【小样本分割 2022 ECCV】SSP
文章目录
- 【小样本分割 2022 ECCV】SSP
- 摘要
- 1. 介绍
- 2. 相关工作
- 3. 自支持小样本语义分割
- 3.1 动机
- 3.2 自支持原型-SSM
- 3.3 自适应自支持背景原型-ASBP
- 3.4 自支持匹配-SSL
- 3. 代码
【小样本分割 2022 ECCV】SSP
论文题目:Self-Support Few-Shot Semantic Segmentation
中文题目:自支持小样本语义分割
论文链接:https://arxiv.org/abs/2207.11549
论文代码:https://github.com/fanq15/ssp
论文团队:香港科学技术大学&哈尔滨工业大学&快手科技
发表时间:2022年7月
DOI:
引用:Fan Q, Pei W, Tai Y W, et al. Self-support few-shot semantic segmentation[C]//Computer Vision–ECCV 2022: 17th European Conference, Tel Aviv, Israel, October 23–27, 2022, Proceedings, Part XIX. Cham: Springer Nature Switzerland, 2022: 701-719.
引用数:10【截止时间:2023年5月1号】
摘要
现有的基于支持-查询匹配框架的小样本分割方法取得了很大的进展。 但是他们仍然严重地受到了来自少量支持的类内变化的有限覆盖的影响。
基于简单格式塔原理,即同一对象的像素比同一类不同对象的像素更相似,我们提出了一种新的自支持匹配策略,
该策略使用查询原型来匹配查询特征,其中查询原型是从高置信度的查询预测中收集的。
该策略能够有效地捕获查询对象的一致底层特征,从而匹配查询特征。 提出了自适应的自支撑背景原型生成模块和自支撑损失,进一步方便了自支撑匹配过程。
我们的自支持网络大大提高了原型的质量,从更强的骨干和更多的支持中受益于更多的改进,并在多个数据集上实现了SOTA。
现有的一些小样本分割方法在支持-查询匹配框架的基础上取得了很大的进展。
- 存在的问题 :
support和query同类目标之间存在的外观差异。 - 动机 : 基于简单格式塔原理,即属于同一目标的像素比属于同—类的不同目标的像素更相似。
- 本文贡献:
- 提出了一种新的
自支持匹配策略,该策略使用查询原型来匹配查询特征,其中查询原型是从高
置信度查询预测中收集的。该策略可以有效地捕获查询目标的一致基本特征,从而匹配查询特征。 - 还提出了
自适应自支持背景原型生成模块和自支持损失,以进一步促进自支持匹配过程。本文
自支持网络大大提高了原型质量,在多个数据集上实现了SOTA。
- 提出了一种新的
1. 介绍
语义分割已经在深度学习网络[29,42,34]和大规模数据集[15,5,93]中取得了显著的进展。 然而,目前高性能的语义分割方法严重依赖于费力的像素级标注,这加速了近年来小样本语义分割(FSS)的发展。
小样本语义分割的目的是只使用少量支持样本来分割任意新的类。 困难在于支持图像是有限的和固定的(通常每个类支持{1,3,5,10}),而查询图像可能是大量的和任意的。
无论支持质量如何,有限的支持图像很容易无法覆盖查询图像中目标类的潜在外观变化。 这显然是由固有的数据稀缺性和多样性造成的,这是小样本学习中两个长期存在的问题。
现有的方法试图通过充分利用有限的支持来解决这一问题,如提出更好的匹配机制或生成具有代表性的原型。 尽管它们取得了成功,但仍然不能从根本上解决有限镜头支撑下的外观差异问题。
但是这些方法都无法从根本上解决 support 和 query 之间的 appearance gap 问题。因为它们还都局限在利用非常少数的 support 去分割无穷的 query。
我们提出了一种新的自支持匹配策略来缩小匹配外观差异。 这种策略使用查询原型来匹配查询特性,或者换句话说,使用查询特性来自我支持。 因此,由于查询原型的自匹配特性,我们将其称为自支持原型。 这个新想法的动机是经典格式塔定律,即属于同一物体的像素比属于不同物体的像素更相似。
请参阅图1,以获得对我们新颖的自我支持匹配的高级理解。 首先,通过直接匹配支持原型和查询特征生成初始掩码预测。 在初始查询掩码的基础上,收集可信的查询特征生成自支持原型,用于与查询特征进行匹配。 我们的自我支持模块(SSM)收集猫头的可靠特征,用于分割整个黑猫。 我们的模型在基类上进行了优化,以检索由对象片段支持的其他对象部分,即自支持原型。
我们将我们的自支持模块应用于前景和背景原型中进行自支持匹配。 虽然SSM直接有利于前景原型,但请注意,背景通常是杂乱的,这不具有所有背景像素之间共享的全局语义共同性。
因此,我们不是通过聚集所有背景像素来生成全局背景原型,而是通过动态聚集查询图像中相似的背景像素来自适应地为每个查询像素生成自我支持的背景原型。
自适应支持背景原型(ASBP)是由独立的背景区域具有局部语义相似性这一事实所驱动的。 最后,我们提出了一个自支撑损失(SSL)来进一步方便自支撑程序。
因此,我们的自支持匹配策略与传统的支持-查询匹配有根本的不同。 采用灵活的自支持原型进行查询特征匹配,可以有效地捕捉查询对象的一致底层特征,从而实现对查询特征的匹配。 如图1所示,查询和支持图像中的猫在颜色、部位和尺度上都有很大差异,加菲猫支持图像与黑猫查询图像有很大的外观差异,传统的支持-查询匹配无疑会产生较差的分割。 在我们的自支持匹配中,我们的自支持原型(黑猫头部)与查询(整个黑猫)更加一致,因此我们的方法得到了令人满意的结果。
我们是第一个在查询原型和查询特征之间执行自我支持匹配的。 如图1所示,我们的自支撑匹配从根本上不同于常规匹配。 其他方法从额外的未标记图像(PPNET[57]和MLC[82])中学习用于支持查询匹配的更好的支持原型,或者基于支持图像构建各种支持原型生成模块[71,45,81]或特征先验(PFENET[73])。 虽然Panet[75]和CRNET[55]也探索了查询原型,但它们使用查询原型来匹配支持特征,仅作为辅助训练的查询-支持匹配,不能解决外观差异问题。
我们的自支持方法通过缓解类内外观差异问题显著提高了原型质量,在我们的实验验证中,在多个数据集上的性能提升证明了这一点。 尽管思想简单,但我们的自支持方法非常有效,具有多种优点,如更强的主干和更多的支持,产生高置信度的预测,对弱支持标签的鲁棒性更强,对其他方法的泛化程度更高,运行效率更高。 我们将用深入的实验来证实这些优点。 概括地说,我们的贡献是:
- 提出了一种新的自支持匹配方法,并构造了一种新的自支持网络来解决FSS中的外观差异问题。
- 我们提出了自我支持原型,自适应自我支持背景原型和自我支持损失,以方便我们的自我支持方法。
- 我们的自我支持方法从更强大的骨干和更多的支持中受益更多的改进,并在多个数据集上优于以前的SOTA,具有许多可取的优势。
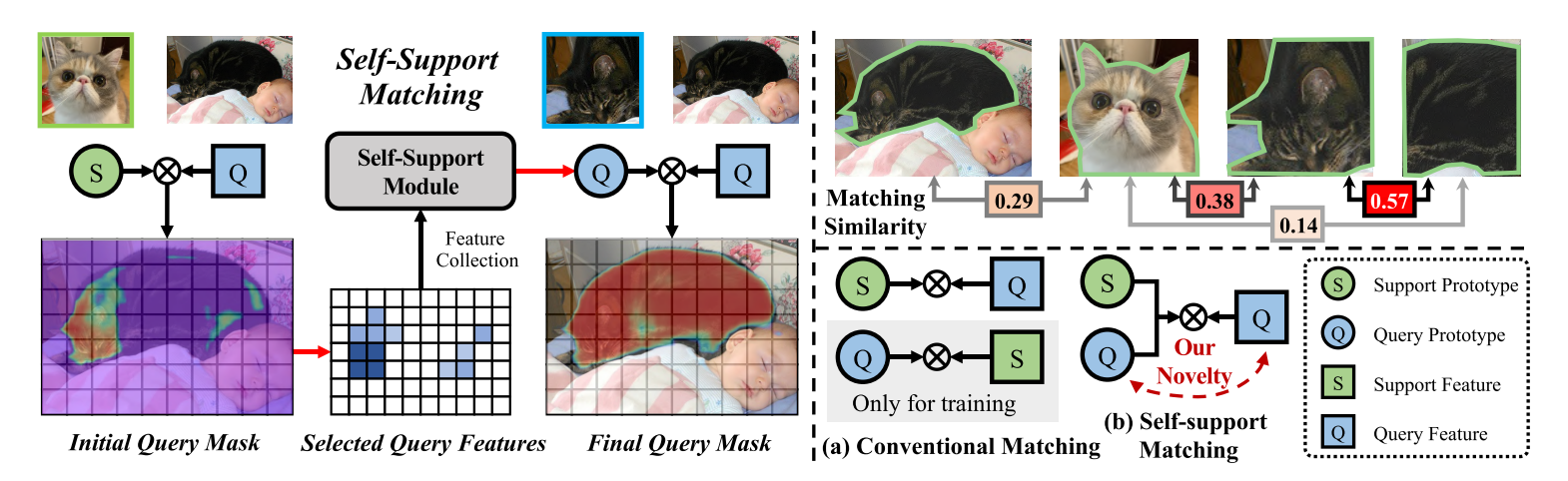
左图说明了我们自支持匹配的核心思想。利用初始查询掩码预测在高置信度区域收集查询特征,然后利用生成的查询原型与查询特征进行自匹配。
右上方的图像说明了我们自我支持匹配的动机:相同对象的像素/区域比来自不同对象的像素/区域更相似。 方框中的数字表示两个物体之间的余弦相似度。
右下角的图像说明了我们的自我支持匹配与传统的匹配方法有根本的不同。
语义分割在深度学习网络和大规模数据集方面取得了显著进展。但是当前高性能语义分割方法严重依赖于费力的像素级标注,加速了小样本语义分割(FSS)的发展。
FSS的问题: 固有的数据稀少性和数据多样性
- 数据稀少性是指支持图像很少,每个新类别只有不到10个样本。
- 数据多样性是指查询图像可能是海量和任意的。
支持图像中物体根本无法涵盖所有查询图像中同类别物体。
2. 相关工作
语义分割。
语义分割是计算机视觉的一个基本任务,用于产生像素级的稠密语义预测。 端到端的全卷积网络(FCN)[58]极大地推进了这一技术的发展。 随后的工作遵循了FCN范式,并贡献了许多有效的模块来进一步提高性能,如编码器-解码器体系结构[4,13,11,67]、图像和特征金字塔模块[39,91,10,49,50]、上下文聚合模块[25,26,33,92,95,36,85,89]和高级卷积层[84,9,14,63]。 尽管如此,上述分割方法在很大程度上依赖于丰富的像素级标注。 本文旨在解决少镜头场景下的语义分割问题。
小样本学习。
小样本学习的目标是从很少的样本中识别新的概念。 在过去的几年里,这种低成本的财产吸引了许多研究兴趣。 主要有三种方法。 第一种是迁移学习方法[12,28,16,65],通过在两个阶段的优化过程中将从基类学习到的先验知识调整到新的类。 第二种是基于优化的方法[24,6,44,30,43,2,31,68],它通过从少量样本中元学习优化过程来快速更新模型。 最后是基于度量的方法[1,17,35,40,46,47],它在支持查询对上应用暹罗网络[40]来学习评估它们相关性的一般度量。 我们的工作,包括许多关于各种高级计算机视觉任务的少量工作[23,37,90,80,22]都受到了基于度量的方法的启发。
小样本语义分割。
小样本语义分割是Shaban等人首创的。 [69]。 后来的工作主要采用了基于度量的主流范式[18],并进行了各种改进,例如用各种注意机制[70,54,83]、更好的优化[94,53]、存储模块[77,79]、图神经网络[78,74,87]、基于学习的分类器[72,59]、渐进匹配[32,96]或其他高级技术[86,52,61,48]改进支持查询图像之间的匹配过程。 我们是第一个在查询原型和查询特征之间执行自我支持匹配的。 我们的自支持匹配方法也与原型生成方法有关。 有些方法利用额外的未标记数据[82,57]或特征先验信息[73]来进一步增强特征。 其他方法使用各种技术生成代表性支持原型,例如,注意机制[88,27]、自适应原型学习[71,45,64]或各种原型生成方法[62,81]。 尽管查询原型已经在一些方法中得到了探索[75,55],但它们只使用查询原型来匹配支持特征以进行原型正则化。 最后,现有方法在支持-查询匹配中存在类内差异问题。 另一方面,我们提出了一种新的自我支持匹配策略来有效地解决这个匹配问题。
3. 自支持小样本语义分割
在只有少量支持图像的情况下,小样本语义分割的目的是利用从基类中推广的模型来分割新类的对象。 现有主流的少镜头语义分割方案可表述为:输入支持和查询图像 { I s , I q } \left\{I_{s},I_{q}\right\} {Is,Iq}通过权重共享主干处理,提取图像特征 { F s , F q } ∈ R C × H × W , \{\mathcal{F}_{s},\mathcal{F}_{q}\}\in\mathbb{R}^{C\times H\times W}, {Fs,Fq}∈RC×H×W,,其中C为通道大小,H×W为特征空间大小。 然后将支持度特征 F s \mathcal{F}_{s} Fs及其地真掩码 M s {\mathcal{M}}_{s} Ms送入掩码平均池层,分别生成前景和背景区域的支持度原型向量 P s = { P s , f , P s , b } ∈ R C × 1 × 1 \mathcal{P}_{s}=\{\mathcal{P}_{s,f},\mathcal{P}_{s,b}\}\in \mathbb{R}^{C\times 1 \times 1} Ps={Ps,f,Ps,b}∈RC×1×1。 最后,通过计算 P s {\mathcal{P}}_{s} Ps和 F q {\mathcal{F}}_{q} Fq之间的余弦相似度,生成两个距离映射 D = { D f , D b } \mathcal{D}=\{\mathcal{D}_{f},\mathcal{D}_{b}\} D={Df,Db},然后通过Softmax运算处理,作为最终预测 M 1 = s o f t m a x ( D ) \mathcal{M}_{1}=\mathrm{softmax}(\mathcal{D}) M1=softmax(D)。
3.1 动机
目前的FSS方法很大程度上依赖于支持原型来分割查询对象,通过将每个查询像素与支持原型进行密集匹配。 然而,这种跨对象匹配严重地受到类内外观差异的影响,即使属于同一类,支持和查询中的对象看起来也可能非常不同。 如此高的类内变化不能仅通过少数支持来协调,因此由于查询和支持之间的外观差距很大,导致匹配结果很差。
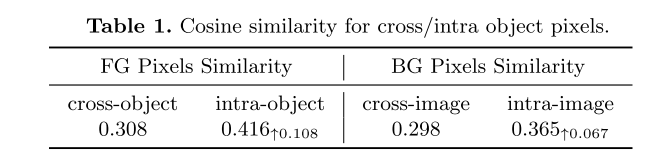
为了验证格式塔定律在缩小这种外观差异方面的相关性,我们统计分析了Pascal VOC中跨对象和内对象像素的特征余弦相似性,其中像素特征是从ImageNet-Pretrianed Resnet-50中提取的。 表1显示,属于同一对象的像素比跨对象的像素相似得多。 值得注意的是,背景像素本身具有相似的特征,其中图像内背景像素比图像间背景像素更相似。
因此,我们建议利用查询特性来生成自我支持的原型,以匹配查询特性本身。 值得注意的是,这样的原型沿着同源的查询特征对齐查询,从而可以显著地缩小支持和查询之间的特征差距。 事后看来,自支持匹配优于传统支持查询匹配的关键原因在于,对于给定的可视对象类,对象内相似度远高于对象间相似度。
3.2 自支持原型-SSM
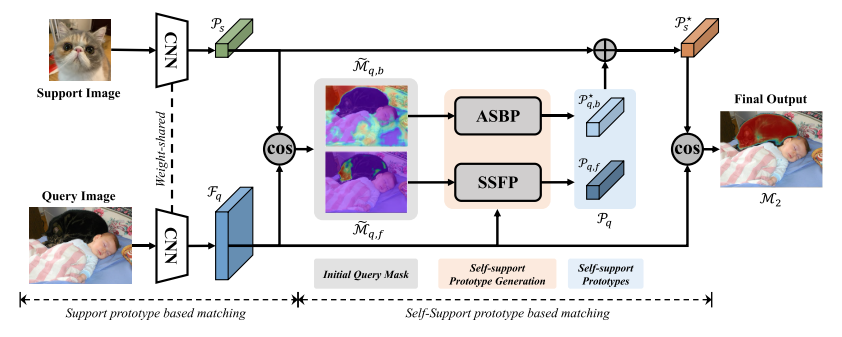
图 2. 整体自立网络架构。 我们首先使用传统的基于支持原型的匹配网络生成初始掩码预测。 然后利用初始查询掩码聚合查询特征生成自支持原型,即自支持前台原型(SSFP)和自适应自支持后台原型(ASBP)。 最后,我们结合支持原型和自支持原型来执行与查询特征的匹配。
我们的核心思想(图2)是聚合查询特性来生成查询原型,并使用它来自我支持查询特性本身。
概括地说,常规的支持原型生成过程是:
P s = M A P ( M s , F s ) , {\cal P}_{s}=M A P({\cal M}_{s},{\cal F}_{s}), Ps=MAP(Ms,Fs),
其中 M A P MAP MAP是屏蔽平均池操作,用于生成具有查询特征 F q \mathcal{F}_q Fq的匹配预测:
M 1 = s o f t m a x ( c o s i n e ( P s , F q ) ) , \mathcal{M}_1=\mathrm{softmax}(\mathrm{cosine}(\mathcal{P}_s,\mathcal{F}_q)), M1=softmax(cosine(Ps,Fq)),
其中余弦是余弦相似性度量。
现在,我们可以用同样的方式生成查询原型 P q \mathcal{P}_{q} Pq,只是查询图像 M q \mathcal{M}_{q} Mq的真值掩码在推理过程中不可用。 因此,我们需要使用预测查询掩码 M ~ q \widetilde{\mathcal{M}}_q M q来聚合查询特征。 查询原型生成过程可以表述为:
P q = M A P ( M ~ q , F q ) , \mathcal{P}_{q}=M A P(\widetilde{\mathcal{M}}_{q},\mathcal{F}_{q}), Pq=MAP(M q,Fq),
其中 M ~ q = 1 ( M 1 > τ ) \widetilde{\mathcal{M}}_{q}=\mathbb{1}(\mathcal{M}_{1}>\tau) M q=1(M1>τ), M 1 \mathcal M_1 M1是由公式2生成的估计查询掩码,1是指示函数。
利用掩码阈值 τ \tau τ来控制查询特征的采样范围,前台和后台的查询掩码分别设置为 { τ f g = 0.7 , τ b g = 0.6 } \{\tau_{f g}=0.7,\tau_{b g}=0.6\} {τfg=0.7,τbg=0.6}。 估计的自支持原型 P q = { P q , f , P q , b } {\cal P}_{q}=\{{\cal P}_{q,f},{\cal P}_{q,b}\} Pq={Pq,f,Pq,b}将用于匹配查询特征。
我们理解读者对自支撑原型质量的天然关注,这是基于估计的查询掩码生成的,即估计的掩码是否能够有效地自支撑原型生成。我们发现即使是估计的查询掩码也不完美,只要它覆盖了一些有代表性的对象片段,就足以检索同一对象的其他区域。为了验证部分对象或对象片段能够支持整个对象,我们使用部分原型训练和评估模型,这些原型是根据真实掩码标签从随机选择的特征中聚合而来的。我们使用 ResNet-50 骨干在 Pascal VOC 数据集上进行了 1-shot 分割实验。如表 2 所示,在减少原型生成的聚合对象区域的同时,我们的自支撑原型始终实现高分割性能。相比之下,传统的支持原型始终获得低劣的性能,即使使用整个对象的完美支持功能。
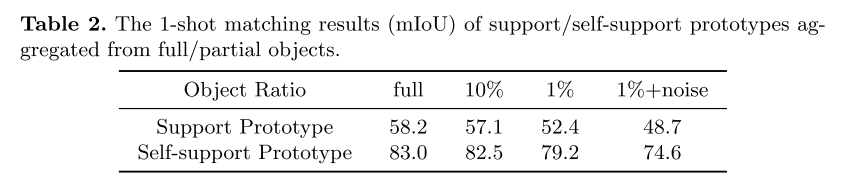
通过随机选择非目标区域的图像特征,并将这些特征聚合到上述部分原型中,在部分原型中引入20%噪声比的噪声特征,以模拟推理过程中真实的自我支持生成。 令我们惊喜的是,在这样嘈杂的环境中,我们的自助式样机仍然比传统的支持式样机工作得好得多。 注意,每个图像可能包含多个对象,因此良好的性能表明我们的自支持原型也可以很好地处理多对象场景。 这些结果证实了我们的自支撑样机在实际应用中的实用性和优越性。
3.3 自适应自支持背景原型-ASBP
前景像素具有语义共性,这构成了我们在查询特征和前景对象支持原型之间自动支持原型生成和匹配过程的基本原理。 因此,我们可以利用屏蔽平均池来生成自我支持的前景原型(图3(a)):
P q , f = M A P ( M ~ q , f , F q ) , \mathcal{P}_{q,f}=MAP(\widetilde{\mathcal{M}}_{q,f},\mathcal{F}_q), Pq,f=MAP(M q,f,Fq),
其中 M ~ q , f \widetilde{\mathcal{M}}_{q,f} M q,f是前面提到的估计查询掩码。
另一方面,背景可能是杂乱的,在不相交的区域中,共性可以被简化为局部语义相似性,而不是所有背景像素之间共享的全局语义共性。 例如,对于一个以狗为目标类的查询图像,人和车等其他对象都被视为背景,但它们在外观和语义层次上都是不同的。 如表1所示,与前景像素相比,背景像素相似性更小,这也验证了这一观察,尤其是在对象/图像内的情况下。 这促使我们为不同的查询语义区域生成多个自支持背景原型。
一个简单的解决方案是使用聚类算法直接对多个背景原型进行分组,然后在每个查询像素处选择最相似的原型进行背景匹配。 这种显式背景分组在很大程度上依赖于聚类算法,该算法不稳定且耗时。 因此,我们提出了一种更加灵活高效的方法,为每个查询像素自适应地生成自我支持的背景原型(图3(b))。
其思想是为每个查询像素动态聚合相似的背景像素,以生成自适应的自我支持背景原型。
具体来说,我们首先通过对查询特征 F q \mathcal{F}_q Fq与背景掩码 M ~ q , b \widetilde{\mathcal{M}}_{q,b} M q,b进行掩码乘法来收集背景查询特征 F q , b ∈ R C × M \mathcal{F}_{q,b}\in\mathbb{R}^{C\times M} Fq,b∈RC×M,其中 M M M是背景区域的像素个数。 然后我们可以通过矩阵乘法运算 M a t m u l Matmul Matmul生成重塑后的背景查询特征 F q , b \mathcal{F}_{q,b} Fq,b和全查询特征 F q \mathcal{F}_q Fq的像素之间的亲和力矩阵 A \mathcal{A} A:
A = M a t M u l ( F q , b T , F q ) , \mathcal{A}=Mat Mul({\mathcal{F}_{q,b}}^T,\mathcal{F}_q), A=MatMul(Fq,bT,Fq),
其中 A \mathcal{A} A的大小为 R M × ( H × W ) \mathbb{R}^{M \times (H \times W)} RM×(H×W)。 在第一维上通过Softmax运算对亲和力矩阵进行归一化,并对每个查询像素的背景查询特征进行加权聚合,生成自适应自支持背景原型 P q , b ⋆ ∈ R C × H × W \mathcal{P}_{q,b}^{\star}\in\mathbb{R}^{C\times H\times W} Pq,b⋆∈RC×H×W:
P q , b ⋆ = M a t M u l ( F q , b , s o f t m a x ( A ) ) . \mathcal{P}_{q,b}^{\star}=M a t\mathop{M u l}(\mathcal{F}_{q,b},\mathrm{softmax}(\mathcal{A})). Pq,b⋆=MatMul(Fq,b,softmax(A)).
用自适应的自支持背景原型更新自支持原型: P q = { P q , f , P q , b ⋆ } . \mathcal{P}_{q}=\{\mathcal{P}_{q,f},\mathcal{P}_{q,b}^{\star}\}. Pq={Pq,f,Pq,b⋆}.。
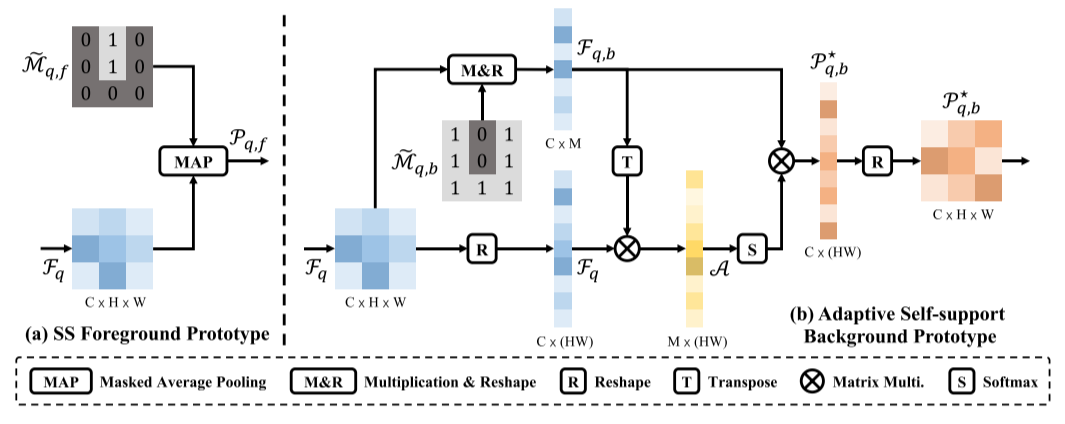
原型生成
(a)自我支持(SS)前景原型
(b)自适应自我支持背景原型。
3.4 自支持匹配-SSL
我们加权组合了支持原型 P s \mathcal{P}_s Ps和自我支持原型 P q \mathcal{P}_q Pq:
P s ⋆ = α 1 P s + α 2 P q , \mathcal{P}_s^\star=\alpha_1\mathcal{P}_s+\alpha_2\mathcal{P}_q, Ps⋆=α1Ps+α2Pq,
其中, α 1 \alpha_1 α1和 α 2 \alpha_2 α2是调谐权重,我们在实验中设置 α 1 = α 2 = 0.5 \alpha_1=\alpha_2=0.5 α1=α2=0.5。 然后我们计算增强支持度原型 P s ⋆ \mathcal{P}_s^\star Ps⋆和查询特征 F q \mathcal{F}_q Fq之间的余弦距离来生成最终的匹配预测:
M 2 = s o f t m a x ( c o s i n e ( P s ⋆ , F q ) ) . \mathcal{M}_{2}=\mathrm{softmax}(\mathrm{cosine}(\mathcal{P}_{s}^{\star},\mathcal{F}_{q})). M2=softmax(cosine(Ps⋆,Fq)).
然后我们在生成的距离进行有监督训练监督:
L m = B C E ( cosine ( P s ⋆ , F q ) , G q ) , \mathcal{L}_m=BCE(\operatorname{cosine}(\mathcal{P}_s^{\star},\mathcal{F}_q),\mathcal{G}_q), Lm=BCE(cosine(Ps⋆,Fq),Gq),
其中 B C E BCE BCE是二值交叉熵损失, G q \mathcal{G}_q Gq是查询图像的真值掩码。
为了进一步简化自支持匹配过程,我们提出了一种新的查询自支持丢失。 对于查询特性 F q \mathcal{F}_q Fq及其原型 P q \mathcal{P}_{q} Pq,我们应用以下训练监督:
L q = B C E ( cosine ( P q , F q ) , G q ) . \mathcal L_q=BCE(\operatorname{cosine}(\mathcal P_q,\mathcal F_q),\mathcal G_q). Lq=BCE(cosine(Pq,Fq),Gq).
我们可以在支持度特征上应用同样的过程来引入支持度自匹配损失 L s \mathcal{L}_s Ls。
最后,我们通过联合优化前述所有损失,以端到端的方式训练模型:
L = λ 1 L m + λ 2 L q + λ 3 L s , \mathcal{L}=\lambda_1\mathcal{L}_m+\lambda_2\mathcal{L}_q+\lambda_3\mathcal{L}_s, L=λ1Lm+λ2Lq+λ3Ls,
其中λ1=1.0,λ2=1.0,λ3=0.2是损失权重。
3. 代码
原生代码写的非常的不错。我这里做了注释。
from .resnet import resnet50, resnet101import torch
from torch import nn
import torch.nn.functional as Fclass SSP_MatchingNet(nn.Module):def __init__(self, backbone, pretrained=True, refine=False):super(SSP_MatchingNet, self).__init__()backbone = eval(backbone)(pretrained=pretrained) # 创建backboneself.layer0 = nn.Sequential(backbone.conv1, backbone.bn1, backbone.relu, backbone.maxpool)self.layer1, self.layer2, self.layer3 = backbone.layer1, backbone.layer2, backbone.layer3self.refine = refinedef forward(self, img_s_list, mask_s_list, img_q, mask_q):"""Args:img_s_list: support imagesList shape=shot x [batch size,3,473,473]mask_s_list: masks for support images List shape=shot x [batch size,473,473]img_q: query images[batch_size,3,473,473]mask_q: query images[batch_size,473,473]"""h, w = img_q.shape[-2:]# feature maps of support imagesfeature_s_list = []# 获取支持集的特征for k in range(len(img_s_list)):with torch.no_grad():s_0 = self.layer0(img_s_list[k])s_0 = self.layer1(s_0) # [4,256,119,119]s_0 = self.layer2(s_0) # [4,256,119,119]-> [4,256,60,60]s_0 = self.layer3(s_0) # [4,256,60,60] -> [4,1024,60,60]feature_s_list.append(s_0)del s_0# 获取查询集图像的特征with torch.no_grad():q_0 = self.layer0(img_q)q_0 = self.layer1(q_0)q_0 = self.layer2(q_0)feature_q = self.layer3(q_0) # [4,1024,60,60]# foreground(target class) and background prototypes pooled from K support featuresfeature_fg_list = []feature_bg_list = []supp_out_ls = []for k in range(len(img_s_list)):# feature_fg=[1,4,1024]feature_fg = self.masked_average_pooling(feature_s_list[k], (mask_s_list[k] == 1).float())[None, :]# feature_bg=[1,4,1024]feature_bg = self.masked_average_pooling(feature_s_list[k], (mask_s_list[k] == 0).float())[None, :]feature_fg_list.append(feature_fg)feature_bg_list.append(feature_bg)if self.training:# 自支持损失 SSL# [4,60,60] 。支持集图像的原型 来分割 支持集图像supp_similarity_fg = F.cosine_similarity(feature_s_list[k], feature_fg.squeeze(0)[..., None, None], dim=1)# [4,60,60]supp_similarity_bg = F.cosine_similarity(feature_s_list[k], feature_bg.squeeze(0)[..., None, None], dim=1)# [4,2,60,60]supp_out = torch.cat((supp_similarity_bg[:, None, ...], supp_similarity_fg[:, None, ...]), dim=1) * 10.0supp_out = F.interpolate(supp_out, size=(h, w), mode="bilinear", align_corners=True) # [4,2,473,473]supp_out_ls.append(supp_out)# 对shot个图片进行平均,计算原型 [4,1024,1,1]FP = torch.mean(torch.cat(feature_fg_list, dim=0), dim=0).unsqueeze(-1).unsqueeze(-1)# 背景原型 [4,1024,1,1]BP = torch.mean(torch.cat(feature_bg_list, dim=0), dim=0).unsqueeze(-1).unsqueeze(-1)# 计算查询特征和前景和背景的原型 之间的相似度。计算出初步的分割掩码out_0 = self.similarity_func(feature_q, FP, BP) # [4,2,60,60]##################### Self-Support Prototype (SSP) ###################### SSFP_1=[4,1024,1,1],SSBP_1=[4,1024,1,1],ASBP_1=[4,1024,60,60] ,ASFP_1=[4,1024,60,60]SSFP_1, SSBP_1, ASFP_1, ASBP_1 = self.SSP_func(feature_q, out_0) FP_1 = FP * 0.5 + SSFP_1 * 0.5 # [4,1024,1,1]BP_1 = SSBP_1 * 0.3 + ASBP_1 * 0.7 # [4,1024,1,1]out_1 = self.similarity_func(feature_q, FP_1, BP_1) # [4,2,60,60]##################### SSP Refinement #####################if self.refine:SSFP_2, SSBP_2, ASFP_2, ASBP_2 = self.SSP_func(feature_q, out_1)FP_2 = FP * 0.5 + SSFP_2 * 0.5BP_2 = SSBP_2 * 0.3 + ASBP_2 * 0.7FP_2 = FP * 0.5 + FP_1 * 0.2 + FP_2 * 0.3BP_2 = BP * 0.5 + BP_1 * 0.2 + BP_2 * 0.3out_2 = self.similarity_func(feature_q, FP_2, BP_2)out_2 = out_2 * 0.7 + out_1 * 0.3# out_0 = F.interpolate(out_0, size=(h, w), mode="bilinear", align_corners=True)out_1 = F.interpolate(out_1, size=(h, w), mode="bilinear", align_corners=True) # [4,2,473,473]if self.refine:out_2 = F.interpolate(out_2, size=(h, w), mode="bilinear", align_corners=True)out_ls = [out_2, out_1]else:out_ls = [out_1]if self.training:# 自支持损失 SSLfg_q = self.masked_average_pooling(feature_q, (mask_q == 1).float())[None, :].squeeze(0) # [4,1024]bg_q = self.masked_average_pooling(feature_q, (mask_q == 0).float())[None, :].squeeze(0) # [4,1024]self_similarity_fg = F.cosine_similarity(feature_q, fg_q[..., None, None], dim=1) # [4,60,60]self_similarity_bg = F.cosine_similarity(feature_q, bg_q[..., None, None], dim=1) # [4,60,60]self_out = torch.cat((self_similarity_bg[:, None, ...], self_similarity_fg[:, None, ...]), dim=1) * 10.0 # [4,2,60,60]self_out = F.interpolate(self_out, size=(h, w), mode="bilinear", align_corners=True)supp_out = torch.cat(supp_out_ls, 0)out_ls.append(self_out)out_ls.append(supp_out)return out_lsdef SSP_func(self, feature_q, out):"""查询编码 和 分割结果"""bs = feature_q.shape[0] # [4,1024,60,60] 查询编码pred_1 = out.softmax(1) # [4,2,60,60]-> [4,2,60,60] 分割结果pred_1 = pred_1.view(bs, 2, -1) # [4,2,3600]pred_fg = pred_1[:, 1] # [4,3600] # 前景分割概率pred_bg = pred_1[:, 0] # [4,3600] # 背景分割概率fg_ls = []bg_ls = []fg_local_ls = []bg_local_ls = []for epi in range(bs):fg_thres = 0.7 # 0.9 #0.6bg_thres = 0.6 # 0.6cur_feat = feature_q[epi].view(1024, -1) # [1024,3600] 当前query特征f_h, f_w = feature_q[epi].shape[-2:]# step 1: 通过对查询特征 与 背景掩码 进行掩码乘法来收集背景查询特征if (pred_fg[epi] > fg_thres).sum() > 0:fg_feat = cur_feat[:, (pred_fg[epi] > fg_thres)] # .mean(-1) #选出前景特征else:fg_feat = cur_feat[:, torch.topk(pred_fg[epi], 12).indices] # .mean(-1)if (pred_bg[epi] > bg_thres).sum() > 0:bg_feat = cur_feat[:, (pred_bg[epi] > bg_thres)] # .mean(-1)else:bg_feat = cur_feat[:, torch.topk(pred_bg[epi], 12).indices] # .mean(-1) # 选出背景特征# global protofg_proto = fg_feat.mean(-1) # 高置信度的前景的原型bg_proto = bg_feat.mean(-1) # 高置信度的背景的原型fg_ls.append(fg_proto.unsqueeze(0))bg_ls.append(bg_proto.unsqueeze(0))# local protofg_feat_norm = fg_feat / torch.norm(fg_feat, 2, 0, True) # 1024, N1 高置信度的前景的特征bg_feat_norm = bg_feat / torch.norm(bg_feat, 2, 0, True) # 1024, N2 高置信度的背景的特征cur_feat_norm = cur_feat / torch.norm(cur_feat, 2, 0, True) # 1024, N3cur_feat_norm_t = cur_feat_norm.t() # N3, 1024# step 2: 通过矩阵乘法运算生成亲和力矩阵Afg_sim = torch.matmul(cur_feat_norm_t, fg_feat_norm) * 2.0 # N3, N1bg_sim = torch.matmul(cur_feat_norm_t, bg_feat_norm) * 2.0 # N3, N2# 第一维上通过Softmax运算对亲和力矩阵进行归一化fg_sim = fg_sim.softmax(-1)bg_sim = bg_sim.softmax(-1)# 生产自适应背景原型fg_proto_local = torch.matmul(fg_sim, fg_feat.t()) # N3, 1024bg_proto_local = torch.matmul(bg_sim, bg_feat.t()) # N3, 1024fg_proto_local = fg_proto_local.t().view(1024, f_h, f_w).unsqueeze(0) # 1024, N3bg_proto_local = bg_proto_local.t().view(1024, f_h, f_w).unsqueeze(0) # 1024, N3fg_local_ls.append(fg_proto_local)bg_local_ls.append(bg_proto_local)# global protonew_fg = torch.cat(fg_ls, 0).unsqueeze(-1).unsqueeze(-1)new_bg = torch.cat(bg_ls, 0).unsqueeze(-1).unsqueeze(-1)# local protonew_fg_local = torch.cat(fg_local_ls, 0).unsqueeze(-1).unsqueeze(-1)new_bg_local = torch.cat(bg_local_ls, 0)return new_fg, new_bg, new_fg_local, new_bg_localdef similarity_func(self, feature_q, fg_proto, bg_proto):"""通过计算相似度来进行分割feature_q: [4,1024,60,60] 查询集特征fg_proto: [4,1024,1,1] 前景原型bg_proto: [4,1024,1,1] 背景原型结果: [4,2,60,60] 初步的分割结果"""similarity_fg = F.cosine_similarity(feature_q, fg_proto, dim=1)similarity_bg = F.cosine_similarity(feature_q, bg_proto, dim=1)out = torch.cat((similarity_bg[:, None, ...], similarity_fg[:, None, ...]), dim=1) * 10.0 # [4,2,60,60]return outdef masked_average_pooling(self, feature, mask):"""通过mask_pool操作获取对应特征的原型。feature: [4,1024,60,60]mask: [4,473,473]return feature : [4,1024]"""# [4,473,473] -> [4,1,60,60]mask = F.interpolate(mask.unsqueeze(1), size=feature.shape[-2:], mode='bilinear', align_corners=True)masked_feature = torch.sum(feature * mask, dim=(2, 3)) / (mask.sum(dim=(2, 3)) + 1e-5)return masked_featureECCV 2022 | SSP: 自支持匹配的小样本任务新思想 - 知乎 (zhihu.com)
(4条消息) 【小样本分割】Self-Support Few-Shot Semantic Segmentation_小样本语义分割_栗子菜菜的博客-CSDN博客
相关文章:
【小样本分割 2022 ECCV】SSP
文章目录 【小样本分割 2022 ECCV】SSP摘要1. 介绍2. 相关工作3. 自支持小样本语义分割3.1 动机3.2 自支持原型-SSM3.3 自适应自支持背景原型-ASBP3.4 自支持匹配-SSL 3. 代码 【小样本分割 2022 ECCV】SSP 论文题目:Self-Support Few-Shot Semantic Segmentation 中…...

Friendlycore增加inodes数量
背景:为Nanopim1安装了core系统,tf卡大小64G,安装后正常扩展到了整个tf卡,但是在安装hass的docker显示磁盘空间不够,最终发现是inode被用完了。其inode只有960K,但是16G卡树莓派系统的inodes都是其两倍。 一…...
和(ntheorm)的区别)
Latex 定理和证明类环境(amsthm)和(ntheorm)的区别
最近在写毕业论文,出现了一些定理和证明的环境的问题,问题出现在对两个包的理解程度不够的问题上: \RequirePackage{ntheorem} 1、\newtheorem*{proof}{\hspace{2em}证:} 这个是让证明失去计数原则,该命令不能用于 amsthm 2…...

Yolov8改进---注意力全家桶,小目标涨点
💡💡💡💡💡💡💡💡💡💡注意力全家桶💡💡💡💡💡💡💡💡💡💡💡 基于Yolov8的注意力机制研究,提升小目标、遮挡物、难样本等检测性能...
[Linux]网络连接、资源共享
⭐作者介绍:大二本科网络工程专业在读,持续学习Java,输出优质文章 ⭐作者主页:逐梦苍穹 ⭐所属专栏:Linux基础操作。本文主要是分享一些Linux系统常用操作,内容主要来源是学校作业,分享出来的…...

来上海一个月的记录、思考和感悟
作者 | gongyouliu 编辑 | gongyouliu 从4月3号早上来上海,到今天差不多整整一个月了,也是自己正式从杭州离职创业(我更愿意称之为自由职业者,毕竟我没有招聘全职员工,有两个朋友业余时间在帮我)的第一个月…...

学校信息化管理系统通常包含哪些功能?
学校管理信息化是现代教育发展的必然趋势,随着信息技术的飞速发展,学校管理也逐渐地实现了信息化。信息化的学校管理已经成为教育现代化建设的重要内容,也是提高学校教育教学质量和保障学生安全的重要手段。 作为一款低代码开发平台…...
 -- Calendar()(日历类))
Java时间类(三) -- Calendar()(日历类)
java.util.Calendar类是一个抽象类,它提供了日期计算的相关功能、获取或设置各种日历字段的方法。 protected Calendar() 构造方法为protected修饰,无法直接创建该对象。1. Calendar()的常用方法: 方法名说明static Calendar getInstance()使用默认时区和区域获取日历vo…...

【五一创作】QML、Qt Quick /Qt中绘制圆形
目录标题 Qt Quick中绘制圆形扩展知识Canvas 模块介绍Shapes 模块介绍 Qt Widgets 中绘制圆形两种方式的比较 Qt Quick中绘制圆形 有多种方法可以在 Qt Quick 中绘制圆形。以下是一些主要方法: 使用 Canvas 元素 使用 Shapes 模块: a. 使用 PathArc 和…...

【软考数据库】第七章 关系数据库
目录 7.1 关系数据库概述 7.2 关系代数 7.3 元组演算与域演算 7.4 查询优化 7.5 关系数据库设计 7.6 模式分解 前言: 笔记来自《文老师软考数据库》教材精讲,精讲视频在b站,某宝都可以找到,个人感觉通俗易懂。 7.1 关系数据…...

《SpringBoot中间件设计与实战》第1章 什么是中间件
一、写在前面 在互联网应用初期,所有用于支撑系统建设的,框架结构、基础工具、业务逻辑、功能服务包括页面展示等,都是在一个系统中开发完成,最终也只是把系统和数据库部署在同一台服务器上。也就是大多数开发者入门所接触到的 “单体” 系统。 那为什么会有中间件这个玩…...
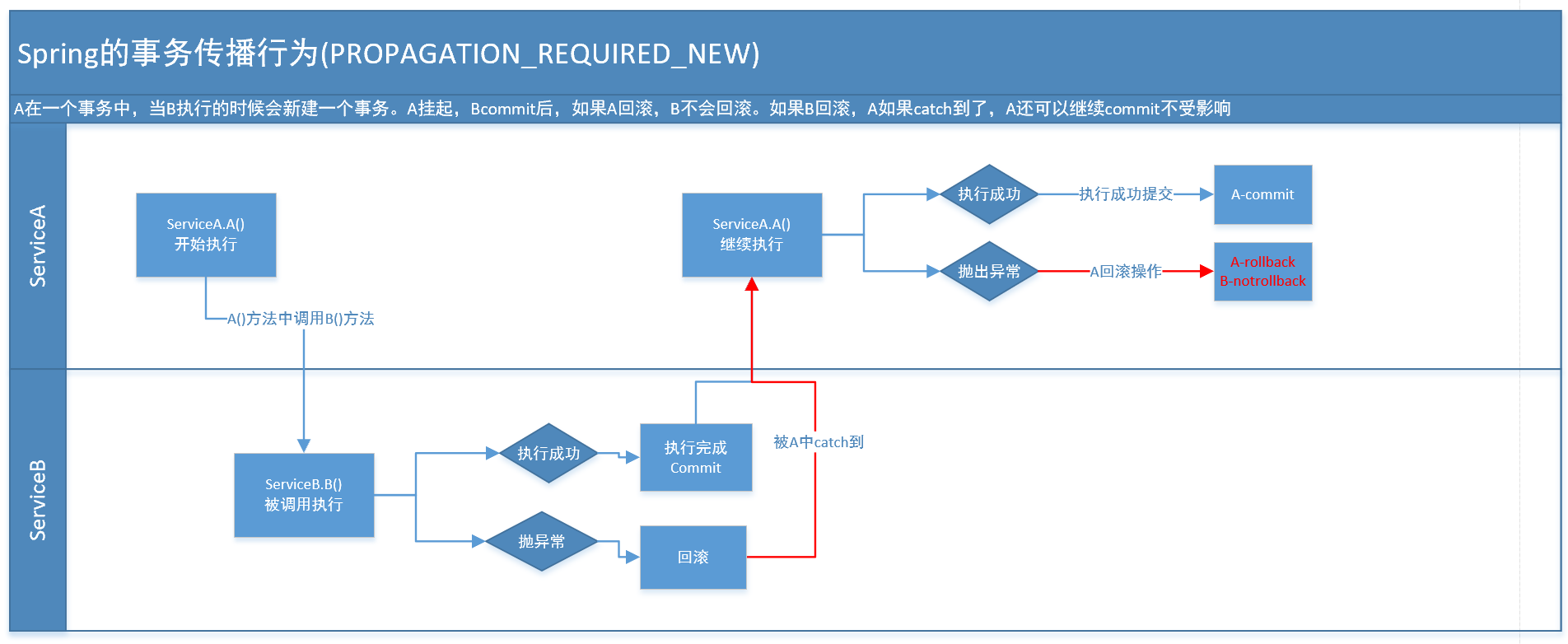
spring常用的事务传播行为
事务传播行为介绍 Spring中的7个事务传播行为: 事务行为 说明 PROPAGATION_REQUIRED 支持当前事务,假设当前没有事务。就新建一个事务 PROPAGATION_SUPPORTS 支持当前事务,假设当前没有事务,就以非事务方式运行 PROPAGATION_MANDATORY…...
【Python】什么是爬虫,爬虫实例
有s表示加密的访问方式 一、初识爬虫 什么是爬虫 网络爬虫,是一种按照一定规则,自动抓取互联网信息的程序或者脚本。由于互联网数据的多样性和资源的有限性,根据用户需求定向抓取相关网页并分析已成为如今主流的爬取策略爬虫可以做什么 你可以…...
)
JavaScript学习笔记(三)
文章目录 第7章:迭代器与生成器1. 迭代器模式2. 生成器 第8章:对象、类与面向对象编程1. 理解对象2. 创建对象3. 继承:依靠原型链实现4. 类class 第10章:函数1. 函数定义的方式有:函数声明、函数表达式、箭头函数&…...
文鼎创智能物联云原生容器化平台实践
作者:sekfung,深圳市文鼎创数据科技有限公司研发工程师,负责公司物联网终端平台的开发,稳定性建设,容器化上云工作,擅长使用 GO、Java 开发分布式系统,持续关注分布式,云原生等前沿技…...

深入了解SpringMVC框架,探究其优缺点、作用以及使用方法
一、什么是Spring MVC SpringMVC是一种基于Java的Web框架,与Spring框架紧密结合,用于开发具备WebApp特性的Java应用程序。Spring MVC是Spring Framework的一部分,因此它具有与Spring框架相同的特性和理念。 二、SpringMVC的优缺点 1. 优点…...
Git教程(一)
1、Git概述 1.1 、Git历史 同生活中的许多伟大事件一样,Git 诞生于一个极富纷争大举创新的年代。Linux 内核开源项目有着为数众广的参与者。绝大多数的 Linux 内核维护工作都花在了提交补丁和保存归档的繁琐事务上(1991-2002年间)…...
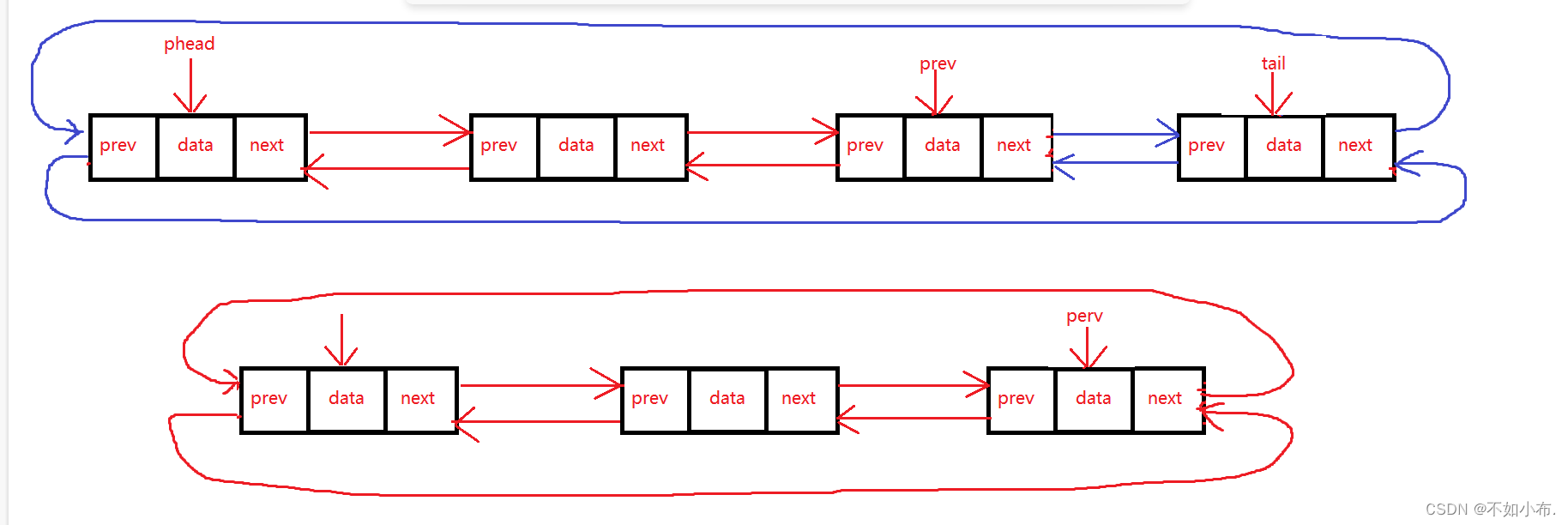
数据结构篇三:双向循环链表
文章目录 前言双向链表的结构功能的解析及实现1. 双向链表的创建2. 创建头节点(初始化)3. 创建新结点4. 尾插5. 尾删6. 头插7. 头删8. 查找9. 在pos位置前插入10. 删除pos位置的结点11. 销毁 代码实现1.ListNode.h2. ListNode.c3. test.c 总结 前言 前面…...
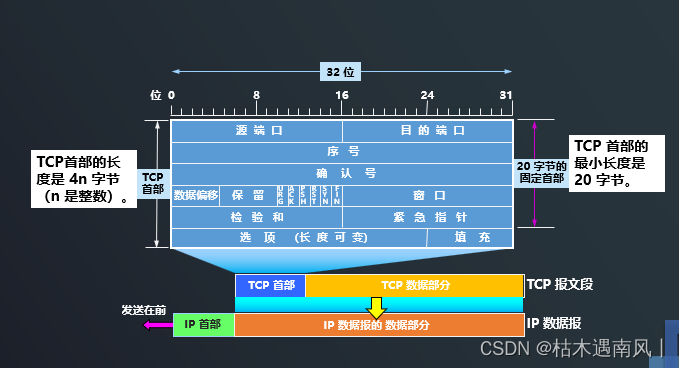
day10 TCP是如何实现可靠传输的
TCP最主要的特点 1、TCP是面向连接的运输层协议。( 每一条TCP连接只能有两个端点(endpoint),每一条TCP连接只能是点对点的(一对一)) 2、TCP提供可靠交付的服务。 3、TCP提供全双工通信。 4…...

Python | 人脸识别系统 — 背景模糊
本博客为人脸识别系统的背景模糊代码解释 人脸识别系统博客汇总:人脸识别系统-博客索引 项目GitHub地址:Su-Face-Recognition: A face recognition for user logining 注意:阅读本博客前请先参考以下博客 工具安装、环境配置:人脸…...

[测试] Phase 1 Notion Draft
新一轮技术发布潮已然到来,工程团队在实际落地过程中遇到的事故与挑战成为关注焦点。近期多个新框架和开源工具陆续上线,开发者们在真实环境下进行了深度实测,结果令人深思。 技术发布背后的工程事故 在某次新框架发布后,团队迅速…...

h2ogpt云原生部署:Kubernetes环境下的完整实践指南
h2ogpt云原生部署:Kubernetes环境下的完整实践指南 【免费下载链接】h2ogpt Private Q&A and summarization of documentsimages or chat with local GPT, 100% private, Apache 2.0. Supports Mixtral, llama.cpp, and more. Demo: https://gpt.h2o.ai/ https:…...

彻底搞懂STM32定时器:PSC、ARR、CNT详解,附精确延时代码---STM32 HAL库专栏
🎬 渡水无言:个人主页渡水无言 ❄专栏传送门: 《linux专栏》《嵌入式linux驱动开发》《linux系统移植专栏》 ❄专栏传送门: 《freertos专栏》 《STM32 HAL库专栏》《linux裸机开发专栏》 ❄专栏传送门:《产品测评专栏》…...

颠覆式照片管理:5大AI引擎重构你的数字记忆库
颠覆式照片管理:5大AI引擎重构你的数字记忆库 【免费下载链接】photoprism Photoprism是一个现代的照片管理和分享应用,利用人工智能技术自动分类、标签、搜索图片,还提供了Web界面和移动端支持,方便用户存储和展示他们的图片集。…...

网盘直链下载助手:打破限速瓶颈,让文件下载飞起来
网盘直链下载助手:打破限速瓶颈,让文件下载飞起来 【免费下载链接】Online-disk-direct-link-download-assistant 可以获取网盘文件真实下载地址。基于【网盘直链下载助手】修改(改自6.1.4版本) ,自用,去推…...
——从错误思路到本质理解(结尾全代码))
用队列实现栈(C语言详解)——从错误思路到本质理解(结尾全代码)
目录 一、问题本质 二、整体结构设计 三、两种核心方法(非常关键) 一、方法一:push时调整(搬运到空队列) 二、方法二:pop时调整(你的方法) 三、两种方法本质对比(重…...

Fish Speech 1.5开发者案例:为微信小程序集成TTS语音播报功能
Fish Speech 1.5开发者案例:为微信小程序集成TTS语音播报功能 1. 引言:当小程序需要“开口说话” 想象一下,你正在开发一个在线教育类微信小程序。课程内容很精彩,但用户长时间盯着屏幕阅读文字,眼睛容易疲劳。如果能…...

Qwen3-ASR-0.6B多场景落地:支持API服务化、桌面客户端、Web嵌入三类部署形态
Qwen3-ASR-0.6B多场景落地:支持API服务化、桌面客户端、Web嵌入三类部署形态 1. 项目简介与核心价值 Qwen3-ASR-0.6B是基于阿里云通义千问团队开源语音识别模型开发的本地智能语音转文字工具。这个工具最大的特点是完全在本地运行,不需要联网ÿ…...

SmallThinker-3B-Preview效果实测:在单线程CPU上完成3K token COT推理耗时<42s
SmallThinker-3B-Preview效果实测:在单线程CPU上完成3K token COT推理耗时<42s 1. 开篇:当推理能力遇见极致轻量 如果你正在寻找一个能在普通电脑上流畅运行,还能进行复杂思考推理的AI模型,那么SmallThinker-3B-Preview的出现…...
)
【2026年滴滴春招- 3月15日 -第二题- 开心食堂】(题目+思路+JavaC++Python解析+在线测试)
题目内容 你开了一家食堂。新的一天的营业从第 000 时刻开始,这一天食堂将迎来 nnn 个顾客,其中第 iii</...