PyTorch学习笔记
PyTorch学习笔记(一):PyTorch环境安装
往期学习资料推荐:
1.Pytorch实战笔记_GoAI的博客-CSDN博客
2.Pytorch入门教程_GoAI的博客-CSDN博客
安装参考:
1.视频教程:3分钟深度学习【环境搭建】CUDA +Anaconda 简单粗暴_哔哩哔哩】
2.windows10下CUDA11.1、cuDNN8.0、tensorflow-gpu2.4.1安装教程以及问题解决方法_3.Win10中CUDA、cuDNN的安装与卸载
4.Pytorch详细安装-强推!
1.安装CUDA
- 安装包下载地址(主博客在介绍版本选择的时候也有提到)
官网各种version的CUDA下载地址
官网各种cuDNN下载地址 - 打开“cuda_8.0.44_win10.exe”,此过程会很慢,耐心等待(这也提示我该换电脑了)

选择解压地址(反正是临时的,就C盘吧,问题不大)

开始解压(此过程依然很慢,特别是我的电脑那段时间不知道出了什么问题CPU和内存占用异常高,这个过程也是费了我很多时间)
解压完毕,加在安装程序

- 开始安装


4. 敲黑板了!这里千万不要选默认的精简,这里的精简应该改成全部才对(看下面的小字说明,这就是全家桶),倒不是说安装全家桶不可以,主要是有一个东西的安装会一直导致安装失败
特别是这个visual studio integration千万不能选!

选择以下的安装就够了

就装在C盘吧,之后别的地方路径啥的会方便一点

- 安装成功


- 验证安装成功
(1)环境变量应该已经自动加好

(2)cmd里查看版本信息nvcc -V
(3)进入到路径下后查看GPU运行时的监测界面
(4)运行bandwidthTest.exe(需要先进入到所在目录)

(5)运行deviceQuery.exe(需要先进入到所在目录)

2.安装cuDNN
官网各种cuDNN下载地址
cuDNN称不上安装,只需要将下载下来的压缩包解压后,将对应文件夹的文件放到CUDA安装路径下的对应文件夹里即可

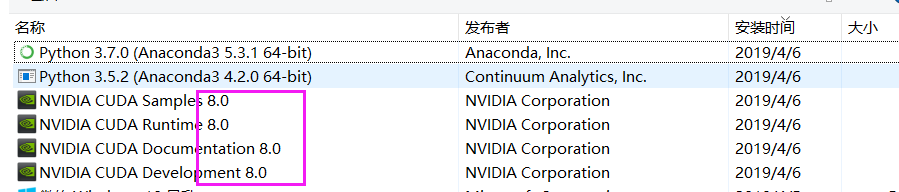
3.卸载
cuDNN本来就只是将文件拷贝进CUDA的安装目录,故删除即可(卸载CUDA后直接删除整个文件夹也可以)
CUDA的卸载:控制面板-卸载程序(不要用360等杀毒软件,找不到对应程序的),按照安装时间排序,最上面这几个带版本号的,就是刚才安装的CUDA了,挨个卸载即可
PyTorch学习笔记(二):PyTorch简介与基础知识
1. PyTorch简介
- 概念:由Facebook人工智能研究小组开发的一种基于Lua编写的Torch库的Python实现的深度学习库
- 优势:简洁、上手快、具有良好的文档和社区支持、项目开源、支持代码调试、丰富的扩展库
2 PyTorch基础知识
2.1张量
- 分类:0维张量(标量)、1维张量(向量)、2维张量(矩阵)、3维张量(时间序列)、4维张量(图像)、5维张量(视频)
- 概念:一个数据容器,可以包含数据、字符串等
import torch
# 创建tensor
x = torch.rand(4, 3)
print(x)
# 构造数据类型为long,数据是0的矩阵
x = torch.zeros(4, 3, dtype=torch.long)
print(x)
tensor([[0.9515, 0.6332, 0.8228],[0.3508, 0.0493, 0.7606],[0.7326, 0.7003, 0.1925],[0.1172, 0.8946, 0.9501]])
tensor([[0, 0, 0],[0, 0, 0],[0, 0, 0],[0, 0, 0]])
-
常见的构造Tensor的函数:
函数 功能 Tensor(*sizes) 基础构造函数 tensor(data) 类似于np.array ones(*sizes) 全1 zeros(*sizes) 全0 eye(*sizes) 对角为1,其余为0 arange(s,e,step) 从s到e,步长为step linspace(s,e,steps) 从s到e,均匀分成step份 rand/randn(*sizes) rand是[0,1)均匀分布;randn是服从N(0,1)的正态分布 normal(mean,std) 正态分布(均值为mean,标准差是std) randperm(m) 随机排列 -
操作:
- 使用索引表示的变量与原数据共享内存,即修改其中一个,另一个也会被修改
- 使用
torch.view改变tensor的大小 - 广播机制:当对两个形状不同的Tensor按元素运算时,可能会触发广播(broadcasting)机制
# 使用view改变张量的大小
x = torch.randn(5, 4)
y = x.view(20)
z = x.view(-1, 5) # -1是指这一维的维数由其他维度决定
print(x.size(), y.size(), z.size())
torch.Size([5, 4]) torch.Size([20]) torch.Size([4, 5])
x = tensor([[1, 2]])
y = tensor([[1],[2],[3]])
x + y = tensor([[2, 3],[3, 4],[4, 5]])
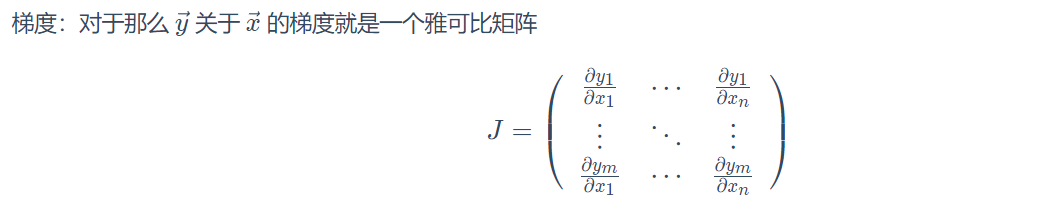
2.2 自动求导
autograd包:提供张量上的自动求导机制- 原理:如果设置
.requires_grad为True,那么将会追踪张量的所有操作。当完成计算后,可以通过调用.backward()自动计算所有的梯度。张量的所有梯度将会自动累加到.grad属性 Function:Tensor和Function互相连接生成了一个无环图 (acyclic graph),它编码了完整的计算历史。每个张量都有一个.grad_fn属性,该属性引用了创建Tensor自身的Function
x = torch.ones(2, 2, requires_grad=True)
print(x)
tensor([[1., 1.],[1., 1.]], requires_grad=True)
y = x ** 2
print(y)
tensor([[1., 1.],[1., 1.]], grad_fn=<PowBackward0>)
z = y * y * 3
out = z.mean()
print("z = ", z)
print("z mean = ", out)
z = tensor([[3., 3.],[3., 3.]], grad_fn=<MulBackward0>)
z mean = tensor(3., grad_fn=<MeanBackward0>)
grad的反向传播:运行反向传播,梯度都会累加之前的梯度,所以一般在反向传播之前需把梯度清零
out.backward()
print(x.grad)
tensor([[3., 3.],[3., 3.]])
# 反向传播累加
out2 = x.sum()
out2.backward()
print(x.grad)
tensor([[4., 4.],[4., 4.]])
2.3并行计算
-
目的:通过使用多个GPU参与训练,加快训练速度,提高模型学习的效果
-
CUDA:通过使用NVIDIA提供的GPU并行计算框架,采用
cuda()方法,让模型或者数据迁移到GPU中进行计算 -
并行计算方法:
- Network partitioning:将一个模型网络的各部分拆分,分配到不同的GPU中,执行不同的计算任务
- Layer-wise partitioning:将同一层模型拆分,分配到不同的GPU中,训练同一层模型的部分任务
- Data parallelism(主流):将不同的数据分配到不同的GPU中,执行相同的任务
PyTorch学习笔记(三):PyTorch主要组成模块
往期学习资料推荐:
1.Pytorch实战笔记_GoAI的博客-CSDN博客
2.Pytorch入门教程_GoAI的博客-CSDN博客
1 深度学习步骤
(1)数据预处理:通过专门的数据加载,通过批训练提高模型表现,每次训练读取固定数量的样本输入到模型中进行训练
(2)深度神经网络搭建:逐层搭建,实现特定功能的层(如积层、池化层、批正则化层、LSTM层等)
(3)损失函数和优化器的设定:保证反向传播能够在用户定义的模型结构上实现
(4)模型训练:使用并行计算加速训练,将数据按批加载,放入GPU中训练,对损失函数反向传播回网络最前面的层,同时使用优化器调整网络参数
2 基本配置
- 导入相关的包
import os
import numpy as py
import torch
import torch.nn as nn
from torch.utils.data
import Dataset, DataLoader
import torch.optim as optimizer
- 统一设置超参数:batch size、初始学习率、训练次数、GPU配置
# set batch size
batch_size = 16# 初始学习率
lr = 1e-4# 训练次数
max_epochs = 100# 配置GPU
device = torch.device("cuda:1" if torch.cuda.is_available() else "cpu")
devicedevice(type='cuda', index=1)
3 数据读入
-
读取方式:通过Dataset+DataLoader的方式加载数据,Dataset定义好数据的格式和数据变换形式,DataLoader用iterative的方式不断读入批次数据。
-
自定义Dataset类:实现
__init___、__getitem__、__len__函数 -
torch.utils.data.DataLoader参数:- batch_size:样本是按“批”读入的,表示每次读入的样本数
- num_workers:表示用于读取数据的进程数
- shuffle:是否将读入的数据打乱
- drop_last:对于样本最后一部分没有达到批次数的样本,使其不再参与训练
4 模型构建
4.1 神经网络的构造
通过Module类构造模型,实例化模型之后,可完成模型构造
# 构造多层感知机
class MLP(nn.Module):def __init__(self, **kwargs):super(MLP, self).__init__(**kwargs)self.hidden = nn.Linear(784, 256)self.act = nn.ReLU()self.output = nn.Linear(256, 10)def forward(self, X):o = self.act(self.hidden(x))return self.output(o)x = torch.rand(2, 784)
net = MLP()
print(x)
net(x)
tensor([[0.8924, 0.9624, 0.3262, ..., 0.8376, 0.1889, 0.9060],[0.3609, 0.8005, 0.5175, ..., 0.6255, 0.1462, 0.9846]])tensor([[-0.0902, 0.0199, 0.0677, -0.0679, 0.0799, 0.0826, 0.0628, 0.1809,-0.2387, 0.0366],[-0.2271, 0.0056, -0.0984, -0.0432, -0.0160, -0.0038, 0.0953, 0.0545,-0.1530, -0.0214]], grad_fn=<AddmmBackward>)
4.2 神经网络常见的层
- 不含模型参数的层
# 构造一个输入减去均值后输出的层
class MyLayer(nn.Module):def __init__(self, **kwargs):super(MyLayer, self).__init__(**kwargs)def forward(self, x):return x - x.mean()
x = torch.tensor([0, 5, 10, 15, 20], dtype=torch.float)
layer = MyLayer()
layer(x)
tensor([-10., -5., 0., 5., 10.])
- 含模型参数的层:如果一个
Tensor是Parameter,那么它会⾃动被添加到模型的参数列表里
# 使用ParameterList定义参数的列表
class MyListDense(nn.Module):def __init__(self):super(MyListDense, self).__init__()self.params = nn.ParameterList([nn.Parameter(torch.randn(4, 4)) for i in range(3)])self.params.append(nn.Parameter(torch.randn(4, 1)))def forward(self, x):for i in range(len(self.params)):x = torch.mm(x, self.params[i])return x
net = MyListDense()
print(net)
MyListDense((params): ParameterList((0): Parameter containing: [torch.FloatTensor of size 4x4](1): Parameter containing: [torch.FloatTensor of size 4x4](2): Parameter containing: [torch.FloatTensor of size 4x4](3): Parameter containing: [torch.FloatTensor of size 4x1])
)
# 使用ParameterDict定义参数的字典
class MyDictDense(nn.Module):def __init__(self):super(MyDictDense, self).__init__()self.params = nn.ParameterDict({'linear1': nn.Parameter(torch.randn(4, 4)),'linear2': nn.Parameter(torch.randn(4, 1))})# 新增参数linear3self.params.update({'linear3': nn.Parameter(torch.randn(4, 2))}) def forward(self, x, choice='linear1'):return torch.mm(x, self.params[choice])net = MyDictDense()
print(net)
MyDictDense((params): ParameterDict((linear1): Parameter containing: [torch.FloatTensor of size 4x4](linear2): Parameter containing: [torch.FloatTensor of size 4x1](linear3): Parameter containing: [torch.FloatTensor of size 4x2])
)- 二维卷积层:使用
nn.Conv2d类构造,模型参数包括卷积核和标量偏差,在训练模式时,通常先对卷积核随机初始化,再不断迭代卷积核和偏差
# 计算卷积层,对输入和输出做相应的升维和降维
def comp_conv2d(conv2d, X):# (1, 1)代表批量大小和通道数X = X.view((1, 1) + X.shape)Y = conv2d(X)# 排除不关心的前两维:批量和通道return Y.view(Y.shape[2:])
# 注意这里是两侧分别填充1⾏或列,所以在两侧一共填充2⾏或列
conv2d = nn.Conv2d(in_channels=1, out_channels=1, kernel_size=3,padding=1)X = torch.rand(8, 8)
comp_conv2d(conv2d, X).shape
torch.Size([8, 8])
- 池化层:直接计算池化窗口内元素的最大值或者平均值,分别叫做最大池化或平均池化
# 二维池化层
def pool2d(X, pool_size, mode='max'):p_h, p_w = pool_sizeY = torch.zeros((X.shape[0] - p_h + 1, X.shape[1] - p_w + 1))for i in range(Y.shape[0]):for j in range(Y.shape[1]):if mode == 'max':Y[i, j] = X[i: i + p_h, j: j + p_w].max()elif mode == 'avg':Y[i, j] = X[i: i + p_h, j: j + p_w].mean()return Y
X = torch.tensor([[0, 1, 2], [3, 4, 5], [6, 7, 8]], dtype=torch.float)
pool2d(X, (2, 2), 'max')
tensor([[4., 5.],[7., 8.]])
pool2d(X, (2, 2), 'avg')
tensor([[2., 3.],[5., 6.]])
4.3 模型示例
-
神经网络训练过程:
- 定义可学习参数的神经网络
- 在输入数据集上进行迭代训练
- 通过神经网络处理输入数据
- 计算loss(损失值)
- 将梯度反向传播给神经网络参数
- 更新网络参数,使用梯度下降
-
LeNet(前馈神经网络)
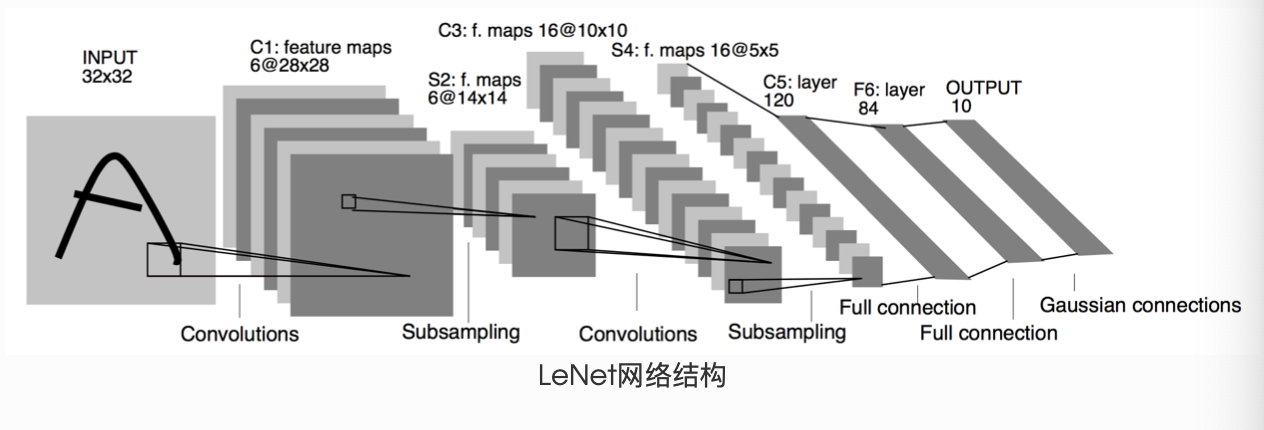
import torch.nn.functional as Fclass Net(nn.Module):def __init__(self):super(Net, self).__init__()# 输入图像channel是1;输出channel是6;5x5卷积核self.conv1 = nn.Conv2d(1, 6, 5)self.conv2 = nn.Conv2d(6, 16, 5)# an affine operation: y = Wx + bself.fc1 = nn.Linear(16 * 5 * 5, 120)self.fc2 = nn.Linear(120, 84)self.fc3 = nn.Linear(84, 10)def forward(self, x):# 2x2 Max poolingx = F.max_pool2d(F.relu(self.conv1(x)), (2, 2))# 如果是方阵,则可以只使用一个数字进行定义x = F.max_pool2d(F.relu(self.conv2(x)), 2)x = x.view(-1, self.num_flat_features(x))x = F.relu(self.fc1(x))x = F.relu(self.fc2(x))x = self.fc3(x)return xdef num_flat_features(self, x):# 除去批处理维度的其他所有维度size = x.size()[1:] num_features = 1for s in size:num_features *= sreturn num_featuresnet = Net()
net
Net((conv1): Conv2d(1, 6, kernel_size=(5, 5), stride=(1, 1))(conv2): Conv2d(6, 16, kernel_size=(5, 5), stride=(1, 1))(fc1): Linear(in_features=400, out_features=120, bias=True)(fc2): Linear(in_features=120, out_features=84, bias=True)(fc3): Linear(in_features=84, out_features=10, bias=True)
)
# 假设输入的数据为随机的32x32
input = torch.randn(1, 1, 32, 32)
out = net(input)
print(out)
tensor([[-0.0921, -0.0605, -0.0726, -0.0451, 0.1399, -0.0087, 0.1075, 0.0799,-0.1472, 0.0288]], grad_fn=<AddmmBackward>)
# 清零所有参数的梯度缓存,然后进行随机梯度的反向传播
net.zero_grad()
out.backward(torch.randn(1, 10))
- AlexNet
class AlexNet(nn.Module):def __init__(self):super(AlexNet, self).__init__()self.conv = nn.Sequential(# in_channels, out_channels, kernel_size, stride, paddingnn.Conv2d(1, 96, 11, 4), nn.ReLU(),# kernel_size, stridenn.MaxPool2d(3, 2), # 减小卷积窗口,使用填充为2来使得输入与输出的高和宽一致,且增大输出通道数nn.Conv2d(96, 256, 5, 1, 2),nn.ReLU(),nn.MaxPool2d(3, 2),# 连续3个卷积层,且使用更小的卷积窗口。# 除了最后的卷积层外,进一步增大了输出通道数。# 前两个卷积层后不使用池化层来减小输入的高和宽nn.Conv2d(256, 384, 3, 1, 1),nn.ReLU(),nn.Conv2d(384, 384, 3, 1, 1),nn.ReLU(),nn.Conv2d(384, 256, 3, 1, 1),nn.ReLU(),nn.MaxPool2d(3, 2))# 这里全连接层的输出个数比LeNet中的大数倍。使用丢弃层来缓解过拟合self.fc = nn.Sequential(nn.Linear(256*5*5, 4096),nn.ReLU(),nn.Dropout(0.5),nn.Linear(4096, 4096),nn.ReLU(),nn.Dropout(0.5),# 输出层。由于这里使用Fashion-MNIST,所以用类别数为10,而非论文中的1000nn.Linear(4096, 10),)def forward(self, img):feature = self.conv(img)output = self.fc(feature.view(img.shape[0], -1))return output
net = AlexNet()
print(net)
AlexNet((conv): Sequential((0): Conv2d(1, 96, kernel_size=(11, 11), stride=(4, 4))(1): ReLU()(2): MaxPool2d(kernel_size=3, stride=2, padding=0, dilation=1, ceil_mode=False)(3): Conv2d(96, 256, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2))(4): ReLU()(5): MaxPool2d(kernel_size=3, stride=2, padding=0, dilation=1, ceil_mode=False)(6): Conv2d(256, 384, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))(7): ReLU()(8): Conv2d(384, 384, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))(9): ReLU()(10): Conv2d(384, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))(11): ReLU()(12): MaxPool2d(kernel_size=3, stride=2, padding=0, dilation=1, ceil_mode=False))(fc): Sequential((0): Linear(in_features=6400, out_features=4096, bias=True)(1): ReLU()(2): Dropout(p=0.5, inplace=False)(3): Linear(in_features=4096, out_features=4096, bias=True)(4): ReLU()(5): Dropout(p=0.5, inplace=False)(6): Linear(in_features=4096, out_features=10, bias=True))
)
5 损失函数
- 二分类交叉熵损失函数:
torch.nn.BCELoss,用于计算二分类任务时的交叉熵
m = nn.Sigmoid()
loss = nn.BCELoss()
input = torch.randn(3, requires_grad=True)
target = torch.empty(3).random_(2)output = loss(m(input), target)
output.backward()
print('BCE损失函数的计算结果:',output)
BCE损失函数的计算结果: tensor(0.9389, grad_fn=<BinaryCrossEntropyBackward>)
- 交叉熵损失函数:
torch.nn.CrossEntropyLoss,用于计算交叉熵
loss = nn.CrossEntropyLoss()
input = torch.randn(3, 5, requires_grad=True)
target = torch.empty(3, dtype=torch.long).random_(5)output = loss(input, target)
output.backward()
print('CrossEntropy损失函数的计算结果:',output)
CrossEntropy损失函数的计算结果: tensor(2.7367, grad_fn=<NllLossBackward>)
- L1损失函数:
torch.nn.L1Loss,用于计算输出y和真实值target之差的绝对值
loss = nn.L1Loss()
input = torch.randn(3, 5, requires_grad=True)
target = torch.randn(3, 5)output = loss(input, target)
output.backward()
print('L1损失函数的计算结果:',output)
L1损失函数的计算结果: tensor(1.0351, grad_fn=<L1LossBackward>)
- MSE损失函数:torch.nn.MSELoss,用于计算输出y和真实值target之差的平方
loss = nn.MSELoss()
input = torch.randn(3, 5, requires_grad=True)
target = torch.randn(3, 5)output = loss(input, target)
output.backward()
print('MSE损失函数的计算结果:',output)
MSE损失函数的计算结果: tensor(1.7612, grad_fn=<MseLossBackward>)
- 平滑L1(Smooth L1)损失函数:
torch.nn.SmoothL1Loss,用于计算L1的平滑输出,减轻离群点带来的影响,通过与L1损失的比较,在0点的尖端处,过渡更为平滑
loss = nn.SmoothL1Loss()
input = torch.randn(3, 5, requires_grad=True)
target = torch.randn(3, 5)output = loss(input, target)
output.backward()
print('Smooth L1损失函数的计算结果:',output)
Smooth L1损失函数的计算结果: tensor(0.7252, grad_fn=<SmoothL1LossBackward>)
- 目标泊松分布的负对数似然损失:
torch.nn.PoissonNLLLoss
loss = nn.PoissonNLLLoss()
log_input = torch.randn(5, 2, requires_grad=True)
target = torch.randn(5, 2)output = loss(log_input, target)
output.backward()
print('PoissonNL损失函数的计算结果:',output)
PoissonNL损失函数的计算结果: tensor(1.7593, grad_fn=<MeanBackward0>)
- KL散度:
torch.nn.KLDivLoss,用于连续分布的距离度量,可用在对离散采用的连续输出空间分布的回归场景
inputs = torch.tensor([[0.5, 0.3, 0.2], [0.2, 0.3, 0.5]])
target = torch.tensor([[0.9, 0.05, 0.05], [0.1, 0.7, 0.2]], dtype=torch.float)
loss = nn.KLDivLoss(reduction='batchmean')output = loss(inputs,target)
print('KLDiv损失函数的计算结果:',output)
KLDiv损失函数的计算结果: tensor(-1.0006)
- MarginRankingLoss:
torch.nn.MarginRankingLoss,用于计算两组数据之间的差异(相似度),可使用在排序任务的场景
= nn.MarginRankingLoss() = torch.randn(3, requires_grad=True) = torch.randn(3, requires_grad=True) = torch.randn(3).sign() = loss(input1, input2, target).backward()('MarginRanking损失函数的计算结果:',output)
MarginRanking损失函数的计算结果: tensor(1.1762, grad_fn=<MeanBackward0>)
- 多标签边界损失函数:
torch.nn.MultiLabelMarginLoss,用于计算多标签分类问题的损失
loss = nn.MarginRankingLoss()
input1 = torch.randn(3, requires_grad=True)
input2 = torch.randn(3, requires_grad=True)
target = torch.randn(3).sign()output = loss(input1, input2, target)
output.backward()
print('MarginRanking损失函数的计算结果:',output)
MultiLabelMargin损失函数的计算结果: tensor(0.4500)
- 二分类损失函数:
torch.nn.SoftMarginLoss,用于计算二分类的logistic损失
loss = nn.MultiLabelMarginLoss()
x = torch.FloatTensor([[0.9, 0.2, 0.4, 0.8]])
# 真实的分类是,第3类和第0类
y = torch.LongTensor([[3, 0, -1, 1]])output = loss(x, y)
print('MultiLabelMargin损失函数的计算结果:',output)
SoftMargin损失函数的计算结果: tensor(0.6764)
- 多分类的折页损失函数:
torch.nn.MultiMarginLoss,用于计算多分类问题的折页损失
inputs = torch.tensor([[0.3, 0.7], [0.5, 0.5]])
target = torch.tensor([0, 1], dtype=torch.long) loss_f = nn.MultiMarginLoss()
output = loss_f(inputs, target)
print('MultiMargin损失函数的计算结果:',output)
MultiMargin损失函数的计算结果: tensor(0.6000)
- 三元组损失函数:
torch.nn.TripletMarginLoss,用于处理<实体1,关系,实体2>类型的数据,计算该类型数据的损失
triplet_loss = nn.TripletMarginLoss(margin=1.0, p=2)
anchor = torch.randn(100, 128, requires_grad=True)
positive = torch.randn(100, 128, requires_grad=True)
negative = torch.randn(100, 128, requires_grad=True)output = triplet_loss(anchor, positive, negative)
output.backward()
print('TripletMargin损失函数的计算结果:',output)
TripletMargin损失函数的计算结果: tensor(1.1507, grad_fn=<MeanBackward0>)
- HingEmbeddingLoss:
torch.nn.HingeEmbeddingLoss,用于计算输出的embedding结果的Hing损失
loss_f = nn.HingeEmbeddingLoss()
inputs = torch.tensor([[1., 0.8, 0.5]])
target = torch.tensor([[1, 1, -1]])output = loss_f(inputs,target)
print('HingEmbedding损失函数的计算结果:',output)
HingEmbedding损失函数的计算结果: tensor(0.7667)
- 余弦相似度:
torch.nn.CosineEmbeddingLoss,用于计算两个向量的余弦相似度,如果两个向量距离近,则损失函数值小,反之亦然
loss_f = nn.CosineEmbeddingLoss()
inputs_1 = torch.tensor([[0.3, 0.5, 0.7], [0.3, 0.5, 0.7]])
inputs_2 = torch.tensor([[0.1, 0.3, 0.5], [0.1, 0.3, 0.5]])
target = torch.tensor([1, -1], dtype=torch.float)output = loss_f(inputs_1,inputs_2,target)
print('CosineEmbedding损失函数的计算结果:',output)
CosineEmbedding损失函数的计算结果: tensor(0.5000)
- CTC损失函数:
torch.nn.CTCLoss,用于处理时序数据的分类问题,计算连续时间序列和目标序列之间的损失
# Target are to be padded
# 序列长度
T = 50
# 类别数(包括空类)
C = 20
# batch size
N = 16
# Target sequence length of longest target in batch (padding length)
S = 30
# Minimum target length, for demonstration purposes
S_min = 10 input = torch.randn(T, N, C).log_softmax(2).detach().requires_grad_()
# 初始化target(0 = blank, 1:C = classes)
target = torch.randint(low=1, high=C, size=(N, S), dtype=torch.long)input_lengths = torch.full(size=(N,), fill_value=T, dtype=torch.long)
target_lengths = torch.randint(low=S_min, high=S, size=(N,), dtype=torch.long)ctc_loss = nn.CTCLoss()
loss = ctc_loss(input, target, input_lengths, target_lengths)
loss.backward()
print('CTC损失函数的计算结果:',loss)
CTC损失函数的计算结果: tensor(6.1333, grad_fn=<MeanBackward0>)
6 优化器
6.1 Optimizer的属性和方法
-
使用方向:为了使求解参数过程更快,使用BP+优化器逼近求解
-
Optimizer的属性:
defaults:优化器的超参数state:参数的缓存param_groups:参数组,顺序是params,lr,momentum,dampening,weight_decay,nesterov
-
Optimizer的方法:
zero_grad():清空所管理参数的梯度step():执行一步梯度更新add_param_group():添加参数组load_state_dict():加载状态参数字典,可以用来进行模型的断点续训练,继续上次的参数进行训练state_dict():获取优化器当前状态信息字典
6.2 基本操作
# 设置权重,服从正态分布 --> 2 x 2
weight = torch.randn((2, 2), requires_grad=True)# 设置梯度为全1矩阵 --> 2 x 2
weight.grad = torch.ones((2, 2))# 输出现有的weight和data
print("The data of weight before step:\n{}".format(weight.data))
print("The grad of weight before step:\n{}".format(weight.grad))The data of weight before step:
tensor([[-0.5871, -1.1311],[-1.0446, 0.2656]])
The grad of weight before step:
tensor([[1., 1.],[1., 1.]])# 实例化优化器
optimizer = torch.optim.SGD([weight], lr=0.1, momentum=0.9)# 进行一步操作
optimizer.step()# 查看进行一步后的值,梯度
print("The data of weight after step:\n{}".format(weight.data))
print("The grad of weight after step:\n{}".format(weight.grad))The data of weight after step:
tensor([[-0.6871, -1.2311],[-1.1446, 0.1656]])
The grad of weight after step:
tensor([[1., 1.],[1., 1.]])# 权重清零
optimizer.zero_grad()# 检验权重是否为0
print("The grad of weight after optimizer.zero_grad():\n{}".format(weight.grad))The grad of weight after optimizer.zero_grad():
tensor([[0., 0.],[0., 0.]])
# 添加参数:weight2
weight2 = torch.randn((3, 3), requires_grad=True)
optimizer.add_param_group({"params": weight2, 'lr': 0.0001, 'nesterov': True})# 查看现有的参数
print("optimizer.param_groups is\n{}".format(optimizer.param_groups))# 查看当前状态信息
opt_state_dict = optimizer.state_dict()
print("state_dict before step:\n", opt_state_dict)optimizer.param_groups is
[{'params': [tensor([[-0.6871, -1.2311],[-1.1446, 0.1656]], requires_grad=True)], 'lr': 0.1, 'momentum': 0.9, 'dampening': 0, 'weight_decay': 0, 'nesterov': False}, {'params': [tensor([[ 0.0411, -0.6569, 0.7445],[-0.7056, 1.1146, -0.4409],[-0.2302, -1.1507, -1.3807]], requires_grad=True)], 'lr': 0.0001, 'nesterov': True, 'momentum': 0.9, 'dampening': 0, 'weight_decay': 0}]
state_dict before step:{'state': {0: {'momentum_buffer': tensor([[1., 1.],[1., 1.]])}}, 'param_groups': [{'lr': 0.1, 'momentum': 0.9, 'dampening': 0, 'weight_decay': 0, 'nesterov': False, 'params': [0]}, {'lr': 0.0001, 'nesterov': True, 'momentum': 0.9, 'dampening': 0, 'weight_decay': 0, 'params': [1]}]}
# 进行5次step操作
for _ in range(50):optimizer.step()
# 输出现有状态信息
print("state_dict after step:\n", optimizer.state_dict())state_dict after step:{'state': {0: {'momentum_buffer': tensor([[0.0052, 0.0052],[0.0052, 0.0052]])}}, 'param_groups': [{'lr': 0.1, 'momentum': 0.9, 'dampening': 0, 'weight_decay': 0, 'nesterov': False, 'params': [0]}, {'lr': 0.0001, 'nesterov': True, 'momentum': 0.9, 'dampening': 0, 'weight_decay': 0, 'params': [1]}]}7 训练与评估
def train(epoch):# 设置训练状态model.train()train_loss = 0# 循环读取DataLoader中的全部数据for data, label in train_loader:# 将数据放到GPU用于后续计算data, label = data.cuda(), label.cuda()# 将优化器的梯度清0optimizer.zero_grad()# 将数据输入给模型output = model(data)# 设置损失函数loss = criterion(label, output)# 将loss反向传播给网络loss.backward()# 使用优化器更新模型参数optimizer.step()# 累加训练损失train_loss += loss.item()*data.size(0)train_loss = train_loss/len(train_loader.dataset)print('Epoch: {} \tTraining Loss: {:.6f}'.format(epoch, train_loss))def val(epoch): # 设置验证状态model.eval()val_loss = 0# 不设置梯度with torch.no_grad():for data, label in val_loader:data, label = data.cuda(), label.cuda()output = model(data)preds = torch.argmax(output, 1)loss = criterion(output, label)val_loss += loss.item()*data.size(0)# 计算准确率running_accu += torch.sum(preds == label.data)val_loss = val_loss/len(val_loader.dataset)print('Epoch: {} \tTraining Loss: {:.6f}'.format(epoch, val_loss))
PyTorch学习笔记(四):PyTorch基础实战
通过一个基础实战案例,结合前面所涉及的PyTorch入门知识。本次任务是对10个类别的“时装”图像进行分类,使用FashionMNIST数据集(fashion-mnist/data/fashion at master · zalandoresearch/fashion-mnist · GitHub
FashionMNIST数据集中包含已经预先划分好的训练集和测试集,其中训练集共60,000张图像,测试集共10,000张图像。每张图像均为单通道黑白图像,大小为32*32pixel,分属10个类别。
1.导入必要****的包
import os
import numpy as np
import pandas as pd
import torch
import torch.nn as nn
import torch.optim as optim
from torch.utils.data import Dataset, DataLoader
2 配置训练环境和超参数
# 配置GPU,这里有两种方式
## 方案一:使用os.environ
os.environ['CUDA_VISIBLE_DEVICES'] = '0'
# 方案二:使用“device”,后续对要使用GPU的变量用.to(device)即可
#device = torch.device("cuda:1" if torch.cuda.is_available() else "cpu")## 配置其他超参数,如batch_size, num_workers, learning rate, 以及总的epochs
batch_size = 256
num_workers = 4 # 对于Windows用户,这里应设置为0,否则会出现多线程错误
lr = 1e-4
epochs = 20
3 数据读取和加载
这里同时展示两种方式:
- 下载并使用PyTorch提供的内置数据集
- 从网站下载以csv格式存储的数据,读入并转成预期的格式
第一种数据读入方式只适用于常见的数据集,如MNIST,CIFAR10等,PyTorch官方提供了数据下载。这种方式往往适用于快速测试方法(比如测试下某个idea在MNIST数据集上是否有效)
第二种数据读入方式需要自己构建Dataset,这对于PyTorch应用于自己的工作中十分重要
同时,还需要对数据进行必要的变换,比如说需要将图片统一为一致的大小,以便后续能够输入网络训练;需要将数据格式转为Tensor类,等等。
from torchvision import transforms# 设置数据变换
image_size = 28
data_transform = transforms.Compose([transforms.ToPILImage(), # 这一步取决于后续的数据读取方式,如果使用内置数据集则不需要transforms.Resize(image_size),transforms.ToTensor()
])
## 读取方式一:使用torchvision自带数据集,下载可能需要一段时间
from torchvision import datasetstrain_data = datasets.FashionMNIST(root='./', train=True, download=True, transform=data_transform)
test_data = datasets.FashionMNIST(root='./', train=False, download=True, transform=data_transform)
## 读取方式二:读入csv格式的数据,自行构建Dataset类,即自定义数据集
# csv数据下载链接:https://www.kaggle.com/zalando-research/fashionmnist
class FMDataset(Dataset):def __init__(self, df, transform=None):self.df = dfself.transform = transformself.images = df.iloc[:,1:].values.astype(np.uint8)self.labels = df.iloc[:, 0].valuesdef __len__(self):return len(self.images)def __getitem__(self, idx):image = self.images[idx].reshape(28,28,1)label = int(self.labels[idx])if self.transform is not None:image = self.transform(image)else:image = torch.tensor(image/255., dtype=torch.float)label = torch.tensor(label, dtype=torch.long)return image, labeltrain_df = pd.read_csv("./FashionMNIST/fashion-mnist_train.csv")
test_df = pd.read_csv("./FashionMNIST/fashion-mnist_test.csv")
train_data = FMDataset(train_df, data_transform)
test_data = FMDataset(test_df, data_transform)
在构建训练和测试数据集完成后,需要定义DataLoader类,以便在训练和测试时加载数据
train_loader = DataLoader(train_data, batch_size=batch_size, shuffle=True, num_workers=num_workers, drop_last=True)
test_loader = DataLoader(test_data, batch_size=batch_size, shuffle=False, num_workers=num_workers)
读入后,我们可以做一些数据可视化操作,主要是验证我们读入的数据是否正确
import matplotlib.pyplot as plt
image, label = next(iter(train_loader))
print(image.shape, label.shape)
plt.imshow(image[0][0], cmap="gray")
torch.Size([256, 1, 28, 28]) torch.Size([256])
<matplotlib.image.AxesImage at 0x1b39b49fcc8>

4.模型设计
# 使用CNN
class Net(nn.Module):def __init__(self):super(Net, self).__init__()self.conv = nn.Sequential(nn.Conv2d(1, 32, 5),nn.ReLU(),nn.MaxPool2d(2, stride=2),nn.Dropout(0.3),nn.Conv2d(32, 64, 5),nn.ReLU(),nn.MaxPool2d(2, stride=2),nn.Dropout(0.3))self.fc = nn.Sequential(nn.Linear(64*4*4, 512),nn.ReLU(),nn.Linear(512, 10))def forward(self, x):x = self.conv(x)x = x.view(-1, 64*4*4)x = self.fc(x)# x = nn.functional.normalize(x)return x
model = Net()
model = model.cuda()
5 设置损失函数和优化器
使用torch.nn模块自带的CrossEntropy损失。
PyTorch会自动把整数型的label转为one-hot型,用于计算CE loss
这里需要确保label是从0开始的,同时模型不加softmax层(使用logits计算),这也说明了PyTorch训练中各个部分不是独立的,需要通盘考虑。
# 使用交叉熵损失函数
criterion = nn.CrossEntropyLoss()
# 使用Adam优化器
optimizer = optim.Adam(model.parameters(), lr=0.001)
6.训练与测试
各自封装成函数,方便后续调用
关注两者的主要区别:
- 模型状态设置
- 是否需要初始化优化器
- 是否需要将loss传回到网络
- 是否需要每步更新optimizer
此外,对于测试或验证过程,可以计算分类准确率。
训练:
def train(epoch):# 设置训练状态model.train()train_loss = 0# 循环读取DataLoader中的全部数据for data, label in train_loader:# 将数据放到GPU用于后续计算data, label = data.cuda(), label.cuda()# 将优化器的梯度清0optimizer.zero_grad()# 将数据输入给模型output = model(data)# 设置损失函数loss = criterion(output, label)# 将loss反向传播给网络loss.backward()# 使用优化器更新模型参数optimizer.step()# 累加训练损失train_loss += loss.item() * data.size(0)train_loss = train_loss/len(train_loader.dataset)print('Epoch: {} \tTraining Loss: {:.6f}'.format(epoch, train_loss))验证:
def val(epoch): # 设置验证状态model.eval()val_loss = 0gt_labels = []pred_labels = []# 不设置梯度with torch.no_grad():for data, label in test_loader:data, label = data.cuda(), label.cuda()output = model(data)preds = torch.argmax(output, 1)gt_labels.append(label.cpu().data.numpy())pred_labels.append(preds.cpu().data.numpy())loss = criterion(output, label)val_loss += loss.item()*data.size(0)# 计算验证集的平均损失val_loss = val_loss/len(test_loader.dataset)gt_labels, pred_labels = np.concatenate(gt_labels), np.concatenate(pred_labels)# 计算准确率acc = np.sum(gt_labels==pred_labels)/len(pred_labels)print('Epoch: {} \tValidation Loss: {:.6f}, Accuracy: {:6f}'.format(epoch, val_loss, acc))
for epoch in range(1, epochs+1):train(epoch)val(epoch)
Epoch: 1 Training Loss: 0.664049
Epoch: 1 Validation Loss: 0.421500, Accuracy: 0.852400
Epoch: 2 Training Loss: 0.417311
Epoch: 2 Validation Loss: 0.349790, Accuracy: 0.871200
Epoch: 3 Training Loss: 0.355448
Epoch: 3 Validation Loss: 0.318987, Accuracy: 0.879500
Epoch: 4 Training Loss: 0.323644
Epoch: 4 Validation Loss: 0.290521, Accuracy: 0.893800
Epoch: 5 Training Loss: 0.301900
Epoch: 5 Validation Loss: 0.266420, Accuracy: 0.901300
Epoch: 6 Training Loss: 0.286696
Epoch: 6 Validation Loss: 0.246448, Accuracy: 0.909700
Epoch: 7 Training Loss: 0.271441
Epoch: 7 Validation Loss: 0.241845, Accuracy: 0.911200
Epoch: 8 Training Loss: 0.260185
Epoch: 8 Validation Loss: 0.243311, Accuracy: 0.910800
Epoch: 9 Training Loss: 0.247986
Epoch: 9 Validation Loss: 0.225896, Accuracy: 0.916200
Epoch: 10 Training Loss: 0.240718
Epoch: 10 Validation Loss: 0.227848, Accuracy: 0.914700
Epoch: 11 Training Loss: 0.232358
Epoch: 11 Validation Loss: 0.220180, Accuracy: 0.917500
Epoch: 12 Training Loss: 0.223933
Epoch: 12 Validation Loss: 0.215308, Accuracy: 0.919400
Epoch: 13 Training Loss: 0.218354
Epoch: 13 Validation Loss: 0.211890, Accuracy: 0.919300
Epoch: 14 Training Loss: 0.210027
Epoch: 14 Validation Loss: 0.209707, Accuracy: 0.922700
Epoch: 15 Training Loss: 0.203024
Epoch: 15 Validation Loss: 0.208233, Accuracy: 0.925600
Epoch: 16 Training Loss: 0.196965
Epoch: 16 Validation Loss: 0.208209, Accuracy: 0.921900
Epoch: 17 Training Loss: 0.193155
Epoch: 17 Validation Loss: 0.200000, Accuracy: 0.926100
Epoch: 18 Training Loss: 0.184376
Epoch: 18 Validation Loss: 0.197259, Accuracy: 0.926200
Epoch: 19 Training Loss: 0.184272
Epoch: 19 Validation Loss: 0.200259, Accuracy: 0.926000
Epoch: 20 Training Loss: 0.172641
Epoch: 20 Validation Loss: 0.200177, Accuracy: 0.927100
7.模型保存
训练完成后,可以使用torch.save保存模型参数或者整个模型,也可以在训练过程中保存模型
save_path = "./FahionModel.pkl"
torch.save(model, save_path)
PyTorch学习笔记(五):模型定义、修改、保存
一、PyTorch模型定义的方式
- Module 类是 torch.nn 模块里提供的一个模型构造类 (nn.Module),是所有神经⽹网络模块的基类,我们可以继承它来定义我们想要的模型;
- PyTorch模型定义应包括两个主要部分:各个部分的初始化(_init_);数据流向定义(forward)
基于nn.Module,可以通过Sequential,ModuleList和ModuleDict三种方式定义PyTorch模型。
1.Sequential
对应模块为nn.Sequential()。
当模型的前向计算为简单串联各个层的计算时, Sequential 类可以通过更加简单的方式定义模型。它可以接收一个子模块的有序字典(OrderedDict) 或者一系列子模块作为参数来逐一添加 Module 的实例,⽽模型的前向计算就是将这些实例按添加的顺序逐⼀计算。我们结合Sequential和定义方式加以理解:
class MySequential(nn.Module):from collections import OrderedDictdef __init__(self, *args):super(MySequential, self).__init__()if len(args) == 1 and isinstance(args[0], OrderedDict): # 如果传入的是一个OrderedDictfor key, module in args[0].items():self.add_module(key, module) # add_module方法会将module添加进self._modules(一个OrderedDict)else: # 传入的是一些Modulefor idx, module in enumerate(args):self.add_module(str(idx), module)def forward(self, input):# self._modules返回一个 OrderedDict,保证会按照成员添加时的顺序遍历成for module in self._modules.values():input = module(input)return input
下面来看下如何使用Sequential来定义模型。只需要将模型的层按序排列起来即可,根据层名的不同,排列的时候有两种方式:
import torch.nn as nn
net = nn.Sequential(nn.Linear(784, 256),nn.ReLU(),nn.Linear(256, 10), )
print(net)
Sequential((0): Linear(in_features=784, out_features=256, bias=True)(1): ReLU()(2): Linear(in_features=256, out_features=10, bias=True)
)
import collections
import torch.nn as nn
net2 = nn.Sequential(collections.OrderedDict([('fc1', nn.Linear(784, 256)),('relu1', nn.ReLU()),('fc2', nn.Linear(256, 10))]))
print(net2)
Sequential((fc1): Linear(in_features=784, out_features=256, bias=True)(relu1): ReLU()(fc2): Linear(in_features=256, out_features=10, bias=True)
)
可以看到,使用Sequential定义模型的好处在于简单、易读,同时使用Sequential定义的模型不需要再写forward,因为顺序已经定义好了。但使用Sequential也会使得模型定义丧失灵活性,比如需要在模型中间加入一个外部输入时就不适合用Sequential的方式实现。使用时需根据实际需求加以选择。
2.ModuleList
对应模块为nn.ModuleList()。
ModuleList 接收一个子模块(或层,需属于nn.Module类)的列表作为输入,然后也可以类似List那样进行append和extend操作。同时,子模块或层的权重也会自动添加到网络中来。
net = nn.ModuleList([nn.Linear(784, 256), nn.ReLU()])
net.append(nn.Linear(256, 10)) # # 类似List的append操作
print(net[-1]) # 类似List的索引访问
print(net)
Linear(in_features=256, out_features=10, bias=True)
ModuleList((0): Linear(in_features=784, out_features=256, bias=True)(1): ReLU()(2): Linear(in_features=256, out_features=10, bias=True)
)
要特别注意的是,nn.ModuleList 并没有定义一个网络,它只是将不同的模块储存在一起。ModuleList中元素的先后顺序并不代表其在网络中的真实位置顺序,需要经过forward函数指定各个层的先后顺序后才算完成了模型的定义。具体实现时用for循环即可完成:
class model(nn.Module):def __init__(self, ...):self.modulelist = ......def forward(self, x):for layer in self.modulelist:x = layer(x)return x
3.ModuleDict
对应模块为nn.ModuleDict()。
ModuleDict和ModuleList的作用类似,只是ModuleDict能够更方便地为神经网络的层添加名称。
net = nn.ModuleDict({'linear': nn.Linear(784, 256),'act': nn.ReLU(),
})
net['output'] = nn.Linear(256, 10) # 添加
print(net['linear']) # 访问
print(net.output)
print(net)
Linear(in_features=784, out_features=256, bias=True)
Linear(in_features=256, out_features=10, bias=True)
ModuleDict((act): ReLU()(linear): Linear(in_features=784, out_features=256, bias=True)(output): Linear(in_features=256, out_features=10, bias=True)
)
三种方法的比较总结
- Sequential适用于快速验证结果,不需要同时写__init__和forward;
- ModuleList和ModuleDict在某个完全相同的层需要重复出现多次时,非常方便实现,可以”一行顶多行“;
- 当我们需要之前层的信息的时候,比如 ResNets 中的残差计算,当前层的结果需要和之前层中的结果进行融合,一般使用 ModuleList/ModuleDict 比较方便。
二、利用模型块快速搭建复杂网络
模型搭建基本方法:
- 模型块分析
- 模型块实现
- 利用模型块组装模型
以U-Net模型为例,该模型为分割模型,通过残差连接结构解决了模型学习中的退化问题,使得神经网络的深度能够不断扩展。

模型块分析
- 每个子块内部的两次卷积
DoubleConv - 左侧模型块之间的下采样连接
Down,通过Max pooling来实现 - 右侧模型块之间的上采样连接
Up - 输出层的处理
OutConv - 模型块之间的横向连接,输入和U-Net底部的连接等计算,这些单独的操作可以通过forward函数来实现
模型块实现
以U-net为例:
# 两次卷积 conv 3x3, ReLU
class DoubleConv(nn.Module):"""(convolution => [BN] => ReLU) * 2"""def __init__(self, in_channels, out_channels, mid_channels=None):super().__init__()if not mid_channels:mid_channels = out_channelsself.double_conv = nn.Sequential(nn.Conv2d(in_channels, mid_channels, kernel_size=3, padding=1, bias=False),nn.BatchNorm2d(mid_channels),nn.ReLU(inplace=True),nn.Conv2d(mid_channels, out_channels, kernel_size=3, padding=1, bias=False),nn.BatchNorm2d(out_channels),nn.ReLU(inplace=True))def forward(self, x):return self.double_conv(x)# 下采样 max pool 2x2
class Down(nn.Module):"""Downscaling with maxpool then double conv"""def __init__(self, in_channels, out_channels):super().__init__()self.maxpool_conv = nn.Sequential(nn.MaxPool2d(2),DoubleConv(in_channels, out_channels))def forward(self, x):return self.maxpool_conv(x)
# 上采样 up-conv 2x2
class Up(nn.Module):"""Upscaling then double conv"""def __init__(self, in_channels, out_channels, bilinear=True):super().__init__()# if bilinear, use the normal convolutions to reduce the number of channelsif bilinear:self.up = nn.Upsample(scale_factor=2, mode='bilinear', align_corners=True)self.conv = DoubleConv(in_channels, out_channels, in_channels // 2)else:self.up = nn.ConvTranspose2d(in_channels, in_channels // 2, kernel_size=2, stride=2)self.conv = DoubleConv(in_channels, out_channels)def forward(self, x1, x2):x1 = self.up(x1)# input is CHWdiffY = x2.size()[2] - x1.size()[2]diffX = x2.size()[3] - x1.size()[3]x1 = F.pad(x1, [diffX // 2, diffX - diffX // 2,diffY // 2, diffY - diffY // 2])x = torch.cat([x2, x1], dim=1)# 输出 conv 1x1
class OutConv(nn.Module):def __init__(self, in_channels, out_channels):super(OutConv, self).__init__()self.conv = nn.Conv2d(in_channels, out_channels, kernel_size=1)def forward(self, x):return self.conv(x)
利用模型块组装U-net模型
class UNet(nn.Module):def __init__(self, n_channels, n_classes, bilinear=True):super(UNet, self).__init__()self.n_channels = n_channelsself.n_classes = n_classesself.bilinear = bilinearself.inc = DoubleConv(n_channels, 64)self.down1 = Down(64, 128)self.down2 = Down(128, 256)self.down3 = Down(256, 512)factor = 2 if bilinear else 1self.down4 = Down(512, 1024 // factor)self.up1 = Up(1024, 512 // factor, bilinear)self.up2 = Up(512, 256 // factor, bilinear)self.up3 = Up(256, 128 // factor, bilinear)self.up4 = Up(128, 64, bilinear)self.outc = OutConv(64, n_classes)def forward(self, x):x1 = self.inc(x)x2 = self.down1(x1)x3 = self.down2(x2)x4 = self.down3(x3)x5 = self.down4(x4)x = self.up1(x5, x4)x = self.up2(x, x3)x = self.up3(x, x2)x = self.up4(x, x1)logits = self.outc(x)return logits
三、PyTorch修改模型
1.模型层
以pytorch中torchvision库预定义好的模型ResNet50为例,模型参数如下:
import torchvision.models as models
net = models.resnet50()
print(net)
ResNet((conv1): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3), bias=False)(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace=True)(maxpool): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False)(layer1): Sequential((0): Bottleneck((conv1): Conv2d(64, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)(bn3): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace=True)(downsample): Sequential((0): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)))
..............(avgpool): AdaptiveAvgPool2d(output_size=(1, 1))(fc): Linear(in_features=2048, out_features=1000, bias=True)
)为了适配ImageNet预训练的权重,因此最后全连接层(fc)的输出节点数是1000。假设我们要用这个resnet模型去做一个10分类的问题,就应该修改模型的fc层,将其输出节点数替换为10。另外,我们觉得一层全连接层可能太少了,想再加一层。
可以做如下修改:
from collections import OrderedDict
classifier = nn.Sequential(OrderedDict([('fc1', nn.Linear(2048, 128)),('relu1', nn.ReLU()), ('dropout1',nn.Dropout(0.5)),('fc2', nn.Linear(128, 10)),('output', nn.Softmax(dim=1))]))net.fc = classifier
这里的操作相当于将模型(net)最后名称为“fc”的层替换成了名称为“classifier”的结构,该结构是我们自己定义的。这里使用了Sequential+OrderedDict的模型定义方式,现在的模型就可以去做10分类任务了。
2.添加外部输入
有时候在模型训练中,除了已有模型的输入之外,还需要输入额外的信息。比如在CNN网络中,我们除了输入图像,还需要同时输入图像对应的其他信息,这时候就需要在已有的CNN网络中添加额外的输入变量。基本思路是:将原模型添加输入位置前的部分作为一个整体,同时在forward中定义好原模型不变的部分、添加的输入和后续层之间的连接关系,从而完成模型的修改。
我们以torchvision的resnet50模型为基础,任务还是10分类任务。不同点在于,我们希望利用已有的模型结构,在倒数第二层增加一个额外的输入变量add_variable来辅助预测。具体实现如下:
class Model(nn.Module):def __init__(self, net):super(Model, self).__init__()self.net = netself.relu = nn.ReLU()self.dropout = nn.Dropout(0.5)self.fc_add = nn.Linear(1001, 10, bias=True)self.output = nn.Softmax(dim=1)def forward(self, x, add_variable):x = self.net(x)x = torch.cat((self.dropout(self.relu(x)), add_variable.unsqueeze(1)),1)x = self.fc_add(x)x = self.output(x)return x
这里的实现要点是通过torch.cat实现了tensor的拼接。torchvision中的resnet50输出是一个1000维的tensor,我们通过修改forward函数(配套定义一些层),先将2048维的tensor通过激活函数层和dropout层,再和外部输入变量"add_variable"拼接,最后通过全连接层映射到指定的输出维度10。
另外这里对外部输入变量"add_variable"进行unsqueeze操作是为了和net输出的tensor保持维度一致,常用于add_variable是单一数值 (scalar) 的情况,此时add_variable的维度是 (batch_size, ),需要在第二维补充维数1,从而可以和tensor进行torch.cat操作。对于unsqueeze操作可以复习下2.1节的内容和配套代码 😃
之后对我们修改好的模型结构进行实例化,就可以使用了:
import torchvision.models as models
net = models.resnet50()
model = Model(net).cuda()
另外别忘了,训练中在输入数据的时候要给两个inputs:
outputs = model(inputs, add_var)
3.添加额外输出
有时候在模型训练中,除了模型最后的输出外,我们需要输出模型某一中间层的结果,以施加额外的监督,获得更好的中间层结果。基本的思路是修改模型定义中forward函数的return变量。
我们依然以resnet50做10分类任务为例,在已经定义好的模型结构上,同时输出1000维的倒数第二层和10维的最后一层结果。具体实现如下:
class Model(nn.Module):def __init__(self, net):super(Model, self).__init__()self.net = netself.relu = nn.ReLU()self.dropout = nn.Dropout(0.5)self.fc1 = nn.Linear(1000, 10, bias=True)self.output = nn.Softmax(dim=1)def forward(self, x, add_variable):x1000 = self.net(x)x10 = self.dropout(self.relu(x1000))x10 = self.fc1(x10)x10 = self.output(x10)return x10, x1000
之后对我们修改好的模型结构进行实例化,就可以使用了:
import torchvision.models as models
net = models.resnet50()
model = Model(net).cuda()
#另外别忘了,训练中在输入数据后会有两个outputs:out10, out1000 = model(inputs, add_var)
四、PyTorch模型保存与读取
1.模型存储格式
PyTorch存储模型主要采用pkl,pt,pth三种格式。就使用层面来说没有区别,这里不做具体的讨论。本节最后的参考内容中列出了查阅到的一些资料,感兴趣的读者可以进一步研究,欢迎留言讨论。
3.模型存储内容
一个PyTorch模型主要包含两个部分:模型结构和权重。其中模型是继承nn.Module的类,权重的数据结构是一个字典(key是层名,value是权重向量)。存储也由此分为两种形式:存储整个模型(包括结构和权重),和只存储模型权重。
from torchvision import models
model = models.resnet152(pretrained=True)# 保存整个模型
torch.save(model, save_dir)
# 保存模型权重
torch.save(model.state_dict, save_dir)
对于PyTorch而言,pt, pth和pkl三种数据格式均支持模型权重和整个模型存储,使用上没有差别。
保存+读取整个模型
torch.save(model, save_dir)
loaded_model = torch.load(save_dir)
loaded_model.cuda()
保存+读取模型权重
torch.save(model.state_dict(), save_dir)
loaded_dict = torch.load(save_dir)
loaded_model = models.resnet152() #注意这里需要对模型结构有定义
loaded_model.state_dict = loaded_dict
loaded_model.cuda()
模型保存文章推荐:阿里云登录 - 欢迎登录阿里云,安全稳定的云计算服务平台
PyTorch学习笔记(六):PyTorch进阶训练技巧
import torch
import torch.nn as nn
import torch.nn.functional as F
1 自定义损失函数
-
以函数方式定义:通过输出值和目标值进行计算,返回损失值
-
以类方式定义:通过继承
nn.Module,将其当做神经网络的一层来看待
以DiceLoss损失函数为例,定义如下:
DSC = \frac{2|X∩Y|}{|X|+|Y|}DSC=∣X∣+∣Y∣2∣X∩Y∣
class DiceLoss(nn.Module):def __init__(self, weight=None, size_average=True):super(DiceLoss,self).__init__()def forward(self, inputs, targets, smooth=1):inputs = F.sigmoid(inputs) inputs = inputs.view(-1)targets = targets.view(-1)intersection = (inputs * targets).sum() dice = (2.*intersection + smooth)/(inputs.sum() + targets.sum() + smooth) return 1 - dice
2 动态调整学习率
-
Scheduler:学习率衰减策略,解决学习率选择的问题,用于提高精度
-
PyTorch Scheduler策略:
- lr_scheduler.LambdaLR
- lr_scheduler.MultiplicativeLR
- lr_scheduler.StepLR
- lr_scheduler.MultiStepLR
- lr_scheduler.ExponentialLR
- lr_scheduler.CosineAnnealingLR
- lr_scheduler.ReduceLROnPlateau
- lr_scheduler.CyclicLR
- lr_scheduler.OneCycleLR
- lr_scheduler.CosineAnnealingWarmRestarts
-
使用说明:需要将
scheduler.step()放在optimizer.step()后面 -
自定义Scheduler:通过自定义函数对学习率进行修改
3 模型微调
-
概念:找到一个同类已训练好的模型,调整模型参数,使用数据进行训练。
-
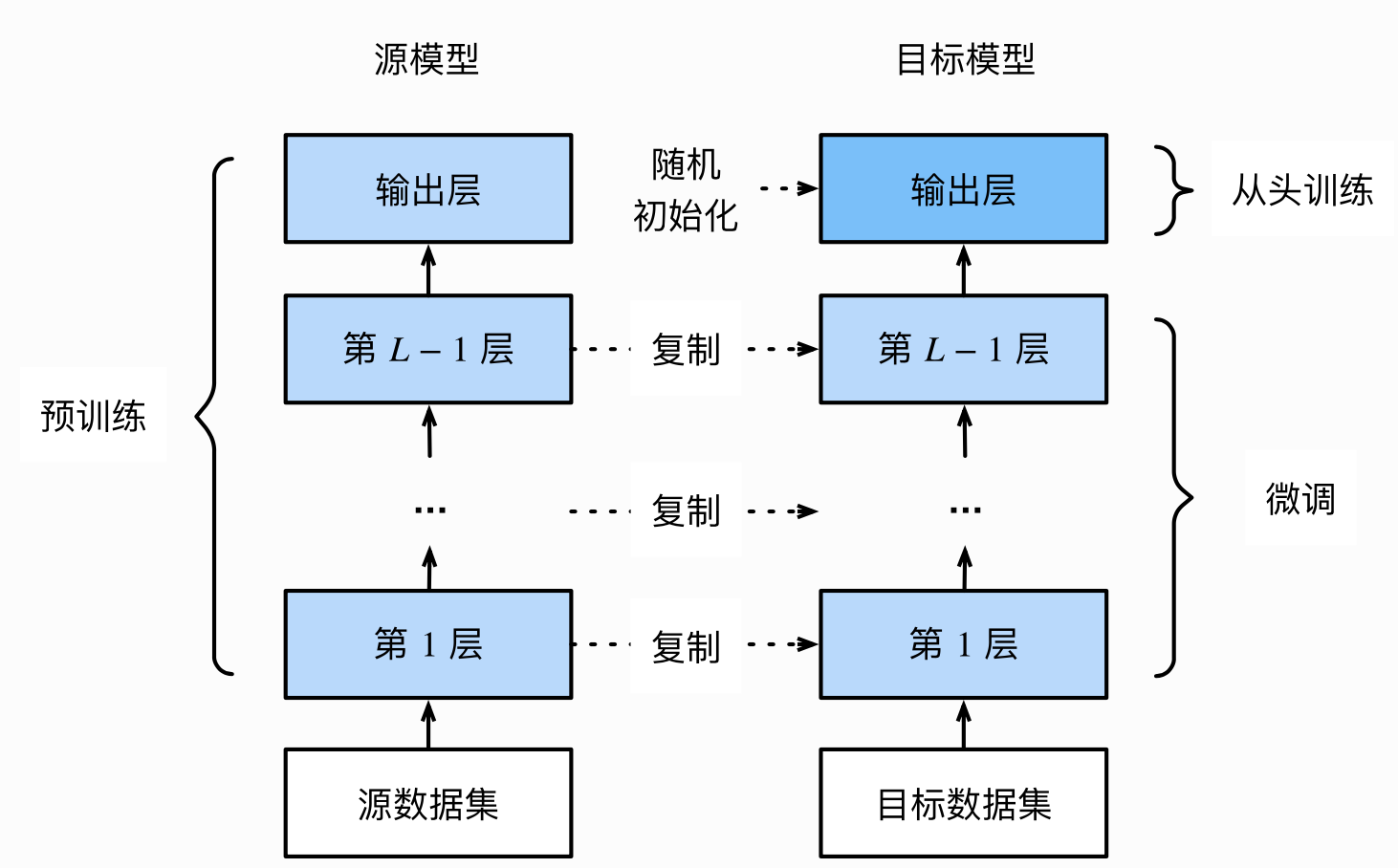
模型微调的流程
- 在源数据集上预训练一个神经网络模型,即源模型
- 创建一个新的神经网络模型,即目标模型,该模型复制了源模型上除输出层外的所有模型设计和参数
- 给目标模型添加一个输出大小为目标数据集类别个数的输出层,并随机初始化改成的模型参数
- 使用目标数据集训练目标模型
-
使用已有模型结构:通过传入
pretrained参数,决定是否使用预训练好的权重 -
训练特定层:使用
requires_grad=False冻结部分网络层,只计算新初始化的层的梯度def set_parameter_requires_grad(model, feature_extracting): if feature_extracting:for param in model.parameters():param.requires_grad = False
import torchvision.models as models
冻结参数的梯度
feature_extract = True
model = models.resnet50(pretrained=True)
set_parameter_requires_grad(model, feature_extract)
修改模型
num_ftrs = model.fc.in_features
model.fc = nn.Linear(in_features=512, out_features=4, bias=True)
model.fc
Linear(in_features=512, out_features=4, bias=True)
```
注:在训练过程中,model仍会回传梯度,但是参数更新只会发生在`fc`层。
4 半精度训练
-
半精度优势:减少显存占用,提高GPU同时加载的数据量
-
设置半精度训练:
- 导入
torch.cuda.amp的autocast包 - 在模型定义中的
forward函数上,设置autocast装饰器 - 在训练过程中,在数据输入模型之后,添加
with autocast()
- 导入
-
适用范围:适用于数据的size较大的数据集(比如3D图像、视频等)
5 总结
- 自定义损失函数可以通过二种方式:函数方式和类方式,建议全程使用PyTorch提供的张量计算方法。
- 通过使用PyTorch中的scheduler动态调整学习率,也支持自定义scheduler
- 模型微调主要使用已有的预训练模型,调整其中的参数构建目标模型,在目标数据集上训练模型。
- 半精度训练主要适用于数据的size较大的数据集(比如3D图像、视频等)。
PyTorch学习笔记(七):PyTorch可视化_
1 可视化网络结构
- 打印模型基础信息:使用
print()函数,只能打印出基础构件的信息,不能显示每一层的shape和对应参数量的大小
import torchvision.models as modelsmodel = models.resnet18()
print(model)
ResNet((conv1): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3), bias=False)(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace=True)(maxpool): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False)(layer1): Sequential((0): BasicBlock((conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace=True)(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True))(1): BasicBlock((conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace=True)(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)))(layer2): Sequential((0): BasicBlock((conv1): Conv2d(64, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace=True)(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(downsample): Sequential((0): Conv2d(64, 128, kernel_size=(1, 1), stride=(2, 2), bias=False)(1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)))(1): BasicBlock((conv1): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace=True)(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)))(layer3): Sequential((0): BasicBlock((conv1): Conv2d(128, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace=True)(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(downsample): Sequential((0): Conv2d(128, 256, kernel_size=(1, 1), stride=(2, 2), bias=False)(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)))(1): BasicBlock((conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace=True)(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)))(layer4): Sequential((0): BasicBlock((conv1): Conv2d(256, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace=True)(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(downsample): Sequential((0): Conv2d(256, 512, kernel_size=(1, 1), stride=(2, 2), bias=False)(1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)))(1): BasicBlock((conv1): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)(relu): ReLU(inplace=True)(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)))(avgpool): AdaptiveAvgPool2d(output_size=(1, 1))(fc): Linear(in_features=512, out_features=1000, bias=True)
)
- 可视化网络结构:使用
torchinfo库进行模型网络的结构输出,可以得到更加详细的信息,包括模块信息(每一层的类型、输出shape和参数量)、模型整体的参数量、模型大小、一次前向或者反向传播需要的内存大小等
import torchvision.models as models
from torchinfo import summaryresnet18 = models.resnet18() # 实例化模型
# 其中batch_size为1,图片的通道数为3,图片的高宽为224
summary(model, (1, 3, 224, 224))
==========================================================================================
Layer (type:depth-idx) Output Shape Param #
==========================================================================================
ResNet -- --
├─Conv2d: 1-1 [1, 64, 112, 112] 9,408
├─BatchNorm2d: 1-2 [1, 64, 112, 112] 128
├─ReLU: 1-3 [1, 64, 112, 112] --
├─MaxPool2d: 1-4 [1, 64, 56, 56] --
├─Sequential: 1-5 [1, 64, 56, 56] --
│ └─BasicBlock: 2-1 [1, 64, 56, 56] --
│ │ └─Conv2d: 3-1 [1, 64, 56, 56] 36,864
│ │ └─BatchNorm2d: 3-2 [1, 64, 56, 56] 128
│ │ └─ReLU: 3-3 [1, 64, 56, 56] --
│ │ └─Conv2d: 3-4 [1, 64, 56, 56] 36,864
│ │ └─BatchNorm2d: 3-5 [1, 64, 56, 56] 128
│ │ └─ReLU: 3-6 [1, 64, 56, 56] --
│ └─BasicBlock: 2-2 [1, 64, 56, 56] --
│ │ └─Conv2d: 3-7 [1, 64, 56, 56] 36,864
│ │ └─BatchNorm2d: 3-8 [1, 64, 56, 56] 128
│ │ └─ReLU: 3-9 [1, 64, 56, 56] --
│ │ └─Conv2d: 3-10 [1, 64, 56, 56] 36,864
│ │ └─BatchNorm2d: 3-11 [1, 64, 56, 56] 128
│ │ └─ReLU: 3-12 [1, 64, 56, 56] --
├─Sequential: 1-6 [1, 128, 28, 28] --
│ └─BasicBlock: 2-3 [1, 128, 28, 28] --
│ │ └─Conv2d: 3-13 [1, 128, 28, 28] 73,728
│ │ └─BatchNorm2d: 3-14 [1, 128, 28, 28] 256
│ │ └─ReLU: 3-15 [1, 128, 28, 28] --
│ │ └─Conv2d: 3-16 [1, 128, 28, 28] 147,456
│ │ └─BatchNorm2d: 3-17 [1, 128, 28, 28] 256
│ │ └─Sequential: 3-18 [1, 128, 28, 28] 8,448
│ │ └─ReLU: 3-19 [1, 128, 28, 28] --
│ └─BasicBlock: 2-4 [1, 128, 28, 28] --
│ │ └─Conv2d: 3-20 [1, 128, 28, 28] 147,456
│ │ └─BatchNorm2d: 3-21 [1, 128, 28, 28] 256
│ │ └─ReLU: 3-22 [1, 128, 28, 28] --
│ │ └─Conv2d: 3-23 [1, 128, 28, 28] 147,456
│ │ └─BatchNorm2d: 3-24 [1, 128, 28, 28] 256
│ │ └─ReLU: 3-25 [1, 128, 28, 28] --
├─Sequential: 1-7 [1, 256, 14, 14] --
│ └─BasicBlock: 2-5 [1, 256, 14, 14] --
│ │ └─Conv2d: 3-26 [1, 256, 14, 14] 294,912
│ │ └─BatchNorm2d: 3-27 [1, 256, 14, 14] 512
│ │ └─ReLU: 3-28 [1, 256, 14, 14] --
│ │ └─Conv2d: 3-29 [1, 256, 14, 14] 589,824
│ │ └─BatchNorm2d: 3-30 [1, 256, 14, 14] 512
│ │ └─Sequential: 3-31 [1, 256, 14, 14] 33,280
│ │ └─ReLU: 3-32 [1, 256, 14, 14] --
│ └─BasicBlock: 2-6 [1, 256, 14, 14] --
│ │ └─Conv2d: 3-33 [1, 256, 14, 14] 589,824
│ │ └─BatchNorm2d: 3-34 [1, 256, 14, 14] 512
│ │ └─ReLU: 3-35 [1, 256, 14, 14] --
│ │ └─Conv2d: 3-36 [1, 256, 14, 14] 589,824
│ │ └─BatchNorm2d: 3-37 [1, 256, 14, 14] 512
│ │ └─ReLU: 3-38 [1, 256, 14, 14] --
├─Sequential: 1-8 [1, 512, 7, 7] --
│ └─BasicBlock: 2-7 [1, 512, 7, 7] --
│ │ └─Conv2d: 3-39 [1, 512, 7, 7] 1,179,648
│ │ └─BatchNorm2d: 3-40 [1, 512, 7, 7] 1,024
│ │ └─ReLU: 3-41 [1, 512, 7, 7] --
│ │ └─Conv2d: 3-42 [1, 512, 7, 7] 2,359,296
│ │ └─BatchNorm2d: 3-43 [1, 512, 7, 7] 1,024
│ │ └─Sequential: 3-44 [1, 512, 7, 7] 132,096
│ │ └─ReLU: 3-45 [1, 512, 7, 7] --
│ └─BasicBlock: 2-8 [1, 512, 7, 7] --
│ │ └─Conv2d: 3-46 [1, 512, 7, 7] 2,359,296
│ │ └─BatchNorm2d: 3-47 [1, 512, 7, 7] 1,024
│ │ └─ReLU: 3-48 [1, 512, 7, 7] --
│ │ └─Conv2d: 3-49 [1, 512, 7, 7] 2,359,296
│ │ └─BatchNorm2d: 3-50 [1, 512, 7, 7] 1,024
│ │ └─ReLU: 3-51 [1, 512, 7, 7] --
├─AdaptiveAvgPool2d: 1-9 [1, 512, 1, 1] --
├─Linear: 1-10 [1, 1000] 513,000
==========================================================================================
Total params: 11,689,512
Trainable params: 11,689,512
Non-trainable params: 0
Total mult-adds (G): 1.81
==========================================================================================
Input size (MB): 0.60
Forward/backward pass size (MB): 39.75
Params size (MB): 46.76
Estimated Total Size (MB): 87.11
==========================================================================================
Copy to clipboardErrorCopied
2 CNN可视化
- CNN卷积核可视化
model = models.vgg11(pretrained=True)
dict(model.features.named_children())
{'0': Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),'1': ReLU(inplace=True),'2': MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False),'3': Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),'4': ReLU(inplace=True),'5': MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False),'6': Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),'7': ReLU(inplace=True),'8': Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),'9': ReLU(inplace=True),'10': MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False),'11': Conv2d(256, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),'12': ReLU(inplace=True),'13': Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),'14': ReLU(inplace=True),'15': MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False),'16': Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),'17': ReLU(inplace=True),'18': Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),'19': ReLU(inplace=True),'20': MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)}
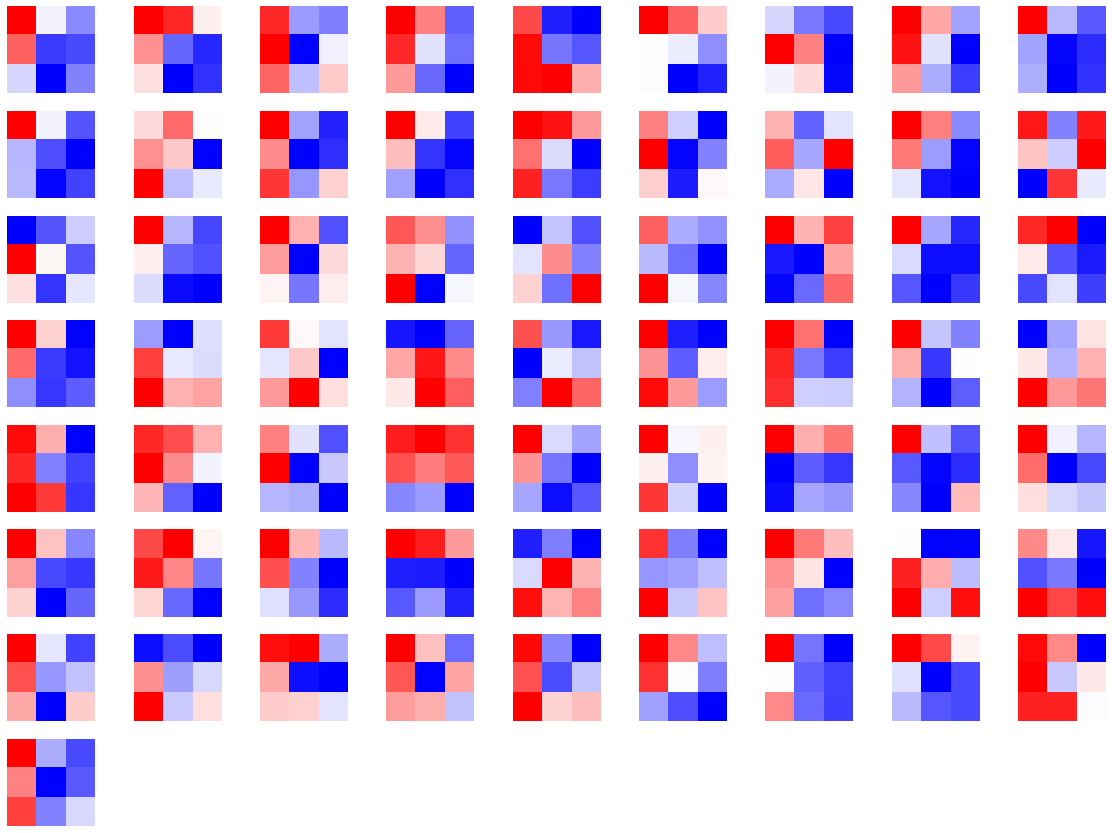
import matplotlib.pyplot as pltconv1 = dict(model.features.named_children())['3']
# 得到第3层的卷积层参数
kernel_set = conv1.weight.detach()
num = len(conv1.weight.detach())
print(kernel_set.shape)
# 该代码仅可视化其中一个维度的卷积核,第3层的卷积核有128*64个
for i in range(0, 1):i_kernel = kernel_set[i]plt.figure(figsize=(20, 17))if (len(i_kernel)) > 1:for idx, filer in enumerate(i_kernel):plt.subplot(9, 9, idx+1) plt.axis('off')plt.imshow(filer[ :, :].detach(),cmap='bwr')
torch.Size([128, 64, 3, 3])
-
CNN特征图可视化:使用PyTorch提供的hook结构,得到网络在前向传播过程中的特征图。
-
CNN class activation map可视化:用于在CNN可视化场景下,判断图像中哪些像素点对预测结果是重要的,可使用
grad-cam库进行操作 -
使用FlashTorch快速实现CNDD可视化:可以使用
flashtorch库,可视化梯度和卷积核
3 使用TensorBoard可视化训练过程
-
可视化基本逻辑:TensorBoard记录模型每一层的feature map、权重和训练loss等,并保存在用户指定的文件夹中,通过网页形式进行可视化展示
-
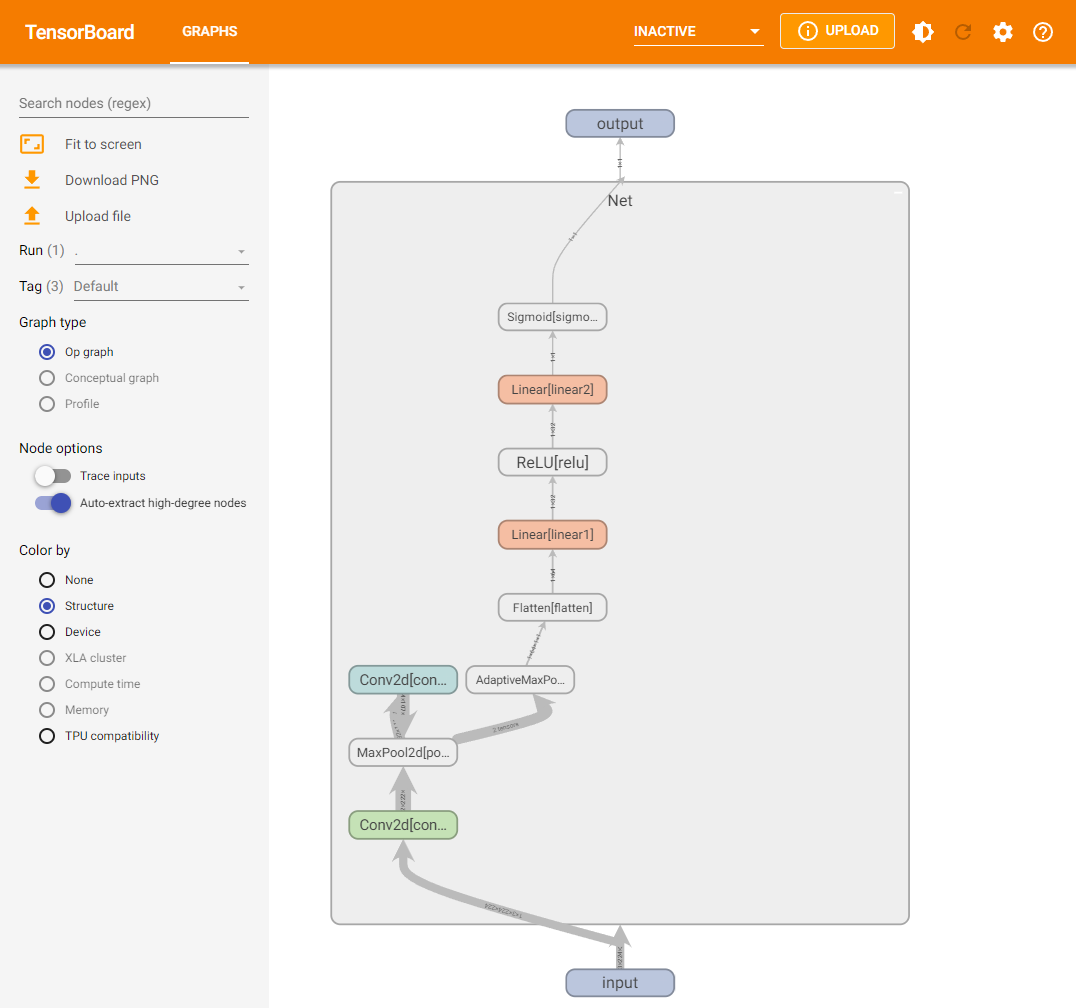
模型结构可视化:使用
add_graph方法,在TensorBoard下展示模型结构
import torch.nn as nnclass Net(nn.Module):def __init__(self):super(Net, self).__init__()self.conv1 = nn.Conv2d(in_channels=3,out_channels=32,kernel_size = 3)self.pool = nn.MaxPool2d(kernel_size = 2,stride = 2)self.conv2 = nn.Conv2d(in_channels=32,out_channels=64,kernel_size = 5)self.adaptive_pool = nn.AdaptiveMaxPool2d((1,1))self.flatten = nn.Flatten()self.linear1 = nn.Linear(64,32)self.relu = nn.ReLU()self.linear2 = nn.Linear(32,1)self.sigmoid = nn.Sigmoid()def forward(self,x):x = self.conv1(x)x = self.pool(x)x = self.conv2(x)x = self.pool(x)x = self.adaptive_pool(x)x = self.flatten(x)x = self.linear1(x)x = self.relu(x)x = self.linear2(x)y = self.sigmoid(x)return y
model = Net()
print(model)Net((conv1): Conv2d(3, 32, kernel_size=(3, 3), stride=(1, 1))(pool): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)(conv2): Conv2d(32, 64, kernel_size=(5, 5), stride=(1, 1))(adaptive_pool): AdaptiveMaxPool2d(output_size=(1, 1))(flatten): Flatten(start_dim=1, end_dim=-1)(linear1): Linear(in_features=64, out_features=32, bias=True)(relu): ReLU()(linear2): Linear(in_features=32, out_features=1, bias=True)(sigmoid): Sigmoid()
)
from torch.utils.tensorboard import SummaryWriterwriter = SummaryWriter('./runs')
writer.add_graph(model, input_to_model = torch.rand(1, 3, 224, 224))
writer.close()
在当前目录下,执行tensorboard --logdir=./runs命令,打开TensorBoard可视化页面,看到模型网络结构。
-
图像可视化:
- 对于单张图片的显示使用
add_image - 对于多张图片的显示使用
add_images - 有时需要使用
torchvision.utils.make_grid将多张图片拼成一张图片后,用writer.add_image显示
- 对于单张图片的显示使用
-
连续变量可视化:使用
add_scalar方法,对连续变量(或时序变量)的变化过程进行可视化展示
for i in range(500):x = iy = x ** 2writer.add_scalar("x", x, i) #日志中记录x在第step i 的值writer.add_scalar("y", y, i) #日志中记录y在第step i 的值
writer.close()
Copy to clipboardErrorCopied
- 参数分布可视化:使用
add_histogram方法,对参数(或变量)的分布进行可视化展示
import numpy as np# 创建正态分布的张量模拟参数矩阵
def norm(mean, std):t = std * torch.randn((100, 20)) + meanreturn tfor step, mean in enumerate(range(-10, 10, 1)):w = norm(mean, 1)writer.add_histogram("w", w, step)writer.flush()
writer.close()
Copy to clipboardErrorCopied
4 总结
本次任务,主要介绍了PyTorch可视化,包括可视化网络结构、CNN卷积层可视化和使用TensorBoard可视化训练过程。
- 使用
torchinfo库,可视化模型网络结构,展示模块信息(每一层的类型、输出shape和参数量)、模型整体的参数量、模型大小、一次前向或者反向传播需要的内存大小等。 - 使用
grad-cam库,可视化重要像素点,能够快速确定重要区域,进行可解释性分析或模型优化改进。 - 通过
TensorBoard工具,调用相关方法创建训练记录,可视化模型结构、图像、连续变量和参数分布等。
PyTorch学习笔记(八):PyTorch生态简介
一、 torchvision(图像)
1.torchvision.datasets:
计算机视觉领域常见的数据集,包括CIFAR、EMNIST、Fashion-MNIST等
torchvision.datasets主要包含了一些我们在计算机视觉中常见的数据集,在0.10.0版本的torchvision下,有以下的数据集:
| Caltech | CelebA | CIFAR | Cityscapes |
|---|---|---|---|
| EMNIST | FakeData | Fashion-MNIST | Flickr |
| ImageNet | Kinetics-400 | KITTI | KMNIST |
| PhotoTour | Places365 | QMNIST | SBD |
| SEMEION | STL10 | SVHN | UCF101 |
| VOC | WIDERFace |
2.torchvision.transforms:
数据预处理方法,可以进行图片数据的放大、缩小、水平或垂直翻转等
from torchvision import transforms
data_transform = transforms.Compose([transforms.ToPILImage(), # 这一步取决于后续的数据读取方式,如果使用内置数据集则不需要transforms.Resize(image_size),transforms.ToTensor()
])
3.torchvision.models:
预训练模型,包括图像分类、语义分割、物体检测、实例分割、人体关键点检测、视频分类等模型
为了提高训练效率,减少不必要的重复劳动,PyTorch官方也提供了一些预训练好的模型供我们使用,可以点击这里进行查看现在有哪些预训练模型,下面我们将对如何使用这些模型进行详细介绍。 此处我们以torchvision0.10.0 为例,如果希望获取更多的预训练模型,可以使用使用pretrained-models.pytorch仓库。现有预训练好的模型可以分为以下几类:
- Classification
在图像分类里面,PyTorch官方提供了以下模型,并正在不断增多。
| AlexNet | VGG | ResNet | SqueezeNet |
|---|---|---|---|
| DenseNet | Inception v3 | GoogLeNet | ShuffleNet v2 |
| MobileNetV2 | MobileNetV3 | ResNext | Wide ResNet |
| MNASNet | EfficientNet | RegNet | 持续更新 |
这些模型是在ImageNet-1k进行预训练好的,具体的使用我们会在后面进行介绍。除此之外,我们也可以点击这里去查看这些模型在ImageNet-1k的准确率。
- Semantic Segmentation
语义分割的预训练模型是在COCO train2017的子集上进行训练的,提供了20个类别,包括background, aeroplane, bicycle, bird, boat, bottle, bus, car, cat, chair, cow, diningtable, dog, horse, motorbike, person, pottedplant, sheep, sofa,train, tvmonitor。
| FCN ResNet50 | FCN ResNet101 | DeepLabV3 ResNet50 | DeepLabV3 ResNet101 |
|---|---|---|---|
| LR-ASPP MobileNetV3-Large | DeepLabV3 MobileNetV3-Large | 未完待续 |
具体我们可以点击这里进行查看预训练的模型的mean IOU和global pixelwise acc
- Object Detection,instance Segmentation and Keypoint Detection
物体检测,实例分割和人体关键点检测的模型我们同样是在COCO train2017进行训练的,在下方我们提供了实例分割的类别和人体关键点检测类别:
COCO_INSTANCE_CATEGORY_NAMES = [
‘background’, ‘person’, ‘bicycle’, ‘car’, ‘motorcycle’, ‘airplane’, ‘bus’,‘train’, ‘truck’, ‘boat’, ‘traffic light’, ‘fire hydrant’, ‘N/A’, ‘stop sign’, ‘parking meter’, ‘bench’, ‘bird’, ‘cat’, ‘dog’, ‘horse’, ‘sheep’, ‘cow’, ‘elephant’, ‘bear’, ‘zebra’, ‘giraffe’, ‘N/A’, ‘backpack’, ‘umbrella’, ‘N/A’, ‘N/A’,‘handbag’, ‘tie’, ‘suitcase’, ‘frisbee’, ‘skis’, ‘snowboard’, ‘sports ball’,‘kite’, ‘baseball bat’, ‘baseball glove’, ‘skateboard’, ‘surfboard’, ‘tennis racket’,‘bottle’, ‘N/A’, ‘wine glass’, ‘cup’, ‘fork’, ‘knife’, ‘spoon’, ‘bowl’,‘banana’, ‘apple’, ‘sandwich’, ‘orange’, ‘broccoli’, ‘carrot’, ‘hot dog’, ‘pizza’,‘donut’, ‘cake’, ‘chair’, ‘couch’, ‘potted plant’, ‘bed’, ‘N/A’, ‘dining table’,‘N/A’, ‘N/A’, ‘toilet’, ‘N/A’, ‘tv’, ‘laptop’, ‘mouse’, ‘remote’, ‘keyboard’, ‘cell phone’,‘microwave’, ‘oven’, ‘toaster’, ‘sink’, ‘refrigerator’, ‘N/A’, ‘book’,‘clock’, ‘vase’, ‘scissors’, ‘teddy bear’, ‘hair drier’, ‘toothbrush’]
COCO_PERSON_KEYPOINT_NAMES =[‘nose’,‘left_eye’,‘right_eye’,‘left_ear’,‘right_ear’,‘left_shoulder’,‘right_shoulder’,‘left_elbow’,‘right_elbow’,‘left_wrist’,‘right_wrist’,‘left_hip’,‘right_hip’,‘left_knee’,‘right_knee’,‘left_ankle’,‘right_ankle’]
| Faster R-CNN | Mask R-CNN | RetinaNet | SSDlite |
|---|---|---|---|
| SSD | 未完待续 |
同样的,我们可以点击这里查看这些模型在COCO train 2017上的box AP,keypoint AP,mask AP
- Video classification
视频分类模型是在 Kinetics-400上进行预训练的
| ResNet 3D 18 | ResNet MC 18 | ResNet (2+1) D |
|---|---|---|
| 未完待续 |
同样我们也可以点击这里查看这些模型的。
4.torchvision.io:
视频、图片和文件的IO操作,包括读取、写入、编解码处理等
5.torchvision.ops:
计算机视觉的特定操作,包括但不仅限于NMS,RoIAlign(MASK R-CNN中应用的一种方法),RoIPool(Fast R-CNN中用到的一种方法)
6.torchvision.utils:
图片拼接、可视化检测和分割等操作
torchvision.utils 为我们提供了一些可视化的方法,可以帮助我们将若干张图片拼接在一起、可视化检测和分割的效果。具体方法可以点击这里进行查看。
总的来说,torchvision的出现帮助我们解决了常见的计算机视觉中一些重复且耗时的工作,并在数据集的获取、数据增强、模型预训练等方面大大降低了我们的工作难度,可以让我们更加快速上手一些计算机视觉任务。
2 PyTorchVideo(视频)
-
简介:PyTorchVideo是一个专注于视频理解工作的深度学习库,提供加速视频理解研究所需的可重用、模块化和高效的组件,使用PyTorch开发,支持不同的深度学习视频组件,如视频模型、视频数据集和视频特定转换。
-
特点:基于PyTorch,提供Model Zoo,支持数据预处理和常见数据,采用模块化设计,支持多模态,优化移动端部署
-
使用方式:TochHub、PySlowFast、PyTorch Lightning
3 torchtext(文本)
torchtext的主要组成部分
torchtext可以方便的对文本进行预处理,例如截断补长、构建词表等。torchtext主要包含了以下的主要组成部分:
- 数据处理工具 torchtext.data.functional、torchtext.data.utils
- 数据集 torchtext.data.datasets
- 词表工具 torchtext.vocab
- 评测指标 torchtext.metrics
-
简介:torchtext是PyTorch的自然语言处理(NLP)的工具包,可对文本进行预处理,例如截断补长、构建词表等操作
-
构建数据集:使用
Field类定义不同类型的数据 -
评测指标:使用
torchtext.data.metrics下的方法,对NLP任务进行评测
本节参考
- torchtext官方文档
- atnlp/torchtext-summary
transforms实战
from PIL import Image
from torchvision import transforms
import matplotlib.pyplot as plt
%matplotlib inline
# 加载原始图片
img = Image.open("./lenna.jpg")
print(img.size)
plt.imshow(img)
## transforms.CenterCrop(size)
# 对给定图片进行沿中心切割
# 对图片沿中心放大切割,超出图片大小的部分填0
img_centercrop1 = transforms.CenterCrop((500,500))(img)
print(img_centercrop1.size)
# 对图片沿中心缩小切割,超出期望大小的部分剔除
img_centercrop2 = transforms.CenterCrop((224,224))(img)
print(img_centercrop2.size)
plt.subplot(1,3,1),plt.imshow(img),plt.title("Original")
plt.subplot(1,3,2),plt.imshow(img_centercrop1),plt.title("500 * 500")
plt.subplot(1,3,3),plt.imshow(img_centercrop2),plt.title("224 * 224")
plt.show()
## transforms.ColorJitter(brightness=0, contrast=0, saturation=0, hue=0)
# 对图片的亮度,对比度,饱和度,色调进行改变
img_CJ = transforms.ColorJitter(brightness=1,contrast=0.5,saturation=0.5,hue=0.5)(img)
print(img_CJ.size)
plt.imshow(img_CJ)
## transforms.Grayscale(num_output_channels)
img_grey_c3 = transforms.Grayscale(num_output_channels=3)(img)
img_grey_c1 = transforms.Grayscale(num_output_channels=1)(img)
plt.subplot(1,2,1),plt.imshow(img_grey_c3),plt.title("channels=3")
plt.subplot(1,2,2),plt.imshow(img_grey_c1),plt.title("channels=1")
plt.show()
## transforms.Resize
# 等比缩放
img_resize = transforms.Resize(224)(img)
print(img_resize.size)
plt.imshow(img_resize)
## transforms.Scale
# 等比缩放 不推荐使用此转换以支持调整大小
img_scale = transforms.Scale(224)(img)
print(img_scale.size)
plt.imshow(img_scale)
## transforms.RandomCrop
# 随机裁剪成指定大小
# 设立随机种子
import torch
torch.manual_seed(31)
# 随机裁剪
img_randowm_crop1 = transforms.RandomCrop(224)(img)
img_randowm_crop2 = transforms.RandomCrop(224)(img)
print(img_randowm_crop1.size)
plt.subplot(1,2,1),plt.imshow(img_randowm_crop1)
plt.subplot(1,2,2),plt.imshow(img_randowm_crop2)
plt.show()
## transforms.RandomHorizontalFlip
# 随机左右旋转
# 设立随机种子,可能不旋转
import torch
torch.manual_seed(31)img_random_H = transforms.RandomHorizontalFlip()(img)
print(img_random_H.size)
plt.imshow(img_random_H)
## transforms.RandomVerticalFlip
# 随机垂直方向旋转
img_random_V = transforms.RandomVerticalFlip()(img)
print(img_random_V.size)
plt.imshow(img_random_V)
## transforms.RandomResizedCrop
# 随机裁剪成指定大小
img_random_resizecrop = transforms.RandomResizedCrop(224,scale=(0.5,0.5))(img)
print(img_random_resizecrop.size)
plt.imshow(img_random_resizecrop)
## 对图片进行组合变化 tranforms.Compose()
# 对一张图片的操作可能是多种的,我们使用transforms.Compose()将他们组装起来
transformer = transforms.Compose([transforms.Resize(256),transforms.transforms.RandomResizedCrop((224), scale = (0.5,1.0)),transforms.RandomVerticalFlip(),
])
img_transform = transformer(img)
plt.imshow(img_transform)
相关文章:
PyTorch学习笔记
PyTorch学习笔记(一):PyTorch环境安装 往期学习资料推荐: 1.Pytorch实战笔记_GoAI的博客-CSDN博客 2.Pytorch入门教程_GoAI的博客-CSDN博客 安装参考: 1.视频教程:3分钟深度学习【环境搭建】CUDA Anacon…...
SpringBoot2知识点记录
SpringBoot2知识点记录1.SpringBoot2基础入门1.1 环境要求1.1.1 maven设置1.2 第一个程序 HelloWorld1.2.1 创建maven工程1.2.2 引入依赖1.2.3 创建主程序1.2.4 编写业务1.2.5 测试1.2.6 简化配置1.2.7 简化部署1.3 自动装配1.3.1 SpringBoot特点1.3.1.1 依赖管理1.3.1.2 自动装…...
Mysql
1 Sql编写 count(*) //是对行数目进行计数 count(column_name) //是对列中不为空的行进行计数 SELECT COUNT( DISTINCT id ) FROM tablename; //计算表中id不同的记录有多少条 SELECT DISTINCT id, type FROM tablename; //返回表中id与type同时不同的结果 X.1 连表子查询 sel…...

Q4营收利润增长背后估值持续偏低,全球支付巨头PayPal前景如何?
作为国际版的“支付宝”,全球第三方支付巨头PayPal的业务横跨欧美市场,覆盖了全球200多个国家和地区。同时,PayPal也是首家进军中国支付市场的外资机构,实力强劲。然而,近两年,PayPal的市值一路从3000亿跌至…...
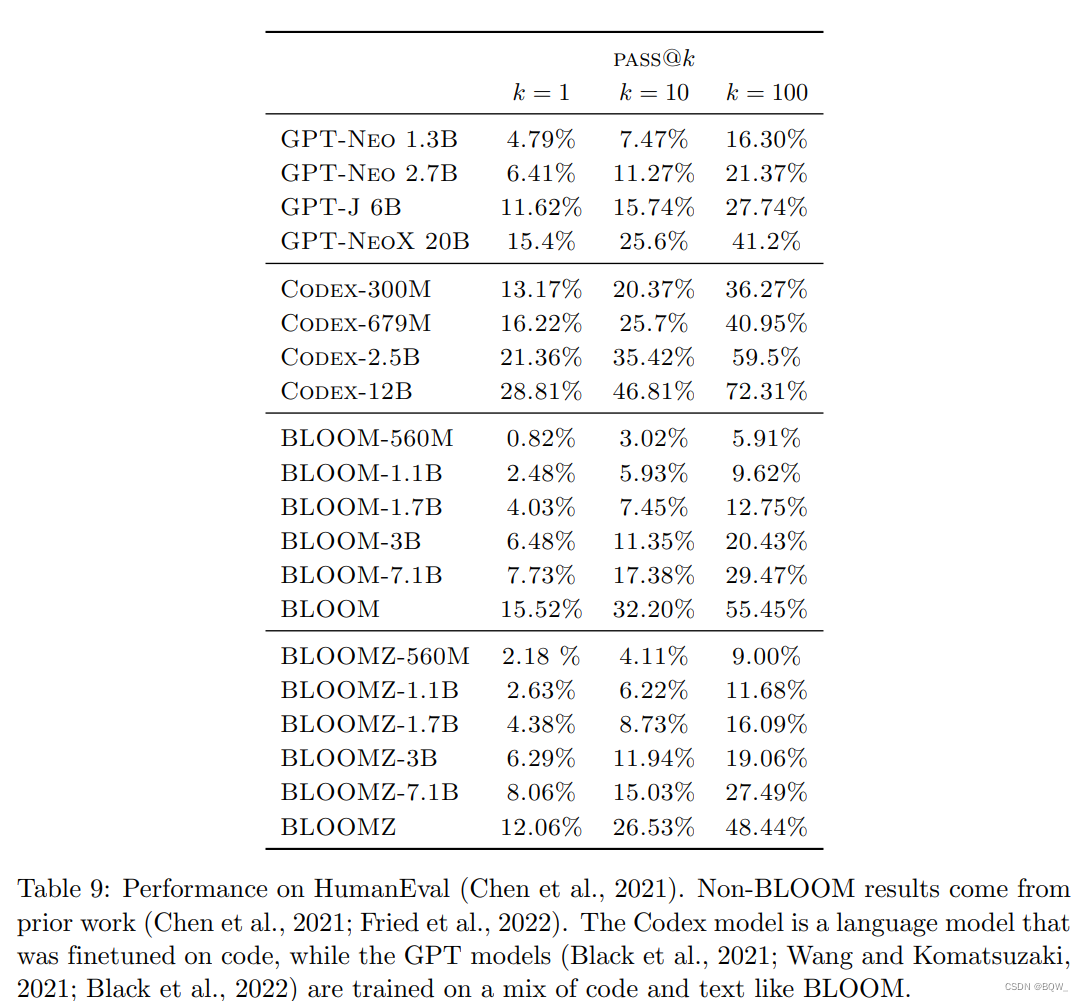
【自然语言处理】【大模型】BLOOM:一个176B参数且可开放获取的多语言模型
BLOOM:一个176B参数且可开放获取的多语言模型《BLOOM: A 176B-Parameter Open-Access Multilingual Language Model》论文地址:https://arxiv.org/pdf/2211.05100.pdf 相关博客 【自然语言处理】【大模型】用于大型Transformer的8-bit矩阵乘法介绍 【自然…...
小红书穿搭博主推广费用是多少?
小红书作为一个种草属性非常强的平台,商业价值是有目共睹的。很多爱美的女性都会在小红书上被种草某个商品,所以很多服装品牌都会在小红书上布局推广。 穿搭作为小红书的顶梁柱类目,刷小红书就能总是看到好看的穿搭博主分享美美的衣服&#…...
网络安全-PHPstudy环境搭建
网络安全-PHPstudy环境搭建 网络搭建我是专家,安全我懂的不多,所以可能很基础。。因为我自己都不懂,都是跟着课程学的 PHPstudy 这个东东是一个在windwos下可以快速部署的web开发环境,安装了就能用,也支持iis和ngin…...
)
operator的两种用法(重载和隐式类型转换)
文章目录重载隐式类型转换构造函数的隐式类型转换补充operator算子的隐式类型转换重载 略 隐式类型转换 构造函数的隐式类型转换 利用operator进行的隐式类型转换成为operator算子的隐式类型转换,讲这个之前先了解构造函数的隐式类型转换,请看以下代…...

vue常用指令
介绍 vue是以数据驱动和组件化开发为核心的前端框架,可以快速搭建前端应用 常用指令 指令:页面数据的操作(以数据去驱动DOM) <div v-xxx""></div>v-if:做元素的插入(append&…...
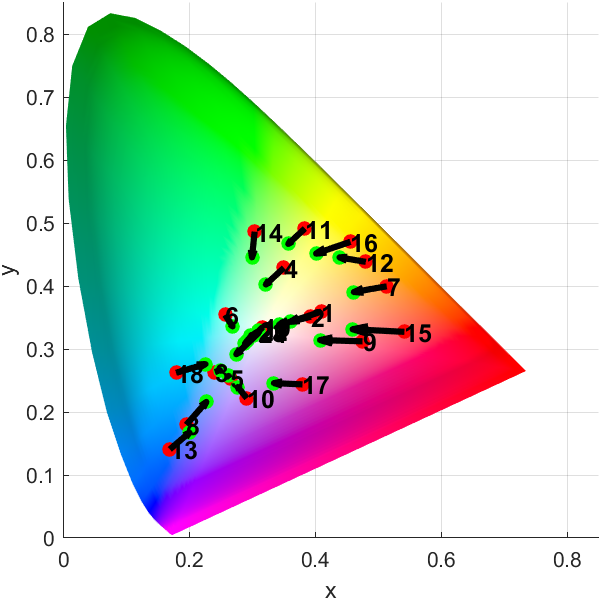
MATLAB | 有关数值矩阵、颜色图及颜色列表的技巧整理
这是一篇有关数值矩阵、颜色矩阵、颜色列表的技巧整合,会以随笔的形式想到哪写到哪,可能思绪会比较飘逸请大家见谅,本文大体分为以下几个部分: 数值矩阵用颜色显示从颜色矩阵提取颜色从颜色矩阵中提取数据颜色列表相关函数颜色测…...
)
C++模板元编程详细教程(之九)
前序文章请看: C模板元编程详细教程(之一) C模板元编程详细教程(之二) C模板元编程详细教程(之三) C模板元编程详细教程(之四) C模板元编程详细教程(之五&…...
PhysioNet2017分类的代码实现
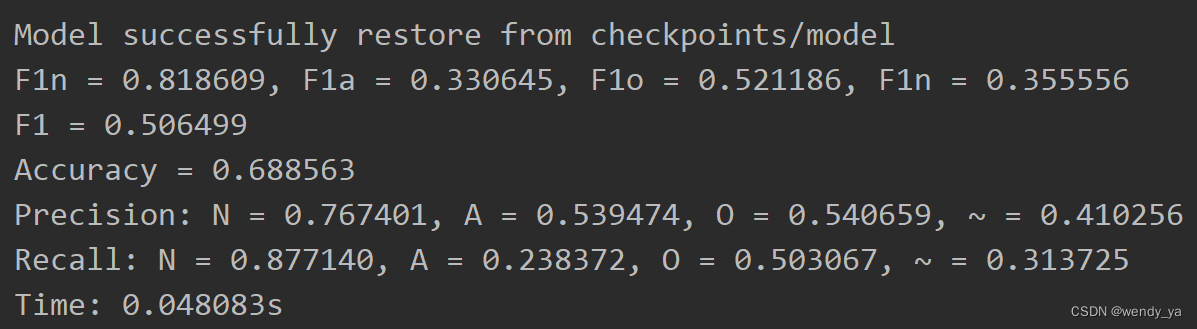
PhysioNet2017数据集介绍可参考文章:https://wendy.blog.csdn.net/article/details/128686196。本文主要介绍利用PhysioNet2017数据集对其进行分类的代码实现。 目录一、数据集预处理二、训练2.1 导入数据集并进行数据裁剪2.2 划分训练集、验证集和测试集2.3 设置训…...

正大期货本周财经大事抢先看
美国1月CPI、Fed 等央行官员谈话 美国1月超强劲的非农就业人口,让投资人开始上修对这波升息循环利率顶点的预测,也使本周二 (14 日) 的美国 1月 CPI 格外受关注。 介绍正大国际期货主账户对比国内期货的优势 第一点:权限都在主账户 例如…...

html+css综合练习一
文章目录一、小米注册页面1、要求2、案例图3、实现效果3.1、index.html3.2、style.css二、下午茶页面1、要求2、案例图3、index.html4、style.css三、法国巴黎页面1、要求2、案例图3、index.html4、style.css一、小米注册页面 1、要求 阅读下列说明、效果图,进行静…...
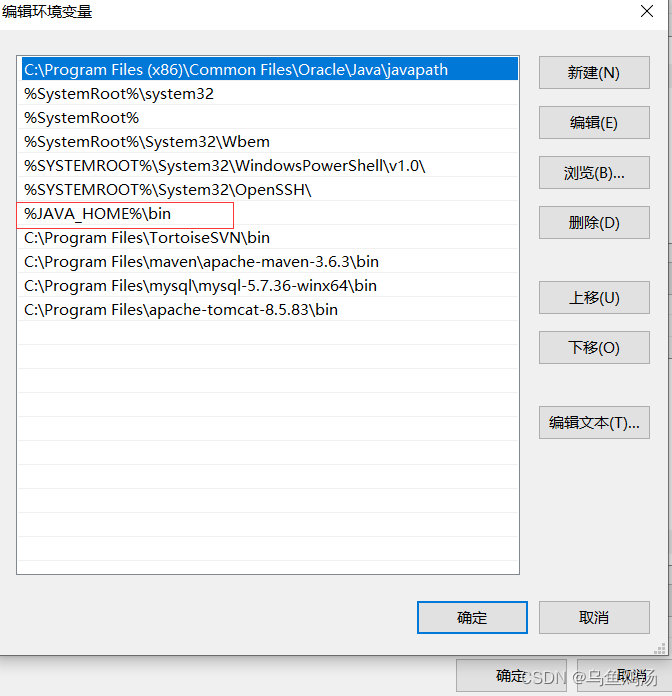
安装jdk8
目录标题一、下载地址(一)Linux下载(二)Win下载二、安装(一)Linux(二)Win三、卸载(一)Linux(二)Win一、下载地址 jdk8最新版 jdk8其他…...

二分法心得
原教程见labuladong 首先,我们建议左右区间全部用闭区间。那么第一个搜索区间:left0; rightlen-1; 进入while循环,结束条件是right<left。 然后求mid,如果nums[mid]的值比target大,说明target在左边,…...

Linux安装Docker完整教程
背景最近接手了几个项目,发现项目的部署基本上都是基于Docker的,幸亏在几年前已经熟悉的Docker的基本使用,没有抓瞎。这两年随着云原生的发展,Docker在云原生中的作用使得它也蓬勃发展起来。今天这篇文章就带大家一起实现一下在Li…...

备份基础知识
备份策略可包括:– 整个数据库(整个)– 部分数据库(部分)• 备份类型可指示包含以下项:– 所选文件中的所有数据块(完全备份)– 只限自以前某次备份以来更改过的信息(增量…...

C++学习记录——팔 内存管理
文章目录1、动态内存管理2、内存管理方式operator new operator delete3、new和delete的实现原理1、动态内存管理 C兼容C语言关于内存分配的语法,而添加了C独有的东西。 //int* p1 (int*)malloc(sizeof(int));int* p1 new int;new是一个操作符,C不再需…...

Spring事务失效原因分析解决
文章目录1、方法内部调用2、修饰符3、非运行时异常4、try…catch捕获异常5、多线程调用6、同时使用Transactional和Async7、错误使用事务传播行为8、使用的数据库不支持事务9、是否开启事务支持在工作中,经常会碰到一些事务失效的坑,基于遇到的情况&…...

Linux应用开发之网络套接字编程(实例篇)
服务端与客户端单连接 服务端代码 #include <sys/socket.h> #include <sys/types.h> #include <netinet/in.h> #include <stdio.h> #include <stdlib.h> #include <string.h> #include <arpa/inet.h> #include <pthread.h> …...

智能在线客服平台:数字化时代企业连接用户的 AI 中枢
随着互联网技术的飞速发展,消费者期望能够随时随地与企业进行交流。在线客服平台作为连接企业与客户的重要桥梁,不仅优化了客户体验,还提升了企业的服务效率和市场竞争力。本文将探讨在线客服平台的重要性、技术进展、实际应用,并…...
React19源码系列之 事件插件系统
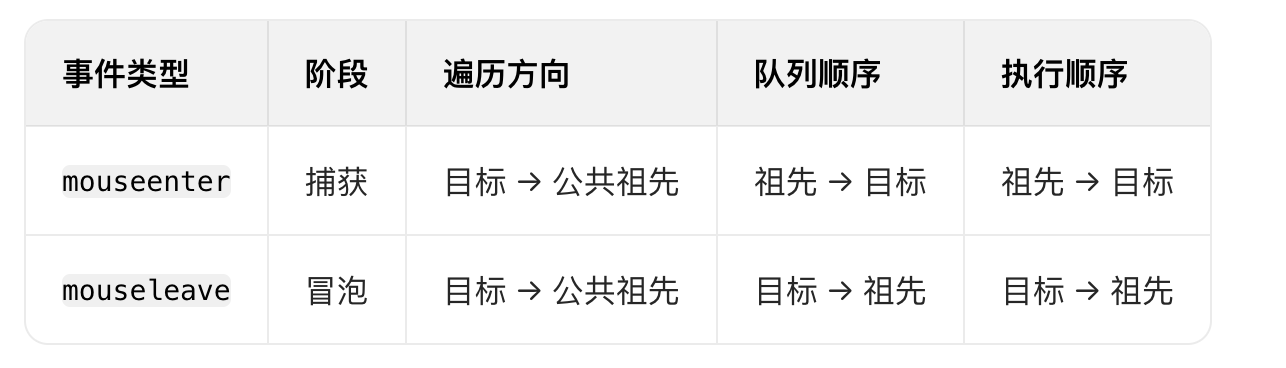
事件类别 事件类型 定义 文档 Event Event 接口表示在 EventTarget 上出现的事件。 Event - Web API | MDN UIEvent UIEvent 接口表示简单的用户界面事件。 UIEvent - Web API | MDN KeyboardEvent KeyboardEvent 对象描述了用户与键盘的交互。 KeyboardEvent - Web…...
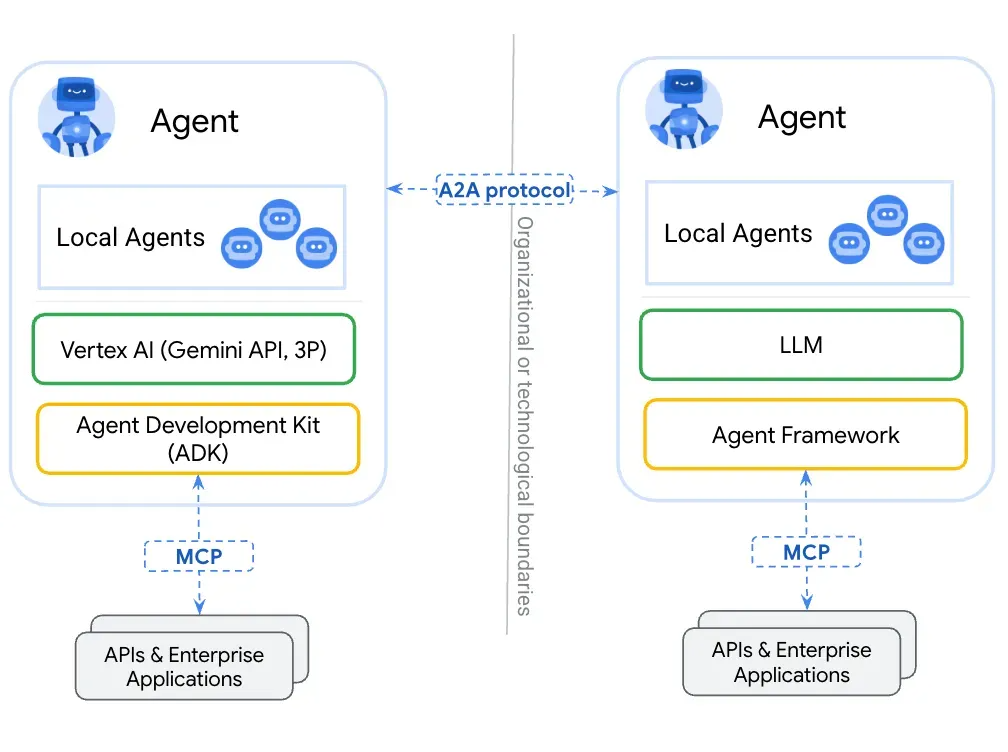
第一篇:Agent2Agent (A2A) 协议——协作式人工智能的黎明
AI 领域的快速发展正在催生一个新时代,智能代理(agents)不再是孤立的个体,而是能够像一个数字团队一样协作。然而,当前 AI 生态系统的碎片化阻碍了这一愿景的实现,导致了“AI 巴别塔问题”——不同代理之间…...

Linux云原生安全:零信任架构与机密计算
Linux云原生安全:零信任架构与机密计算 构建坚不可摧的云原生防御体系 引言:云原生安全的范式革命 随着云原生技术的普及,安全边界正在从传统的网络边界向工作负载内部转移。Gartner预测,到2025年,零信任架构将成为超…...

2025盘古石杯决赛【手机取证】
前言 第三届盘古石杯国际电子数据取证大赛决赛 最后一题没有解出来,实在找不到,希望有大佬教一下我。 还有就会议时间,我感觉不是图片时间,因为在电脑看到是其他时间用老会议系统开的会。 手机取证 1、分析鸿蒙手机检材&#x…...

PL0语法,分析器实现!
简介 PL/0 是一种简单的编程语言,通常用于教学编译原理。它的语法结构清晰,功能包括常量定义、变量声明、过程(子程序)定义以及基本的控制结构(如条件语句和循环语句)。 PL/0 语法规范 PL/0 是一种教学用的小型编程语言,由 Niklaus Wirth 设计,用于展示编译原理的核…...

Spring AI 入门:Java 开发者的生成式 AI 实践之路
一、Spring AI 简介 在人工智能技术快速迭代的今天,Spring AI 作为 Spring 生态系统的新生力量,正在成为 Java 开发者拥抱生成式 AI 的最佳选择。该框架通过模块化设计实现了与主流 AI 服务(如 OpenAI、Anthropic)的无缝对接&…...

laravel8+vue3.0+element-plus搭建方法
创建 laravel8 项目 composer create-project --prefer-dist laravel/laravel laravel8 8.* 安装 laravel/ui composer require laravel/ui 修改 package.json 文件 "devDependencies": {"vue/compiler-sfc": "^3.0.7","axios": …...

Xen Server服务器释放磁盘空间
disk.sh #!/bin/bashcd /run/sr-mount/e54f0646-ae11-0457-b64f-eba4673b824c # 全部虚拟机物理磁盘文件存储 a$(ls -l | awk {print $NF} | cut -d. -f1) # 使用中的虚拟机物理磁盘文件 b$(xe vm-disk-list --multiple | grep uuid | awk {print $NF})printf "%s\n"…...