车道线检测-Eigenlanes 论文学习笔记
论文:《Eigenlanes: Data-Driven Lane Descriptors for Structurally Diverse Lanes》
代码:https://github.com/dongkwonjin/Eigenlanes
核心:在 Eigenlane Space 中检测车道线
创新点
- Eigenlane:数据驱动的车道描述符,在特征车道空间中紧凑地表示结构多样化的车道;
- SIIC-Net:高效地检测和回归特征车道空间中的道路车道;
- SDLane数据集:比现有数据集更真实地表示真实驾驶环境中结构多样化和复杂的车道;
0、结构

1、Eigenlanes
用车道线在训练集中的分布来表示车道线。
- 车道线:x=[x1,x2,...,xN]T\pmb{x}=[x_1,x_2,...,x_N]^Tx=[x1,x2,...,xN]T (横坐标)
- 车道线矩阵:A=[x1,x2,...,xL]\pmb{A}=[\pmb{x}_1,\pmb{x}_2,...,\pmb{x}_L]A=[x1,x2,...,xL](训练集中的所有车道线)
- 使用 Frobenius 泛数 ∣∣A−AM∣∣F||\pmb{A}-\pmb{A}_M||_F∣∣A−AM∣∣F ,其在被最小化时,A\pmb{A}A 的最佳 MMM 阶逼近为:
AM=[x~1,x~2,...,x~L]=σ1u1v1T+⋯+σMuMvMT\pmb{A}_M=[\pmb{\tilde{x}}_1,\pmb{\tilde{x}}_2,...,\pmb{\tilde{x}}_L]=\sigma_1 \pmb{u}_1 \pmb{v}^T_1+\cdots+\sigma_M \pmb{u}_M \pmb{v}^T_MAM=[x~1,x~2,...,x~L]=σ1u1v1T+⋯+σMuMvMT
其中:- UM=[u1,...,uM]\pmb{U}_M=[\pmb{u}_1,...,\pmb{u}_M]UM=[u1,...,uM] 是 U=[u1,...,uN]\pmb{U}=[\pmb{u}_1,...,\pmb{u}_N]U=[u1,...,uN] 的前 M 个左奇异向量;
- VM=[v1,...,vM]\pmb{V}_M=[\pmb{v}_1,...,\pmb{v}_M]VM=[v1,...,vM] 是 V=[v1,...,vL]\pmb{V}=[\pmb{v}_1,...,\pmb{v}_L]V=[v1,...,vL] 的前 M 个右奇异向量;
- ΣM=[σ1,...,σM]\pmb{\Sigma}_M=[\pmb{\sigma}_1,...,\pmb{\sigma}_M]ΣM=[σ1,...,σM] 是 Σ\pmb{\Sigma}Σ 的前 M 个奇异值(Σ\pmb{\Sigma}Σ 中的奇异值经过了由大到小的排序,均大于0,且最小值为 σr\sigma_rσr,r 是 A 的秩);
- U\pmb{U}U、V\pmb{V}V 以及 Σ\pmb{\Sigma}Σ 是通过奇异值分解 A=UΣV\pmb{A}=\pmb{U}\pmb{\Sigma}\pmb{V}A=UΣV 得到的。
- 由此可知:
- x~i=UMci=[u1,...,uM]ci\tilde{x}_i=\pmb{U}_M \pmb{c}_i=[\pmb{u}_1,...,\pmb{u}_M]\pmb{c}_ix~i=UMci=[u1,...,uM]ci
- 定义 Eigenlanes:u1,...,uM\pmb{u}_1,...,\pmb{u}_Mu1,...,uM
- 定义 Eigenlanes 空间:由 {u1,...,uM}\{\pmb{u}_1,...,\pmb{u}_M\}{u1,...,uM} 张成的空间
- 给定车道线 x\pmb{x}x,将其映射到 Eigenlanes 空间:x~=UMc\tilde{\pmb{x}}=\pmb{U}_M \pmb{c}x~=UMc,其中 c=UMTx\pmb{c}=\pmb{U}_M^T \pmb{x}c=UMTx
在 Eigenlanes 空间生成候选车道线
在低维空间进行聚类,效果更佳。

Algorithm 1 Lane candidate generation in eigenlane space
Input: Set of training lanes {x1,x2,...,xL}\{x_1,x_2,...,x_L\}{x1,x2,...,xL}, M=#M=\#M=# of eigenlanes, K=#K=\#K=# of lane candidates
- Construct the lane matrix A and perform SVD in A=UΣV\pmb{A}=\pmb{U}\pmb{\Sigma}\pmb{V}A=UΣV;
- Transform each lane xix_ixi to cic_ici via c=UMTx\pmb{c}=\pmb{U}_M^T \pmb{x}c=UMTx;
- Apply the K-means algorithm to {c1,c2,...,cL}\{c_1,c_2,...,c_L\}{c1,c2,...,cL} to obtain K centroids c1,c2,...,cKc^1,c^2,...,c^Kc1,c2,...,cK
- Generate the lane candidate lk=UMck\pmb{l}_k=\pmb{U}_M\pmb{c}^klk=UMck by inversely transforming each centroid ck\pmb{c}^kck
Output: Set of lane candidates {l1,...,lK}\{l_1,...,l_K\}{l1,...,lK}
在 Eigenlanes 空间上,(通过最近邻)检测到 l=UMc\pmb{l}=\pmb{U}_M\pmb{c}l=UMc 之后,再用一个回归器回归出 Δc\Delta \pmb{c}Δc,这样有:
l+Δl=UM(c+Δc)\pmb{l}+\Delta\pmb{l}=\pmb{U}_M(\pmb{c}+\Delta \pmb{c}) l+Δl=UM(c+Δc)


2、SIIC-Net
整体结构

Encoder:ResNet50
Decoder:Binary Segmentation Map
2.1、SI 模块(Self-lane Identification)
预测:车道线概率、位置偏移、最顶处点的高度
输入:Squeezed Feature Map XsX_sXs、候选车道线 lkl_klk
输出:P=σ(f1(Y)),H=σ(f2(Y)),O=f3(Y)P=\sigma(f_1(Y)),\ H=\sigma(f_2(Y)),\ O=f_3(Y)P=σ(f1(Y)), H=σ(f2(Y)), O=f3(Y)
其中,Ys=[Ys1,Ys2,...,YsC2]∈RK×C2Y_s=[Y^1_s,Y^2_s,...,Y^{C_2}_s]\in \mathbb{R}^{K\times C_2}Ys=[Ys1,Ys2,...,YsC2]∈RK×C2 是沿着候选车道线 lk\pmb{l}_klk 做均值:
Ysc=1∣lk∣Σp∈lkXsc(p)Y_s^c=\frac{1}{|\pmb{l}_k|}\Sigma_{p\in \pmb{l}_k}X^c_s(p) Ysc=∣lk∣1Σp∈lkXsc(p)
fif_ifi 分别是 C2×2C_2\times 2C2×2、C2×RC_2\times RC2×R、C2×MC_2\times MC2×M 的全连接层。OkO_kOk 就是前面提到的偏移量 Δck\Delta c_kΔck
SI 模块之后,应用 NMS T 次,以选出 T 条有价值的车道线。
2.2、IC 模块(Inter-lane Correlation)
利用了车道线之间的 相关性:
- 相邻车道等间距
- 透视变换下,车道线交于 Vanishing Point
输入:Aggregated Feature Map XaX_aXa、候选车道线 lkl_klk、前段 NMS 输出的 T 条车道线;
输出:相应两条车道线对的匹配度 R=ϕ1(Ya)×ϕ2(Ya)TR=\phi_1(Y_a)\times\phi_2(Y_a)^TR=ϕ1(Ya)×ϕ2(Ya)T
其中,
- YaY_aYa 使用 XaX_aXa 计算得到,计算方式与 YsY_sYs 类似,它是 T×C1T\times C_1T×C1 的矩阵
- RRR 是 T×TT\times TT×T 的矩阵,Rij∈[−1,1]R_{ij}\in [-1,1]Rij∈[−1,1]
- ϕ1\phi_1ϕ1 与 ϕ2\phi_2ϕ2 是用卷积与 l2l_2l2 泛数实现的特征变换。
2.3、MWCS 模块
这是一种图优化技术,可见论文:《Harmonious Semantic Line Detection via Maximal Weight Clique Selection》
主要有两步操作:
- 寻找可以修正的最佳车道线 clique;
- 通过删除 y 坐标比 HviH_{v_i}Hvi 大的点,修正了每条车道线的高度;(后面不再赘述)
寻找可以修正的最佳车道线 clique
构建完全图
- G=(V,E)G=(\mathcal{V},\mathcal{E})G=(V,E)
- V={v1,v2,...,vT}\mathcal{V}=\{v_1,v_2,...,v_T\}V={v1,v2,...,vT} 是 NMS 输出的车道线
- E={(vi,vj):i≠j}\mathcal{E}=\{(v_i,v_j):i\ne j\}E={(vi,vj):i=j},每条边上有个权重 w(vi,vj)=12(Rij+Rji)w(v_i,v_j)=\frac{1}{2}(R_{ij}+R_{ji})w(vi,vj)=21(Rij+Rji)
定义匹配度
- 记 θ\thetaθ 为车道线 clique,由图节点的序号构成;
- θ\thetaθ 上的匹配度 Ecompatible(θ)E_{compatible}(\theta)Ecompatible(θ):
Ecompatible(θ)=Σi∈θΣj∈θ,j>iw(vi,vj)E_{compatible}(\theta)=\Sigma_{i\in\theta}\Sigma_{j\in\theta,j>i}w(v_i,v_j) Ecompatible(θ)=Σi∈θΣj∈θ,j>iw(vi,vj)
选 clique θ∗\theta^*θ∗
θ∗=argmaxθEcompatible(θ)\theta^*=\arg\max_\theta E_{compatible}(\theta) θ∗=argθmaxEcompatible(θ)
其中,限定 w(vi,vj)>κw(v_i,v_j)>\kappaw(vi,vj)>κ。
如果没有满足约束的 clique,则选择最大的单节点 clique:θ∗={i∗}\theta^*=\{i^*\}θ∗={i∗},其中 i∗=argmaxiPvii^*=\arg\max_i P_{v_i}i∗=argmaxiPvi
调整候选车道线
使用 U(cvi+Δcvi)\pmb{U}(\pmb{c_{v_i}}+\Delta\pmb{c_{v_i}})U(cvi+Δcvi) 调整 θ∗\theta^*θ∗ 中的车道线,其中 Δcvi\Delta\pmb{c_{v_i}}Δcvi 是 SI 模块的输出。
相关文章:
车道线检测-Eigenlanes 论文学习笔记
论文:《Eigenlanes: Data-Driven Lane Descriptors for Structurally Diverse Lanes》 代码:https://github.com/dongkwonjin/Eigenlanes 核心:在 Eigenlane Space 中检测车道线 创新点 Eigenlane:数据驱动的车道描述符ÿ…...

docker run mysql -e 的环境变量 Environment Variables
例子 sudo docker run -itd --name DockerMysqlLatest3307 -p 3307:3306 -e MYSQL_ROOT_PASSWORDroot的密码 mysql:latest### root无密码 sudo docker run -itd --name Mysql57 -p 57:3306 -e MYSQL_ALLOW_EMPTY_PASSWORDroot mysql:5.7https://hub.docker.com/_/mysql?tabde…...

第17章 MongoDB 条件操作符教程
第17章 MongoDB 条件操作符教程 描述 条件操作符用于比较两个表达式并从mongoDB集合中获取数据。 在本章节中,咱们将讨论如何在MongoDB中使用条件操作符。 MongoDB中条件操作符有: (>) 大于 - $gt(<) 小于 - $lt(>) 大于等于 - $gte(< …...
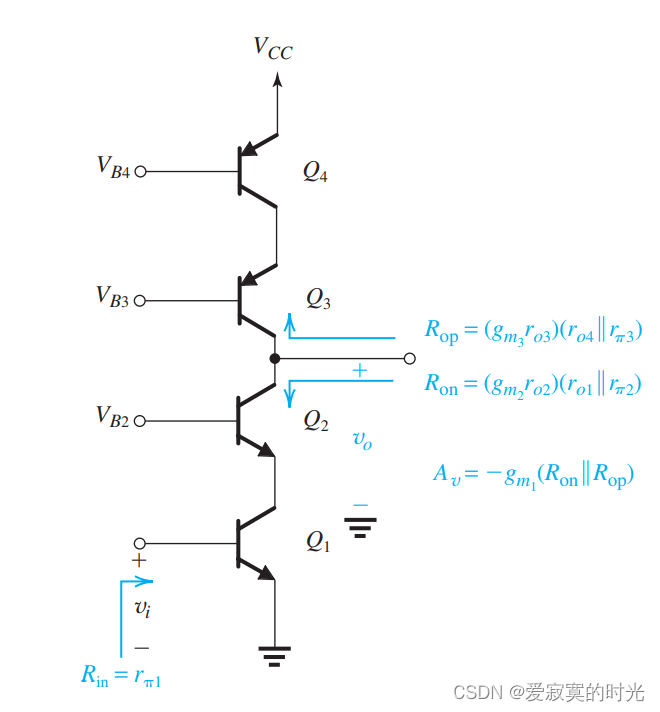
电子技术——共源共栅放大器
电子技术——共源共栅放大器 之前我们提到过,提高基础增益单元(共源放大器)的一种方法是提高其 ror_oro 的阻值,之后我们学过共栅放大器作为电流缓冲器可以做到这一点,自然地我们就得到了终极解决方案,也…...
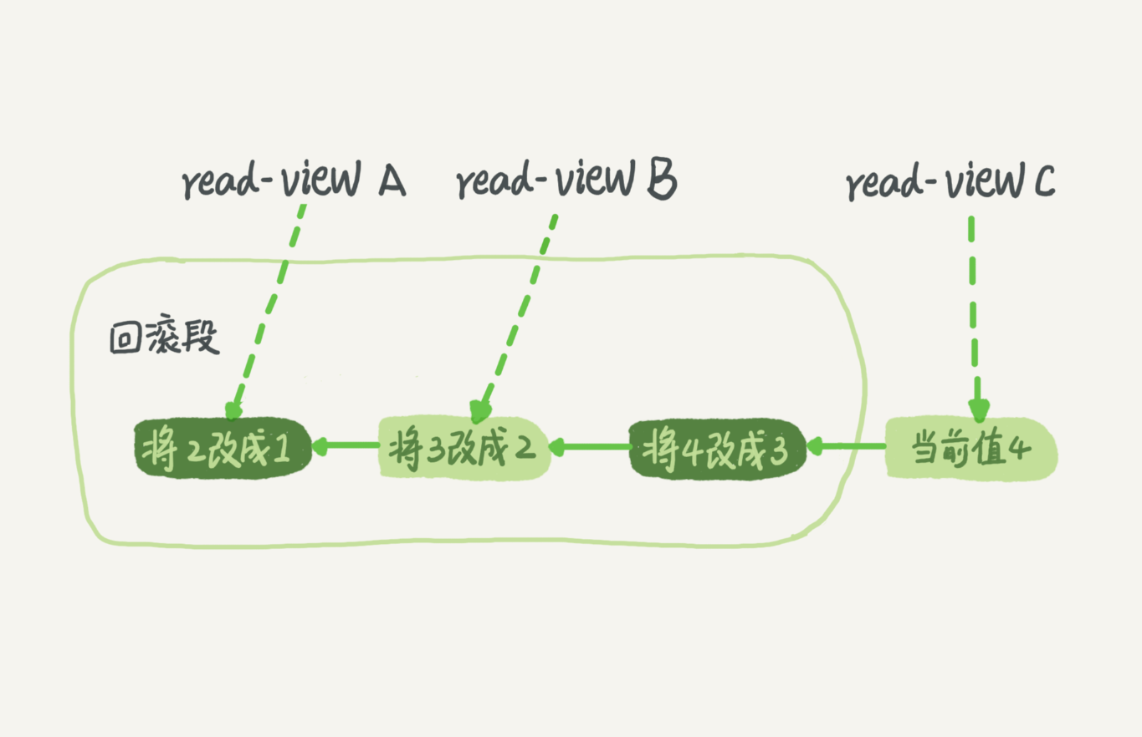
《MySQL学习》 事务隔离 与 MVCC
《MySQL学习》 事务隔离 一.事务的概念 事务保证一组数据要么全部成功要么全部失败,MySQL的事务基于引擎(如InnoDB)实现。 二.事务的隔离性与隔离级别 MySQL的标准隔离级别: 读未提交 : 一个事务还没提交时&#…...
html(二)基础标签
一 HTML中的注释 重点: 在哪写注释? 注释的形式? vs code和webstorm都可以通过 ctrl / 进行单行注释和取消注释 ① html中注释的形式 1) html文档中单行和多行注释是"<!-- -->" -->html2) 在html文档中,script标签…...
leetcode刷题---递归思想
leetcode刷题---递归思想)1.1 递归介绍1.2 基本步骤1.3 代表题目1.3.1 入门题---青蛙跳1.3.2.1 初级题226.翻转二叉树112.路径总和1.3.3 中级题---汉诺塔问题1.3.4 进阶题---细胞分裂1.1 递归介绍 如果在函数中存在着调用函数本身的情况,这种现象就叫递…...
ThreadLocal 源码级别详解
ThreadLocal简介 稍微翻译一下: ThreadLocal提供线程局部变量。这些变量与正常的变量不同,因为每一个线程在访问ThreadLocal实例的时候(通过其get或set方法)都有自己的、独立初始化的变量副本。ThreadLocal实例通常是类中的私有静…...
训练营day17
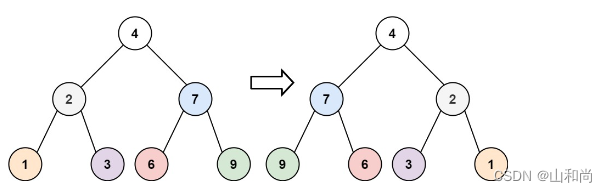
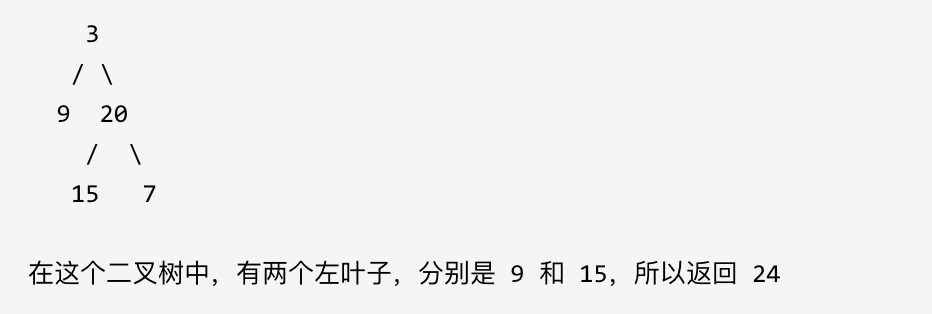
110.平衡二叉树 力扣题目链接 给定一个二叉树,判断它是否是高度平衡的二叉树。 本题中,一棵高度平衡二叉树定义为:一个二叉树每个节点 的左右两个子树的高度差的绝对值不超过1。 示例 1: 给定二叉树 [3,9,20,null,null,15,7] 返回 true 。 示…...
Nodejs原型链污染
Nodejs与JavaScript和JSON 有一些人在学习JavaScript时会分不清Nodejs和JavaScript之间的区别,如果没有node,那么我们的JavaScript代码则由浏览器中的JavaScript解析器进行解析。几乎所有的浏览器都配备了JavaScript的解析功能(最出名的就是…...

【Vue3】element-plus中el-tree的递归处理赋值回显问题
目录一:先获取所有权限tree二:在获取所有该角色能有的权限tree三:递归处理勾选tree节点由于项目是从0-1开始构建的 rbac都需要重新构建对接 所以涉及到了权限管理和菜单管理 一级菜单包含多个二级菜单 若二级不全选,则一级显示 半…...
C语言---宏
专栏:C语言 个人主页:HaiFan. 专栏简介:本专栏主要更新一些C语言的基础知识,也会实现一些小游戏和通讯录,学时管理系统之类的,有兴趣的朋友可以关注一下。 #define预处理预定义符号define#define定义标识符…...

算法导论—路径算法总结
图算法 单源最短路径 Bellman-Ford算法: 顶点为V,边为E的图 对每条边松弛|V|-1次边权可以为负值若存在一个可以从源结点到达的权值为负值的环路,算法返回False时间复杂度:O(VE) 有向无环图单源最短路径 DAG-SHORTEST-PATHS …...
程序环境--翻译+执行
ANSI C标准下,有两种程序环境。 第1种是翻译环境,在这个环境中源代码被转换为可执行的机器指令。 翻译环境包括:预处理(预编译)编译汇编链接。四个步骤。 第2种是执行/运行环境,它用于实际执行代码。 链接…...

微信小程序内部那些事
微信小程序没有window、document,它更像是一个类似 Node.js 的宿主环境。因此在小程序内部不能使用 document.querySelector 这样的选择器,也不支持 XMLHttpRequest、location、localStorage 等浏览器 API,只能使用小程序自己提供的 API&…...

这是从零在独自开开发,将是副业赚钱最好的平台!
文章目录最重要的事情放前面1.前言2.简单介绍一下3.【独自开】介绍3.1 分层标准化平台架构3.2 集成第三方数字接口3.3 支持各个行业的系统定制开发4.如何在【独自开】赚钱获取收益?4.1 如何称为【独自开】开发者?最重要的事情放前面 通过平台的审核也可以得到相应的奖金&…...

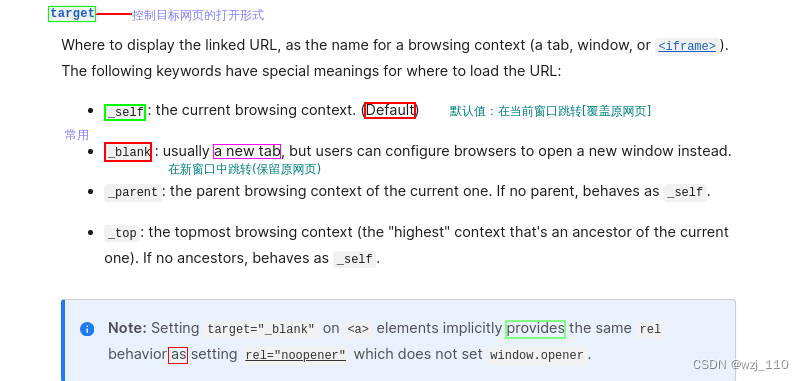
Spring MVC 之获取参数(对象、JSON格式数据、URL地址参数、文件、Cookie)
文章目录1. 获取单个参数2. 获取多个参数3. 获取对象4. 后端参数重命名 RequestParam5. 接收 JSON 格式的数据 RequestBody6. 从 URL 地址中获取参数 PathVariable7. 上传文件 RequestPart8. 获取Cookie (CookieValue)/Session/header8.1 获取 Request 和 Response 对象8.2 获取…...
永磁同步电机中BEMF电阻的作用
一、电路原理图 二、原理分析 如图一我们测的是相电压,从理论上我们知道我们测得相电压是一个马鞍波形,马鞍波形中并没有隐含 转子的位置和速度信息。那么为什么我们还要有这样一个电路呢? 这个问题其实困惑了我好久?直到有一天…...

JAVA练习45-二叉树的层序遍历
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 前言 提示:这里可以添加本文要记录的大概内容: 提示:以下是本篇文章正文内容,下面案例可供参考 一、题目二叉树的层序遍历 …...

超高精度PID调节器的特殊功能(3)——变送输出(转发)功能及其应用
摘要:变送输出是高级PID控制器的一项重要扩展功能,可用于多区控制、串级控制、比值控制和差值控制以及数据采集及记录。为展示变送输出功能的强大作用,本文主要针对超高精度VPC 2021系列PID控制器,介绍了变送输出的具体功能、参数…...

【收藏级】大模型学习路线图:从零基础到实战大神的全流程指南
当下大模型技术热潮席卷全球,无论是刚入门的编程小白,还是想转型AI领域的资深程序员,系统的学习路线都是避免走弯路的关键。本文整理了从基础铺垫到前沿进阶的完整大模型学习框架,清晰拆解每个阶段的核心目标、必学内容与优质资源…...

RetinaFace参数调优指南:如何设置阈值获得最佳检测效果?
RetinaFace参数调优指南:如何设置阈值获得最佳检测效果? 你是不是遇到过这样的情况:用RetinaFace检测人脸,要么漏掉了一些人,要么把背景里的东西也当成了人脸?这很可能是因为你用的那个默认的0.5阈值&…...

基于Prometheus的OLAP监控方案
基于Prometheus的OLAP监控方案 关键词 Prometheus、OLAP监控、时间序列数据、监控架构、指标分析 摘要 本方案聚焦于基于Prometheus的OLAP监控。先阐述了OLAP监控的背景和重要性,回顾了相关技术的发展历程。从第一性原理出发构建理论框架,分析其局限性与…...

自我介绍
我叫代禄用,20岁,就读于重庆电子科技职业大学,本科,专业是物联网工程技术,刚刚开始学习c语言,肯定是为了以后更好就业,能从事这个方面的工作,我打算不仅跟着学校的课程,还…...
)
跨域问题解释及前后端解决方案(SpringBoot)
一、问题引出 有时,控制台出现如下问题。二、为什么会有跨域 2.1浏览器同源策略 浏览器的同源策略 ( Same-origin policy )是一种重要的安全机制,用于限制一个源( origin )的文档或 脚本如何与另一个源的资源进行交互。…...

2026年3月份大更新来了!小黄鸭补帧3.2.2 AI插帧软件分享,小黄鸭补帧 小黄鸭使用教程losslessscaling使用教程!胎教级别!
哈喽 大家好 今天给大家分享一下,如何用这个小黄鸭软件,让我们的老显卡再战十年! 为什么叫它小黄鸭拼好针呢?因为它可以把游戏或者视频的帧数,通过补帧的方式变得非常高,让老显卡也能流畅跑起来,…...

gRPC协议在TOMs中的应用:跨平台服务通信的高性能实现
gRPC协议在TOMs中的应用:跨平台服务通信的高性能实现 【免费下载链接】TOMs TOMs is a fully open-source, high-performance, systematic, plugin-oriented, and scenario-agnostic general-purpose development framework. 项目地址: https://gitcode.com/gh_m…...

Apache OpenWhisk 终极指南:Kafka和Etcd如何驱动无服务器架构
Apache OpenWhisk 终极指南:Kafka和Etcd如何驱动无服务器架构 【免费下载链接】openwhisk Apache OpenWhisk is an open source serverless cloud platform 项目地址: https://gitcode.com/gh_mirrors/ope/openwhisk Apache OpenWhisk 是一个开源的无服务器云…...

3个关键配置技巧:优化RoundedImageView性能与质量的终极平衡指南
3个关键配置技巧:优化RoundedImageView性能与质量的终极平衡指南 【免费下载链接】RoundedImageView A fast ImageView that supports rounded corners, ovals, and circles. 项目地址: https://gitcode.com/gh_mirrors/ro/RoundedImageView RoundedImageVie…...

如何在Switch上畅玩经典暗黑破坏神:DevilutionX完美移植指南
如何在Switch上畅玩经典暗黑破坏神:DevilutionX完美移植指南 【免费下载链接】devilutionX Diablo build for modern operating systems 项目地址: https://gitcode.com/gh_mirrors/de/devilutionX DevilutionX是一款专为现代操作系统打造的暗黑破坏神&#…...