positionCallback,1)#目标位置self.bridge = CvBridge()#初始化变量self.minDist = 1500 #最小追踪距离(mm)self.Center_x = 0 #目标中心点x坐标self.Center_y = 0 #目标中心点y坐标self.Center_r = 0 #目标半径self.Center_prevx = 0 #前一帧目标x坐标self.Center_prevr = 0 #前一帧目标半径self.prev_time = 0 #时间戳self.prev_dist = 0self.prev_angular = 0self.Joy_active = Falseself.Robot_Run = False #运行状态self.img_flip = False #图像翻转表示self.dist = [] self.encoding = ['8UC3']self.linear_PID = (8.0, 0.0, 1.0) #线性pid参数(kp,ki,kd)self.angular_PID = (0.5, 0.0, 2.0) #角度pid参数self.scale = 1000 #pid缩放系数self.PID_init()self.PWMServo_X = 0 #舵机1当前角度self.PWMServo_Y = 10 #舵机2当前角度self.s1_init_angle = Int32() #舵机1 初始角度self.s1_init_angle.data = self.PWMServo_Xself.s2_init_angle = Int32() #舵机2 初始角度self.s2_init_angle.data = self.PWMServo_Yself.declare_param() #声明参数#确保角度正常处于中间for i in range(10):self.pub_Servo1.publish(self.s1_init_angle)self.pub_Servo2.publish(self.s2_init_angle)time.sleep(0.1) #发布间隔0.1秒print("init done")def declare_param(self):self.declare_parameter("linear_Kp",20.0)self.linear_Kp = self.get_parameter('linear_Kp').get_parameter_value().double_valueself.declare_parameter("linear_Ki",0.0)self.linear_Ki = self.get_parameter('linear_Ki').get_parameter_value().double_valueself.declare_parameter("linear_Kd",2.0)self.linear_Kd = self.get_parameter('linear_Kd').get_parameter_value().double_valueself.declare_parameter("angular_Kp",0.5)self.angular_Kp = self.get_parameter('angular_Kp').get_parameter_value().double_valueself.declare_parameter("angular_Ki",0.0)self.angular_Ki = self.get_parameter('angular_Ki').get_parameter_value().double_valueself.declare_parameter("angular_Kd",2.0)self.angular_Kd = self.get_parameter('angular_Kd').get_parameter_value().double_valueself.declare_parameter("scale",1000)self.scale = self.get_parameter('scale').get_parameter_value().integer_valueself.declare_parameter("minDistance",1.0)self.minDistance = self.get_parameter('minDistance').get_parameter_value().double_valueself.declare_parameter('angular_speed_limit',5.0)self.angular_speed_limit = self.get_parameter('angular_speed_limit').get_parameter_value().double_valueself.pub_Servo1.publish(self.s1_init_angle)self.pub_Servo2.publish(self.s2_init_angle)#从参数服务器获取最新参数值def get_param(self):self.linear_Kp = self.get_parameter('linear_Kp').get_parameter_value().double_valueself.linear_Ki = self.get_parameter('linear_Ki').get_parameter_value().double_valueself.linear_Kd = self.get_parameter('linear_Kd').get_parameter_value().double_valueself.angular_Kp = self.get_parameter('angular_Kp').get_parameter_value().double_valueself.angular_Ki = self.get_parameter('angular_Ki').get_parameter_value().double_valueself.angular_Kd = self.get_parameter('angular_Kd').get_parameter_value().double_valueself.scale = self.get_parameter('scale').get_parameter_value().integer_valueself.minDistance = self.get_parameter('minDistance').get_parameter_value().double_valueself.linear_PID = (self.linear_Kp, self.linear_Ki, self.linear_Kd)self.angular_PID = (self.angular_Kp, self.angular_Ki, self.angular_Kd)self.minDist = self.minDistance * 1000 #转换最小距离单位(米->毫米)def PID_init(self):# self.linear_pid = simplePID(self.linear_PID[0] / 1000.0, self.linear_PID[1] / 1000.0, self.linear_PID[2] / 1000.0)#self.angular_pid = simplePID(self.angular_PID[0] / 100.0, self.angular_PID[1] / 100.0, self.angular_PID[2] / 100.0)# PID参数除以scale进行归一化处理self.linear_pid = simplePID([0, 0],#目标值占位符[self.linear_PID[0] / float(self.scale), self.linear_PID[0] / float(self.scale)],[self.linear_PID[1] / float(self.scale), self.linear_PID[1] / float(self.scale)],[self.linear_PID[2] / float(self.scale), self.linear_PID[2] / float(self.scale)])def depth_img_Callback(self, msg):#图像回调if not isinstance(msg, Image): returndepthFrame = self.bridge.imgmsg_to_cv2(msg, desired_encoding=self.encoding[0])#图像转换self.action = cv.waitKey(1) #获取键盘输入if self.Center_r != 0:#检测到有效目标(半径!=0)now_time = time.time()if now_time - self.prev_time > 5:#超过5秒未更新则重置if self.Center_prevx == self.Center_x and self.Center_prevr == self.Center_r: self.Center_r = 0self.prev_time = now_timedistance = [0, 0, 0, 0, 0]#距离数据 5点平均if 0 < int(self.Center_y - 3) and int(self.Center_y + 3) < 480 and 0 < int(self.Center_x - 3) and int(self.Center_x + 3) < 640:#检测目标区域是否在图像范围内print("depthFrame: ", len(depthFrame), len(depthFrame[0])) #在目标周围5个点采样距离值distance[0] = depthFrame[int(self.Center_y - 3)][int(self.Center_x - 3)]distance[1] = depthFrame[int(self.Center_y + 3)][int(self.Center_x - 3)]distance[2] = depthFrame[int(self.Center_y - 3)][int(self.Center_x + 3)]distance[3] = depthFrame[int(self.Center_y + 3)][int(self.Center_x + 3)]distance[4] = depthFrame[int(self.Center_y)][int(self.Center_x)]distance_ = 1000.0 #默认值num_depth_points = 5for i in range(5):if 40 < distance[i].all() < 80000: distance_ += distance[i] #有效距离过滤else: num_depth_points -= 1 #无效点计数-1if num_depth_points == 0: distance_ = self.minDist #没有有效点,使用最小近距离else: distance_ /= num_depth_points #计算平均距离#print("Center_x: {}, Center_y: {}, distance_: {}".format(self.Center_x, self.Center_y, distance_))self.execute(self.Center_x, self.Center_y)#执行舵机控制self.Center_prevx = self.Center_xself.Center_prevr = self.Center_relse: #无有效目标停止if self.Robot_Run ==True:self.pub_cmdVel.publish(Twist()) self.Robot_Run = Falseif self.action == ord('q') or self.action == 113: self.cleanup()def JoyStateCallback(self, msg):#手柄if not isinstance(msg, Bool): returnself.Joy_active = msg.dataself.pub_cmdVel.publish(Twist())def positionCallback(self, msg):#目标位置回调if not isinstance(msg, Position): returnself.get_logger().info(f'positionCallback msg:{str(msg)}')self.Center_x = msg.anglexself.Center_y = msg.angleyself.Center_r = msg.distancedef cleanup(self):self.pub_cmdVel.publish(Twist())print ("Shutting down this node.")cv.destroyAllWindows()#舵机控制 def execute(self, point_x, point_y):#通过PID计算舵机调整量(参数是计算目标位置与图像中心的偏差,图像中心坐标(320,240))[x_Pid, y_Pid] = self.linear_pid .update([point_x - 320, point_y - 240])if self.img_flip == True:#根据图像翻转标识调整方向self.PWMServo_X += x_Pidself.PWMServo_Y += y_Pidelse:self.PWMServo_X -= x_Pidself.PWMServo_Y += y_Pid#角度限制(保护舵机)if self.PWMServo_X >= 45:self.PWMServo_X = 45elif self.PWMServo_X <= -45:self.PWMServo_X = -45if self.PWMServo_Y >= 20:self.PWMServo_Y = 20elif self.PWMServo_Y <= -90:self.PWMServo_Y = -90#rospy.loginfo("target_servox: {}, target_servoy: {}".format(self.target_servox, self.target_servoy))print("servo1",self.PWMServo_X) servo1_angle = Int32()servo1_angle.data = int(self.PWMServo_X)servo2_angle = Int32()servo2_angle.data = int(self.PWMServo_Y)self.pub_Servo1.publish(servo1_angle)self.pub_Servo2.publish(servo2_angle)#PID控制器
class simplePID:'''very simple discrete PID controller'''def __init__(self, target, P, I, D):#初始化pid'''Create a discrete PID controllereach of the parameters may be a vector if they have the same lengthArgs:target (double) -- the target value(s)P, I, D (double)-- the PID parameter'''# check if parameter shapes are compatabile.if (not (np.size(P) == np.size(I) == np.size(D)) or ((np.size(target) == 1) and np.size(P) != 1) or (np.size(target) != 1 and (np.size(P) != np.size(target) and (np.size(P) != 1)))):raise TypeError('input parameters shape is not compatable')# rospy.loginfo('P:{}, I:{}, D:{}'.format(P, I, D))self.Kp = np.array(P)self.Ki = np.array(I)self.Kd = np.array(D)self.last_error = 0self.integrator = 0self.timeOfLastCall = Noneself.setPoint = np.array(target)self.integrator_max = float('inf')def update(self, current_value):'''Updates the PID controller. 更新PID控制器状态并返回控制量Args:current_value (double): vector/number of same legth as the target given in the constructorReturns:controll signal (double): vector of same length as the target'''current_value = np.array(current_value)if (np.size(current_value) != np.size(self.setPoint)):raise TypeError('current_value and target do not have the same shape')if (self.timeOfLastCall is None):# the PID was called for the first time. we don't know the deltaT yet# no controll signal is appliedself.timeOfLastCall = time.perf_counter()return np.zeros(np.size(current_value))error = self.setPoint - current_valueP = errorcurrentTime = time.perf_counter()deltaT = (currentTime - self.timeOfLastCall)# integral of the error is current error * time since last update 积分项计算self.integrator = self.integrator + (error * deltaT)I = self.integrator# derivative is difference in error / time since last update 微分项计算D = (error - self.last_error) / deltaTself.last_error = errorself.timeOfLastCall = currentTime# return controll signal 输出控制量return self.Kp * P + self.Ki * I + self.Kd * Ddef main():rclpy.init()color_tracker = color_Tracker("ColorTracker")print("start it")rclpy.spin(color_tracker)
-
控制流程
-
订阅颜色识别节点发布的
/Current_point目标位置 -
通过深度图像计算目标距离
-
使用PID控制器计算舵机调整量
-
发布舵机控制指令实现云台跟踪
-
-
关键技术点
-
深度数据处理:在目标区域采样多点深度值进行平均
-
抗抖动设计:5秒无更新自动重置目标状态
-
舵机平滑控制:PID输出限幅防止突变
-
动态参数配置:通过ROS参数服务器实时调整PID参数
-
-
colorHSV.py
主要是完成图像处理,计算出被追踪物体的中心坐标。
-
colorTracker.py
主要是根据被追踪物体的中心坐标和深度信息,计算出舵机运动角度数据给底盘。
程序说明
MicroROS机器人颜色追踪,具备可以随时识别多种颜色,并自主储存当前识别的颜色,控制小车云台追随检测识别的颜色。
MicroROS机器人的颜色追踪还可以实现HSV实时调控的功能,通过调节HSV的高低阈值,过滤掉干扰的颜色,使得方块在复杂的环境中能够非常理想的被识别出来,如果在取色中效果不理想的话,这个时候需要将小车移动到不同环境下校准一下,以达到可以在复杂环境中,识别我们所需的颜色。
运行:
#小车代理 sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:humble udp4 --port 8090 -v4 #摄像头代理(先启动代理再打开小车开关) docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:humble udp4 --port 9999 -v4
#启动舵机校准程序#当舵机的角度不处于中间的时候,需要执行以下命令 ros2 run yahboom_esp32_mediapipe control_servo 启动颜色追踪程序 ros2 run yahboom_esp32ai_car colorHSV
bohu@bohu-TM1701:~/yahboomcar/yahboomcar_ws$ ros2 run yahboom_esp32ai_car colorHSV
import finish
cv_edition: 4.11.0
start it
[INFO] [1738674982.309149874] [ColorIdentify]: Track_state=identify
[INFO] [1738674982.524295927] [ColorIdentify]: Track_state=identify
[INFO] [1738674982.803851561] [ColorIdentify]: Track_state=identify
[INFO] [1738674982.973336708] [ColorIdentify]: Track_state=identify
...
[INFO] [1738675048.670016124] [ColorIdentify]: action=114
succes!!!
[INFO] [1738675048.673837152] [ColorIdentify]: Track_state=init
[INFO] [1738675048.985173614] [ColorIdentify]: Track_state=init
[INFO] [1738675053.159352295] [ColorIdentify]: Track_state=mouse
[INFO] [1738675053.755473605] [ColorIdentify]: Track_state=mouse
[INFO] [1738675054.460844705] [ColorIdentify]: Track_state=mouse
[INFO] [1738675054.804728880] [ColorIdentify]: Track_state=mouse
[INFO] [1738675055.570826483] [ColorIdentify]: Track_state=mouse
[INFO] [1738675251.874084436] [ColorIdentify]: action=32
[INFO] [1738675251.875798862] [ColorIdentify]: Track_state=tracking
[INFO] [1738675252.089742888] [ColorIdentify]: Track_state=tracking
[INFO] [1738675252.282038043] [ColorIdentify]: Track_state=tracking
[INFO] [1738675252.507568662] [ColorIdentify]: Track_state=tracking
[INFO] [1738675252.734285724] [ColorIdentify]: Track_state=tracking
[INFO] [1738675252.956037454] [ColorIdentify]: Track_state=tracking
[INFO] [1738675253.283054540] [ColorIdentify]: Track_state=tracking
程序启动后,会出现以下画面,

然后按下键盘上的r/R键进入选色模式,用鼠标框出一片区域(该区域只能有一中颜色),

选完后的效果

然后,按下空格键进入追踪模式,缓慢移动物体,能看到机器人云台会追踪色块运动。
遇到的问题
OpenCV中waitKey()函数失效问题
就是获取不到按键,导致没法切换。我问了下deepseek.

真的很棒,OpenCV的GUI窗口没有被聚焦。
waitKey() 函数只有在窗口获得焦点的时候才有效,如果焦点在电脑其他窗口上,OpenCV是不会接受按键事件的。鼠标点击GUI窗口就可以获得焦点。
对比下deepseek.我真的真的被自己蠢哭了。亚博官网的代码可能有bug,需要自己去验证下。
另外,测试过程中不能快了,速度快了摄像头跟不上移动就丢了,得慢慢移动才有效果。
以上。
相关文章:
亚博microros小车-原生ubuntu支持系列:21 颜色追踪
背景知识 这个测试例子用到了很多opencv的函数,举个例子。 #cv2.findContours函数来找到二值图像中的轮廓。#参数:#参数1:输 入的二值图像。通常是经过阈值处理后的图像,例如在颜色过滤之后生成的掩码。#参数2(cv2.RETR_EXTERNA…...

GESP6级语法知识(六):(动态规划算法(六)多重背包)
多重背包(二维数组) #include <iostream> using namespace std; #define N 1005 int Asd[N][N]; //Asd[i][j]表示前 i 个物品,背包容量是 j 的情况下的最大价值。 int Value[N], Vol[N], S[N];int main() {int n, Volume;cin &g…...

MySQL 事务实现原理( 详解 )
MySQL 主要是通过: 锁、Redo Log、Undo Log、MVCC来实现事务 事务的隔离性利用锁机制实现 原子性、一致性和持久性由事务的 redo 日志和undo 日志来保证。 Redo Log(重做日志):记录事务对数据库的所有修改,在崩溃时恢复未提交的更改,保证事务…...

AI协助探索AI新构型自动化创新的技术实现
一、AI自进化架构的核心范式 1. 元代码生成与模块化重构 - 代码级自编程:基于神经架构搜索的强化学习框架,AI可通过生成元代码模板(框架的抽象层定义)自动组合功能模块。例如,使用注意力机制作为原子单元ÿ…...

九. Redis 持久化-RDB(详细讲解说明,一个配置一个说明分析,步步讲解到位)
九. Redis 持久化-RDB(详细讲解说明,一个配置一个说明分析,步步讲解到位) 文章目录 九. Redis 持久化-RDB(详细讲解说明,一个配置一个说明分析,步步讲解到位)1. RDB 概述2. RDB 持久化执行流程3. RDB 的详细配置4. RDB 备份&恢…...

mac连接linux服务器
1、mac连接linux服务器 # ssh -p 22 root192.168.1.152、mac指定密码连接linux服务器 (1) 先安装sshpass,下载后解压执行 ./configure && make && makeinstall https://sourceforge.net/projects/sshpass/ (2) 连接linux # sshpass -p \/\\\[\!\\wen12\$ s…...

oracle: 表分区>>范围分区,列表分区,散列分区/哈希分区,间隔分区,参考分区,组合分区,子分区/复合分区/组合分区
分区表 是将一个逻辑上的大表按照特定的规则划分为多个物理上的子表,这些子表称为分区。 分区可以基于不同的维度,如时间、数值范围、字符串值等,将数据分散存储在不同的分区 中,以提高数据管理的效率和查询性能,同时…...

使用Pygame制作“走迷宫”游戏
1. 前言 迷宫游戏是最经典的 2D 游戏类型之一:在一个由墙壁和通道构成的地图里,玩家需要绕过障碍、寻找通路,最终抵达出口。它不但简单易实现,又兼具可玩性,还能在此基础上添加怪物、道具、机关等元素。本篇文章将展示…...

AJAX案例——图片上传个人信息操作
黑马程序员视频地址: AJAX-Day02-11.图片上传https://www.bilibili.com/video/BV1MN411y7pw?vd_source0a2d366696f87e241adc64419bf12cab&spm_id_from333.788.videopod.episodes&p26 图片上传 <!-- 文件选择元素 --><input type"file"…...

Day35-【13003】短文,什么是双端队列?栈和队列的互相模拟,以及解决队列模拟栈时出栈时间开销大的方法
文章目录 第三节进一步讨论栈和队列双端队列栈和队列的相互模拟使用栈来模拟队列类型定义入队出队判空,判满 使用队列来模拟栈类型定义初始化清空操作判空,判满栈长度输出入栈出栈避免出栈时间开销大的方法 第三节进一步讨论栈和队列 双端队列 假设你芷…...

力扣 55. 跳跃游戏
🔗 https://leetcode.cn/problems/jump-game 题目 给一个数组 nums,最开始在 index 0,每次可以跳跃的区间是 0-nums[i]判断是否可以跳到数组末尾 思路 题解是用贪心,实际上模拟也可以过遍历可以到达的下标,判断其可…...

深入剖析 HTML5 新特性:语义化标签和表单控件完全指南
系列文章目录 01-从零开始学 HTML:构建网页的基本框架与技巧 02-HTML常见文本标签解析:从基础到进阶的全面指南 03-HTML从入门到精通:链接与图像标签全解析 04-HTML 列表标签全解析:无序与有序列表的深度应用 05-HTML表格标签全面…...

本地快速部署DeepSeek-R1模型——2025新年贺岁
一晃年初六了,春节长假余额马上归零了。今天下午在我的电脑上成功部署了DeepSeek-R1模型,抽个时间和大家简单分享一下过程: 概述 DeepSeek模型 是一家由中国知名量化私募巨头幻方量化创立的人工智能公司,致力于开发高效、高性能…...

MVC 文件夹:架构之美与实际应用
MVC 文件夹:架构之美与实际应用 引言 MVC(Model-View-Controller)是一种设计模式,它将应用程序分为三个核心组件:模型(Model)、视图(View)和控制器(Controller)。这种架构模式不仅提高了代码的可维护性和可扩展性,而且使得开发流程更加清晰。本文将深入探讨MVC文…...

Redis --- 秒杀优化方案(阻塞队列+基于Stream流的消息队列)
下面是我们的秒杀流程: 对于正常的秒杀处理,我们需要多次查询数据库,会给数据库造成相当大的压力,这个时候我们需要加入缓存,进而缓解数据库压力。 在上面的图示中,我们可以将一条流水线的任务拆成两条流水…...

如何确认设备文件 /dev/fb0 对应的帧缓冲设备是开发板上的LCD屏?如何查看LCD屏的属性信息?
要判断 /dev/fb0 是否对应的是 LCD 屏幕,可以通过以下几种方法: 方法 1:使用 fbset 命令查看帧缓冲设备的属性信息 Linux 的 帧缓冲设备(Framebuffer) 通常在 /dev/fbX 下,/dev/fb0 一般是主屏幕ÿ…...

C++多线程编程——基于策略模式、单例模式和简单工厂模式的可扩展智能析构线程
1. thread对象的析构问题 在 C 多线程标准库中,创建 thread 对象后,必须在对象析构前决定是 detach 还是 join。若在 thread 对象销毁时仍未做出决策,程序将会终止。 然而,在创建 thread 对象后、调用 join 前的代码中ÿ…...

AI与SEO关键词的完美结合如何提升网站流量与排名策略
内容概要 在当今数字营销环境中,内容的成功不仅依赖于高质量的创作,还包括高效的关键词策略。AI与SEO关键词的结合,正是这一趋势的重要体现。 AI技术在SEO中的重要性 在数字营销领域,AI技术的引入为SEO策略带来了前所未有的变革。…...

保姆级教程Docker部署Kafka官方镜像
目录 一、安装Docker及可视化工具 二、单节点部署 1、创建挂载目录 2、运行Kafka容器 3、Compose运行Kafka容器 4、查看Kafka运行状态 三、集群部署 在Kafka2.8版本之前,Kafka是强依赖于Zookeeper中间件的,这本身就很不合理,中间件依赖…...

解析PHP文件路径相关常量
PHP文件路径相关常量包括以下几个常量: __FILE__:表示当前文件的绝对路径,包括文件名。 __DIR__:表示当前文件所在的目录的绝对路径,不包括文件名。 dirname(__FILE__):等同于__DIR__,表示当前…...

内存分配函数malloc kmalloc vmalloc
内存分配函数malloc kmalloc vmalloc malloc实现步骤: 1)请求大小调整:首先,malloc 需要调整用户请求的大小,以适应内部数据结构(例如,可能需要存储额外的元数据)。通常,这包括对齐调整,确保分配的内存地址满足特定硬件要求(如对齐到8字节或16字节边界)。 2)空闲…...

synchronized 学习
学习源: https://www.bilibili.com/video/BV1aJ411V763?spm_id_from333.788.videopod.episodes&vd_source32e1c41a9370911ab06d12fbc36c4ebc 1.应用场景 不超卖,也要考虑性能问题(场景) 2.常见面试问题: sync出…...
linux之kylin系统nginx的安装
一、nginx的作用 1.可做高性能的web服务器 直接处理静态资源(HTML/CSS/图片等),响应速度远超传统服务器类似apache支持高并发连接 2.反向代理服务器 隐藏后端服务器IP地址,提高安全性 3.负载均衡服务器 支持多种策略分发流量…...
【入坑系列】TiDB 强制索引在不同库下不生效问题
文章目录 背景SQL 优化情况线上SQL运行情况分析怀疑1:执行计划绑定问题?尝试:SHOW WARNINGS 查看警告探索 TiDB 的 USE_INDEX 写法Hint 不生效问题排查解决参考背景 项目中使用 TiDB 数据库,并对 SQL 进行优化了,添加了强制索引。 UAT 环境已经生效,但 PROD 环境强制索…...

电脑插入多块移动硬盘后经常出现卡顿和蓝屏
当电脑在插入多块移动硬盘后频繁出现卡顿和蓝屏问题时,可能涉及硬件资源冲突、驱动兼容性、供电不足或系统设置等多方面原因。以下是逐步排查和解决方案: 1. 检查电源供电问题 问题原因:多块移动硬盘同时运行可能导致USB接口供电不足&#x…...
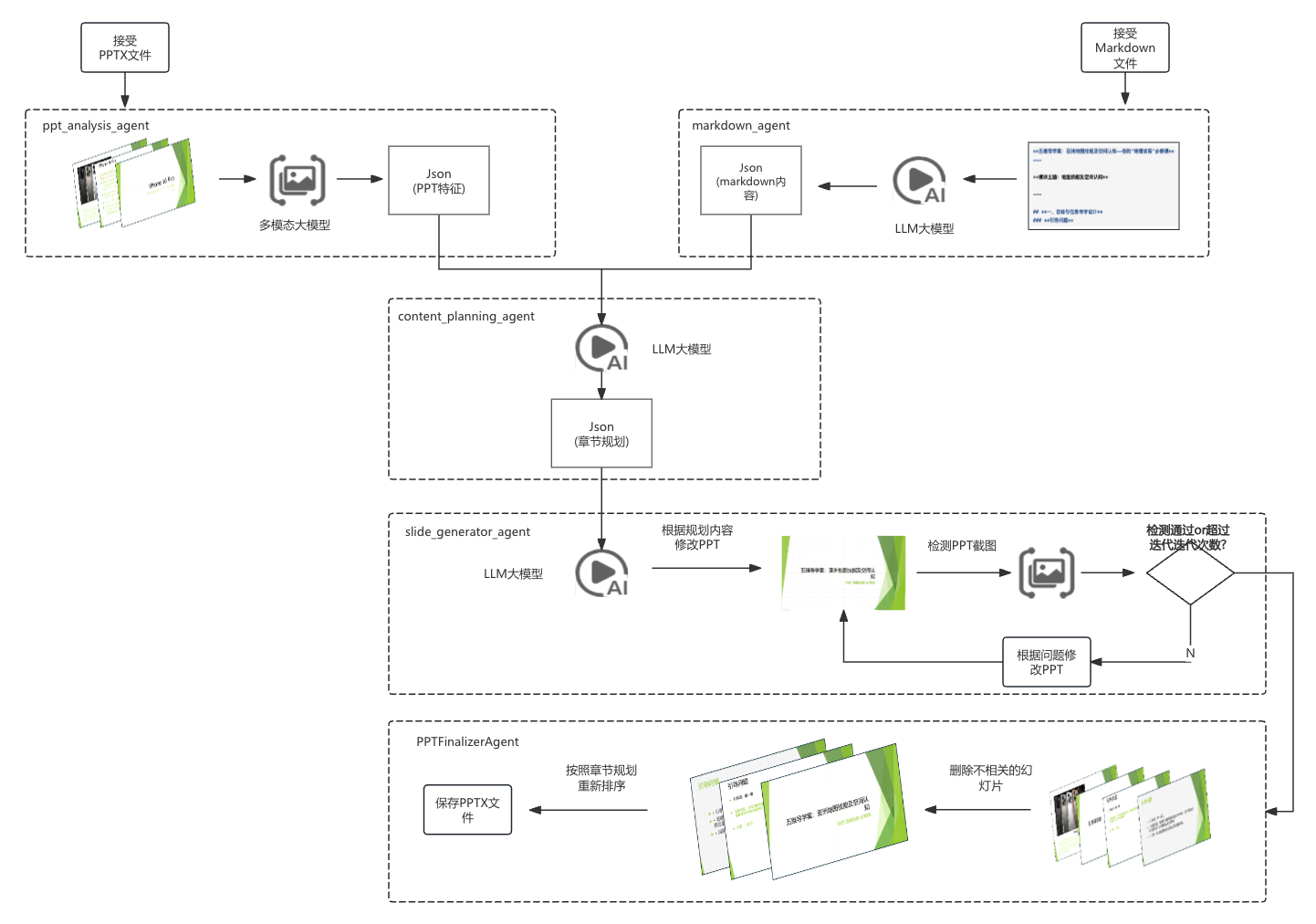
【项目实战】通过多模态+LangGraph实现PPT生成助手
PPT自动生成系统 基于LangGraph的PPT自动生成系统,可以将Markdown文档自动转换为PPT演示文稿。 功能特点 Markdown解析:自动解析Markdown文档结构PPT模板分析:分析PPT模板的布局和风格智能布局决策:匹配内容与合适的PPT布局自动…...
【从零开始学习JVM | 第四篇】类加载器和双亲委派机制(高频面试题)
前言: 双亲委派机制对于面试这块来说非常重要,在实际开发中也是经常遇见需要打破双亲委派的需求,今天我们一起来探索一下什么是双亲委派机制,在此之前我们先介绍一下类的加载器。 目录 编辑 前言: 类加载器 1. …...

手机平板能效生态设计指令EU 2023/1670标准解读
手机平板能效生态设计指令EU 2023/1670标准解读 以下是针对欧盟《手机和平板电脑生态设计法规》(EU) 2023/1670 的核心解读,综合法规核心要求、最新修正及企业合规要点: 一、法规背景与目标 生效与强制时间 发布于2023年8月31日(OJ公报&…...

wpf在image控件上快速显示内存图像
wpf在image控件上快速显示内存图像https://www.cnblogs.com/haodafeng/p/10431387.html 如果你在寻找能够快速在image控件刷新大图像(比如分辨率3000*3000的图像)的办法,尤其是想把内存中的裸数据(只有图像的数据,不包…...

什么是VR全景技术
VR全景技术,全称为虚拟现实全景技术,是通过计算机图像模拟生成三维空间中的虚拟世界,使用户能够在该虚拟世界中进行全方位、无死角的观察和交互的技术。VR全景技术模拟人在真实空间中的视觉体验,结合图文、3D、音视频等多媒体元素…...