提取接近竖直物体(粗定位)
由于项目的需要提取图像之中的一个接近于竖直的物体,一般的方法是进行图像分割,分割方式使用什么OTSU方式以及hsv方法等等。但是项目中使用的相机是黑白相机,会受到一定的限制。因此想到的是使用线条提取方式。线条提取方式之中最好的方法是使用canny算法,但是这里不能够将接近竖直特征进行提取,因此,此处使用了Prewitt算子进行提取,但是只用这个算法,轮廓提取不出来,就结合了一下canny算子。下面是我的思路,感觉实现过程比较麻烦,但是居然实现了[苦笑]!!!!
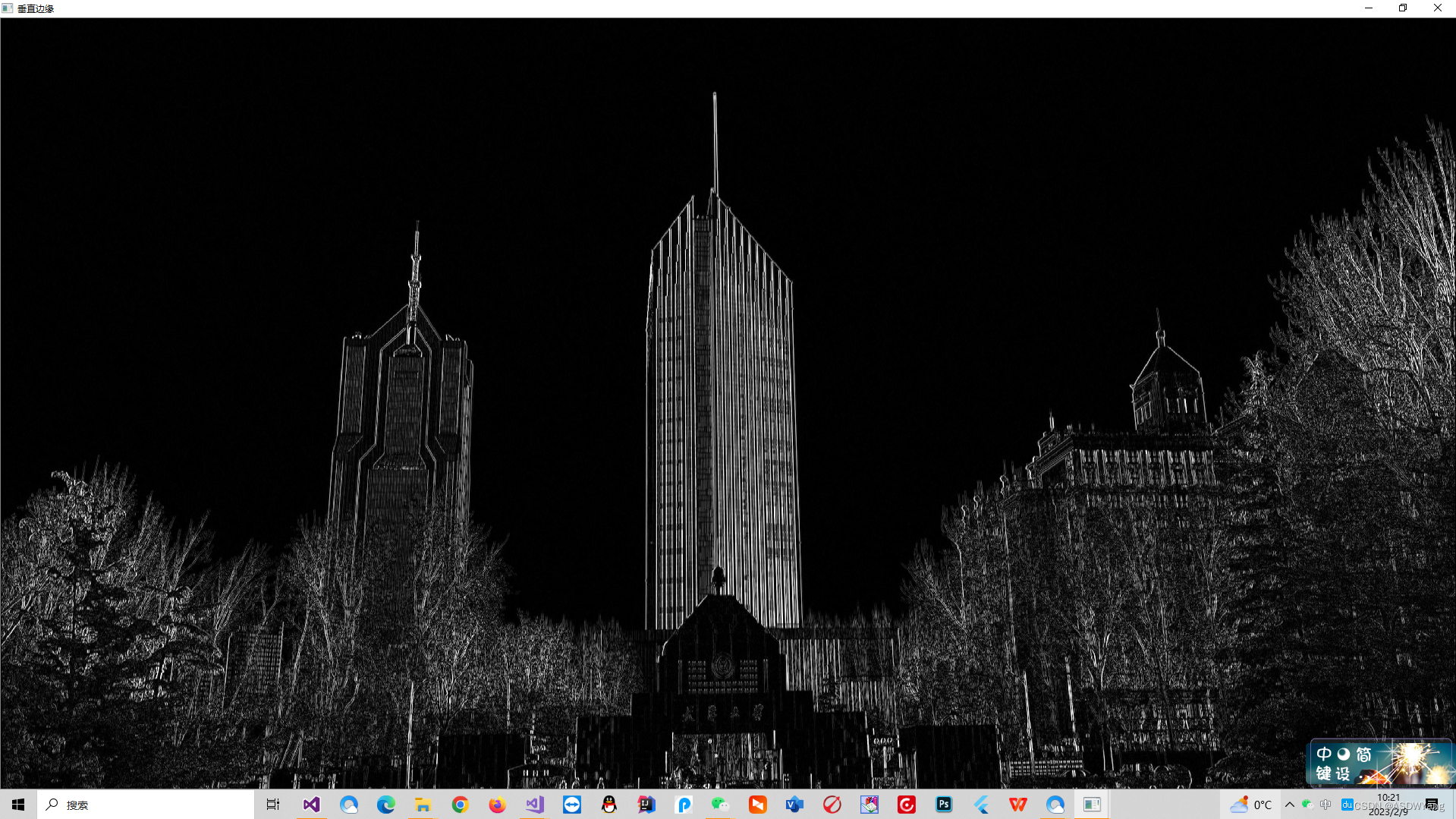
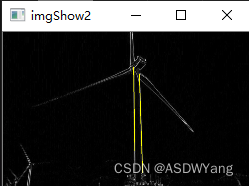
本次测试的案例是使用校门口的一个图片,图中存在很多的干扰,如下图所示

#include <opencv2/opencv.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <iostream>
#include <opencv2/core.hpp>
#include <opencv2/highgui.hpp>
#include <opencv2/imgproc.hpp>
using namespace cv;
using namespace std;void getPrewitt_oper(cv::Mat& getPrewitt_horizontal, cv::Mat& getPrewitt_vertical, cv::Mat& getPrewitt_Diagonal1, cv::Mat& getPrewitt_Diagonal2) {//水平方向getPrewitt_horizontal = (cv::Mat_<float>(3, 3) << -1, -1, -1, 0, 0, 0, 1, 1, 1);//垂直方向getPrewitt_vertical = (cv::Mat_<float>(3, 3) << -1, 0, 1, -1, 0, 1, -1, 0, 1);//对角135°getPrewitt_Diagonal1 = (cv::Mat_<float>(3, 3) << 0, 1, 1, -1, 0, 1, -1, -1, 0);//对角45°getPrewitt_Diagonal2 = (cv::Mat_<float>(3, 3) << -1, -1, 0, -1, 0, 1, 0, 1, 1);//逆时针反转180°得到卷积核cv::flip(getPrewitt_horizontal, getPrewitt_horizontal, -1);cv::flip(getPrewitt_vertical, getPrewitt_vertical, -1);cv::flip(getPrewitt_Diagonal1, getPrewitt_Diagonal1, -1);cv::flip(getPrewitt_Diagonal2, getPrewitt_Diagonal2, -1);
}void edge_Prewitt(cv::Mat& src, cv::Mat& dst1, cv::Mat& dst2, cv::Mat& dst3, cv::Mat& dst4, cv::Mat& dst, int ddepth, double delta = 0, int borderType = cv::BORDER_DEFAULT) {//获取Prewitt算子cv::Mat getPrewitt_horizontal;cv::Mat getPrewitt_vertical;cv::Mat getPrewitt_Diagonal1;cv::Mat getPrewitt_Diagonal2;getPrewitt_oper(getPrewitt_horizontal, getPrewitt_vertical, getPrewitt_Diagonal1, getPrewitt_Diagonal2);//卷积得到水平方向边缘cv::filter2D(src, dst1, ddepth, getPrewitt_horizontal, cv::Point(-1, -1), delta, borderType);//卷积得到4垂直方向边缘cv::filter2D(src, dst2, ddepth, getPrewitt_vertical, cv::Point(-1, -1), delta, borderType);//卷积得到45°方向边缘cv::filter2D(src, dst3, ddepth, getPrewitt_Diagonal1, cv::Point(-1, -1), delta, borderType);//卷积得到135°方向边缘cv::filter2D(src, dst4, ddepth, getPrewitt_Diagonal2, cv::Point(-1, -1), delta, borderType);//边缘强度(近似)cv::convertScaleAbs(dst1, dst1); //求绝对值并转为无符号8位图cv::convertScaleAbs(dst2, dst2);cv::convertScaleAbs(dst3, dst3); //求绝对值并转为无符号8位图cv::convertScaleAbs(dst4, dst4);dst = dst1 + dst2;}//数组从大到小排序
void reserve(int x[], int n) {int i, j, temp;for (i = 0; i < n - 1; i++) { //一共n个元素,则需要比较n-1次for (j = 0; j < n - 1 - i; j++) { //每一个元素需要比较的次数if (x[i] < x[i + j + 1]) {temp = x[i];x[i] = x[i + j + 1];x[i + j + 1] = temp;}}}
}int main()
{cv::Mat src = cv::imread("楼.jpg");if (src.empty()) {return -1;}cout << "??" << endl;if (src.channels() > 1) cv::cvtColor(src, src, CV_RGB2GRAY);cv::Mat dst, dst1, dst2, dst3, dst4, dst5;Mat src1 = cv::imread("楼.jpg");Mat src2 = cv::imread("楼.jpg");//medianBlur(src, src, 5); //均值滤波GaussianBlur(src, src, Size(5, 5), 0); //高斯滤波cout << "??" << endl;//注意:要采用CV_32F,因为有些地方卷积后为负数,若用8位无符号,则会导致这些地方为0edge_Prewitt(src, dst1, dst2, dst3, dst4, dst, CV_32F);cv::namedWindow("垂直边缘", CV_WINDOW_NORMAL);imshow("垂直边缘", dst2);cout << "??" << endl;//获取结构cv::Mat element1 = cv::getStructuringElement(cv::MORPH_RECT, cv::Size(3, 3));Mat out1;//进行形态学开运算操作 morphologyEx(dst2, out1, MORPH_OPEN, element1);//形态学开运算cv::namedWindow("xingtai", CV_WINDOW_NORMAL);imshow("xingtai", out1);//第二次进行形态学操作edge_Prewitt(dst2, dst1, out1, dst3, dst4, dst, CV_32F);cv::namedWindow("垂直边缘1", CV_WINDOW_NORMAL);imshow("垂直边缘1", out1);cout << "??" << endl;morphologyEx(out1, out1, MORPH_OPEN, element1);//形态学开运算cv::namedWindow("xingtai1", CV_WINDOW_NORMAL);imshow("xingtai1", out1);//获取结构cv::Mat element2 = cv::getStructuringElement(cv::MORPH_ELLIPSE, cv::Size(10, 10));Mat out2;//进行形态学闭运算操作 morphologyEx(out1, out2, MORPH_CLOSE, element2);//形态学开运算cv::namedWindow("xingtai2", CV_WINDOW_NORMAL);imshow("xingtai2", out2);imwrite("xingtai2.jpg", out2);/*//膨胀运算,将细小缝隙填补上,非必要Mat kernel = getStructuringElement(0, Size(3, 3));dilate(out2, dst2, kernel);cv::namedWindow("膨胀", CV_WINDOW_NORMAL);imshow("膨胀", dst2);*/cv::threshold(out2, dst2, 5, 255, cv::THRESH_BINARY);cv::namedWindow("二值化", CV_WINDOW_NORMAL);imshow("二值化", dst2);cv::threshold(dst2, dst2, 5, 255, cv::THRESH_BINARY_INV);cv::namedWindow("反二值化", CV_WINDOW_NORMAL);imshow("反二值化", dst2);//进行形态学闭运算操作 morphologyEx(dst2, out2, MORPH_CLOSE, element2);//形态学开运算cv::namedWindow("xingtai3", CV_WINDOW_NORMAL);imshow("xingtai3", out2);imwrite("xingtai3.jpg", out2);/*cv::threshold(dst2, dst2, 5, 255, cv::THRESH_BINARY);cv::namedWindow("反二值化", CV_WINDOW_NORMAL);imshow("反二值化", dst2);imwrite("反二值化.jpg", dst2);*//*//膨胀运算,将细小缝隙填补上,非必要Mat kernel = getStructuringElement(0, Size(5, 5));dilate(out2, out2, kernel);cv::namedWindow("膨胀1", CV_WINDOW_NORMAL);imshow("膨胀1", out2);*/Canny(out2, dst2, 5, 10);cv::namedWindow("Canny", CV_WINDOW_NORMAL);imshow("Canny", dst2);imwrite("Canny.jpg", dst2);vector<Vec4i> lines;HoughLinesP(dst2, lines, 1, CV_PI / 180, 50, 200, 30);int Length[100] = {0};//存放直线长度for (size_t i = 0; i < lines.size(); i++){Vec4i I = lines[i];double x1 = I[0];double y1 = I[1];double x2 = I[2];double y2 = I[3];//筛选满足条件的点if (abs(x1 - x2) + abs(y1 - y2) > 50){Length[i] = sqrt( (x1 - x2)*(x1 - x2) + (y1 - y2) * (y1 - y2));//将满足条件的点画出line(src1, Point2d(x1, y1), Point2d(x2, y2), Scalar(0, 255, 255), 2);cout << " " << "(" << x1 << "," << y1 << ")" << " " << "(" << x2 << "," << y2 << ")" << endl;//line(canny, Point2d(x1, y1), Point2d(x2, y2), Scalar(0, 255, 255), 2);}}Mat imgShow;imgShow = src1;resize(imgShow, imgShow, Size(imgShow.cols / 4, imgShow.rows / 4));imshow("imgShow", imgShow);imwrite("shuchu.png", src1);reserve(Length, 100);for (int i = 0; i < 100; i++) {cout << "长度"<<Length[i] << endl; //输出排序后的数组元素}for (size_t i = 0; i < lines.size(); i++){Vec4i I = lines[i];double x1 = I[0];double y1 = I[1];double x2 = I[2];double y2 = I[3];cout << "sdjk" << endl;cout << int(sqrt((x1 - x2)*(x1 - x2) + (y1 - y2) * (y1 - y2))) << endl;//筛选满足条件的点if ((int(sqrt((x1 - x2)*(x1 - x2) + (y1 - y2) * (y1 - y2))) == Length[0] ) || (int(sqrt((x1 - x2)*(x1 - x2) + (y1 - y2) * (y1 - y2))) == Length[1])){//将满足条件的点画出line(src2, Point2d(x1, y1), Point2d(x2, y2), Scalar(0, 255, 255), 2);cout << "djfkljsa " << "(" << x1 << "," << y1 << ")" << " " << "(" << x2 << "," << y2 << ")" << endl;//line(canny, Point2d(x1, y1), Point2d(x2, y2), Scalar(0, 255, 255), 2);}}imgShow = src2;resize(imgShow, imgShow, Size(imgShow.cols / 4, imgShow.rows / 4));imshow("imgShow2", imgShow);imwrite("shuchu2.png", src2);waitKey(0);return 0;
}调试过程:本次在进行调试过程之中进行了两次垂直检测迭代,进一步去排除水平线的干扰.使用形态学操作去除图片之中的空洞等等.
第一次进行垂直检测,注意这个地方只能够用特定的算子进行垂直检测,别的算子没有这个效果.
为了减少图片之中白色空洞的干扰,使用开操作.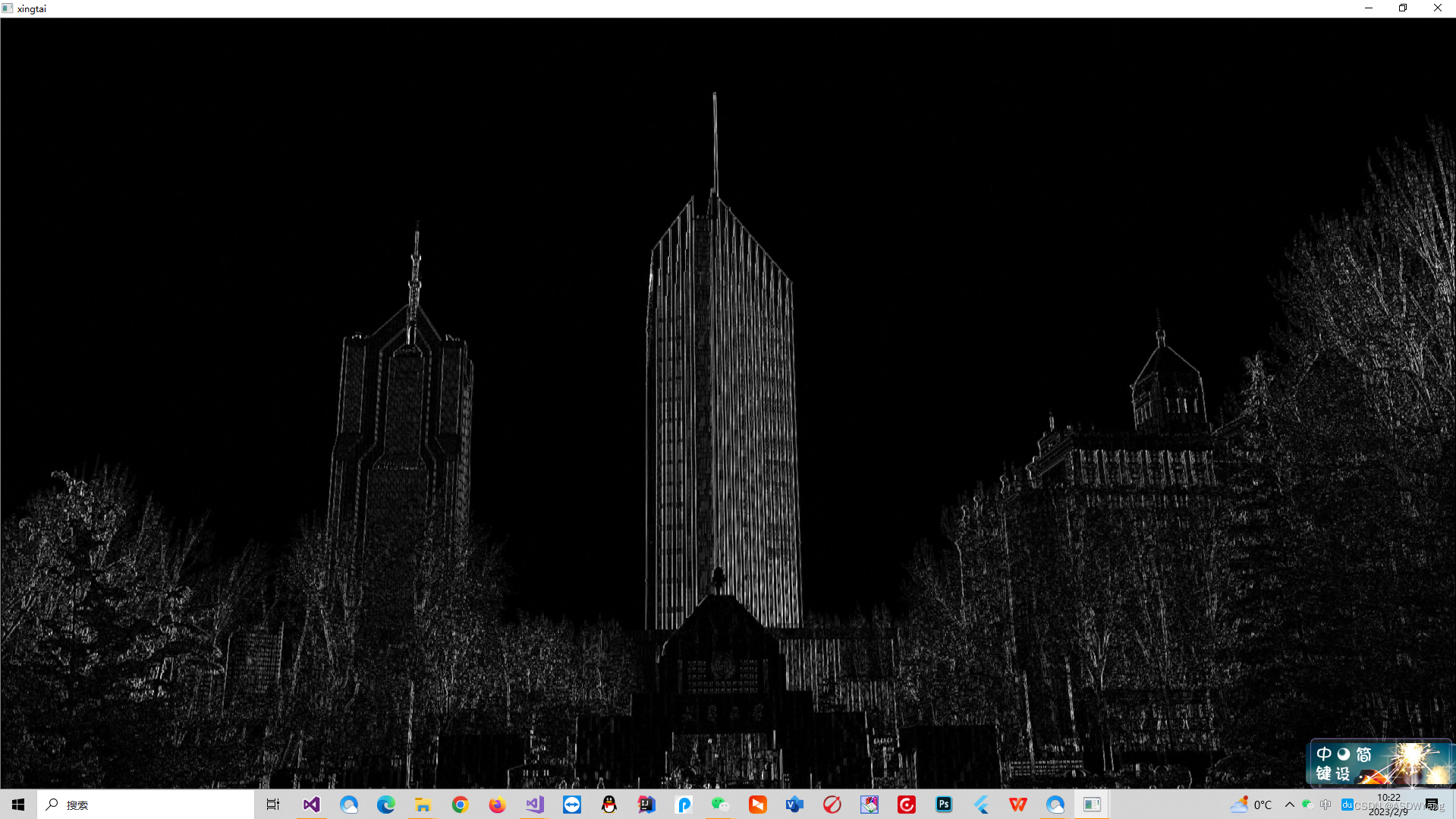
重复上述操作,进一步排除水平线的干扰.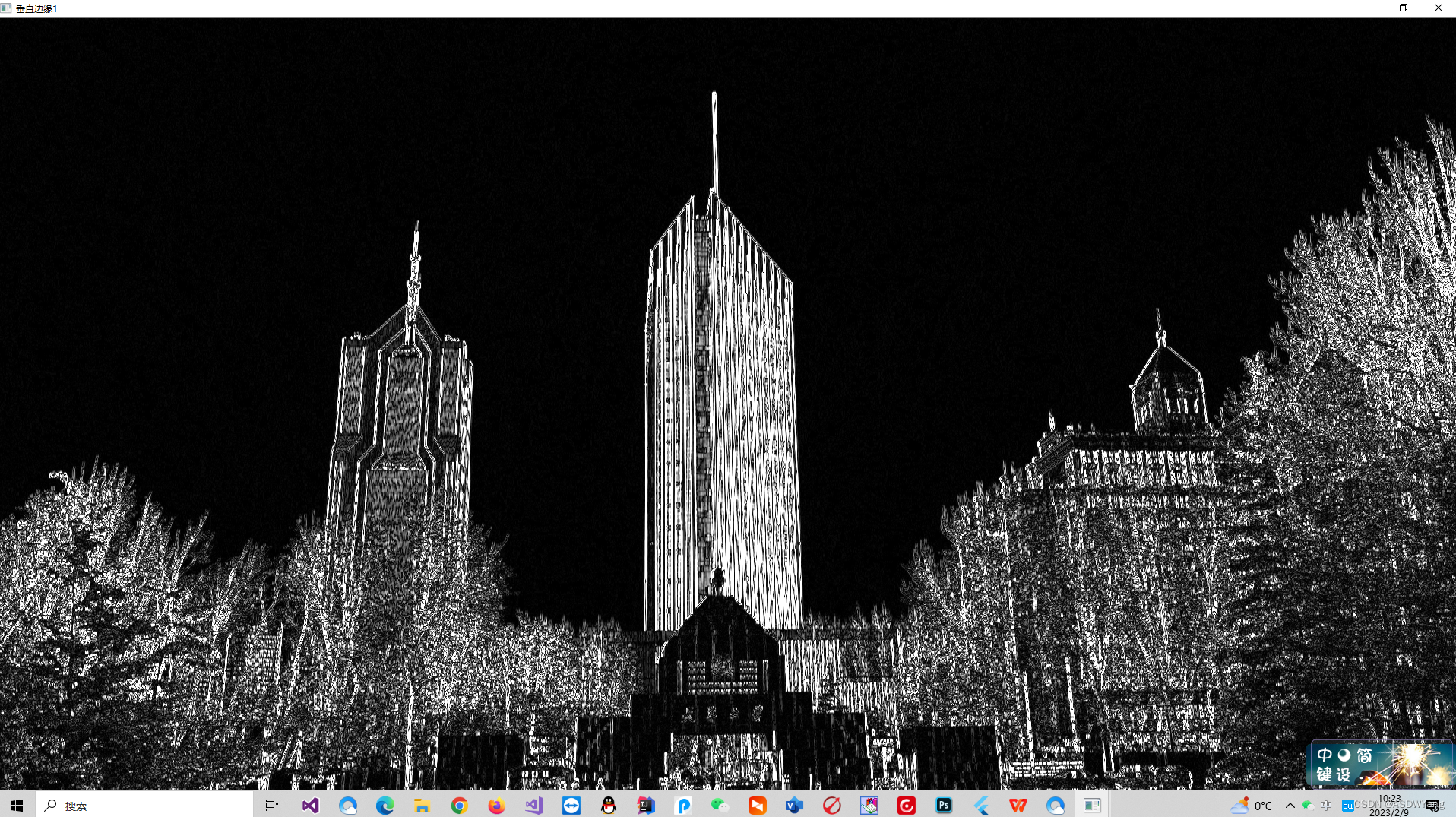
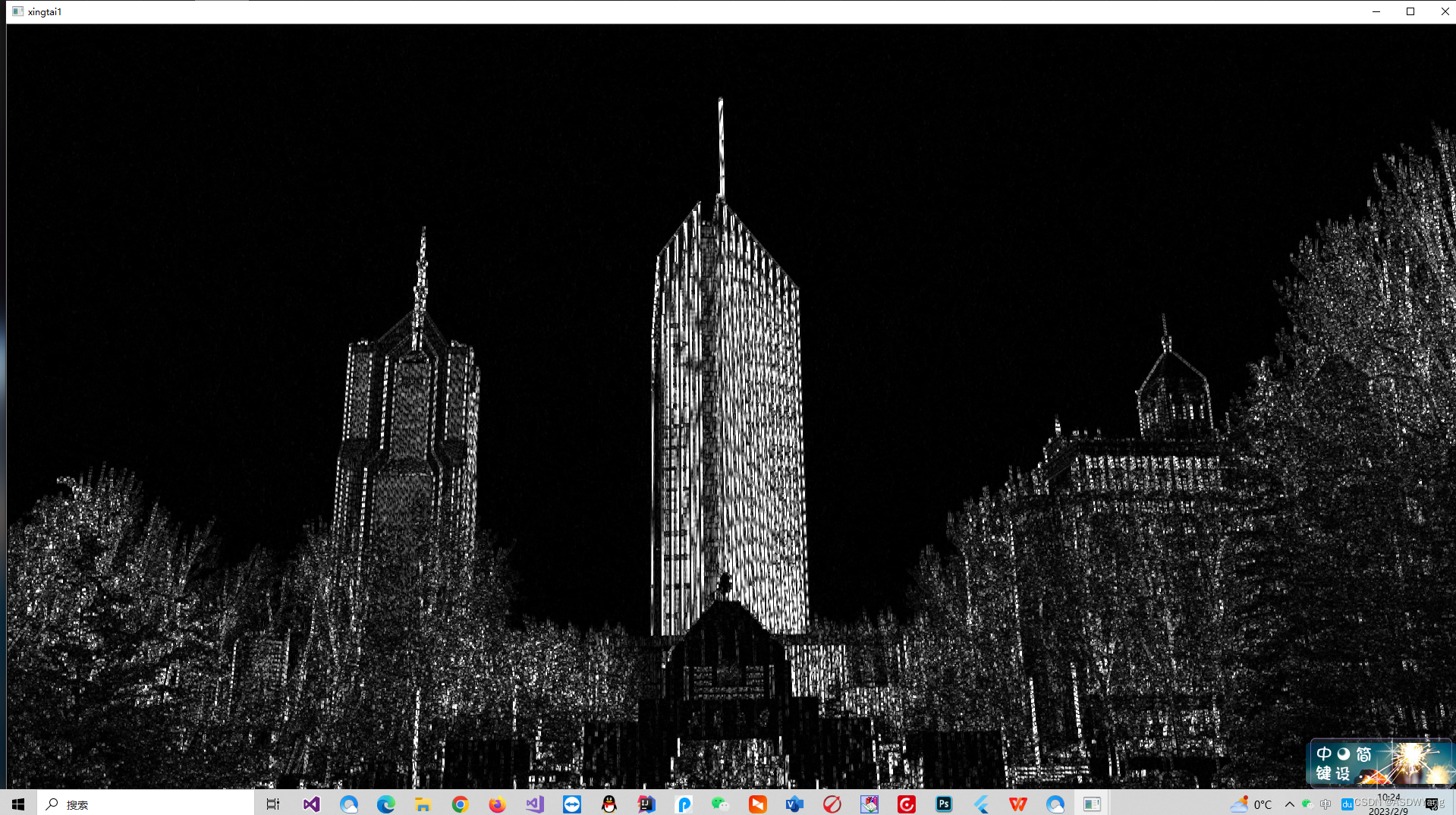
接下来是进行闭操作,将图中的白色线条尽可能连在一起,上图之中的楼左侧的线有一些断开了.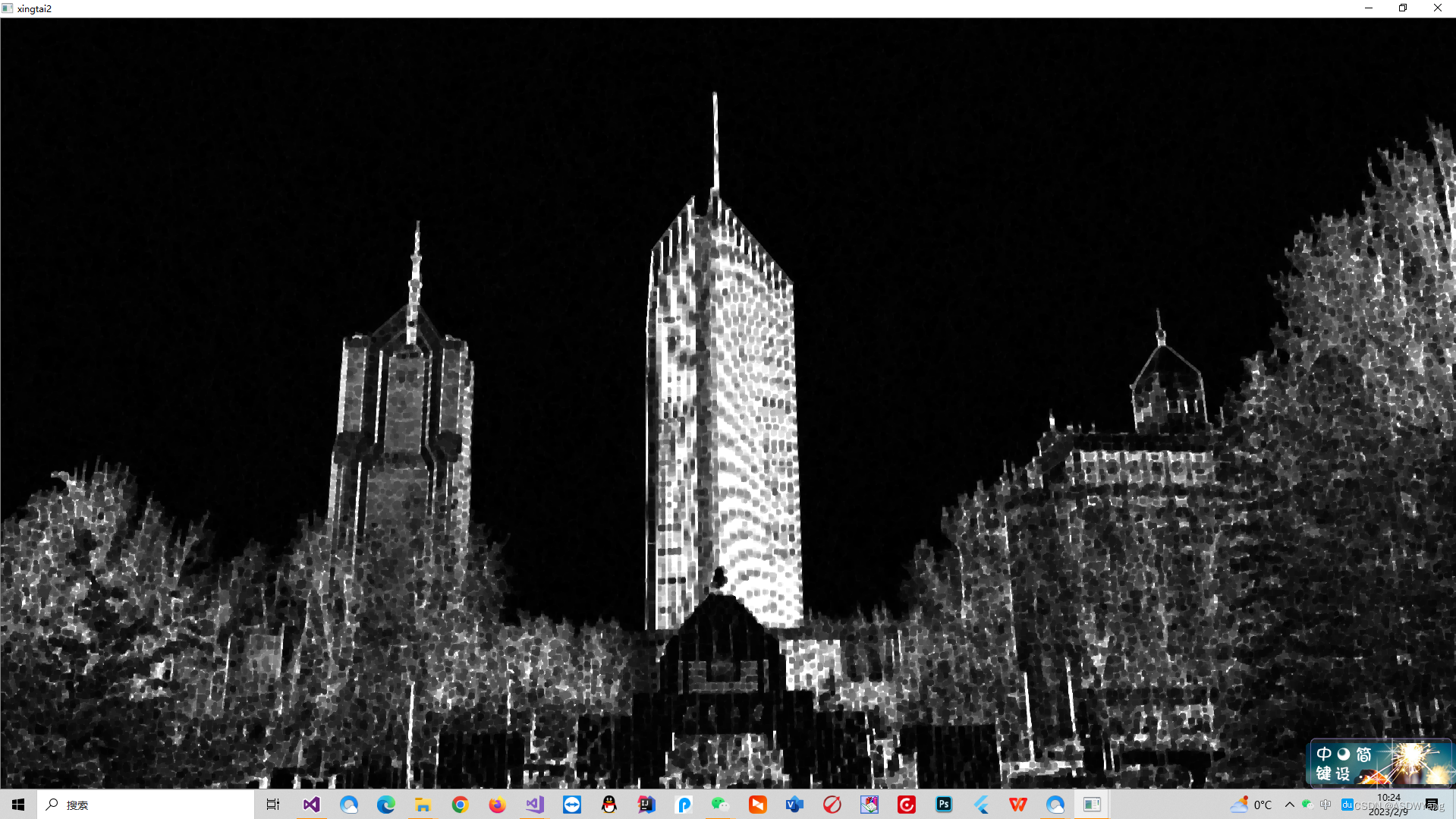
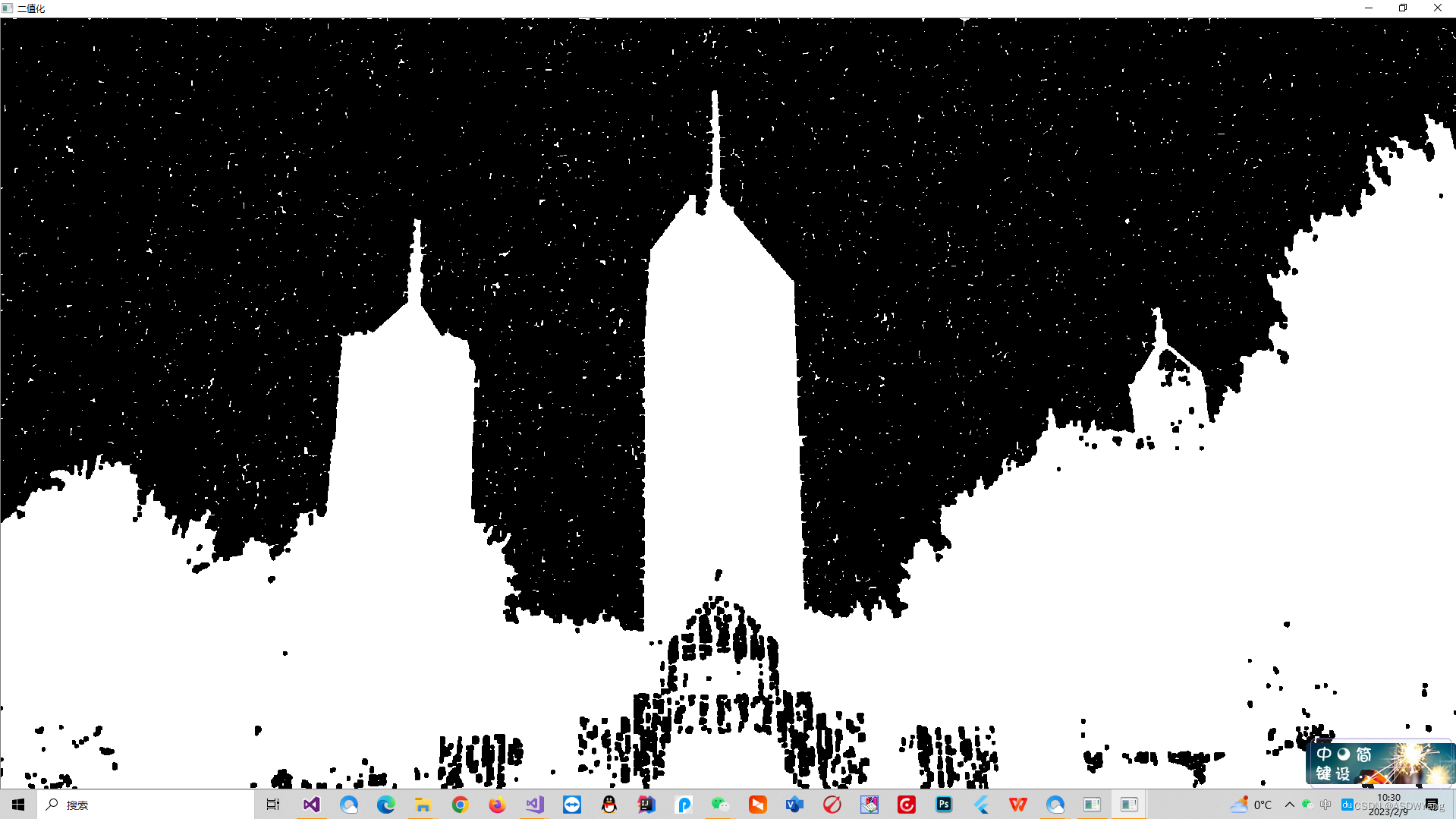
闭操作的缺陷是会产生小白点点.如下二值化过程
再进行一次反二值化,因为我不会用别的算子结合霍夫直线检测检测出来直线,只能转回去进行操作.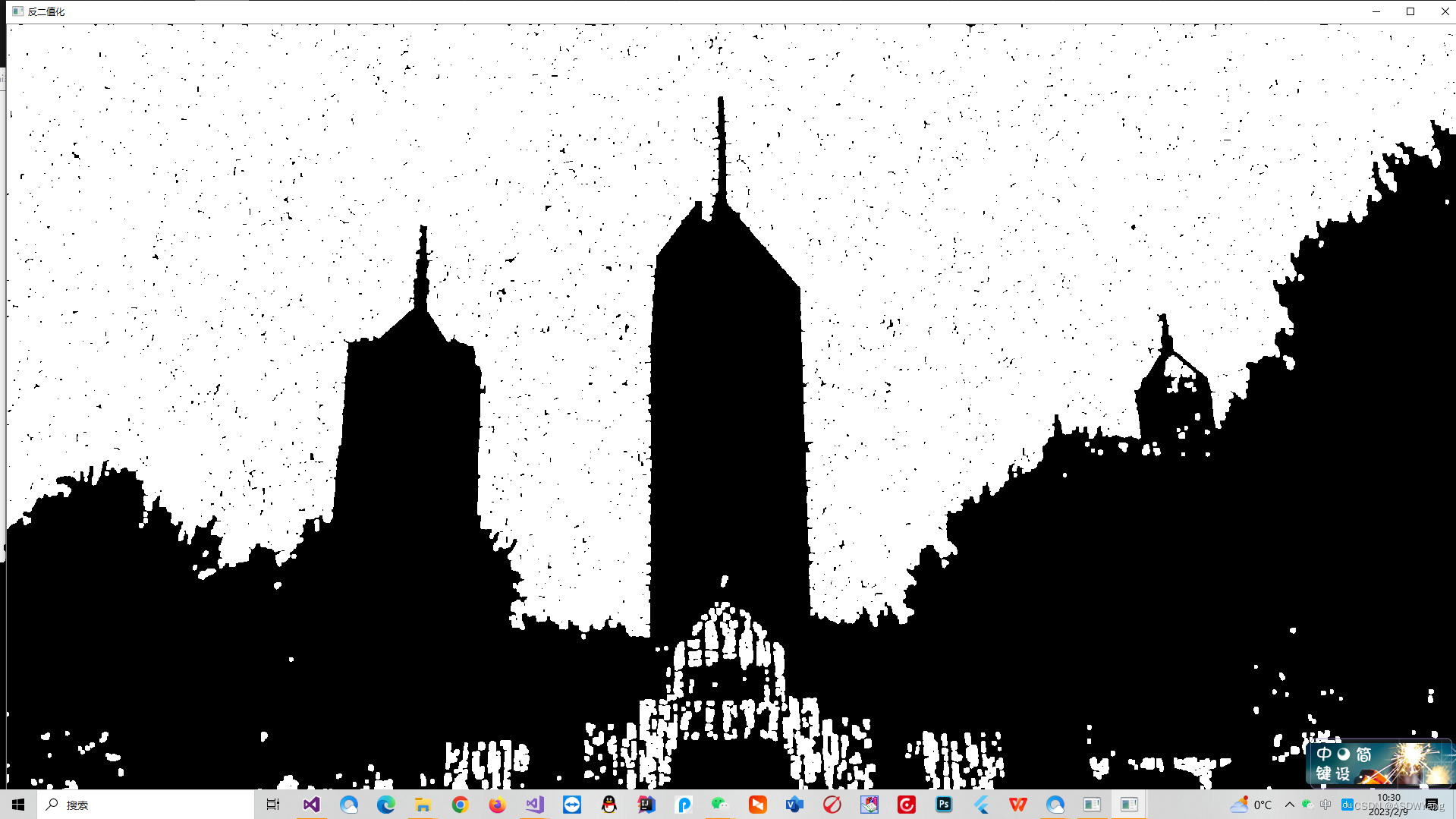
形态学操作,去除白点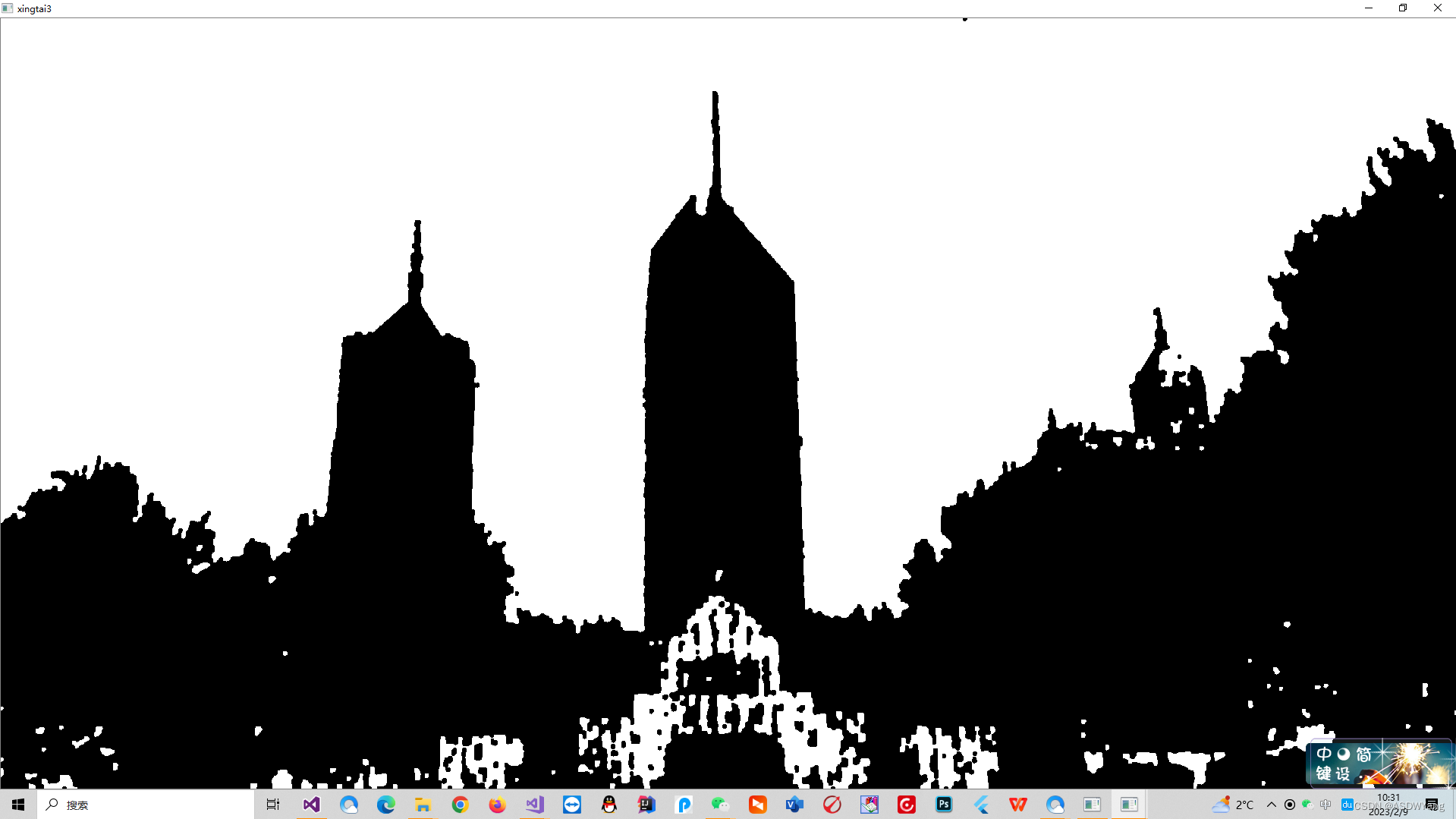
canny一下检测出来轮廓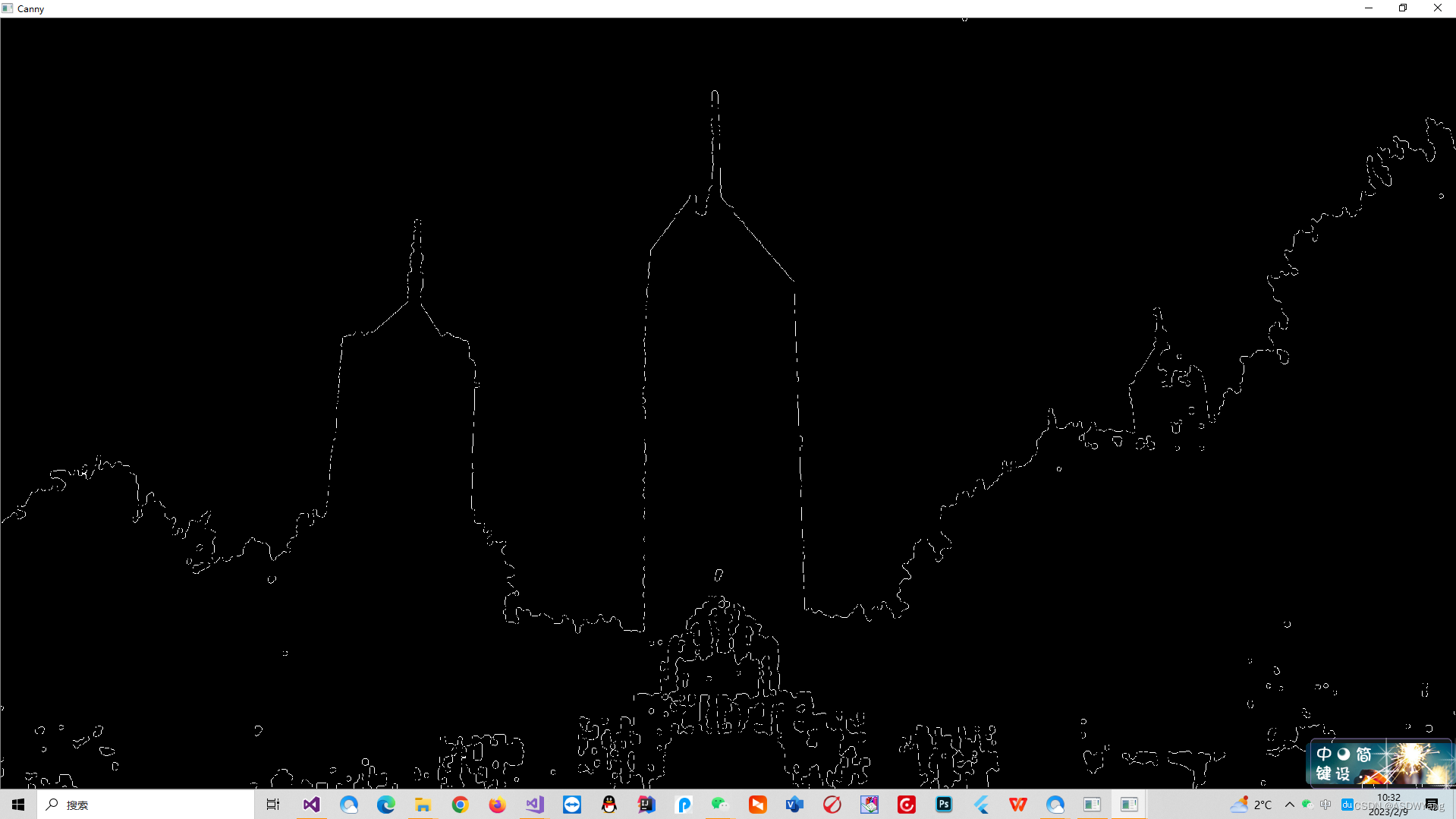
显示全部直线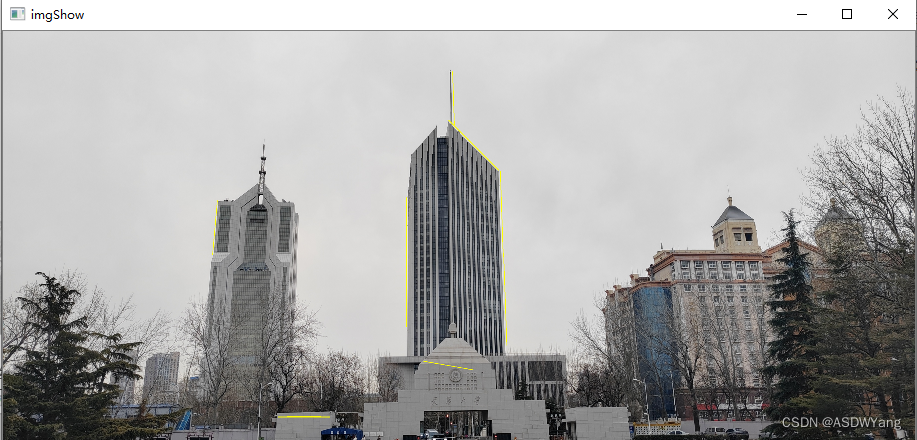
直线提取,我的方式是提取最长的两段直线。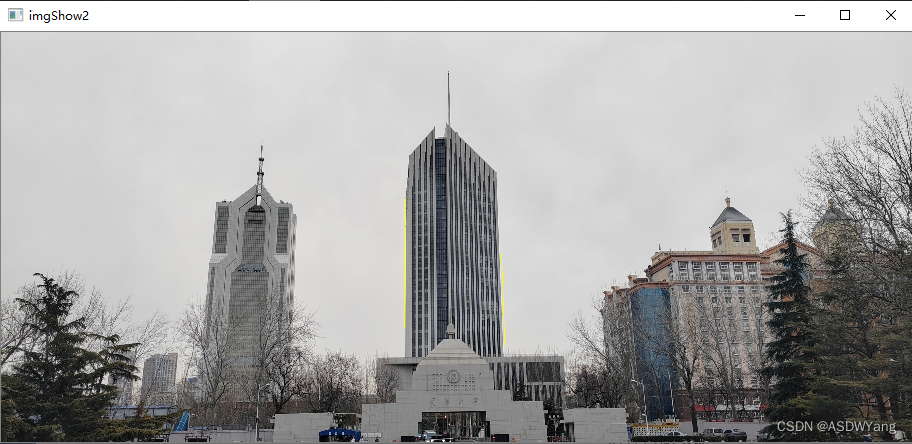
在上述操作完成之后,得到了物体的粗定位直线。
但是上面的算法还是存在相应的问题,换了一个别的图像可能就检测的不准。发现问题就是出在了二值化的过程。
为了修正上方的算法的失败,使用提取外部轮廓的方式进行求取,将代码改了改。
#include <opencv2/opencv.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <iostream>
#include <opencv2/core.hpp>
#include <opencv2/highgui.hpp>
#include <opencv2/imgproc.hpp>
using namespace cv;
using namespace std;void getPrewitt_oper(cv::Mat& getPrewitt_horizontal, cv::Mat& getPrewitt_vertical, cv::Mat& getPrewitt_Diagonal1, cv::Mat& getPrewitt_Diagonal2) {//水平方向getPrewitt_horizontal = (cv::Mat_<float>(3, 3) << -1, -1, -1, 0, 0, 0, 1, 1, 1);//垂直方向getPrewitt_vertical = (cv::Mat_<float>(3, 3) << -1, 0, 1, -1, 0, 1, -1, 0, 1);//对角135°getPrewitt_Diagonal1 = (cv::Mat_<float>(3, 3) << 0, 1, 1, -1, 0, 1, -1, -1, 0);//对角45°getPrewitt_Diagonal2 = (cv::Mat_<float>(3, 3) << -1, -1, 0, -1, 0, 1, 0, 1, 1);//逆时针反转180°得到卷积核cv::flip(getPrewitt_horizontal, getPrewitt_horizontal, -1);cv::flip(getPrewitt_vertical, getPrewitt_vertical, -1);cv::flip(getPrewitt_Diagonal1, getPrewitt_Diagonal1, -1);cv::flip(getPrewitt_Diagonal2, getPrewitt_Diagonal2, -1);
}void edge_Prewitt(cv::Mat& src, cv::Mat& dst1, cv::Mat& dst2, cv::Mat& dst3, cv::Mat& dst4, cv::Mat& dst, int ddepth, double delta = 0, int borderType = cv::BORDER_DEFAULT) {//获取Prewitt算子cv::Mat getPrewitt_horizontal;cv::Mat getPrewitt_vertical;cv::Mat getPrewitt_Diagonal1;cv::Mat getPrewitt_Diagonal2;getPrewitt_oper(getPrewitt_horizontal, getPrewitt_vertical, getPrewitt_Diagonal1, getPrewitt_Diagonal2);//卷积得到水平方向边缘cv::filter2D(src, dst1, ddepth, getPrewitt_horizontal, cv::Point(-1, -1), delta, borderType);//卷积得到4垂直方向边缘cv::filter2D(src, dst2, ddepth, getPrewitt_vertical, cv::Point(-1, -1), delta, borderType);//卷积得到45°方向边缘cv::filter2D(src, dst3, ddepth, getPrewitt_Diagonal1, cv::Point(-1, -1), delta, borderType);//卷积得到135°方向边缘cv::filter2D(src, dst4, ddepth, getPrewitt_Diagonal2, cv::Point(-1, -1), delta, borderType);//边缘强度(近似)cv::convertScaleAbs(dst1, dst1); //求绝对值并转为无符号8位图cv::convertScaleAbs(dst2, dst2);cv::convertScaleAbs(dst3, dst3); //求绝对值并转为无符号8位图cv::convertScaleAbs(dst4, dst4);dst = dst1 + dst2;}//数组从大到小排序
void reserve(int x[], int n) {int i, j, temp;for (i = 0; i < n - 1; i++) { //一共n个元素,则需要比较n-1次for (j = 0; j < n - 1 - i; j++) { //每一个元素需要比较的次数if (x[i] < x[i + j + 1]) {temp = x[i];x[i] = x[i + j + 1];x[i + j + 1] = temp;}}}
}int main()
{cv::Mat src = cv::imread("楼.jpg");if (src.empty()) {return -1;}cout << "??" << endl;if (src.channels() > 1) cv::cvtColor(src, src, CV_RGB2GRAY);cv::Mat dst, dst1, dst2, dst3, dst4, dst5;Mat src1 = cv::imread("楼.jpg");Mat src2 = cv::imread("楼.jpg");//medianBlur(src, src, 5); //均值滤波GaussianBlur(src, src, Size(5, 5), 0); //高斯滤波cout << "??" << endl;//注意:要采用CV_32F,因为有些地方卷积后为负数,若用8位无符号,则会导致这些地方为0edge_Prewitt(src, dst1, dst2, dst3, dst4, dst, CV_32F);cv::namedWindow("垂直边缘", CV_WINDOW_NORMAL);imshow("垂直边缘", dst2);cout << "??" << endl;/*Mat shdjk;cv::threshold(dst2, shdjk, 25, 255, cv::THRESH_BINARY);cv::namedWindow("二值化1212", CV_WINDOW_NORMAL);imshow("二值化1212", shdjk);*///获取结构cv::Mat element1 = cv::getStructuringElement(cv::MORPH_RECT, cv::Size(3, 3));Mat out1;//进行形态学开运算操作 morphologyEx(dst2, out1, MORPH_OPEN, element1);//形态学开运算cv::namedWindow("xingtai", CV_WINDOW_NORMAL);imshow("xingtai", out1);Mat out2;//第二次进行形态学操作edge_Prewitt(out1, dst1, out1, dst3, dst4, dst, CV_32F);cv::namedWindow("垂直边缘1", CV_WINDOW_NORMAL);imshow("垂直边缘1", out1);cout << "??" << endl;/*morphologyEx(out1, out1, MORPH_OPEN, element1);//形态学开运算cv::namedWindow("xingtai1", CV_WINDOW_NORMAL);imshow("xingtai1", out1);//获取结构cv::Mat element2 = cv::getStructuringElement(cv::MORPH_ELLIPSE, cv::Size(10, 10));//进行形态学闭运算操作 morphologyEx(out1, out2, MORPH_CLOSE, element2);//形态学闭合运算cv::namedWindow("xingtai2", CV_WINDOW_NORMAL);imshow("xingtai2", out2);imwrite("xingtai2.jpg", out2);waitKey(0);*/std::vector<std::vector<cv::Point>> contours;std::vector<cv::Vec4i> hierarchy;findContours(out1, contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_NONE);double maxArea = 0;int index = 0;vector<cv::Point> maxContour;for (size_t i = 0; i < contours.size(); i++){double area = cv::contourArea(contours[i]);if (area > maxArea){maxArea = area;maxContour = contours[i];index = i;}}drawContours(src1, contours, index, Scalar(255)); // 参数cv::namedWindow("test", CV_WINDOW_NORMAL);imshow("test", src1);waitKey(0);/*Mat shdjk;cv::threshold(out1, shdjk, 10, 255, cv::THRESH_BINARY);cv::namedWindow("二值化1212", CV_WINDOW_NORMAL);imshow("二值化1212", shdjk);std::vector<std::vector<cv::Point>> contours;std::vector<cv::Vec4i> hierarchy;cv::findContours(shdjk, contours, hierarchy, cv::RETR_EXTERNAL, cv::CHAIN_APPROX_NONE); //只找最外层轮廓std::vector<std::vector<cv::Point>> approxCurves(contours.size());for (int i = 0; i < contours.size(); ++i) { //绘制逼近后的轮廓double epsilon = 0.1 * cv::arcLength(contours[i], true);cv::approxPolyDP(contours[i], approxCurves[i], epsilon, true);cv::drawContours(src1, approxCurves, i, cv::Scalar(0, 255, 0), 2);}cv::namedWindow("success", CV_WINDOW_NORMAL);imshow("success", src1);cv::waitKey();*////*Mat dhfjua;cv::threshold(out2, dhfjua, 15, 255, cv::THRESH_BINARY);cv::namedWindow("二值化000", CV_WINDOW_NORMAL);imshow("二值化000", dhfjua);*//*//膨胀运算,将细小缝隙填补上,非必要Mat kernel = getStructuringElement(0, Size(3, 3));dilate(out2, dst2, kernel);cv::namedWindow("膨胀", CV_WINDOW_NORMAL);imshow("膨胀", dst2);*//*0cv::threshold(out2, dst2, 5, 255, cv::THRESH_BINARY);cv::namedWindow("二值化", CV_WINDOW_NORMAL);imshow("二值化", dst2);cv::threshold(dst2, dst2, 5, 255, cv::THRESH_BINARY_INV);cv::namedWindow("反二值化", CV_WINDOW_NORMAL);imshow("反二值化", dst2);*//*Mat out3;//进行形态学闭运算操作 morphologyEx(dst2, out3, MORPH_CLOSE, element2);//形态学开运算cv::namedWindow("xingtai3", CV_WINDOW_NORMAL);imshow("xingtai3", out3);imwrite("xingtai3.jpg", out3);*/waitKey(0);vector<Vec4i> lines;HoughLinesP(src1, lines, 1, CV_PI / 180, 100, 400, 30);int Length[1000] = { 0 };//存放直线长度for (size_t i = 0; i < lines.size(); i++){Vec4i I = lines[i];double x1 = I[0];double y1 = I[1];double x2 = I[2];double y2 = I[3];//筛选满足条件的点if (abs(x1 - x2) + abs(y1 - y2) > 50){Length[i] = sqrt((x1 - x2)*(x1 - x2) + (y1 - y2) * (y1 - y2));//将满足条件的点画出line(src1, Point2d(x1, y1), Point2d(x2, y2), Scalar(0, 255, 255), 2);cout << " " << "(" << x1 << "," << y1 << ")" << " " << "(" << x2 << "," << y2 << ")" << endl;//line(canny, Point2d(x1, y1), Point2d(x2, y2), Scalar(0, 255, 255), 2);}}Mat imgShow;imgShow = src1;resize(imgShow, imgShow, Size(imgShow.cols / 4, imgShow.rows / 4));imshow("imgShow", imgShow);imwrite("shuchu.png", src1);reserve(Length, 1000);for (int i = 0; i < 1000; i++) {cout << "长度" << Length[i] << endl; //输出排序后的数组元素}for (size_t i = 0; i < lines.size(); i++){Vec4i I = lines[i];double x1 = I[0];double y1 = I[1];double x2 = I[2];double y2 = I[3];cout << "sdjk" << endl;cout << int(sqrt((x1 - x2)*(x1 - x2) + (y1 - y2) * (y1 - y2))) << endl;//筛选满足条件的点if ((int(sqrt((x1 - x2)*(x1 - x2) + (y1 - y2) * (y1 - y2))) == Length[0]) || (int(sqrt((x1 - x2)*(x1 - x2) + (y1 - y2) * (y1 - y2))) == Length[1])){//将满足条件的点画出line(src2, Point2d(x1, y1), Point2d(x2, y2), Scalar(0, 255, 255), 2);cout << "djfkljsa " << "(" << x1 << "," << y1 << ")" << " " << "(" << x2 << "," << y2 << ")" << endl;//line(canny, Point2d(x1, y1), Point2d(x2, y2), Scalar(0, 255, 255), 2);}}imgShow = src2;resize(imgShow, imgShow, Size(imgShow.cols / 4, imgShow.rows / 4));imshow("imgShow2", imgShow);imwrite("shuchu2.png", src2);waitKey(0);return 0;
}效果还是不好,问题就是出在了相应的一个二值化的过程,因此,想到使用区域增长算法改进
#include <iostream>
#include <string>
#include <list>
#include <vector>
#include <map>
#include <stack>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>using namespace std;
using namespace cv;//------------------------------【两步法新改进版】----------------------------------------------
// 对二值图像进行连通区域标记,从1开始标号
void Two_PassNew(const Mat &bwImg, Mat &labImg)
{assert(bwImg.type() == CV_8UC1);labImg.create(bwImg.size(), CV_32SC1); //bwImg.convertTo( labImg, CV_32SC1 );labImg = Scalar(0);labImg.setTo(Scalar(1), bwImg);assert(labImg.isContinuous());const int Rows = bwImg.rows - 1, Cols = bwImg.cols - 1;int label = 1;vector<int> labelSet;labelSet.push_back(0);labelSet.push_back(1);//the first passint *data_prev = (int*)labImg.data; //0-th row : int* data_prev = labImg.ptr<int>(i-1);int *data_cur = (int*)(labImg.data + labImg.step); //1-st row : int* data_cur = labImg.ptr<int>(i);for (int i = 1; i < Rows; i++){data_cur++;data_prev++;for (int j = 1; j < Cols; j++, data_cur++, data_prev++){if (*data_cur != 1)continue;int left = *(data_cur - 1);int up = *data_prev;int neighborLabels[2];int cnt = 0;if (left > 1)neighborLabels[cnt++] = left;if (up > 1)neighborLabels[cnt++] = up;if (!cnt){labelSet.push_back(++label);labelSet[label] = label;*data_cur = label;continue;}int smallestLabel = neighborLabels[0];if (cnt == 2 && neighborLabels[1] < smallestLabel)smallestLabel = neighborLabels[1];*data_cur = smallestLabel;// 保存最小等价表for (int k = 0; k < cnt; k++){int tempLabel = neighborLabels[k];int& oldSmallestLabel = labelSet[tempLabel]; //这里的&不是取地址符号,而是引用符号if (oldSmallestLabel > smallestLabel){labelSet[oldSmallestLabel] = smallestLabel;oldSmallestLabel = smallestLabel;}else if (oldSmallestLabel < smallestLabel)labelSet[smallestLabel] = oldSmallestLabel;}}data_cur++;data_prev++;}//更新等价队列表,将最小标号给重复区域for (size_t i = 2; i < labelSet.size(); i++){int curLabel = labelSet[i];int prelabel = labelSet[curLabel];while (prelabel != curLabel){curLabel = prelabel;prelabel = labelSet[prelabel];}labelSet[i] = curLabel;}//second passdata_cur = (int*)labImg.data;for (int i = 0; i < Rows; i++){for (int j = 0; j < bwImg.cols - 1; j++, data_cur++)*data_cur = labelSet[*data_cur];data_cur++;}
}//-------------------------------【老版两步法】-------------------------------------------
void Two_PassOld(const cv::Mat& _binImg, cv::Mat& _lableImg)
{//connected component analysis (4-component)//use two-pass algorithm//1. first pass: label each foreground pixel with a label//2. second pass: visit each labeled pixel and merge neighbor label////foreground pixel: _binImg(x,y) = 1//background pixel: _binImg(x,y) = 0if (_binImg.empty() || _binImg.type() != CV_8UC1){return;}// 1. first pass_lableImg.release();_binImg.convertTo(_lableImg, CV_32SC1);int label = 1; // start by 2std::vector<int> labelSet;labelSet.push_back(0); //background: 0labelSet.push_back(1); //foreground: 1int rows = _binImg.rows - 1;int cols = _binImg.cols - 1;for (int i = 1; i < rows; i++){int* data_preRow = _lableImg.ptr<int>(i - 1);int* data_curRow = _lableImg.ptr<int>(i);for (int j = 1; j < cols; j++){if (data_curRow[j] == 1){std::vector<int> neighborLabels;neighborLabels.reserve(2); //reserve(n) 预分配n个元素的存储空间int leftPixel = data_curRow[j - 1];int upPixel = data_preRow[j];if (leftPixel > 1){neighborLabels.push_back(leftPixel);}if (upPixel > 1){neighborLabels.push_back(upPixel);}if (neighborLabels.empty()){labelSet.push_back(++label); //assign to a new labeldata_curRow[j] = label;labelSet[label] = label;}else{std::sort(neighborLabels.begin(), neighborLabels.end());int smallestLabel = neighborLabels[0];data_curRow[j] = smallestLabel;//save equivalencefor (size_t k = 1; k < neighborLabels.size(); k++){int tempLabel = neighborLabels[k];int& oldSmallestLabel = labelSet[tempLabel];if (oldSmallestLabel > smallestLabel){labelSet[oldSmallestLabel] = smallestLabel;oldSmallestLabel = smallestLabel;}else if (oldSmallestLabel < smallestLabel){labelSet[smallestLabel] = oldSmallestLabel;}}}}}}//update equivalent labels//assigned with the smallest label in each equivalent label setfor (size_t i = 2; i < labelSet.size(); i++){int curLabel = labelSet[i];int prelabel = labelSet[curLabel];while (prelabel != curLabel){curLabel = prelabel;prelabel = labelSet[prelabel];}labelSet[i] = curLabel;}//2. second passfor (int i = 0; i < rows; i++){int *data = _lableImg.ptr<int>(i);for (int j = 0; j < cols; j++){int& pixelLabel = data[j];pixelLabel = labelSet[pixelLabel];}}
}//---------------------------------【种子填充法老版】-------------------------------
void SeedFillOld(const cv::Mat& binImg, cv::Mat& lableImg) //种子填充法
{// 4邻接方法if (binImg.empty() ||binImg.type() != CV_8UC1){return;}lableImg.release();binImg.convertTo(lableImg, CV_32SC1);int label = 1;int rows = binImg.rows - 1;int cols = binImg.cols - 1;for (int i = 1; i < rows - 1; i++){int* data = lableImg.ptr<int>(i);for (int j = 1; j < cols - 1; j++){if (data[j] == 1){std::stack<std::pair<int, int>> neighborPixels;neighborPixels.push(std::pair<int, int>(i, j)); // 像素位置: <i,j>++label; // 没有重复的团,开始新的标签while (!neighborPixels.empty()){std::pair<int, int> curPixel = neighborPixels.top(); //如果与上一行中一个团有重合区域,则将上一行的那个团的标号赋给它int curX = curPixel.first;int curY = curPixel.second;lableImg.at<int>(curX, curY) = label;neighborPixels.pop();if (lableImg.at<int>(curX, curY - 1) == 1){//左边neighborPixels.push(std::pair<int, int>(curX, curY - 1));}if (lableImg.at<int>(curX, curY + 1) == 1){// 右边neighborPixels.push(std::pair<int, int>(curX, curY + 1));}if (lableImg.at<int>(curX - 1, curY) == 1){// 上边neighborPixels.push(std::pair<int, int>(curX - 1, curY));}if (lableImg.at<int>(curX + 1, curY) == 1){// 下边neighborPixels.push(std::pair<int, int>(curX + 1, curY));}}}}}}//-------------------------------------------【种子填充法新版】---------------------------
void SeedFillNew(const cv::Mat& _binImg, cv::Mat& _lableImg)
{// connected component analysis(4-component)// use seed filling algorithm// 1. begin with a forgeground pixel and push its forground neighbors into a stack;// 2. pop the pop pixel on the stack and label it with the same label until the stack is empty// // forground pixel: _binImg(x,y)=1// background pixel: _binImg(x,y) = 0if (_binImg.empty() ||_binImg.type() != CV_8UC1){return;}_lableImg.release();_binImg.convertTo(_lableImg, CV_32SC1);int label = 0; //start by 1int rows = _binImg.rows;int cols = _binImg.cols;Mat mask(rows, cols, CV_8UC1);mask.setTo(0);int *lableptr;for (int i = 0; i < rows; i++){int* data = _lableImg.ptr<int>(i);uchar *masKptr = mask.ptr<uchar>(i);for (int j = 0; j < cols; j++){if (data[j] == 255 && mask.at<uchar>(i, j) != 1){mask.at<uchar>(i, j) = 1;std::stack<std::pair<int, int>> neighborPixels;neighborPixels.push(std::pair<int, int>(i, j)); // pixel position: <i,j>++label; //begin with a new labelwhile (!neighborPixels.empty()){//get the top pixel on the stack and label it with the same labelstd::pair<int, int> curPixel = neighborPixels.top();int curY = curPixel.first;int curX = curPixel.second;_lableImg.at<int>(curY, curX) = label;//pop the top pixelneighborPixels.pop();//push the 4-neighbors(foreground pixels)if (curX - 1 >= 0){if (_lableImg.at<int>(curY, curX - 1) == 255 && mask.at<uchar>(curY, curX - 1) != 1) //leftpixel{neighborPixels.push(std::pair<int, int>(curY, curX - 1));mask.at<uchar>(curY, curX - 1) = 1;}}if (curX + 1 <= cols - 1){if (_lableImg.at<int>(curY, curX + 1) == 255 && mask.at<uchar>(curY, curX + 1) != 1)// right pixel{neighborPixels.push(std::pair<int, int>(curY, curX + 1));mask.at<uchar>(curY, curX + 1) = 1;}}if (curY - 1 >= 0){if (_lableImg.at<int>(curY - 1, curX) == 255 && mask.at<uchar>(curY - 1, curX) != 1)// up pixel{neighborPixels.push(std::pair<int, int>(curY - 1, curX));mask.at<uchar>(curY - 1, curX) = 1;}}if (curY + 1 <= rows - 1){if (_lableImg.at<int>(curY + 1, curX) == 255 && mask.at<uchar>(curY + 1, curX) != 1)//down pixel{neighborPixels.push(std::pair<int, int>(curY + 1, curX));mask.at<uchar>(curY + 1, curX) = 1;}}}}}}
}//---------------------------------【颜色标记程序】-----------------------------------
//彩色显示
cv::Scalar GetRandomColor()
{uchar r = 255 * (rand() / (1.0 + RAND_MAX));uchar g = 255 * (rand() / (1.0 + RAND_MAX));uchar b = 255 * (rand() / (1.0 + RAND_MAX));return cv::Scalar(b, g, r);
}void LabelColor(const cv::Mat& labelImg, cv::Mat& colorLabelImg)
{int num = 0;if (labelImg.empty() ||labelImg.type() != CV_32SC1){return;}std::map<int, cv::Scalar> colors;int rows = labelImg.rows;int cols = labelImg.cols;colorLabelImg.release();colorLabelImg.create(rows, cols, CV_8UC3);colorLabelImg = cv::Scalar::all(0);for (int i = 0; i < rows; i++){const int* data_src = (int*)labelImg.ptr<int>(i);uchar* data_dst = colorLabelImg.ptr<uchar>(i);for (int j = 0; j < cols; j++){int pixelValue = data_src[j];if (pixelValue > 1){if (colors.count(pixelValue) <= 0){colors[pixelValue] = GetRandomColor();num++;}cv::Scalar color = colors[pixelValue];*data_dst++ = color[0];*data_dst++ = color[1];*data_dst++ = color[2];}else{data_dst++;data_dst++;data_dst++;}}}printf("color num : %d \n", num);
}//------------------------------------------【测试主程序】-------------------------------------
int main()
{cv::Mat binImage = cv::imread("sda.jpg", 0);//cv::threshold(binImage, binImage, 50, 1, CV_THRESH_BINARY);cv::Mat labelImg;double time;time = getTickCount();SeedFillNew(binImage, labelImg);time = 1000 * ((double)getTickCount() - time) / getTickFrequency();cout << std::fixed << time << "ms" << endl;//彩色显示/*cv::Mat colorLabelImg;LabelColor(labelImg, colorLabelImg);cv::imshow("colorImg", colorLabelImg);*///灰度显示cv::Mat grayImg;labelImg *= 10;labelImg.convertTo(grayImg, CV_8UC1);cv::imshow("labelImg", grayImg);double minval, maxval;minMaxLoc(labelImg, &minval, &maxval);cout << "minval" << minval << endl;cout << "maxval" << maxval << endl;cv::waitKey(0);return 0;
}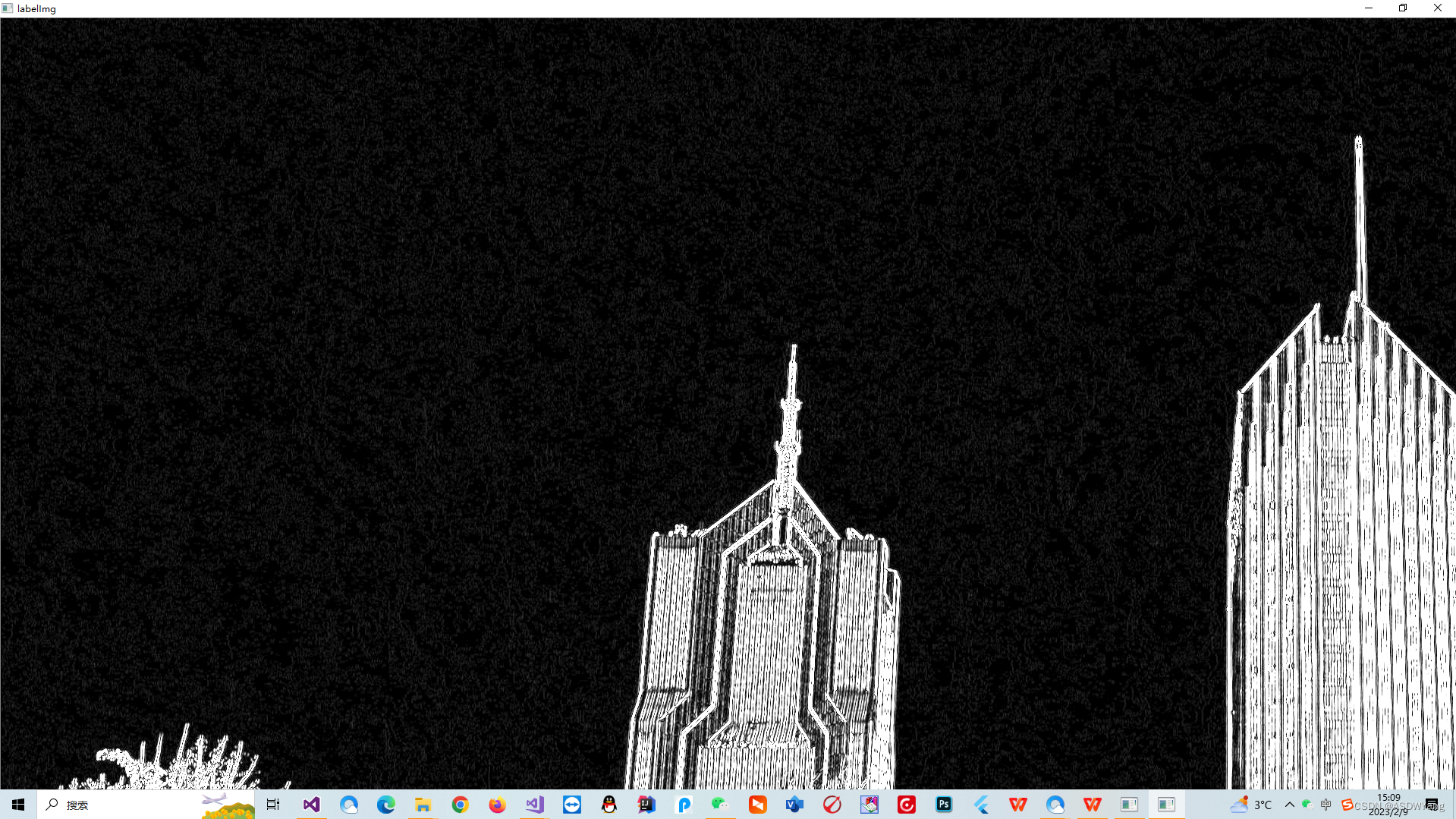
终于知道是啥原因了,我在进行Prewitt算子对边缘进行粗定位检测过后,没有进行去噪处理,一定要把图像转换为二值图像,就方便多了。并且还要记住,霍夫检测的直线像素是255白线才可以,经过长时间的试错终于解决了。输入原图像如下所示,我这里使用的去噪对比了四种,但是下面这种是最好的。Opencv 非局部降噪_51CTO博客_opencv降噪Opencv 非局部降噪,opencv自带的非局部降噪算法:CV_EXPORTS_WvoidfastNlMeansDenoising(InputArraysrc,OutputArraydst,floath=3,inttemplateWindowSize=7,intsearchWindowSize=21);h是过滤强度,templateWindowSize是分块大小,searchWindowSize是搜索区域大小。应用实例intmain(){MatI..https://blog.51cto.com/u_15458280/4843576

#include<opencv2/opencv.hpp>
#include<iostream>
using namespace std;
using namespace cv;//数组从大到小排序
void reserve(int x[], int n) {int i, j, temp;for (i = 0; i < n - 1; i++) { //一共n个元素,则需要比较n-1次for (j = 0; j < n - 1 - i; j++) { //每一个元素需要比较的次数if (x[i] < x[i + j + 1]) {temp = x[i];x[i] = x[i + j + 1];x[i + j + 1] = temp;}}}
}void add_salt_pepper_noise(Mat &image) {RNG rng(12345);int h = image.rows;int w = image.cols;int nums = 10000;for (int i = 0; i < nums; i++) {int x = rng.uniform(0, w);int y = rng.uniform(0, h);if (i % 2 == 1) {image.at<Vec3b>(y, x) = Vec3b(255, 255, 255);}else {image.at<Vec3b>(y, x) = Vec3b(0, 0, 0);}}imshow("salt pepper", image);
}void gaussian_noise(Mat &image) {Mat noise = Mat::zeros(image.size(), image.type());randn(noise, (15, 15, 15), (30, 30, 30));Mat dst;add(image, noise, dst);imshow("gaussian noise", dst);dst.copyTo(image);
}Mat convertTo3Channels(const Mat& binImg)
{Mat three_channel = Mat::zeros(binImg.rows, binImg.cols, CV_8UC3);vector<Mat> channels;for (int i = 0; i < 3; i++){channels.push_back(binImg);}merge(channels, three_channel);return three_channel;
}int main(int argc, char*argv[])
{//加载图像Mat img, gray_image, dst;img = imread("垂直边缘.jpg");Mat img1 = imread("垂直边缘.jpg");//判断图像是否导入成功if (img.empty()){cout << "加载失败" << endl;return -1;}//显示图像namedWindow("original image", WINDOW_AUTOSIZE);imshow("original image", img);//转换灰度图像cvtColor(img, gray_image, COLOR_BGR2GRAY);//获取灰度图像宽度和高度int width = gray_image.cols;int height = gray_image.rows;//遍历像素值(单通道)for (int row = 0; row < height; row++){for (int col = 0; col < width; col++){int gray = gray_image.at<uchar>(row, col);gray_image.at<uchar>(row, col) = 255 - gray; //图像取反};};namedWindow("inv_gray_image", WINDOW_AUTOSIZE);imshow("inv_gray_image", gray_image);Mat sh;fastNlMeansDenoising(gray_image, sh, 21, 7, 21);namedWindow("inv_gray_image1", WINDOW_AUTOSIZE);imshow("inv_gray_image1", sh);waitKey(50);//Mat s;//获取灰度图像宽度和高度width = sh.cols;height = sh.rows;//遍历像素值(单通道)for (int row = 0; row < height; row++){for (int col = 0; col < width; col++){int gray = sh.at<uchar>(row, col);sh.at<uchar>(row, col) = 255 - gray; //图像取反};};namedWindow("inv_gray_image2", WINDOW_AUTOSIZE);imshow("inv_gray_image2", sh);cv::threshold(sh, sh, 50, 255, cv::THRESH_BINARY);cv::namedWindow("二值化", CV_WINDOW_NORMAL);imshow("二值化", sh);vector<Vec4i> lines;HoughLinesP(sh, lines, 1, CV_PI / 180, 50,100, 5);int Length[100] = { 0 };//存放直线长度for (size_t i = 0; i < lines.size(); i++){Vec4i I = lines[i];double x1 = I[0];double y1 = I[1];double x2 = I[2];double y2 = I[3];//筛选满足条件的点if (abs(x1 - x2) + abs(y1 - y2) > 50){Length[i] = sqrt((x1 - x2)*(x1 - x2) + (y1 - y2) * (y1 - y2));//将满足条件的点画出line(img, Point2d(x1, y1), Point2d(x2, y2), Scalar(0, 255, 255), 2);cout << " " << "(" << x1 << "," << y1 << ")" << " " << "(" << x2 << "," << y2 << ")" << endl;//line(canny, Point2d(x1, y1), Point2d(x2, y2), Scalar(0, 255, 255), 2);}}Mat imgShow;imgShow = img;resize(imgShow, imgShow, Size(imgShow.cols / 4, imgShow.rows / 4));imshow("imgShow", imgShow);imwrite("shuchu.png", imgShow);reserve(Length, 100);for (int i = 0; i < 100; i++) {cout << "长度" << Length[i] << endl; //输出排序后的数组元素}for (size_t i = 0; i < lines.size(); i++){Vec4i I = lines[i];double x1 = I[0];double y1 = I[1];double x2 = I[2];double y2 = I[3];cout << "sdjk" << endl;cout << int(sqrt((x1 - x2)*(x1 - x2) + (y1 - y2) * (y1 - y2))) << endl;//筛选满足条件的点if ((int(sqrt((x1 - x2)*(x1 - x2) + (y1 - y2) * (y1 - y2))) == Length[0]) || (int(sqrt((x1 - x2)*(x1 - x2) + (y1 - y2) * (y1 - y2))) == Length[1])){//将满足条件的点画出line(img1, Point2d(x1, y1), Point2d(x2, y2), Scalar(0, 255, 255), 2);cout << "djfkljsa " << "(" << x1 << "," << y1 << ")" << " " << "(" << x2 << "," << y2 << ")" << endl;//line(canny, Point2d(x1, y1), Point2d(x2, y2), Scalar(0, 255, 255), 2);}}imgShow = img1;resize(imgShow, imgShow, Size(imgShow.cols / 4, imgShow.rows / 4));imshow("imgShow2", imgShow);imwrite("shuchu2.png", imgShow);waitKey(0);return 0;
};结果图如下所示:
终于弄出来了,去干饭。
相关文章:
提取接近竖直物体(粗定位)
由于项目的需要提取图像之中的一个接近于竖直的物体,一般的方法是进行图像分割,分割方式使用什么OTSU方式以及hsv方法等等。但是项目中使用的相机是黑白相机,会受到一定的限制。因此想到的是使用线条提取方式。线条提取方式之中最好的方法是使…...
程序环境和预处理
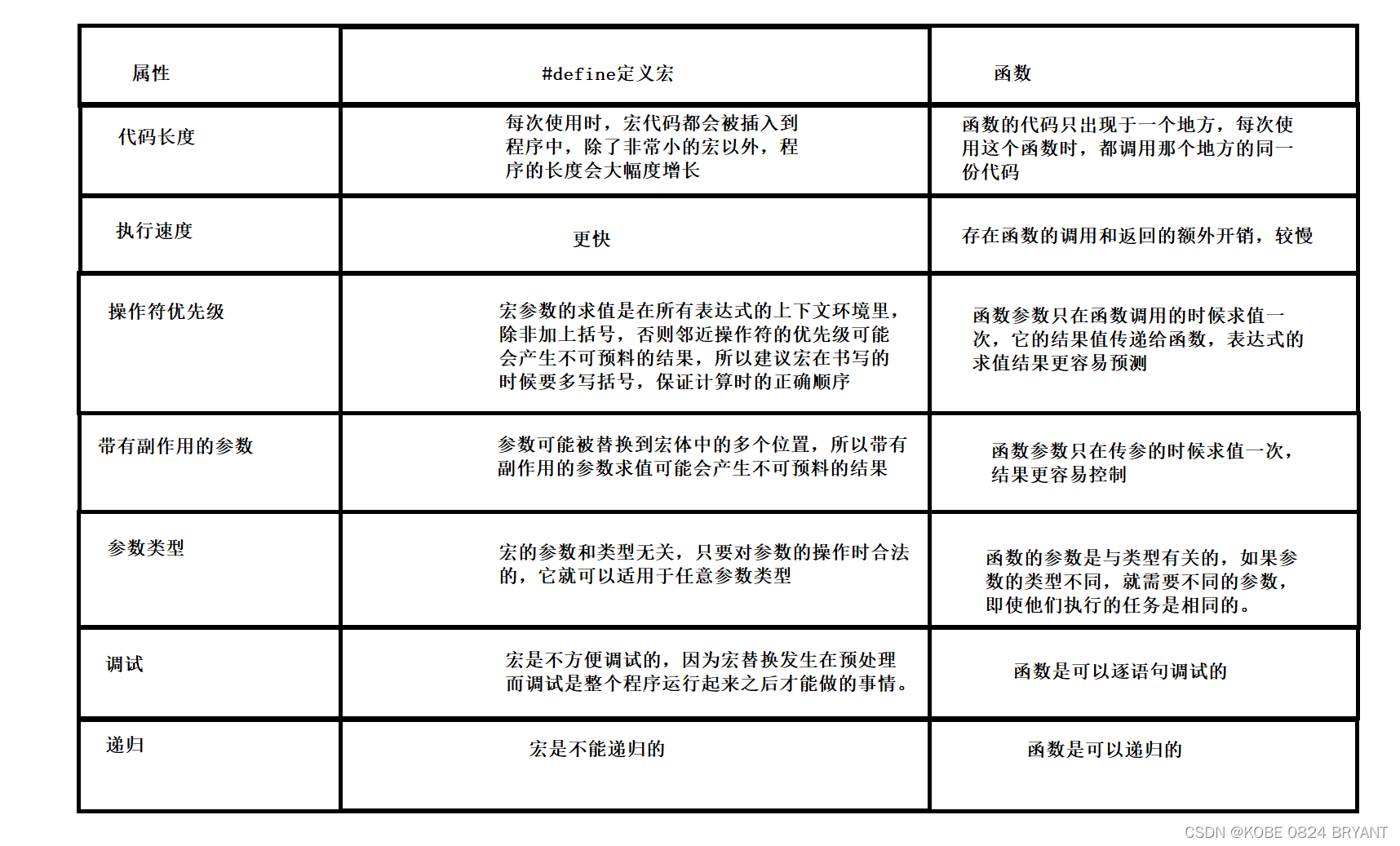
目录一、程序的翻译环境和执行环境二、编译链接2.1 翻译环境2.2 编译2.2.1 预处理2.2.2 编译2.2.3 汇编2.3 链接2.4 结果三、运行环境四、预处理详解4.1 #define4.1.1 #define定义标识符4.1.2 #define定义宏4.1.3 #define 替换规则4.1.4 #和##4.1.5 带副作用的宏参数4.1.6 宏和…...
财报解读:业务复苏迹象明显,中国中免能否重写增长神话?
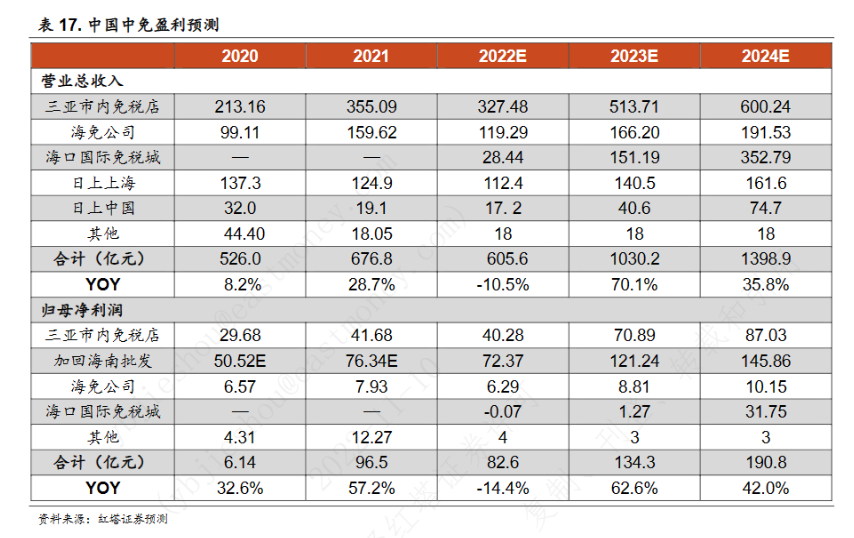
2月3日,中国中免披露2022年度业绩快报,2022年总营收为544.63亿元,同比下降19.52%;实现归属于上市公司股东的净利润50.25亿元,同比下降47.95%。来源:中国中免2022年度业绩快报业绩近乎腰斩,但从长…...

macOS中虚拟机桥接模式分配静态ip
1.首先使用dhclient命令,在局域网中分配一个C类地址。 2.获得地址后,输入ifconfig,查看分配的地址。 3.然后编辑vi /etc/sysconfig/network-scripts/ifcfg-en***文件 在该配置文件中编辑,设置ONBOOTyes,而后添加静态配…...
prometheus increase函数统计得到小数
今天发现prometheus的increase函数得到了小数,研究一下源码,以下是rate/increase/delta 对应的计算函数https://github.com/prometheus/prometheus/blob/d77b56e88e3d554a499e22d2073812b59191256c/promql/functions.go#L55// extrapolatedRate is a uti…...

C++学习记录——유 类和对象(3)
文章目录1、赋值运算符重载1、运算符重载1、理解2、运算符重载实例2、赋值运算符重载2、日期类的实现1、加减函数1、加函数2、减函数2、前/后置--重载3.两个日期相减其他1、流插入2、流提取日期类的整体实现代码: https://gitee.com/kongqizyd/start-some-c-codes-for-learning…...

基于Hi3861平台的OpenHarmony程序是如何启动运行的
一、前言 在继续后面课程的内容讲解前,我们要知道在H3861平台上编写的代码到底是如何启动的,这一点很重要。 先分析HelloWorld程序的启动运行流程,并顺便讲解OpenHarmony在H3861平台的,系统是从哪里启动的。 反着推导函数之间具体…...
2023彻底解决Typora使用iPic微博图床失效问题
一、问题描述用Typora搭配iPic图床使用,最近csdn图片显示不出来用浏览器打开图片显示403,这里原因是微博图床出问题了导致的而使用iPic其他图床则需要一直付费,那有没有一劳永逸的解决所有问题呢?二、旧图恢复首先怎么找回旧图&am…...
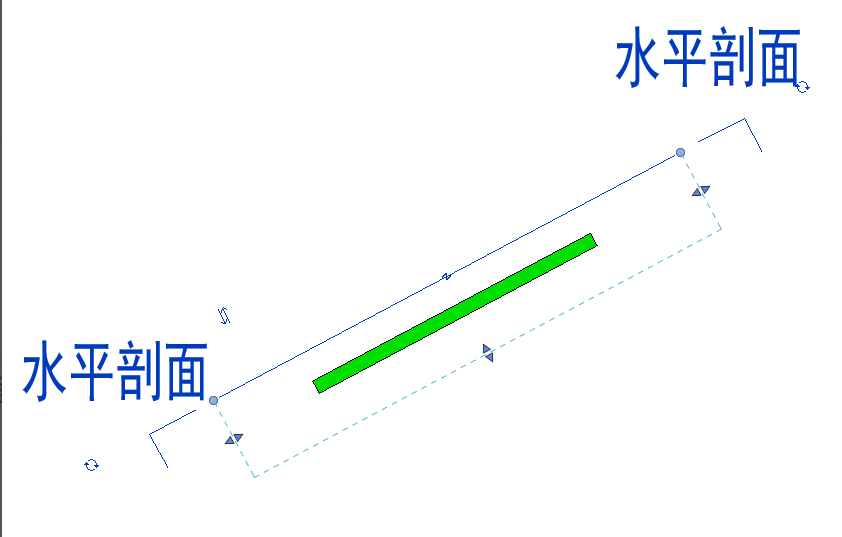
Revit中添加水平仰视平面图及水平剖面
一、 Revit中如何添加水平仰视平面图 在Revit平面视图中视角是俯视视角,但是在一些特殊的情况下,我们可能需要创建仰视视角的平面视图,例如我们需要向上看天花板的灯具布置的时候。 1.下面讲一下如何在添加仰视平面视图的方法。如图1在模型中…...

Python 循环语句
Python的循环语句,程序在一般情况下是按顺序执行的。编程语言提供了各种控制结构,允许更复杂的执行路径。循环语句允许我们执行一个语句或语句组多次,下面是在大多数编程语言中的循环语句的一般形式:Python 提供了 for 循环和 whi…...

使用 ThreeJS 实现第一个三维场景(详)
文章目录参考描述index.html三维场景的基本实现导入 ThreeJS准备工作场景摄像机视锥体正交摄像机透视摄像机渲染器后续处理将摄像机添加至场景中移动摄像机设置画布尺寸将渲染器创建的画布添加到 HTML 元素中渲染物体结构材质合成将物体添加至场景中代码总汇执行效果动画reques…...

《小猫猫大课堂》三轮5——动态内存管理(通讯录动态内存化)
宝子,你不点个赞吗?不评个论吗?不收个藏吗? 最后的最后,关注我,关注我,关注我,你会看到更多有趣的博客哦!!! 喵喵喵,你对我真的很重…...
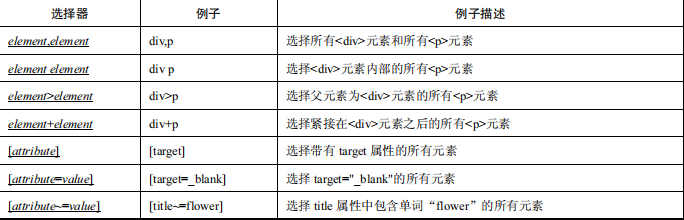
【Selenium学习】Selenium 八大定位法
1.1 ID定位HTML Tag 的 id 属性值是唯一的,故不存在根据 id 定位多个元素的情况。下面以在百度首页搜索框输入文本“python”为例。搜索框的 id 属性值为“kw”,如图1.1所示:代码如下,“find_element_by_id”方法已废弃࿰…...

算法训练营 day41 贪心算法 单调递增的数字 买卖股票的最佳时机含手续费
算法训练营 day41 单调递增的数字 买卖股票的最佳时机含手续费 单调递增的数字 738. 单调递增的数字 - 力扣(LeetCode) 当且仅当每个相邻位数上的数字 x 和 y 满足 x < y 时,我们称这个整数是单调递增的。 给定一个整数 n ,…...
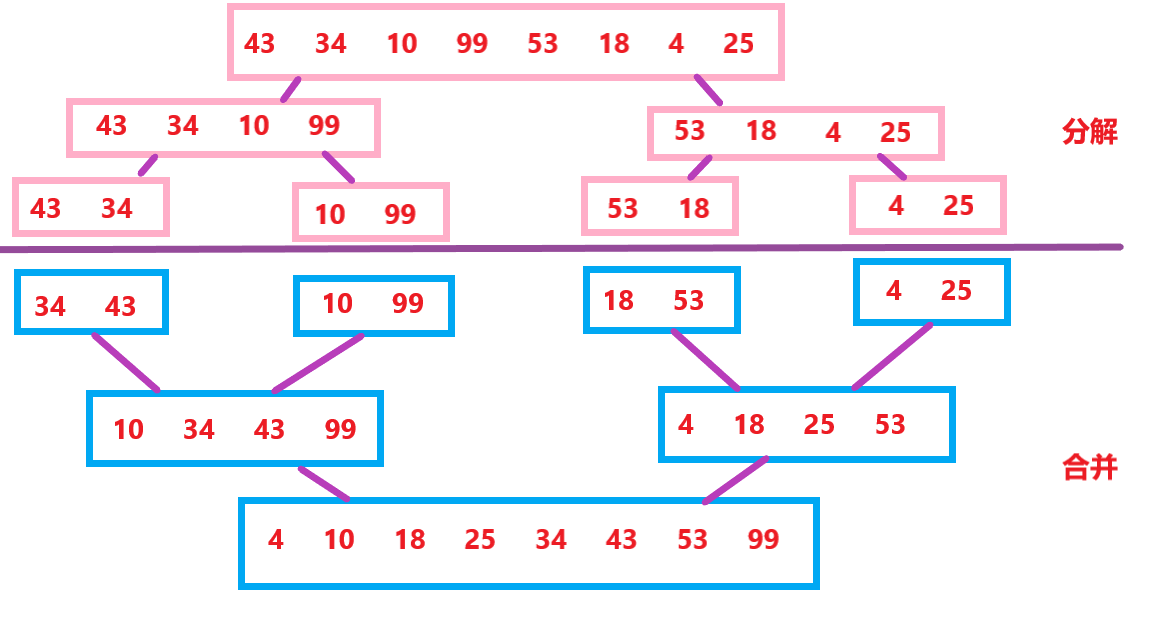
【数据结构-JAVA】排序
排序在现实生活中的应用可谓相当广泛,比如电商平台中,选购商品时,使用价格排序或是综合排序、高考填报志愿的时候,会参考全国大学排名的情况。下面介绍一些计算机中与排序相关的概念:排序:所谓排序…...

基于注解管理Bean
一、介绍从 Java 5 开始,Java 增加了对注解(Annotation)的支持,它是代码中的一种特殊标记,可以在编译、类加载和运行时被读取,执行相应的处理。开发人员可以通过注解在不改变原有代码和逻辑的情况下&#x…...

Containerd 的 Bug 导致容器被重建!如何避免?
作者简介邓宇星,SUSE Rancher 中国区软件架构师,6 年云原生领域经验,参与Rancher 1.x 到 Rancher 2.x 版本迭代,目前负责 Rancher For openEuler(RFO) 项目开发。最近我们关注到一个关于 containerd 运行时的 issue(https://g…...
win环境安装部署Jenkins
win环境安装部署Jenkins,2022年11月:从2022年 6 月 28 日发布的 Jenkins 2.357 和2022年9 月发布的 LTS 版本开始,Jenkins 需要 Java 11 才能使用,放弃 Java 8,如果用JDK1.8,那么Jenkins版本需要是2.357版本…...

网络变压器与不同芯片之间的匹配原则及POE通讯产品需要注意哪些方面
Hqst盈盛电子导读:网络变压器与不同芯片之间的匹配原则及POE通讯产品需要注意哪些方面网络变压器与不同芯片之间的匹配原则:一,电流型PHY芯片一般要配的网络变压器:1、变压器PHY侧3线共模电感 (更适合POE产品ÿ…...

Spring WebFlux
目录 基于注解编程模型 函数式编程模型 传统的基于Servlet的Web框架,如Spring MVC,在本质上都是阻塞和多线程的,每个连接都会使用一个线程。在请求处理的时候,会在线程池中拉取一个工作者( worker )线程来对请求进行处理。同时,请求线程是阻塞的,直到工作者线程提示它已…...

OpenLayers 可视化之热力图
注:当前使用的是 ol 5.3.0 版本,天地图使用的key请到天地图官网申请,并替换为自己的key 热力图(Heatmap)又叫热点图,是一种通过特殊高亮显示事物密度分布、变化趋势的数据可视化技术。采用颜色的深浅来显示…...
iPhone密码忘记了办?iPhoneUnlocker,iPhone解锁工具Aiseesoft iPhone Unlocker 高级注册版分享
平时用 iPhone 的时候,难免会碰到解锁的麻烦事。比如密码忘了、人脸识别 / 指纹识别突然不灵,或者买了二手 iPhone 却被原来的 iCloud 账号锁住,这时候就需要靠谱的解锁工具来帮忙了。Aiseesoft iPhone Unlocker 就是专门解决这些问题的软件&…...

【Oracle】分区表
个人主页:Guiat 归属专栏:Oracle 文章目录 1. 分区表基础概述1.1 分区表的概念与优势1.2 分区类型概览1.3 分区表的工作原理 2. 范围分区 (RANGE Partitioning)2.1 基础范围分区2.1.1 按日期范围分区2.1.2 按数值范围分区 2.2 间隔分区 (INTERVAL Partit…...

rnn判断string中第一次出现a的下标
# coding:utf8 import torch import torch.nn as nn import numpy as np import random import json""" 基于pytorch的网络编写 实现一个RNN网络完成多分类任务 判断字符 a 第一次出现在字符串中的位置 """class TorchModel(nn.Module):def __in…...
10-Oracle 23 ai Vector Search 概述和参数
一、Oracle AI Vector Search 概述 企业和个人都在尝试各种AI,使用客户端或是内部自己搭建集成大模型的终端,加速与大型语言模型(LLM)的结合,同时使用检索增强生成(Retrieval Augmented Generation &#…...

Mysql中select查询语句的执行过程
目录 1、介绍 1.1、组件介绍 1.2、Sql执行顺序 2、执行流程 2.1. 连接与认证 2.2. 查询缓存 2.3. 语法解析(Parser) 2.4、执行sql 1. 预处理(Preprocessor) 2. 查询优化器(Optimizer) 3. 执行器…...
LLMs 系列实操科普(1)
写在前面: 本期内容我们继续 Andrej Karpathy 的《How I use LLMs》讲座内容,原视频时长 ~130 分钟,以实操演示主流的一些 LLMs 的使用,由于涉及到实操,实际上并不适合以文字整理,但还是决定尽量整理一份笔…...
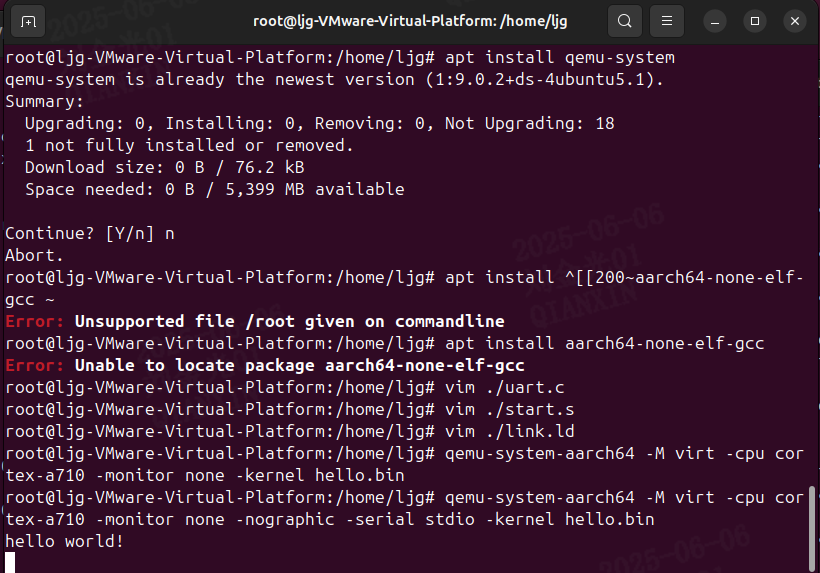
Qemu arm操作系统开发环境
使用qemu虚拟arm硬件比较合适。 步骤如下: 安装qemu apt install qemu-system安装aarch64-none-elf-gcc 需要手动下载,下载地址:https://developer.arm.com/-/media/Files/downloads/gnu/13.2.rel1/binrel/arm-gnu-toolchain-13.2.rel1-x…...
系统掌握PyTorch:图解张量、Autograd、DataLoader、nn.Module与实战模型
本文较长,建议点赞收藏,以免遗失。更多AI大模型应用开发学习视频及资料,尽在聚客AI学院。 本文通过代码驱动的方式,系统讲解PyTorch核心概念和实战技巧,涵盖张量操作、自动微分、数据加载、模型构建和训练全流程&#…...

java高级——高阶函数、如何定义一个函数式接口类似stream流的filter
java高级——高阶函数、stream流 前情提要文章介绍一、函数伊始1.1 合格的函数1.2 有形的函数2. 函数对象2.1 函数对象——行为参数化2.2 函数对象——延迟执行 二、 函数编程语法1. 函数对象表现形式1.1 Lambda表达式1.2 方法引用(Math::max) 2 函数接口…...