【Ubuntu18.04使用yolov5教程】
- 欢迎大家阅读2345VOR的博客【Ubuntu18.04使用yolov5教程】🥳🥳🥳
- 2345VOR鹏鹏主页: 已获得CSDN《嵌入式领域优质创作者》称号👻👻👻,座右铭:脚踏实地,仰望星空🛹🛹🛹
- 本文章属于《Ubuntu学习》和《ROS机器人学习》
:这里主要是记录Ubuntu下简单使用yolov5测试检测效果的过程,我是使用realsense d435i摄像头的RGB图像。👍👍👍

1. 前言
Ubuntu环境搭建
【经典Ubuntu20.04版本U盘安装双系统教程】
【Windows10安装或重装ubuntu18.04双系统教程】
【Ubuntu同步系统时间】
【Ubuntu中截图工具】
【Ubuntu安装QQ】
【Ubuntu安装后基本配置】
【Ubuntu启动菜单的默认项】
【ubuntu系统中修改hosts配置】
【18.04Ubuntu中解决无法识别显示屏】
【ROS 开发神器 Visual Studio Code 的安装和设置】
【基于Ubuntu18.04+Melodic的realsense D435安装】
【Ubuntu18配置Anaconda深度学习环境】
ROS学习笔记
【1. Ubuntu18.04安装ROS Melodic】
【2. 在Github上寻找安装ROS软件包】
【3. 初学ROS,年轻人的第一个Node节点】
【4. ROS的主要通讯方式:Topic话题与Message消息】
【5. ROS机器人的运动控制】
【6. 激光雷达接入ROS】
【7. ROS 中的 IMU 惯性测量单元消息包】
我在Ubuntu下配置深度环境的过程可参考:
【Ubuntu18配置Anaconda深度学习环境】
本篇文章主要参考:
Ubuntu下使用yolov5
https://github.com/ultralytics/yolov5
这里参考的github上的yolo v5程序版本和功能比较全面,图片、视频、摄像头实时画面都可以使用,可以以这个程序为基础进行修改。
2. yolov5源码配置
源码地址; https://github.com/ultralytics/yolov5

2.1 下载文件
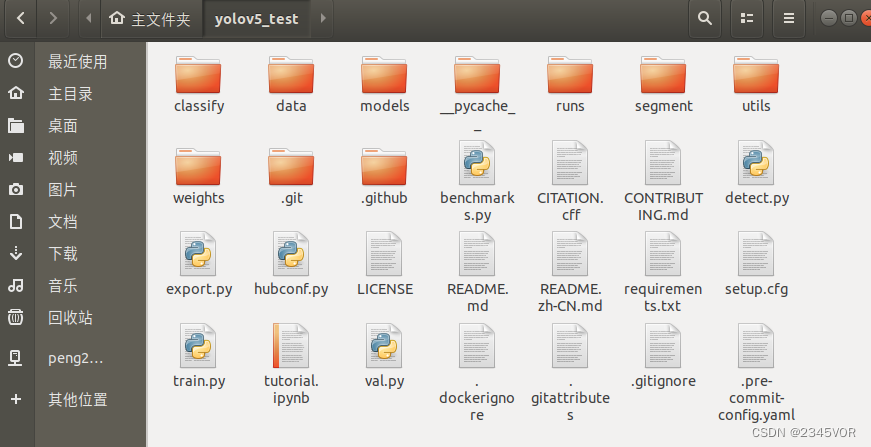
首先使用CTRL+alt+t命令下载文件到~/yolov5_test文件夹下,然后准备开始VScode配置和安装相关依赖
git clone https://github.com/ultralytics/yolov5.git yolov5_test主目录如下文件
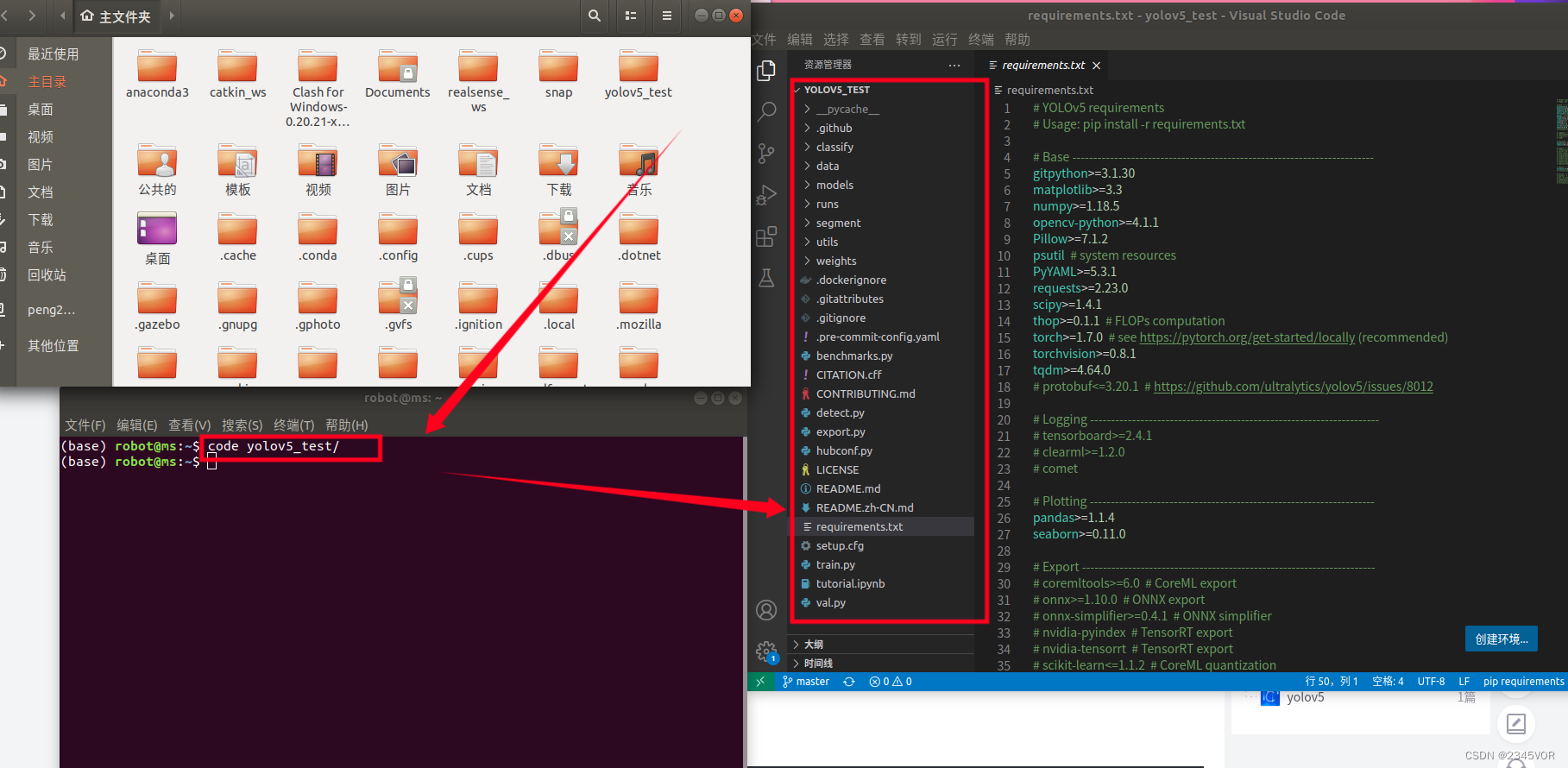
2.2 用VScode打开
进入主目录,打开终端输入code yolo,tab 回车用vscode打开,vscode可参考
【ROS 开发神器 Visual Studio Code 的安装和设置】
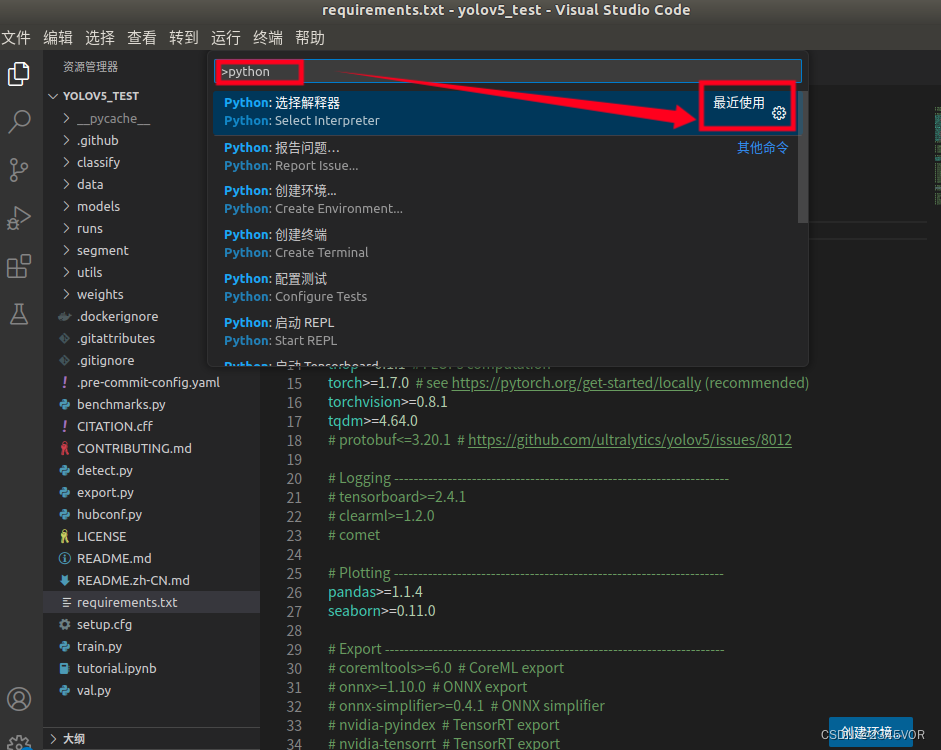
首先使用CTRL+shift+p命令: 打开命令交互面板, 在命令面板中可以输入命令进行搜索(中英文都可以),然后执行。命名面板中可以执行各种命令,包括编辑器自带的功能和插件提供的功能
在打开的命令面板中输入下述命令,如下图所示:
Python: Select Interpreter
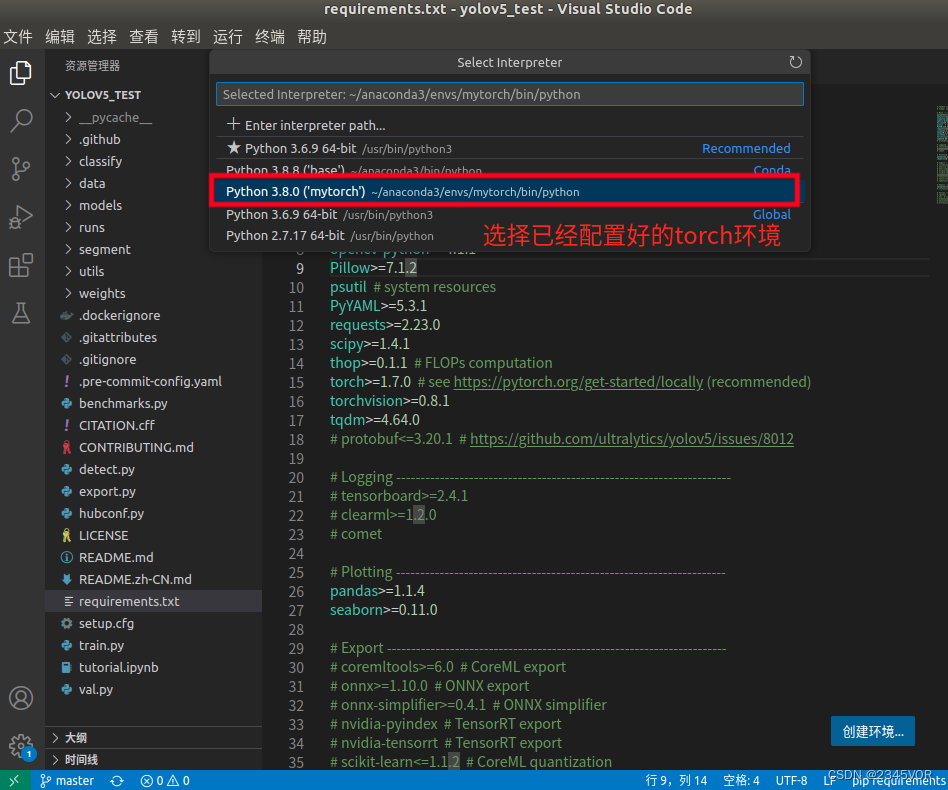
 选择已经配置好的torch环境,可参考
选择已经配置好的torch环境,可参考
【Ubuntu18配置Anaconda深度学习环境】
然后ctrl+shift+`
打开终端
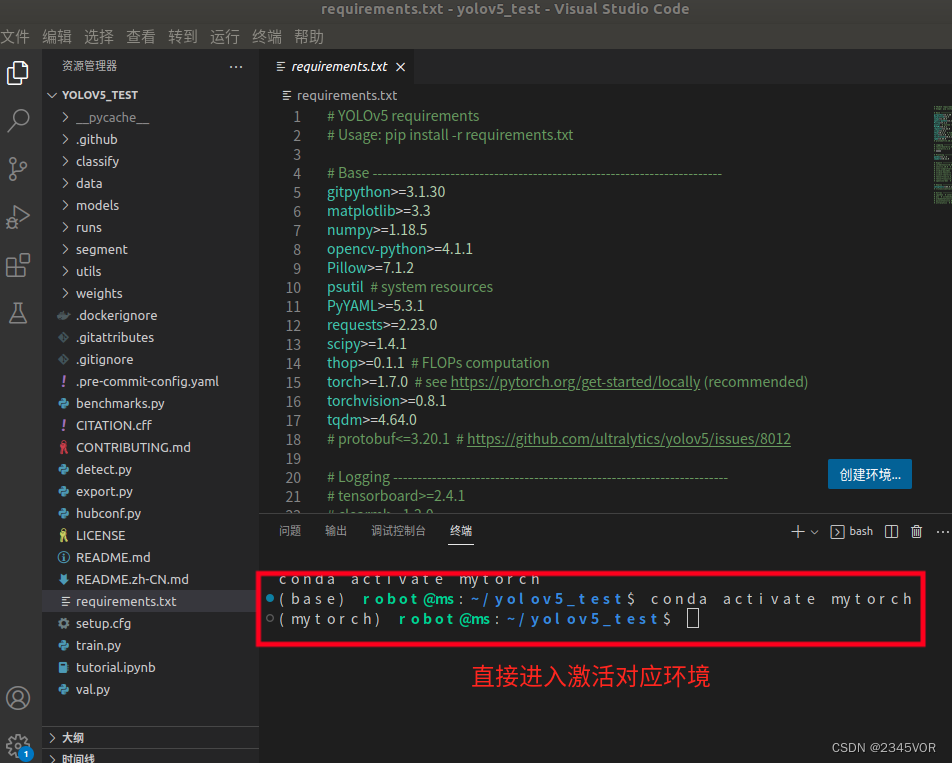 期待下面的操作啦!
期待下面的操作啦!
2.3 安装相关依赖
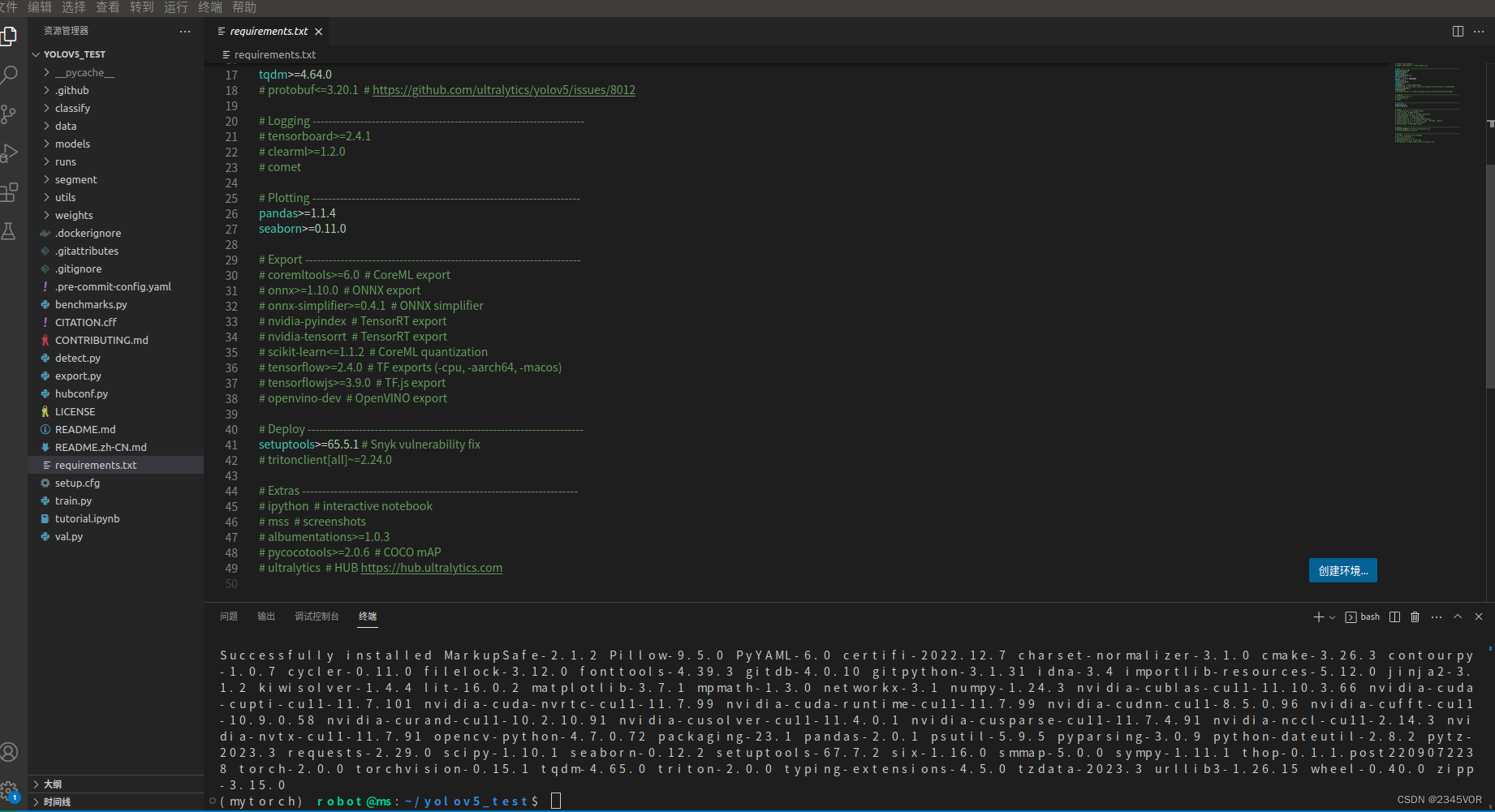
接着上面的操作,在终端中输入下面指令,下载相关依赖。如下是添加了清华镜像,下载速度比国外源快。
pip install -r requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simple --ignore-installed
一定要完全安装,需要下载好几个G的文件包,否则后面实验会报乱七八糟的错误。反馈如下
3. 运行detect例子
3.1 语法说明
详细的可以参考https://github.com/ultralytics/yolov5中的README.md
- source:是选择测试例的来源
$ python detect.py --source 0 # webcamimg.jpg # imagevid.mp4 # videopath/ # directorypath/*.jpg # glob'https://youtu.be/Zgi9g1ksQHc' # YouTube'rtsp://example.com/media.mp4' # RTSP, RTMP, HTTP stream
- weights:是选择模型,如果weights文件夹里有权重则直接使用,没有就下载,PyTorch框架的权重文件后缀为.pt,,也可等运行时自动下载
# weights: yolov5m, yolov5l, yolov5x, custom
python3 detect.py --source ./data/images/ --weights weights/yolov5s.pt
3.2 测试图片
图片在/data/images文件下,分别是如下两张


在终端输入如下
clear
python3 detect.py --source ./data/images/ --weights weights/yolov5s.pt
效果:
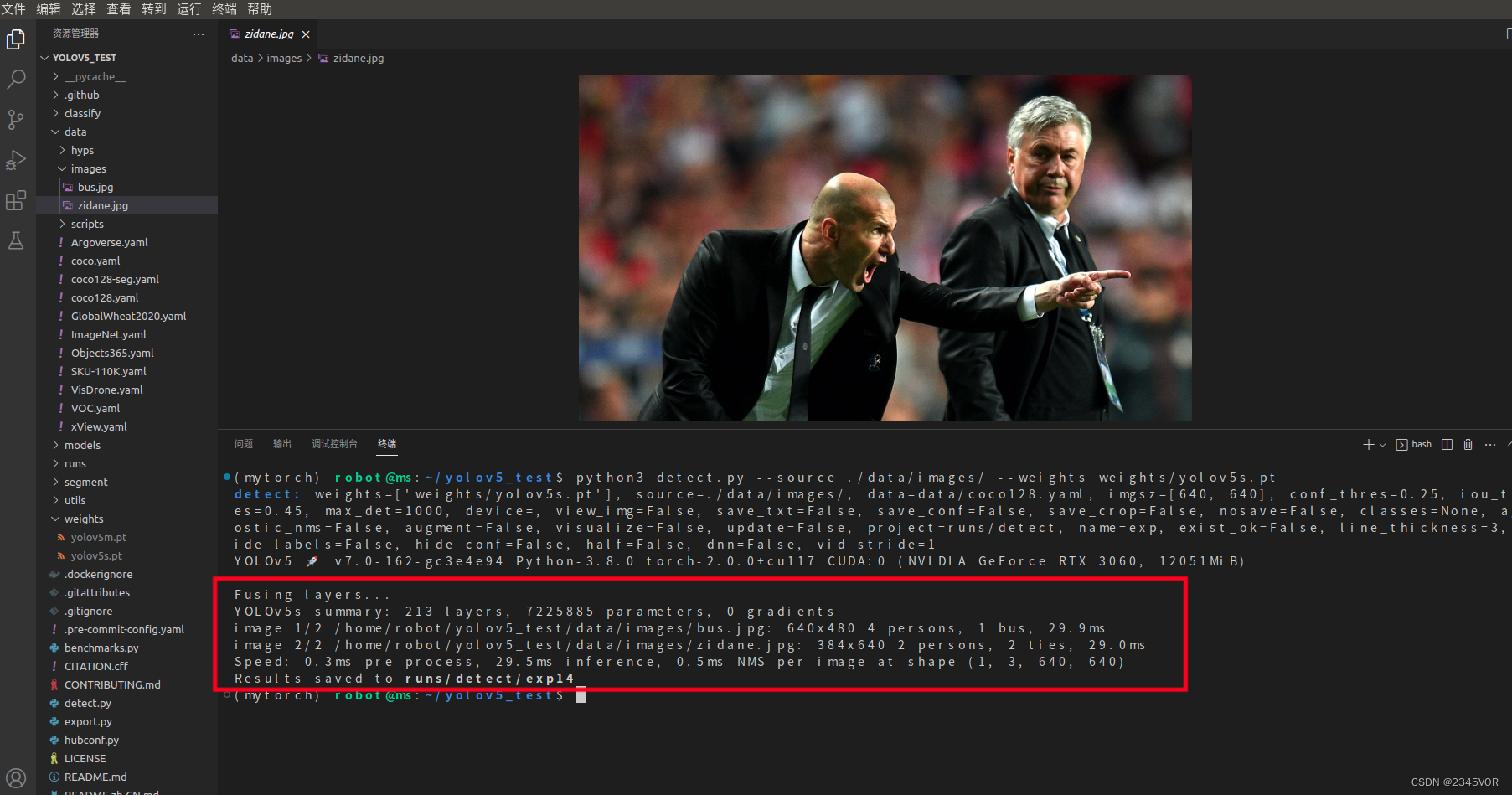
(mytorch) robot@ms:~/yolov5_test$ python3 detect.py --source ./data/images/ --weights weights/yolov5s.pt
detect: weights=['weights/yolov5s.pt'], source=./data/images/, data=data/coco128.yaml, imgsz=[640, 640], conf_thres=0.25, iou_thres=0.45, max_det=1000, device=, view_img=False, save_txt=False, save_conf=False, save_crop=False, nosave=False, classes=None, agnostic_nms=False, augment=False, visualize=False, update=False, project=runs/detect, name=exp, exist_ok=False, line_thickness=3, hide_labels=False, hide_conf=False, half=False, dnn=False, vid_stride=1
YOLOv5 🚀 v7.0-162-gc3e4e94 Python-3.8.0 torch-2.0.0+cu117 CUDA:0 (NVIDIA GeForce RTX 3060, 12051MiB)Fusing layers...
YOLOv5s summary: 213 layers, 7225885 parameters, 0 gradients
image 1/2 /home/robot/yolov5_test/data/images/bus.jpg: 640x480 4 persons, 1 bus, 29.9ms
image 2/2 /home/robot/yolov5_test/data/images/zidane.jpg: 384x640 2 persons, 2 ties, 29.0ms
Speed: 0.3ms pre-process, 29.5ms inference, 0.5ms NMS per image at shape (1, 3, 640, 640)
Results saved to runs/detect/exp14
检测出图片内容如下,效果还不错,一张0.03秒,基本都识别出来了。
image 1/2 /home/robot/yolov5_test/data/images/bus.jpg: 640x480 4 persons, 1 bus, 29.9ms
image 2/2 /home/robot/yolov5_test/data/images/zidane.jpg: 384x640 2 persons, 2 ties, 29.0ms
Speed: 0.3ms pre-process, 29.5ms inference, 0.5ms NMS per image at shape (1, 3, 640, 640)
3.3 测试RealSense摄像头实时图像
RealSense摄像头可以采用以下教程配置,主要调用SDK
的图像配置。
【基于Ubuntu18.04+Melodic的realsense D435安装】
在上面终端输入如下,首先查看USB占用情况
lsusb

- 红外画面测试及效果
在上面终端输入如下,红外画面测试
python3 detect.py --source 2 --weights weights/yolov5m.pt
效果
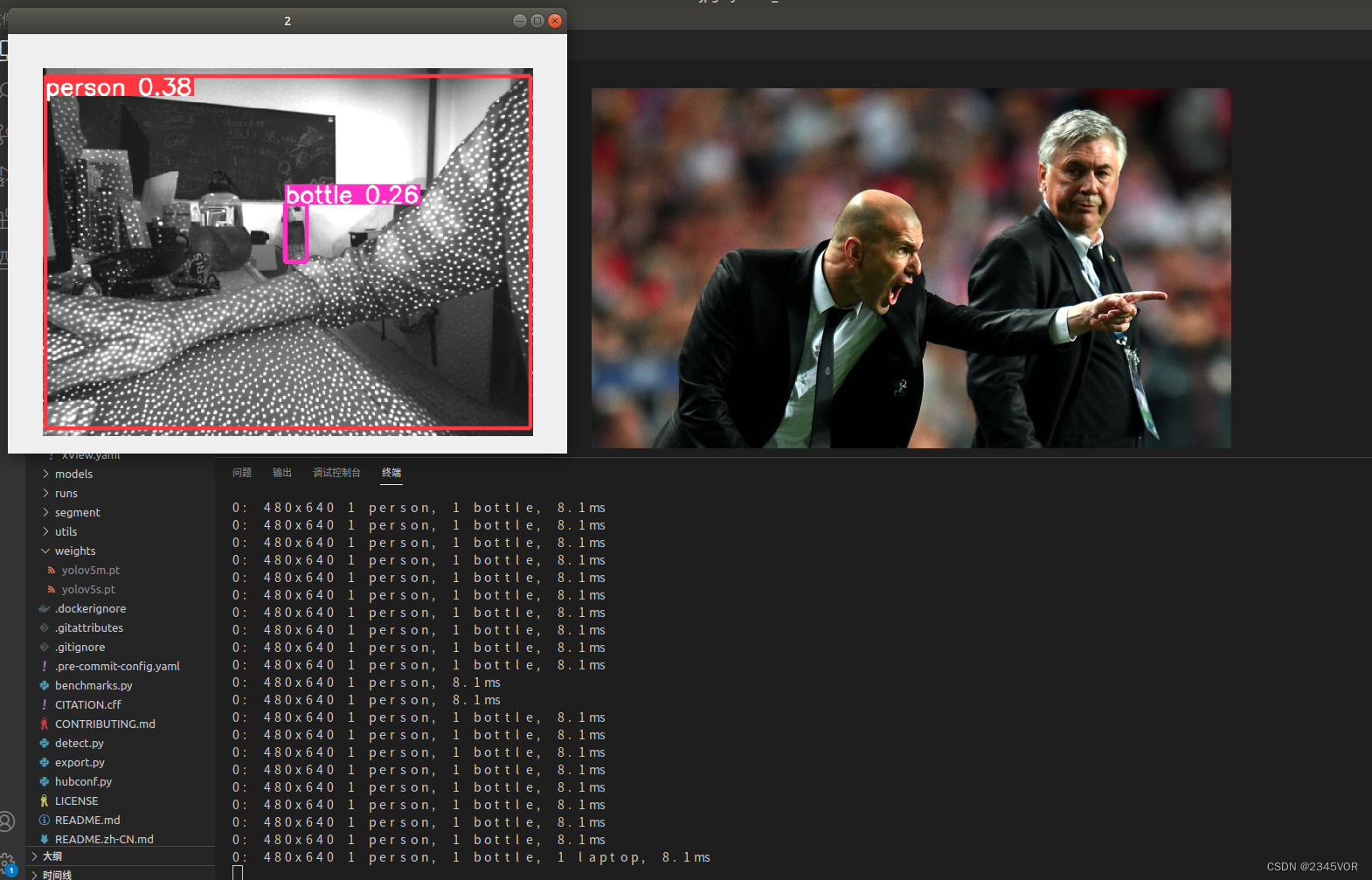
ctrl+c中止当前终端任务
- RGB画面测试及效果
在上面终端输入如下,RGB画面测试
python3 detect.py --source 4 --weights weights/yolov5m.pt
效果
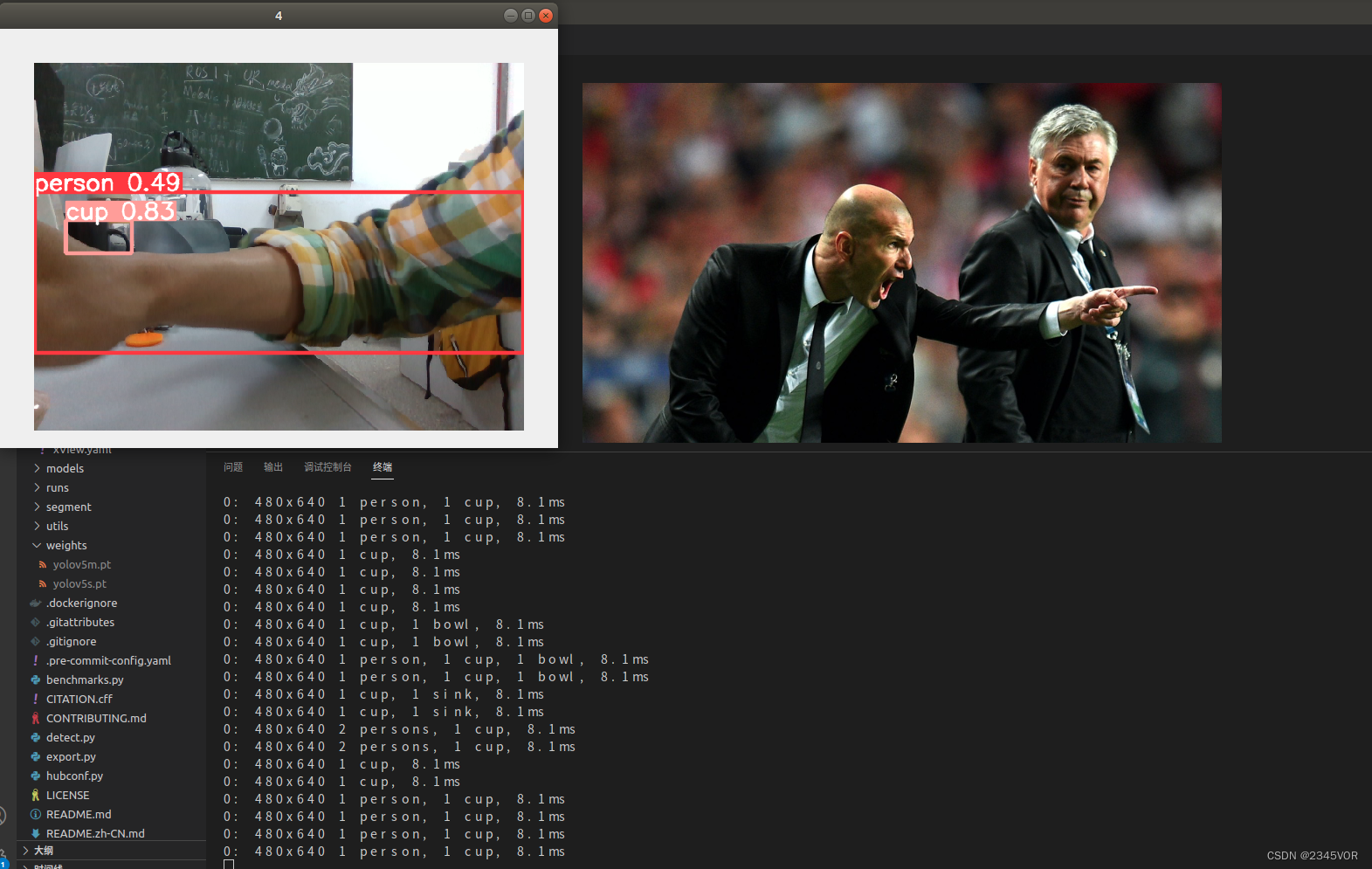
注意事项:
- 对于深度相机,不能像普通的usb相机一样,opencv打开id直接为0。
- 对于id为2时打开的是红外的画面,id为4打开的是RBG画面。
相关文章:
【Ubuntu18.04使用yolov5教程】
欢迎大家阅读2345VOR的博客【Ubuntu18.04使用yolov5教程】🥳🥳🥳2345VOR鹏鹏主页: 已获得CSDN《嵌入式领域优质创作者》称号👻👻👻,座右铭:脚踏实地,仰望星空…...

CocoaPods如何发布新版本的Pod Library
当我们修改了一个Pod Library中的代码时,如何让依赖该库的项目能更新到最新代码,步骤如下: 假设现在修改了SamplePod(Pod名称)的代码,希望将最新版本更新到1.0.1,目前版本是1.0.0 修改SamplePo…...
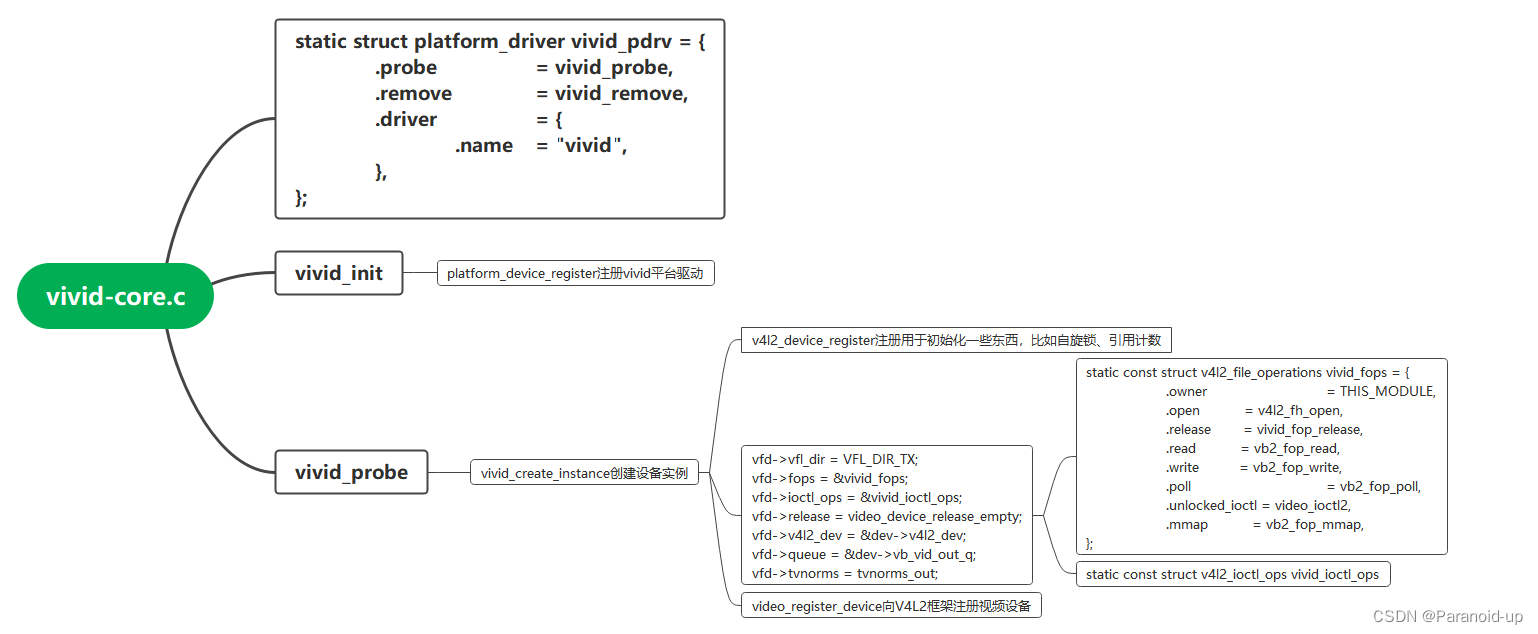
v4l2框架
v4l2框架 文章目录 v4l2框架框架1.硬件相关层uvc_probeuvc_register_chainsuvc_register_termsuvc_register_video 2.核心层__video_register_device 3.虚拟视频驱动vivid分析入口vivid_init注册vivid平台驱动vivid_probevivid_create_instance 框架 1.硬件相关层 driver/medi…...

vue项目中生成LICENSE文件
vue项目中生成LICENSE文件 简介 LICENSE 文件是一个文本文件,它包含了你的项目所使用的开源软件的许可证信息。 在开发过程中,我们经常会使用到各种各样的第三方开源软件,这些软件是有版权和许可证的,我们在使用时需要遵循它们的…...

NewBing最新更新使用体验(无需等待人人可用)
NewBing最新更新使用体验 微软Bing爆炸级更新!无需等待人人可用! 今天,微软突然官宣全面开放BingChat: 无需任何等待。只需注册一个账户,首页即可体验。 NewBing最新更新新特性官方文档 https://www.microsoft.com/en-…...

欧拉奔赴品牌2.0时代,女性汽车真实用户需求被定义?
每年的上海国际汽车工业展览会,不仅是各大汽车品牌的技术“秀场”,也是品牌的营销“修罗场”。今年上海车展出圈的营销事件特别多,热度甚至一再蔓延到汽车行业外,其中欧拉也贡献了不少流量。 据了解,在2023上海车展欧…...

机器视觉工程师,听我一句劝,别去外包,干了三年,废了....对女人没了兴趣
外包三年,干了就废,最后只会安装软件。 对于年轻人来说,需要工作,更需要生活。 对于年轻人来说,需要努力,更需要“面包”。 对于年轻人来说,需要规划,更需要发展。 对于外包,虽说废的不是很彻底,但那三年几乎是出差了三年、玩了三年、荒废了三年,那三年,技术…...
)
PBDB Data Service:Special parameters(特殊参数)
Special parameters(特殊参数) 描述参数1:下列参数在大部分请求中可用2:以下参数只与文本格式(.csv, .tsv, .txt)相关 描述 本文将介绍一组特殊参数,它们几乎可以在此数据服务的任何请求中使用…...
腾讯云轻量应用服务器使用限制说明(十大限制)
腾讯云轻量应用服务器和云服务器CVM相比具有一些限制,比如轻量服务器不支持更换内网IP地址,轻量服务器只能套餐整体升级且不支持降配,轻量不支持用户自定义配置私有网络VPC,还有如实例配额、云硬盘配额、备案限制和内网连通性等限…...

Python每日一练(20230507) 丑数I\II\III、超级丑数
目录 1. 丑数 Ugly Number I 2. 丑数 Ugly Number II 3. 丑数 Ugly Number III 4. 超级丑数 Super Ugly Number 🌟 每日一练刷题专栏 🌟 Golang每日一练 专栏 Python每日一练 专栏 C/C每日一练 专栏 Java每日一练 专栏 1. 丑数 Ugly Number I …...

K8S常见异常事件与解决方案
集群相关 Coredns容器或local-dns容器重启 集群中的coredns组件发生重启(重新创建),一般是由于coredns组件压力较大导致oom,请检查业务是否异常,是否存在应用容器无法解析域名的异常。 如果是local-dns重启,说明local-dns的性能…...
测试5年从中兴 15K 跳槽去腾讯 32K+16,啃完这份笔记你也可以
粉丝小王转行做测试已经是第5个年头,一直是一个不温不火的小职员,本本分分做着自己的事情,觉得自己的工作已经遇到了瓶颈,一个偶然的机会,获得了一份软件测试全栈知识点学习笔记,通过几个月的学习ÿ…...

CentOS 临时IP与永久IP配置
CentOS 临时IP与永久IP配置 CentOS是一种广泛使用的Linux发行版,通常用于服务器和企业网络中。在安装和配置CentOS服务器时,必须为其配置IP地址以便访问。在本文中,我们将介绍如何在CentOS中配置临时IP地址和永久IP地址。 临时IP地址配置 临…...

集线器、网桥、交换机
一.集线器 集线器(HUB),它是工作在物理层的设备, 由于它只是工作在物理层的设备,所以它并不关心也不可能关心OSI上面几层所涉及的,它的工作机制流程是:从一个端口接收到数据包时,会在…...

api接口怎么用?
API接口是一种应用程序编程接口,它允许不同的软件应用程序之间进行通信和交互。通过使用API接口,开发人员可以轻松地将自己的应用程序集成到其他应用程序中,从而实现更丰富的功能和更好的用户体验。 API接口的使用方法一般包括以下几个步骤&a…...

Bad minute in crontab?
ERROR 详细 修改crontab出现如下错误: crontab: installing new crontab “/tmp/crontab.MswKCq”:0: bad minute errors in crontab file, can’t install. Do you want to retry the same edit? n crontab: edits left in /tmp/crontab.MswKCq 根因定位 通过…...
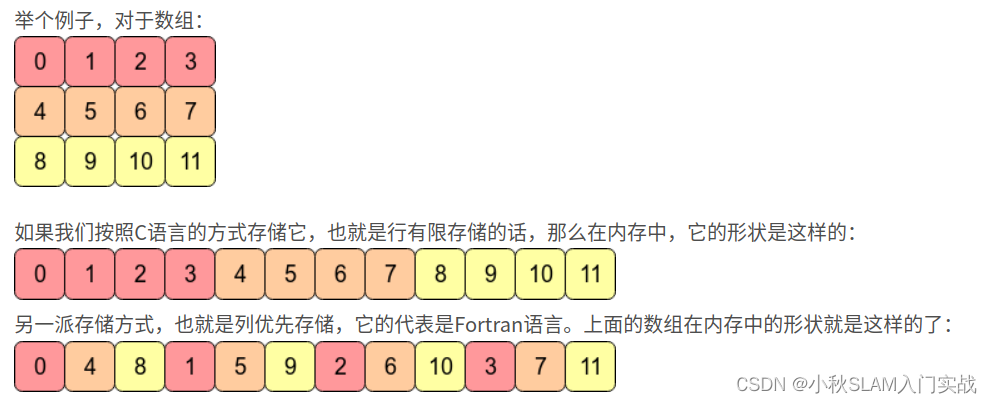
【二维矩阵如何存储在一维数组中(行优先和列优先)】
列优先和行优先的性能取决于具体的硬件架构和代码访问模式。在现代计算机中,内存访问的局部性(locality of reference)对性能至关重要。局部性分为两类:时间局部性(temporal locality)和空间局部性(spatial locality)。时间局部性表示最近访问过的数据项很可能在不久的…...
使用Gradle7.6+SpringBoot 3.0+java17创建微服务项目
系列文章目录 学习新版本,菜鸟一枚 会持续更新的 文章目录 系列文章目录前言一、搭建项目1.1、创建git仓库1.1.1、登录gitee,新建仓库1.1.2、得到如下命令(新建仓库使用创建git仓库 即可) 1.2、使用IDEA创建项目1.2.1、开发工具1.…...
pandas使用教程:apply函数、聚合函数agg和transform
文章目录 apply函数调用apply函数描述性统计apply函数lambda自定义 聚合函数aggregate/agg用字典实现聚合 transform函数多函数 Transform 重置索引与更换标签行重置索引行和列同时重置索引 apply函数调用 apply函数描述性统计 import numpy as np df.loc[:,Q1:Q4].apply(np.…...

使用rasterio裁剪遥感影像
文章目录 0. 数据准备1. polygon的坐标系转换1.1 polygon生成1.1.1 输入数据是shapefile1.1.2 输入数据是polygon 1.2 搞清楚遥感的坐标系和polygon的坐标系(重点)1.3 开始转换 2. 基于polygon的遥感影像裁剪2.1 基础裁剪方法2.1.1 使用rasterio保存2.1.2 使用numpy保存2.2 多线…...

IDEA运行Tomcat出现乱码问题解决汇总
最近正值期末周,有很多同学在写期末Java web作业时,运行tomcat出现乱码问题,经过多次解决与研究,我做了如下整理: 原因: IDEA本身编码与tomcat的编码与Windows编码不同导致,Windows 系统控制台…...
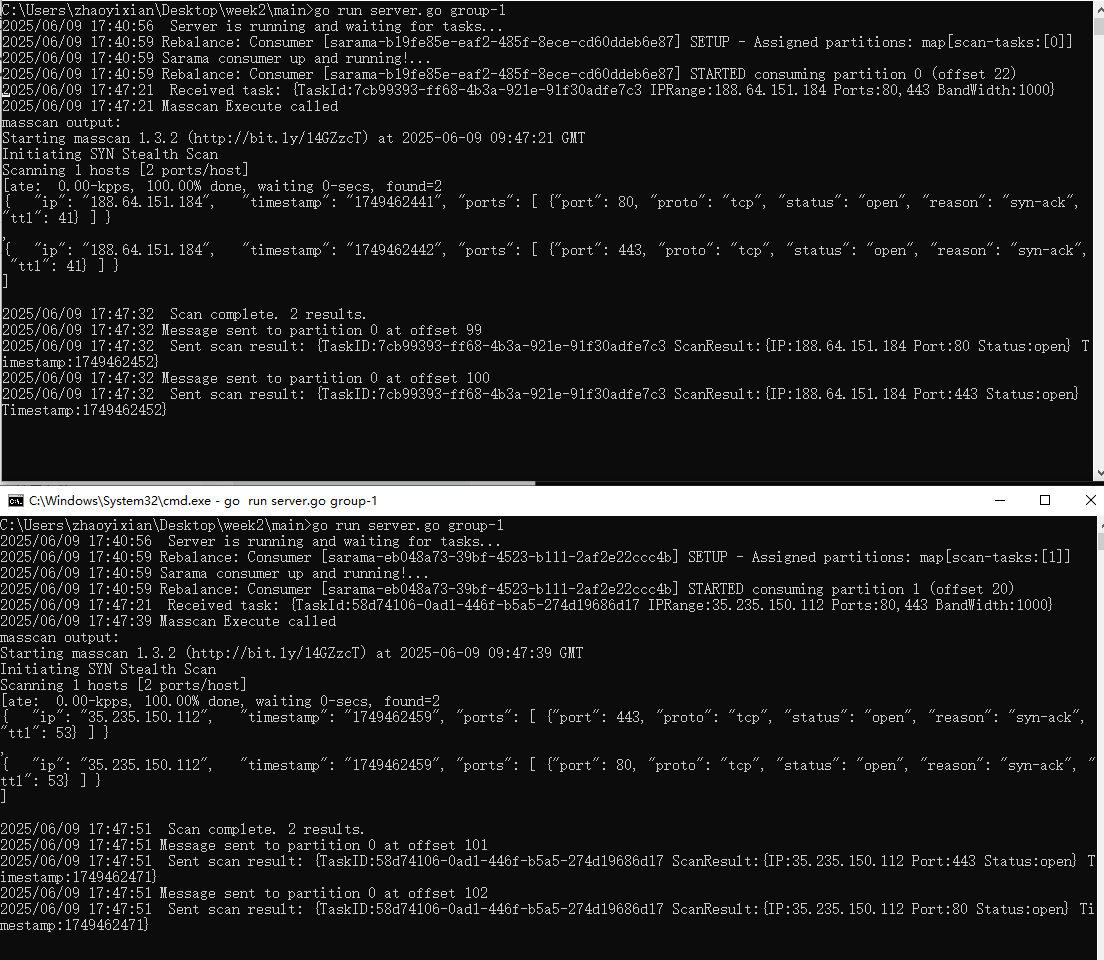
【kafka】Golang实现分布式Masscan任务调度系统
要求: 输出两个程序,一个命令行程序(命令行参数用flag)和一个服务端程序。 命令行程序支持通过命令行参数配置下发IP或IP段、端口、扫描带宽,然后将消息推送到kafka里面。 服务端程序: 从kafka消费者接收…...
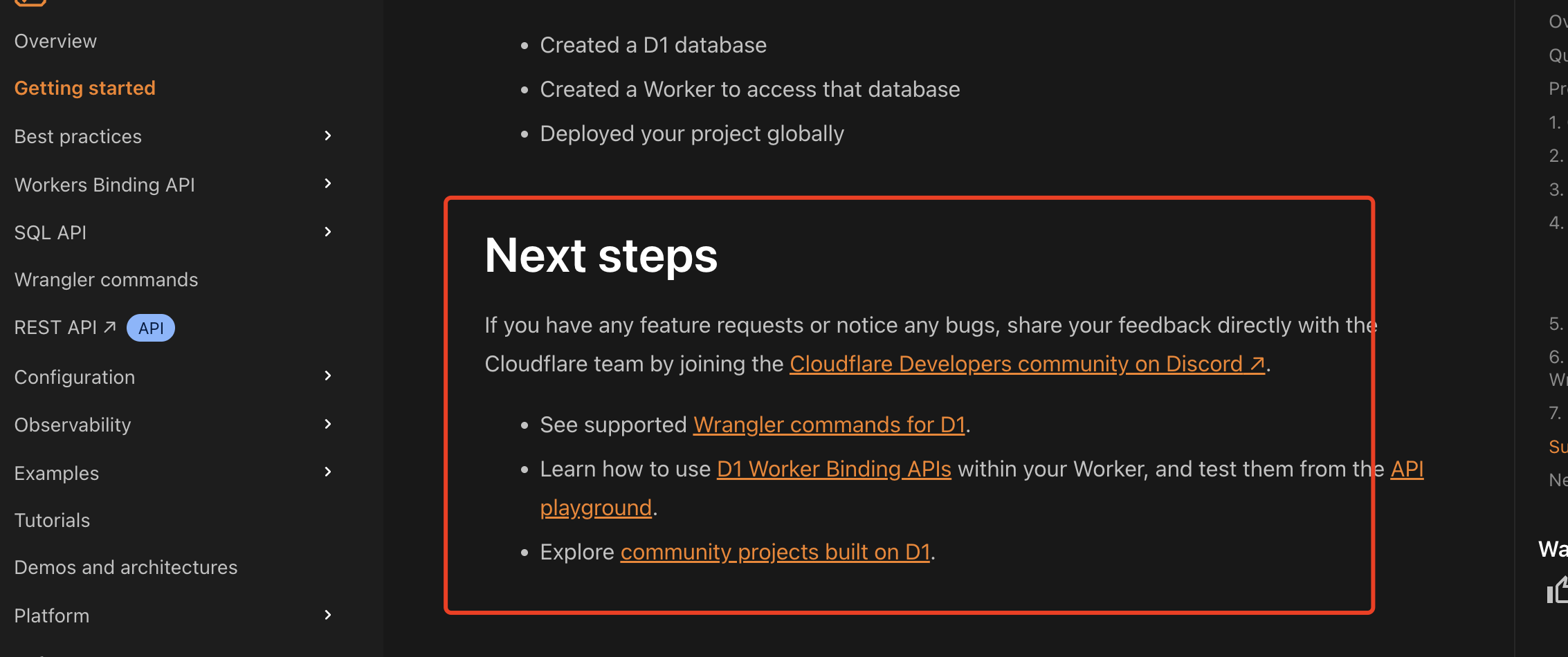
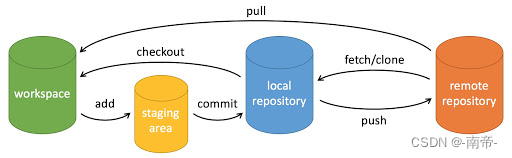
通过Wrangler CLI在worker中创建数据库和表
官方使用文档:Getting started Cloudflare D1 docs 创建数据库 在命令行中执行完成之后,会在本地和远程创建数据库: npx wranglerlatest d1 create prod-d1-tutorial 在cf中就可以看到数据库: 现在,您的Cloudfla…...

HTML前端开发:JavaScript 常用事件详解
作为前端开发的核心,JavaScript 事件是用户与网页交互的基础。以下是常见事件的详细说明和用法示例: 1. onclick - 点击事件 当元素被单击时触发(左键点击) button.onclick function() {alert("按钮被点击了!&…...
蓝桥杯3498 01串的熵
问题描述 对于一个长度为 23333333的 01 串, 如果其信息熵为 11625907.5798, 且 0 出现次数比 1 少, 那么这个 01 串中 0 出现了多少次? #include<iostream> #include<cmath> using namespace std;int n 23333333;int main() {//枚举 0 出现的次数//因…...

Xen Server服务器释放磁盘空间
disk.sh #!/bin/bashcd /run/sr-mount/e54f0646-ae11-0457-b64f-eba4673b824c # 全部虚拟机物理磁盘文件存储 a$(ls -l | awk {print $NF} | cut -d. -f1) # 使用中的虚拟机物理磁盘文件 b$(xe vm-disk-list --multiple | grep uuid | awk {print $NF})printf "%s\n"…...
MySQL 知识小结(一)
一、my.cnf配置详解 我们知道安装MySQL有两种方式来安装咱们的MySQL数据库,分别是二进制安装编译数据库或者使用三方yum来进行安装,第三方yum的安装相对于二进制压缩包的安装更快捷,但是文件存放起来数据比较冗余,用二进制能够更好管理咱们M…...

【无标题】路径问题的革命性重构:基于二维拓扑收缩色动力学模型的零点隧穿理论
路径问题的革命性重构:基于二维拓扑收缩色动力学模型的零点隧穿理论 一、传统路径模型的根本缺陷 在经典正方形路径问题中(图1): mermaid graph LR A((A)) --- B((B)) B --- C((C)) C --- D((D)) D --- A A -.- C[无直接路径] B -…...

Redis:现代应用开发的高效内存数据存储利器
一、Redis的起源与发展 Redis最初由意大利程序员Salvatore Sanfilippo在2009年开发,其初衷是为了满足他自己的一个项目需求,即需要一个高性能的键值存储系统来解决传统数据库在高并发场景下的性能瓶颈。随着项目的开源,Redis凭借其简单易用、…...

Caliper 配置文件解析:fisco-bcos.json
config.yaml 文件 config.yaml 是 Caliper 的主配置文件,通常包含以下内容: test:name: fisco-bcos-test # 测试名称description: Performance test of FISCO-BCOS # 测试描述workers:type: local # 工作进程类型number: 5 # 工作进程数量monitor:type: - docker- pro…...