orin Ubuntu 20.04 配置 Realsense-ROS
librealsense安装
sudo apt-get install libudev-dev pkg-config libgtk-3-dev
sudo apt-get install libusb-1.0-0-dev pkg-config
sudo apt-get install libglfw3-dev
sudo apt-get install libssl-dev
sudo apt-get install ros-noetic-ddynamic-reconfigure
二进制安装librealsense
sudo apt-key adv --keyserver keys.gnupg.net --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo bionic main" -u
sudo apt-get install librealsense2-utils
sudo apt-get install librealsense2-dev
拉取librealsense
git clone https://github.com/IntelRealSense/librealsense.git
//也可以指定版本
//git clone -b v2.50.0 https://github.com/IntelRealSense/librealsense.git
//sudo chmod u+x ./installLibrealsense.sh
//./installLibrealsense.sh
cd librealsense
mkdir build
cd build
cmake ../ -DBUILD_EXAMPLES=true
make
sudo make install
realsense-viewer
Cloning into ‘libcurl’…
error: RPC failed; HTTP 408 curl 22 The requested URL returned error: 408
fatal: the remote end hung up unexpectedly
直接去 https://github.com/curl/curl 下载curl.zip。
注释掉 ~/librealsense/CMake 文件下的 external_libcurl.cmake 的 GIT_REPOSITORY "git://github.com/curl/curl.git" 。即在 GIT_REPOSITORY "git://github.com/curl/curl.git"前加#。
并将提前下载后的 curl.zip 解压后 改名为 libcurl ,放入到 ~/librealsense/build/third-party。
由此可跳过git clone libcurl 失败的问题。
ROS包安装
cd ~/catkin_ws/src
git clone https://github.com/IntelRealSense/realsense-ros.git
git checkout ros1-legacy
git branch
cd ~/catkin_ws && catkin_make
roslaunch realsense2_camera demo_pointcloud.launch
roslaunch realsense2_camera rs_camera.launch
[ INFO] [1683620250.396558236]: Done Setting Dynamic reconfig parameters.
/opt/ros/noetic/lib/nodelet/nodelet: symbol lookup error: /home/bitcq/fast-drone-250/devel/lib//librealsense2_camera.so: undefined symbol: _ZN2cv3MatC1Ev
or
Could not find a package configuration file provided by “OpenCV“
未定义标识符undefined symbol: _ZN2cv3MatC1Ev。猜测是OpenCV库的问题,未找到链接库。
先在终端输入命令查找路径
locate OpenCVConfig.cmake
OpenCVConfig.cmake所在路径为/usr/lib/aarch64-linux-gnu/cmake/opencv4/OpenCVConfig.cmake
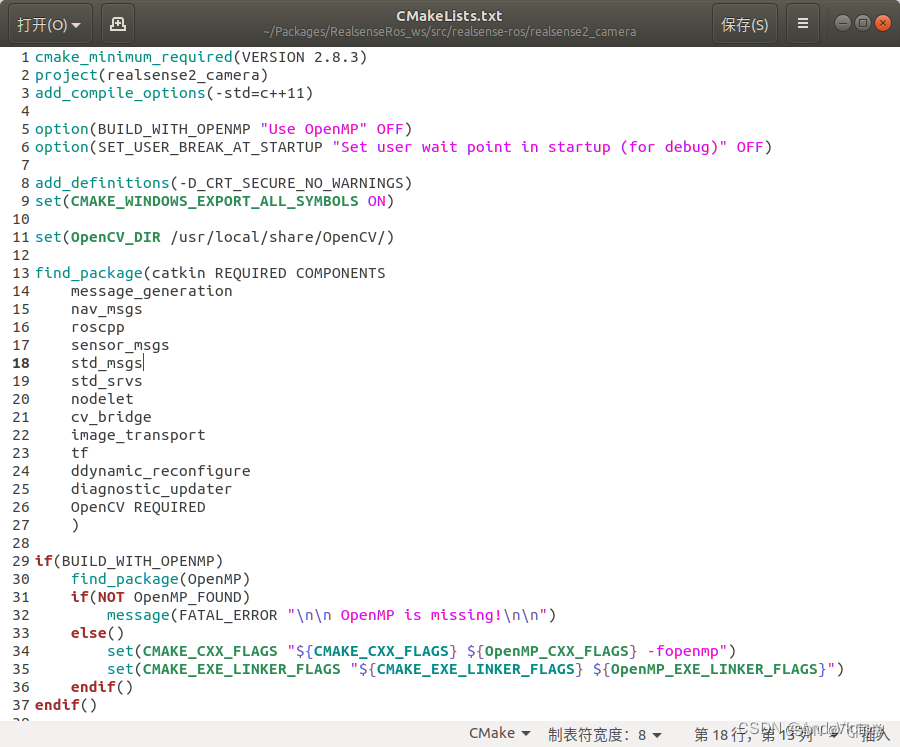
打开realsense-ros的功能包文件夹下 realsense2_camera 文件夹下的 CmakeLists.txt文件,做出如下修改:
添加
set(OpenCV_DIR /usr/lib/aarch64-linux-gnu/cmake/opencv4)到find_package前,添加OpenCV REQUIRED到find_package里
set(OpenCV_DIR /usr/lib/aarch64-linux-gnu/cmake/opencv4)
find_package(catkin REQUIRED COMPONENTSmessage_generationnav_msgsroscppsensor_msgsstd_msgsstd_srvsnodeletcv_bridgeimage_transporttfddynamic_reconfigurediagnostic_updaterOpenCV REQUIRED)
 添加${OpenCV_LIBS}到目标链接库里
添加${OpenCV_LIBS}到目标链接库里
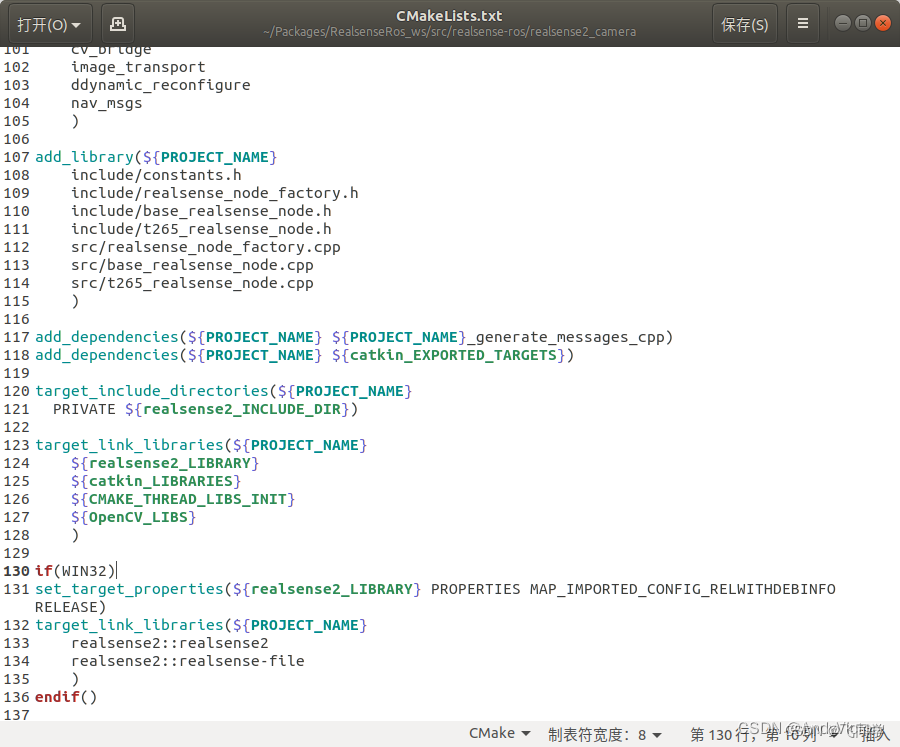
target_link_libraries(${PROJECT_NAME}${realsense2_LIBRARY}${catkin_LIBRARIES}${CMAKE_THREAD_LIBS_INIT}${OpenCV_LIBS})
[ WARN] [1683681450.133423931]: Hardware Notification:Depth stream start failure,1.68368e+12,Error,Hardware Error
将深度相机分辨率设置为与RGB相机相同即可
<arg name="depth_width" default="1280"/><arg name="depth_height" default="720"/><arg name="enable_depth" default="true"/>多主机ROS通信
export ROS_HOSTNAME=[master_host_ip]
export ROS_MASTER_URI=http://[host_ip]:11311
rgbd_launch是一组打开RGBD设备,并load 所有nodelets转化 raw depth/RGB/IR 流到深度图(depth image), 视差图(disparity image)和点云(point clouds)的launch文件集。
sudo apt-get install ros-noetic-rgbd-launch
相关文章:
orin Ubuntu 20.04 配置 Realsense-ROS
librealsense安装 sudo apt-get install libudev-dev pkg-config libgtk-3-dev sudo apt-get install libusb-1.0-0-dev pkg-config sudo apt-get install libglfw3-dev sudo apt-get install libssl-dev sudo apt-get install ros-noetic-ddynamic-reconfigure二进制安装libr…...

MyBatis基础知识点总结
MyBatis了解 MyBatis 是什么? MyBatis 是支持定制化 SQL、存储过程以及高级映射的优秀的持久层框架 MyBatis 避免了几乎所有的 JDBC 代码和手动设置参数以及获取结果集 MyBatis 可以使用简单的XML或注解用于配置和原始映射,将接口和Java的 POJO&#x…...
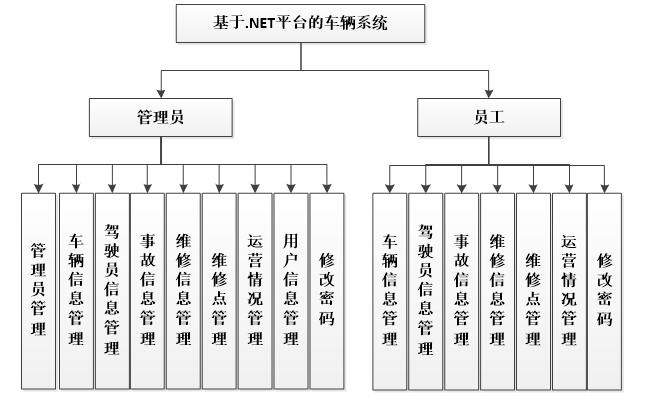
校园企业车辆维修报修管理系统设计与开发
本研究课题重点主要包括了下面几大模块:在本基于.net平台的车辆系统中分为管理员和用户2个模块,主要功能包括管理员信息管理,车辆信息管理,驾驶员信息管理,事故信息管理,维修信息管理,维修点管理…...
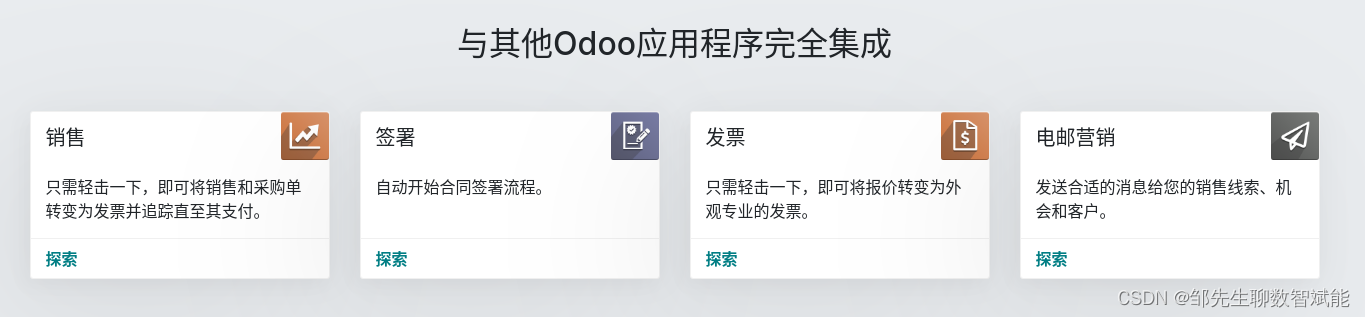
【企业信息化】第1集 免费开源ERP: Odoo 16 CRM客户关系管理系统
文章目录 前言一、概览二、使用功能1.加快销售速度2.销售线索3.机会4.客户5.高效沟通6.报告7.集成 三、总结 前言 世界排名第一的免费开源ERP: Odoo 16 CRM客户关系管理系统。真正以客户为中心的CRM。 一、概览 获得准确预测 使用可操作数据,以做出更好的决定。 获…...

Flink创建Hudi的Sink动态表
工厂类 HoodieTableFactory 提供的创建动态表接口 createDynamicTableSource 和 createDynamicTableSink,对应的源码文件为:https://github.com/apache/hudi/blob/master/hudi-flink-datasource/hudi-flink/src/main/java/org/apache/hudi/table/HoodieT…...

人脸识别技术的安全性及其应用探讨
随着科技的不断发展,人脸识别技术已经成为了一个热门话题。人脸识别系统的出现,给人们的生活带来了极大的便利,同时也为一些犯罪分子提供了方便。因此,人脸识别技术的安全性和可靠性一直备受关注。 一、人脸识别技术的原理 人脸识…...
老域名查询工具- 在线域名批量查询工具
域名批量查询工具 域名批量查询工具是一种帮助用户快速查询多个域名信息的工具,通常能够自动扫描一组域名的WHOIS信息、DNS、IP地址、服务器等各种信息,并提供快速的结果反馈。 以下是域名批量查询工具主要的优点: 提高工作效率:…...
JimuReport - 积木报表(一款免费Web报表工具)
一款免费的数据可视化报表,含报表和大屏设计,像搭建积木一样在线设计报表!功能涵盖,数据报表、打印设计、图表报表、大屏设计等! Web 版报表设计器,类似于excel操作风格,通过拖拽完成报表设计。…...
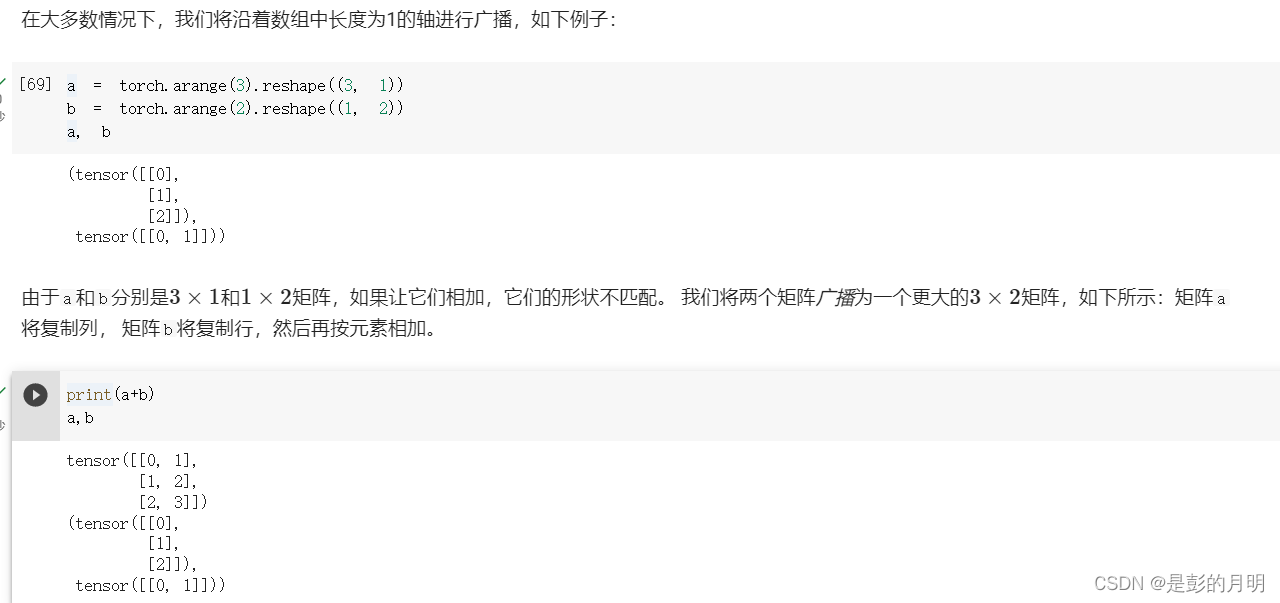
01-数据操作+数据预处理
1.n维数组,也称为张量(tensor):tensor和ndarray没有本质区别。tensor是有数学上的严格定义,ndarray是计算机描述的;张量表示一个由数值组成的数组,这个数组可能有多个维度; 无论使用…...

macOS本地python环境/vscode/导入python包/设置python解释器
查看macbook本地是否有python环境 输入python或者python3,退出python环境使用exit(),别忘了括号 没有的话去官网安装https://www.python.org/ 2. 安装vscode 官网https://code.visualstudio.com/ 3. 安装插件 点击左边的“插件”按钮,安装…...

【转存】Go语言设计模式
导语| 设计模式是针对软件设计中常见问题的工具箱,其中的工具就是各种经过实践验证的解决方案。即使你从未遇到过这些问题,了解模式仍然非常有用,因为它能指导你如何使用面向对象的设计原则来解决各种问题,提高开发效率࿰…...

第十一章 升级与定制
第十一章 升级与定制 一、 RPM 包安装操作 RPM(Redhat Packet Manager)。 ①安装 rpm –i rpm 文件名 (注:⑴常见用法:-ivh 参数显示安装过程和 hash 符#; ⑵覆盖安装:使用- -force 选项。…...

代码随想录算法训练营第二十二天|235. 二叉搜索树的最近公共祖先、701.二叉搜索树中的插入操作、450.删除二叉搜索树中的节点
目录 235. 二叉搜索树的最近公共祖先 1、递归实现 2、迭代法实现 701.二叉搜索树中的插入操作(递归实现) 450.删除二叉搜索树中的节点(递归实现) 235. 二叉搜索树的最近公共祖先 相对于 二叉树的最近公共祖先 本题就简单一些了…...

hbase表出现RIT删除方案
1.删除zookeeper中对应表注册信息 cd /opt/cloudera/parcels/CDH/lib/zookeeper/bin ./zkCli.sh -server node2:2181 --node2为仿真节点,生产需改 deleteall /hbase/table/表名 2.删除hdfs对应表数据 hadoop dfs -rm -r /hbase/data/default/表名 3.删除hbase:met…...
)
SQL学习(3)
SELECT 语句用于从表中选取数据。 SELECT 列名称 FROM 表名称 SELECT * FROM 表名称关键词 DISTINCT 用于返回唯一不同的值 SELECT DISTINCT 列名称 FROM 表名称WHERE 子句用于规定选择的标准 如需有条件地从表中选取数据,可将 WHERE 子句添加到 SELECT 语句。 S…...

连接型CRM助力医疗企业把“成本中心”变成“利润中心”
在市场竞争日益加剧的情形下,企业获客成本大幅上涨,存量客户的维护和开发开始被重视,售后服务部门的职责在企业中发挥的价值越来越大。因为企业售后服务不仅能帮助客户解决问题的部门,还是客户与企业沟通的桥梁,将客户…...

《Vue.js 设计与实现》—— 03 Vue.js 3 的设计思路
1. 声明式地描述 UI Vue.js 3 是一个声明式的 UI 框架,即用户在使用 Vue.js 3 开发页面时是声明式地描述 UI 的。 编写前端页面涉及的内容如下: DOM 元素:例如是 div 标签还是 a 标签属性:如 a 标签的 href 属性,再…...

2023年湖北省建设厅特种作业操作证报名条件是什么?
建筑施工特种作业人员是指在房屋建筑和市政工程施工活动中,从事可能对本人、他人及周围设备设施的安全造成重大危害作业的人员。建筑施工特种作业人员必须经建设主管部门考核合格,取得建筑施工特种作业人员操作资格证书(以下简称“资格证书”…...

Redis 进阶
🥲 🥸 🤌 🫀 🫁 🥷 🐻❄️🦤 🪶 🦭 🪲 🪳 🪰 🪱 🪴 🫐 🫒 🫑…...

伙伴匹配系统笔记---02
Java 8特性 1. stream / parallelStream 流失处理 2. Optional 可选类 一. 前端整合路由 1. 路由:vue 路由组件库地址:安装 | Vue Router (vuejs.org) 安装:yarn add vue-router@4 2. 整合路由: // 1. 定义路由组件. // 也可以从其他文件导入 const Home = { templ…...

[2025CVPR]DeepVideo-R1:基于难度感知回归GRPO的视频强化微调框架详解
突破视频大语言模型推理瓶颈,在多个视频基准上实现SOTA性能 一、核心问题与创新亮点 1.1 GRPO在视频任务中的两大挑战 安全措施依赖问题 GRPO使用min和clip函数限制策略更新幅度,导致: 梯度抑制:当新旧策略差异过大时梯度消失收敛困难:策略无法充分优化# 传统GRPO的梯…...

FFmpeg 低延迟同屏方案
引言 在实时互动需求激增的当下,无论是在线教育中的师生同屏演示、远程办公的屏幕共享协作,还是游戏直播的画面实时传输,低延迟同屏已成为保障用户体验的核心指标。FFmpeg 作为一款功能强大的多媒体框架,凭借其灵活的编解码、数据…...
)
【服务器压力测试】本地PC电脑作为服务器运行时出现卡顿和资源紧张(Windows/Linux)
要让本地PC电脑作为服务器运行时出现卡顿和资源紧张的情况,可以通过以下几种方式模拟或触发: 1. 增加CPU负载 运行大量计算密集型任务,例如: 使用多线程循环执行复杂计算(如数学运算、加密解密等)。运行图…...

拉力测试cuda pytorch 把 4070显卡拉满
import torch import timedef stress_test_gpu(matrix_size16384, duration300):"""对GPU进行压力测试,通过持续的矩阵乘法来最大化GPU利用率参数:matrix_size: 矩阵维度大小,增大可提高计算复杂度duration: 测试持续时间(秒&…...
多模态大语言模型arxiv论文略读(108)
CROME: Cross-Modal Adapters for Efficient Multimodal LLM ➡️ 论文标题:CROME: Cross-Modal Adapters for Efficient Multimodal LLM ➡️ 论文作者:Sayna Ebrahimi, Sercan O. Arik, Tejas Nama, Tomas Pfister ➡️ 研究机构: Google Cloud AI Re…...

C#中的CLR属性、依赖属性与附加属性
CLR属性的主要特征 封装性: 隐藏字段的实现细节 提供对字段的受控访问 访问控制: 可单独设置get/set访问器的可见性 可创建只读或只写属性 计算属性: 可以在getter中执行计算逻辑 不需要直接对应一个字段 验证逻辑: 可以…...
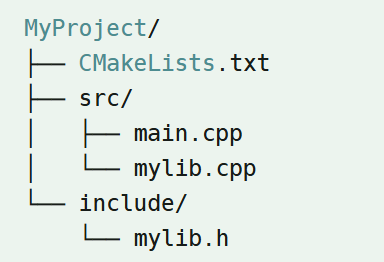
认识CMake并使用CMake构建自己的第一个项目
1.CMake的作用和优势 跨平台支持:CMake支持多种操作系统和编译器,使用同一份构建配置可以在不同的环境中使用 简化配置:通过CMakeLists.txt文件,用户可以定义项目结构、依赖项、编译选项等,无需手动编写复杂的构建脚本…...

Modbus RTU与Modbus TCP详解指南
目录 1. Modbus协议基础 1.1 什么是Modbus? 1.2 Modbus协议历史 1.3 Modbus协议族 1.4 Modbus通信模型 🎭 主从架构 🔄 请求响应模式 2. Modbus RTU详解 2.1 RTU是什么? 2.2 RTU物理层 🔌 连接方式 ⚡ 通信参数 2.3 RTU数据帧格式 📦 帧结构详解 🔍…...

数据结构:递归的种类(Types of Recursion)
目录 尾递归(Tail Recursion) 什么是 Loop(循环)? 复杂度分析 头递归(Head Recursion) 树形递归(Tree Recursion) 线性递归(Linear Recursion)…...

Neko虚拟浏览器远程协作方案:Docker+内网穿透技术部署实践
前言:本文将向开发者介绍一款创新性协作工具——Neko虚拟浏览器。在数字化协作场景中,跨地域的团队常需面对实时共享屏幕、协同编辑文档等需求。通过本指南,你将掌握在Ubuntu系统中使用容器化技术部署该工具的具体方案,并结合内网…...