可视化相机pose colmap形式的相机内参外参
目录
内参外参转换
可视化相机pose colmap形式的相机内参外参
内参外参转换
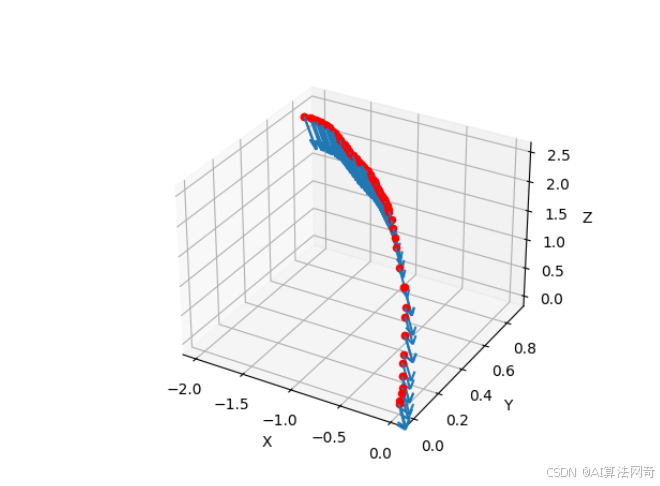
def visualize_cameras(cameras, images):fig = plt.figure()ax = fig.add_subplot(111, projection='3d')for image_id, image_data in images.items():qvec = image_data['qvec']tvec = image_data['tvec']# Convert quaternion to rotation matrixrotation = R.from_quat(qvec).as_matrix()# Plot camera positionax.scatter(tvec[0], tvec[1], tvec[2], c='r', marker='o')# Plot camera orientationcamera_direction = rotation @ np.array([0, 0, 1])ax.quiver(tvec[0], tvec[1], tvec[2], camera_direction[0], camera_direction[1], camera_direction[2], length=0.5, normalize=True)ax.set_xlabel('X')ax.set_ylabel('Y')ax.set_zlabel('Z')plt.show()这段代码用于在3D坐标系中可视化相机的位置和朝向。以下是逐行解释:
-
提取参数:
qvec = image_data['qvec'] # 相机的旋转四元数 (w, x, y, z 或 x, y, z, w,需确认顺序) tvec = image_data['tvec'] # 相机的平移向量 (x, y, z 坐标)
-
四元数转旋转矩阵:
rotation = R.from_quat(qvec).as_matrix() # 将四元数转换为3x3旋转矩阵-
假设
R来自scipy.spatial.transform.Rotation。 -
需确认
qvec的顺序是否为库预期的格式(通常R.from_quat接受(x, y, z, w))。
-
-
绘制相机位置:
ax.scatter(tvec[0], tvec[1], tvec[2], c='r', marker='o') # 在3D图中用红点标记相机位置 -
计算并绘制相机朝向:
camera_direction = rotation @ np.array([0, 0, 1]) # 旋转矩阵乘以Z轴单位向量,得到相机在世界坐标系中的朝向 ax.quiver(tvec[0], tvec[1], tvec[2], camera_direction[0], camera_direction[1], camera_direction[2], length=0.5, normalize=True)-
原理:相机坐标系中默认朝向为Z轴正方向(通常指向拍摄方向),通过旋转矩阵将其转换到世界坐标系。
-
箭头参数:
-
起点为相机位置
(tvec[0], tvec[1], tvec[2])。 -
方向向量为
camera_direction。 -
length=0.5控制箭头显示长度(实际长度可能因归一化调整)。 -
normalize=True确保箭头方向正确,长度统一。
-
-
注意事项:
-
四元数顺序:确认
qvec是否与R.from_quat兼容(SciPy需(x, y, z, w))。 -
坐标系定义:假设相机朝向为Z轴正方向,若实际定义相反(如OpenGL使用-Z),需调整为
[0, 0, -1]。 -
3D绘图设置:确保
ax是3D轴(例如通过fig.add_subplot(111, projection='3d')创建)。
效果:在3D图中,红色圆点表示相机位置,箭头指示其拍摄方向。
可视化相机pose colmap形式的相机内参外参
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
from scipy.spatial.transform import Rotation as R
def read_cameras(file_path):cameras = {}with open(file_path, 'r') as file:for line in file:if line[0] == '#':continueparts = line.strip().split()camera_id = int(parts[0])model = parts[1]width = int(parts[2])height = int(parts[3])params = np.array([float(p) for p in parts[4:]])cameras[camera_id] = {'model': model,'width': width,'height': height,'params': params}return camerasdef read_images(file_path):images = {}with open(file_path, 'r') as file:for line in file:if line[0] == '#':continueparts = line.strip().split()if len(parts) == 15:continueimage_id = int(parts[0])qvec = np.array([float(p) for p in parts[1:5]])tvec = np.array([float(p) for p in parts[5:8]])camera_id = int(parts[8])file_name = parts[9]images[image_id] = {'qvec': qvec,'tvec': tvec,'camera_id': camera_id,'file_name': file_name}return imagesdef visualize_cameras(cameras, images):fig = plt.figure()ax = fig.add_subplot(111, projection='3d')for image_id, image_data in images.items():qvec = image_data['qvec']tvec = image_data['tvec']# Convert quaternion to rotation matrixrotation = R.from_quat(qvec).as_matrix()# Plot camera positionax.scatter(tvec[0], tvec[1], tvec[2], c='r', marker='o')# Plot camera orientationcamera_direction = rotation @ np.array([0, 0, 1])ax.quiver(tvec[0], tvec[1], tvec[2], camera_direction[0], camera_direction[1], camera_direction[2], length=0.5, normalize=True)ax.set_xlabel('X')ax.set_ylabel('Y')ax.set_zlabel('Z')plt.show()# 示例使用
cameras = read_cameras('./cameras.txt')
images = read_images('./images.txt')
visualize_cameras(cameras, images)相关文章:
可视化相机pose colmap形式的相机内参外参
目录 内参外参转换 可视化相机pose colmap形式的相机内参外参 内参外参转换 def visualize_cameras(cameras, images):fig plt.figure()ax fig.add_subplot(111, projection3d)for image_id, image_data in images.items():qvec image_data[qvec]tvec image_data[tvec]#…...

数据结构 树2
文章目录 前言 一,二叉搜索树的高度 二,广度优先VS深度优先 三,广度优先的代码实现 四,深度优先代码实现 五,判断是否为二叉搜索树 六,删除一个节点 七,二叉收索树的中序后续节点 总结 …...

GB/T 44721-2024 与 L3 自动驾驶:自动驾驶新时代的基石与指引
1.前言 在智能网联汽车飞速发展的当下,自动驾驶技术成为了行业变革的核心驱动力。从最初的辅助驾驶功能,到如今不断迈向高度自动化的征程,每一步都凝聚着技术的创新与突破。而在这一进程中,标准的制定与完善对于自动驾驶技术的规…...

AURIX TC275学习笔记3 官方例程 (UART LED WDT)
文章目录 参考资料1. ASCLIN_UART_12. GPIO_LED_Button_13. WDT (Watch Dog Timer) 参考资料 AURIX TC275学习笔记1 资料收集Getting Started with AURIX™ Development Studio 官方帮助文档happy hacking for TC275! 硬件平台使用AURIX™ TC275 Lite 套件,按照参…...

Vim的基础命令
移动光标 H(左) J(上) K(下) L(右) $ 表示移动到光标所在行的行尾, ^ 表示移动到光标所在行的行首的第一个非空白字符。 0 表示移动到光标所在行的行首。 W 光标向前跳转一个单词 w光标向前跳转一个单词 B光标向后跳转一个单词 b光标向后跳转一个单词 G 移动光标到…...

Linux的简单使用和部署4asszaaa0
一.部署 1 环境搭建方式主要有四种: 1. 直接安装在物理机上.但是Linux桌面使用起来非常不友好.所以不建议.[不推荐]. 2. 使用虚拟机软件,将Linux搭建在虚拟机上.但是由于当前的虚拟机软件(如VMWare之类的)存在⼀些bug,会导致环境上出现各种莫名其妙的问题比较折腾.[非常不推荐…...

Linux 的 sysfs 伪文件系统介绍【用户可以通过文件操作与内核交互(如调用内核函数),而无需编写内核代码】
1. 什么是 sysfs伪文件系统? sysfs 是 Linux 内核提供的 伪文件系统,用于向用户空间暴露内核对象的信息和控制接口。它是 procfs 的补充,主要用于管理 设备、驱动、内核子系统 等信息,使用户可以通过文件操作(如用户空…...

每日一题洛谷P5721 【深基4.例6】数字直角三角形c++
#include<iostream> using namespace std; int main() {int n;cin >> n;int t 1;for (int i 0; i < n; i) {for (int j 0; j < n - i; j) {printf("%02d",t);t;}cout << endl;}return 0; }...

计算机网络笔记再战——理解几个经典的协议1
目录 前言 从协议是什么出发 关于TCP/IP协议体系 几个传输方式的分类 地址 网卡 中继器(Repeater) 网桥(Bridge) 路由器(Router) 网关 前言 笔者最近正在整理(笔者开的坑不少…...

ElasticSearch学习笔记-解析JSON格式的内容
如果需要屏蔽其他项目对Elasticsearch的直接访问操作,统一由一个入口访问操作Elasticsearch,可以考虑直接传入JSON格式语句解析执行。 相关依赖包 <properties><elasticsearch.version>7.9.3</elasticsearch.version><elasticsea…...
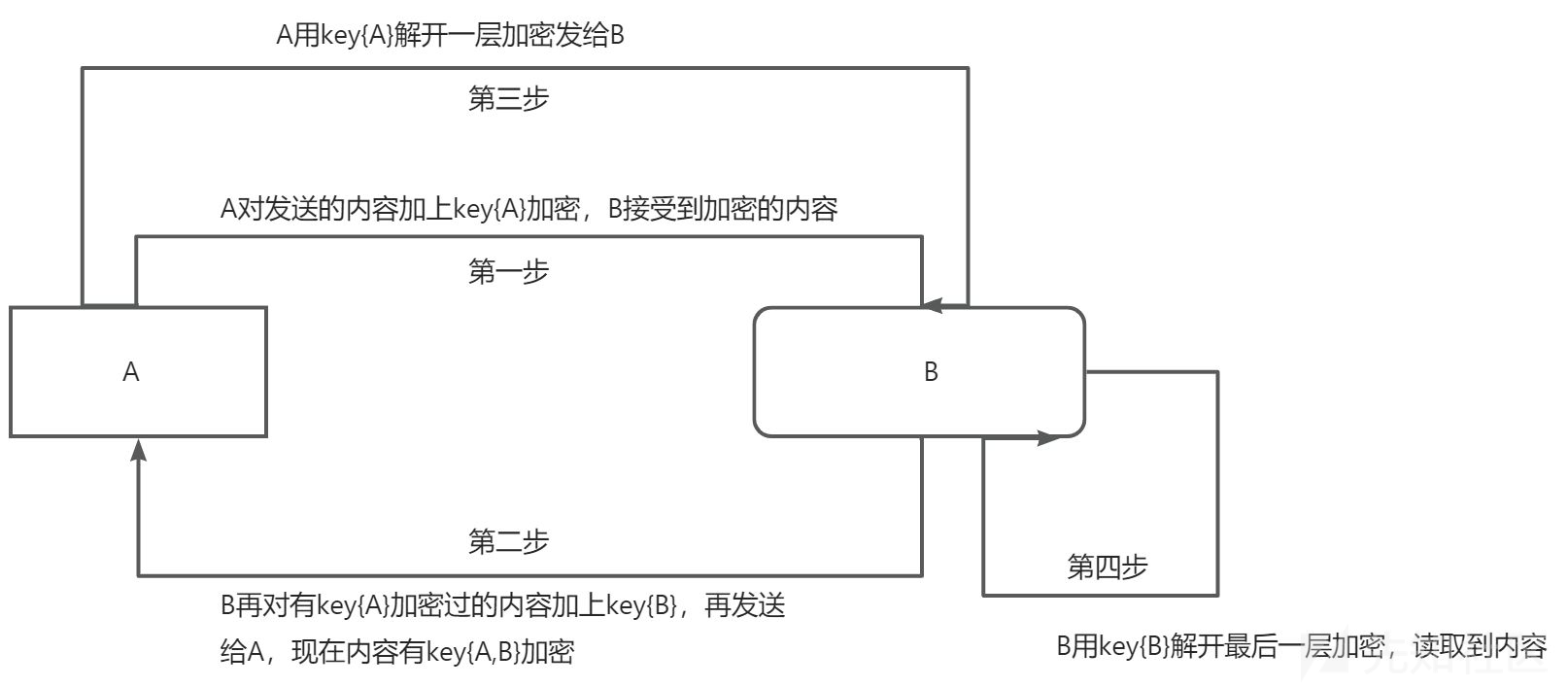
浅谈密码相关原理及代码实现
本代码仅供学习、研究、教育或合法用途。开发者明确声明其无意将该代码用于任何违法、犯罪或违反道德规范的行为。任何个人或组织在使用本代码时,需自行确保其行为符合所在国家或地区的法律法规。 开发者对任何因直接或间接使用该代码而导致的法律责任、经济损失或…...
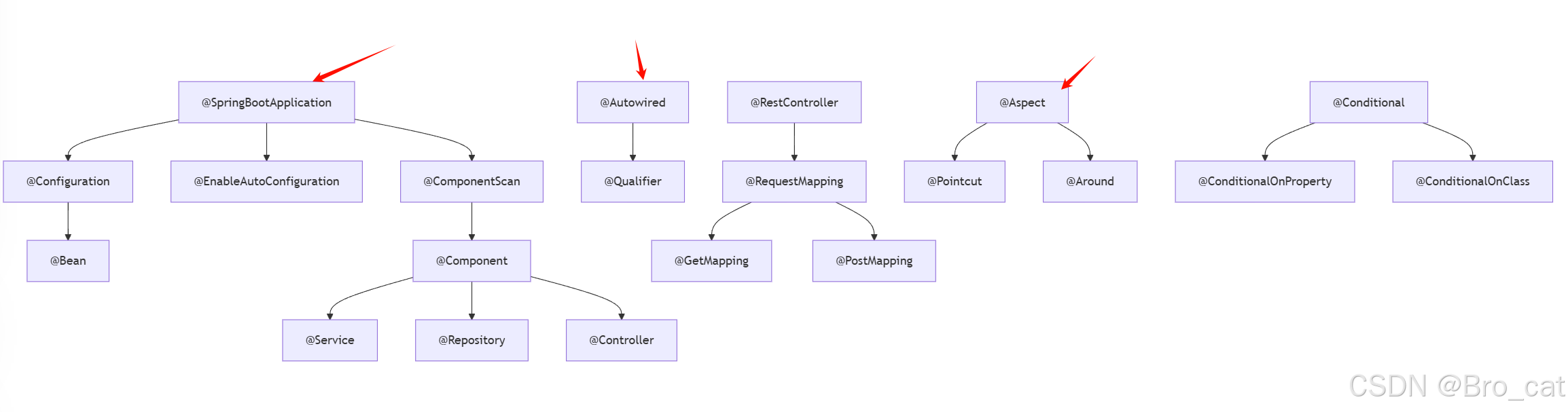
Spring Boot常用注解深度解析:从入门到精通
今天,这篇文章带你将深入理解Spring Boot中30常用注解,通过代码示例和关系图,帮助你彻底掌握Spring核心注解的使用场景和内在联系。 一、启动类与核心注解 1.1 SpringBootApplication 组合注解: SpringBootApplication Confi…...
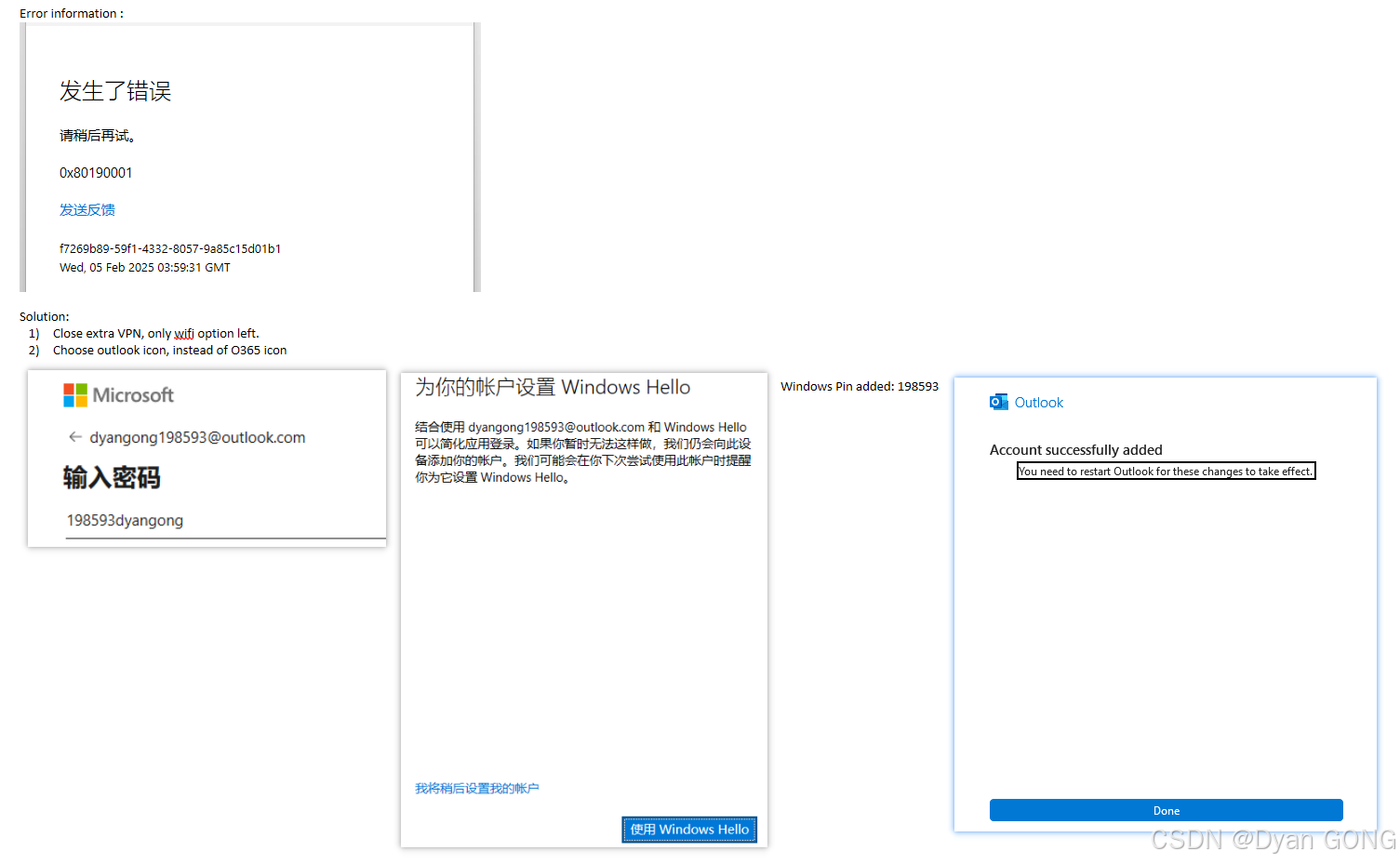
can not add outlook new accounts on the outlook
link : Reference url...
私有化部署 DeepSeek + Dify,构建你的专属私人 AI 助手
私有化部署 DeepSeek Dify,构建你的专属私人 AI 助手 概述 DeepSeek 是一款开创性的开源大语言模型,凭借其先进的算法架构和反思链能力,为 AI 对话交互带来了革新性的体验。通过私有化部署,你可以充分掌控数据安全和使用安全。…...

【Elasticsearch】post_filter
post_filter是 Elasticsearch 中的一种后置过滤机制,用于在查询执行完成后对结果进行过滤。以下是关于post_filter的详细介绍: 工作原理 • 查询后过滤:post_filter在查询执行完毕后对返回的文档集进行过滤。这意味着所有与查询匹配的文档都…...

验证工具:GVIM和VIM
一、定义与关系 gVim:gVim是Vim的图形界面版本,提供了更多的图形化功能,如菜单栏、工具栏和鼠标支持。它使得Vim的使用更加直观和方便,尤其对于不习惯命令行界面的用户来说。Vim:Vim是一个在命令行界面下运行的文本编…...
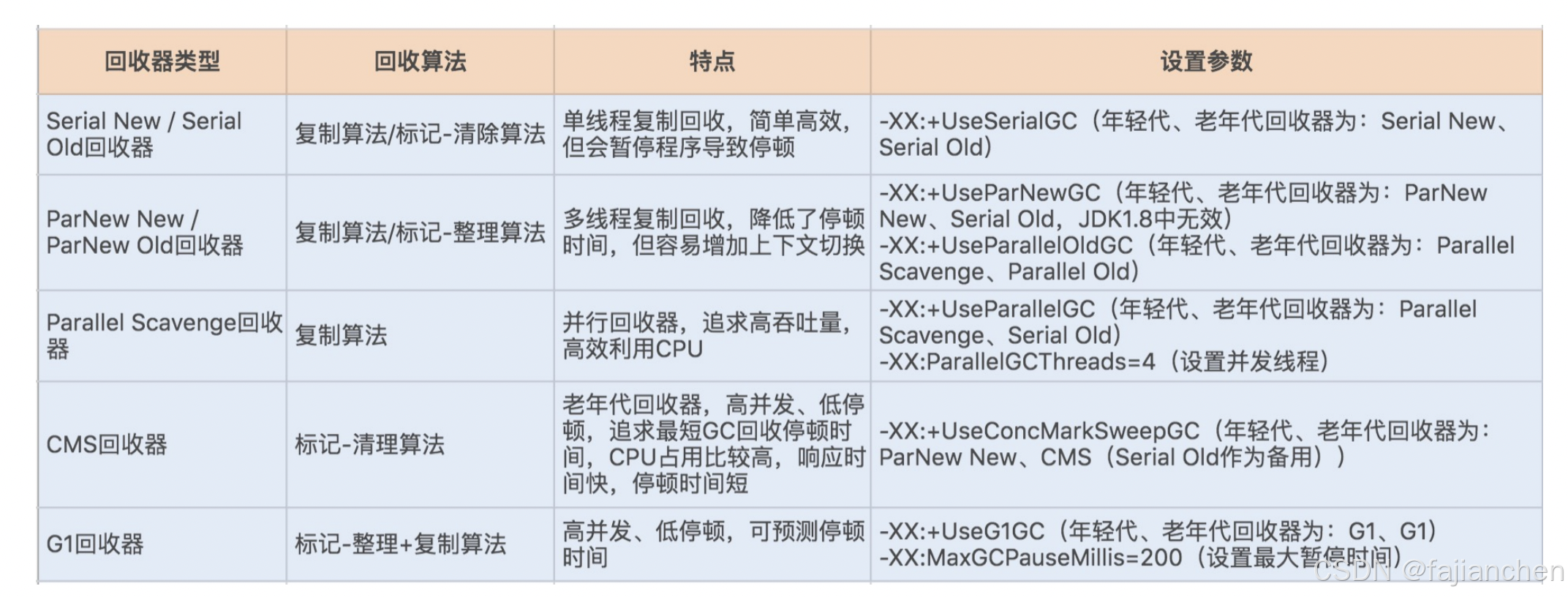
如何优化垃圾回收机制?
垃圾回收机制 掌握 GC 算法之前,我们需要先弄清楚 3 个问题。第一,回收发生在哪里?第二,对象在 什么时候可以被回收?第三,如何回收这些对象? 回收发生在哪里? JVM 的内存区域中&…...

beyond the ‘PHYSICAL‘ memory limit.问题处理
Container [pid5616,containerIDcontainer_e50_1734408743176_3027740_01_000006] is running 507887616B beyond the ‘PHYSICAL’ memory limit. Current usage: 4.5 GB of 4 GB physical memory used; 6.6 GB of 8.4 GB virtual memory used. Killing container. 1.增大map…...

Day36【AI思考】-表达式知识体系总览
文章目录 **表达式知识体系总览**回答1:**表达式知识体系****一、三种表达式形式对比****二、表达式转换核心方法****1. 中缀转后缀(重点)****2. 中缀转前缀** **三、表达式计算方法****1. 后缀表达式计算(栈实现)****…...
调试)
段错误(Segmentation Fault)调试
1. 使用 GDB(GNU Debugger) GDB 是一个强大的调试工具,可以帮助你逐步执行程序并检查变量状态。 编译时添加调试信息: gcc -g your_program.c -o your_program启动 GDB: gdb ./your_program运行程序: …...
Lombok 的 @Data 注解失效,未生成 getter/setter 方法引发的HTTP 406 错误
HTTP 状态码 406 (Not Acceptable) 和 500 (Internal Server Error) 是两类完全不同的错误,它们的含义、原因和解决方法都有显著区别。以下是详细对比: 1. HTTP 406 (Not Acceptable) 含义: 客户端请求的内容类型与服务器支持的内容类型不匹…...

Admin.Net中的消息通信SignalR解释
定义集线器接口 IOnlineUserHub public interface IOnlineUserHub {/// 在线用户列表Task OnlineUserList(OnlineUserList context);/// 强制下线Task ForceOffline(object context);/// 发布站内消息Task PublicNotice(SysNotice context);/// 接收消息Task ReceiveMessage(…...
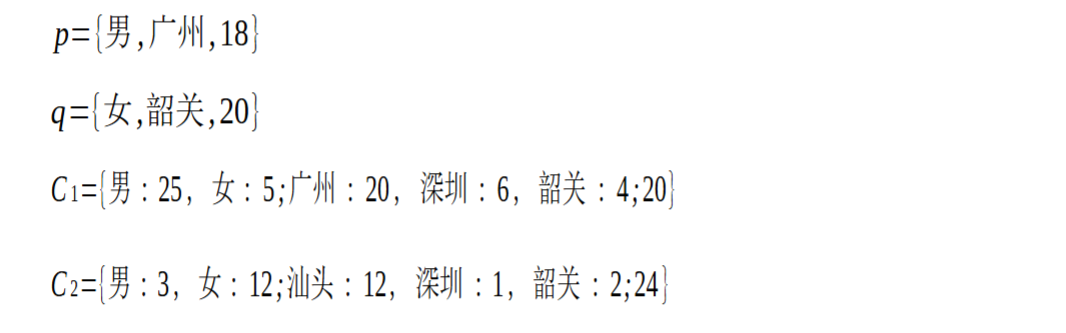
SCAU期末笔记 - 数据分析与数据挖掘题库解析
这门怎么题库答案不全啊日 来简单学一下子来 一、选择题(可多选) 将原始数据进行集成、变换、维度规约、数值规约是在以下哪个步骤的任务?(C) A. 频繁模式挖掘 B.分类和预测 C.数据预处理 D.数据流挖掘 A. 频繁模式挖掘:专注于发现数据中…...
高频面试之3Zookeeper
高频面试之3Zookeeper 文章目录 高频面试之3Zookeeper3.1 常用命令3.2 选举机制3.3 Zookeeper符合法则中哪两个?3.4 Zookeeper脑裂3.5 Zookeeper用来干嘛了 3.1 常用命令 ls、get、create、delete、deleteall3.2 选举机制 半数机制(过半机制࿰…...
微信小程序 - 手机震动
一、界面 <button type"primary" bindtap"shortVibrate">短震动</button> <button type"primary" bindtap"longVibrate">长震动</button> 二、js逻辑代码 注:文档 https://developers.weixin.qq…...
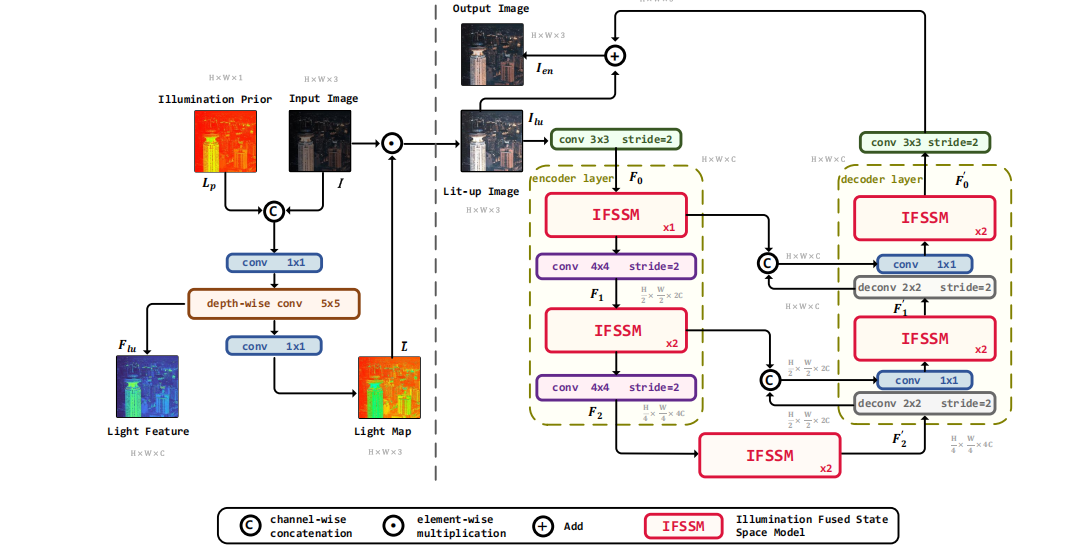
深度学习水论文:mamba+图像增强
🧀当前视觉领域对高效长序列建模需求激增,对Mamba图像增强这方向的研究自然也逐渐火热。原因在于其高效长程建模,以及动态计算优势,在图像质量提升和细节恢复方面有难以替代的作用。 🧀因此短时间内,就有不…...

从面试角度回答Android中ContentProvider启动原理
Android中ContentProvider原理的面试角度解析,分为已启动和未启动两种场景: 一、ContentProvider已启动的情况 1. 核心流程 触发条件:当其他组件(如Activity、Service)通过ContentR…...

Kafka主题运维全指南:从基础配置到故障处理
#作者:张桐瑞 文章目录 主题日常管理1. 修改主题分区。2. 修改主题级别参数。3. 变更副本数。4. 修改主题限速。5.主题分区迁移。6. 常见主题错误处理常见错误1:主题删除失败。常见错误2:__consumer_offsets占用太多的磁盘。 主题日常管理 …...
【C++】纯虚函数类外可以写实现吗?
1. 答案 先说答案,可以。 2.代码测试 .h头文件 #include <iostream> #include <string>// 抽象基类 class AbstractBase { public:AbstractBase() default;virtual ~AbstractBase() default; // 默认析构函数public:virtual int PureVirtualFunct…...

Ubuntu系统复制(U盘-电脑硬盘)
所需环境 电脑自带硬盘:1块 (1T) U盘1:Ubuntu系统引导盘(用于“U盘2”复制到“电脑自带硬盘”) U盘2:Ubuntu系统盘(1T,用于被复制) !!!建议“电脑…...