基于深度学习的目标姿态检测方法_kaic
目录
摘要
第1章 引言
1.1 研究背景和意义
1.2 国内外研究现状
1.3 主要内容
第2章 单目相机的目标姿态检测技术
2.1单目相机的工作原理
2.2目标姿态检测
2.3已有的目标姿态检测方法及其局限性
2.4本章总结
第3章 构建数据集
3.1 数据集来源
3.2数据集标注
3.3数据集分析
3.4本章小结
第4章 基于深度学习的目标姿态检测方法
4.1 YOLO算法简介
4.2YOLO的网络结构
4.3实验验证与分析
4.4与传统方法的对比分析
4.5本章小结
5.1 研究成果总结
5.2 未来研究方向展望
致谢
参考文献
摘要
伴随着人工智能技术的发展,物体探测和辨识技术已被广泛用于各个领域,而作为物体探测的一个重要分支,物体姿态探测在机器人控制、自动驾驶等领域中扮演着重要角色。本文的目的在于探究基于单目相机的目标三维姿态检测方法,以实现对目标物体的快速、精确的三维姿态检测和识别,提高目标检测的准确率和效率,并为人工智能技术的发展提供新的思路和方法。
本文系统地介绍了基于单目相机的三维目标检测技术,并详细讨论了基于深度学习的单阶段目标检测算法,即YOLOv5算法。具体来说,本文采用YOLOv5算法搭建神经网络模型,在KITTI数据集构建训练集后对模型进行训练,再采集部分环境照片以及KITTI数据的部分照片构建测试集,放入优化过的模型中进行测试,并对测试结果进行分析,以判断该算法在三维目标检测上的优缺点。
最终,通过实验验证以及对测试结果的分析,我们得出了本论文提出的观点,即YOLOv5算法能够有效地提高目标检测的精度和效率。同时,相比于其他目标检测算法,YOLOv5更适合处理目标数量多和小目标的情况。然而,YOLOv5的检测效果可能会受到复杂场景的影响,而为了达到最好的算法性能和准确度,需要具备比较充分的训练数据。因此,在未来的研究中,我们将进一步探索如何改进该方法,以提高检测的效率和准确度,以更好地适应实际应用的需求。
关键词:单目相机,目标检测,三维姿态检测,YOLOv5算法
Abstract
With the development of artificial intelligence technology, object detection and recognition techniques have been widely used in various fields, and as an important branch of object detection, object pose detection plays an important role in areas such as robot control and autonomous driving. As an important branch of target detection, target pose detection plays an important role in controlling robots, automatic driving, etc. The purpose of this paper is to explore a three-dimensional target pose detection method based on a monocular camera, which can achieve rapid and accurate detection and recognition of target objects, improve the accuracy and efficiency of target detection, and provide new ideas and methods for the development of artificial intelligence technology.
This paper systematically introduces the three-dimensional target detection technology based on a monocular camera and discusses in detail the single-stage target detection algorithm based on deep learning, namely YOLOv5 algorithm. Specifically, this paper uses the YOLOv5 algorithm to build a neural network model, trains it on the training set constructed from the KITTI dataset, collects some environment photos and partial photos of the KITTI dataset to build the test set, puts them into the optimized model for testing, and analyzes the test results to judge the advantages and disadvantages of this algorithm in three-dimensional target detection.
Finally, through experimental verification and analysis of the test results, we conclude that the YOLOv5 algorithm can effectively improve the accuracy and efficiency of target detection. Compared with other target detection algorithms, YOLOv5 is more suitable for processing cases with multiple small targets. However, the detection effect of YOLOv5 may be affected by complex scenes, and sufficient training data are needed to achieve the best algorithm performance and accuracy. Therefore, in future research, we will further explore how to improve this method to improve the efficiency and accuracy of detection, in order to better meet the needs of practical applications.
Keywords: Monocular camera; Target detection; The three-dimensional pose detection;The YOLOv5 algorithm.
第1章 引言
1.1 研究背景和意义
近年来,三维姿态估计技术在许多领域得到了广泛应用,如智能驾驶、虚拟现实、人机交互等。其中,基于单目相机的三维姿态估计方法更是受到了很多学者的关注。目前基于单目相机的三维姿态估计方法大致可以分为两个研究方向,即基于二维姿态估计的两阶段三维姿态估计方法和直接由单目相机推断的端到端的三维人体姿态估计[1]。基于单目RGB图像的方法因其数据采集性能优越和应用广泛而发展较早。但基于图像序列、深度信息的方法以及色彩与深度融合的方法在提升三维人体姿态估计效果方面同样也具有重要的优势[2]。
基于单目RGB图像视频的三维姿态估计是目前的热点问题,且在智能驾驶等领域有着重要的作用。但由于RGB相机无法获得深度值,基于单目RGB相机的人体姿态估计仍然存在一些困难[3]。通常使用神经网络自动推断三维人体关节的三维坐标点来进行姿态估计,但是由于自遮挡等问题,许多姿态估计的准确度并不高。
因此,研究基于单目相机的目标三维姿态检测方法具有重要意义。该研究旨在解决现有方法中存在的问题,提高三维人体姿态估计的精度和效率。研究方法将综合利用单目RGB图像、深度信息和视频序列等多种信息,构建更加准确、鲁棒的三维姿态估计模型。最终,通过该研究的成果,将为智能驾驶、虚拟现实、人机交互等领域提供更加可靠、高效的三维姿态估计技术。
另外,目标三维姿态检测作为机器视觉领域中的一项关键技术,对于许多应用来说,如人机交互、运动控制、自主导航等,都具有重要意义。目前,单目相机的目标姿态检测技术尚存在许多挑战,例如姿态估计准确度不高、鲁棒性差、计算速度慢等问题。本文旨在研究基于单目相机的目标三维姿态检测方法,提高检测准确率和鲁棒性,降低计算复杂度,为机器视觉技术的应用提供有力支撑。
视觉目标检测是计算机视觉的经典任务,旨在定位图像中存在物体的位置并识别物体的具体类别。目标检测是许多计算机视觉任务及相关应用的基础与前提,直接决定相关视觉任务及应用的性能好坏[4]。因此,视觉目标检测技术受到了学术界、工业界等各领域、乃至世界各国政府的广泛关注。在学术界,目标检测一直是各大计算机视觉会议及期刊的研究热点之一,每年有大量的目标检测相关论文发表。根据谷歌学术显示,研究人员近10年来在目标检测方面发表论文15 000余篇。在工业界,国内外科技巨头(如谷歌、脸书、华为和百度等)、初创公司(如商汤、旷视等)纷纷在目标检测相关领域投入大量人力财力。同时,目标检测技术也是新一代人工智能的重要共性关键技术。
在过去的几十年里,目标检测经历了基于手工设计特征的方法到基于深度特征的方法等不同发展阶段。早期,目标检测方法通常采用手工设计特征加浅层分类器的技术路线,例如支持向量机和AdaBoost等[5],涌现了包括Haar特征、方向梯度直方图特征等一系列经典的目标检测特征描述子。2012年以来,深度学习技术取得了飞速的发展,并行计算资源不断迭代更新,大规模数据库及评测标准相继构建与公开。基于上述技术、算力和数据的铺垫,视觉目标检测开始在精度与效率等方面取得了显著的进展,先后涌现出区域卷积神经网络、SSD、YOLO、DETR等一系列经典的研究工作。相比于传统手工设计特征的方法,基于深度学习的方法避免了烦琐的手工设计过程,能够自动学习更具有区分力的深度特征。与此同时,基于深度学习的方法将特征提取和分类器学习统一在一个框架中,能够进行端到端的学习[6]。
综上所述,本文旨在研究基于单目相机的目标三维姿态检测方法,通过对比其他目标姿态检测技术的现状和不足,提出一种有效的目标姿态检测方法即YOLOv5算法,以期更好地解决实际应用中面临的问题。
1.2 国内外研究现状
目标姿态检测技术是机器视觉研究中的重要领域之一,其方法主要包括基于特征点匹配、基于深度学习和基于多视角等方案。基于特征点匹配的方法通过提取图像中的特征点进行匹配[7],根据相机的内外参数估计目标的姿态,但该方法受制于噪声和遮挡等因素,鲁棒性差。基于深度学习的方法则可以自动地从数据中学习到目标姿态的特征表示,有效解决了特征点匹配方法存在的问题,但其应用需依靠大量标注样本,且需要较强的计算能力。而基于多视角的方法则通过多个视角的图像组合来获取目标姿态信息,提高了估计的准确性和鲁棒性。但是多视角的方法需消耗更多成本,且难以实现自主控制。
现在,单目相机主要用于车载测距,包括主动测距和被动测距。主动测距主要使用激光、雷达等技术,例如Kang Seungnam提出的利用线激光与单目测距相结合的测量方法[8],在测量60米距离时误差不超过2米,其本质特点在于参数的实时标定。Lim JH等人提出了利用GPS和单目摄像头进行定位的方法,具有极高的准确性和可用性。WK等人提出了利用单目摄像头与激光测距仪集成的方法进行测距。而被动测距主要是采用视频测距技术,例如索文杰构造的智能车辆防撞系统。另外,探索将神经网络、深度学习等方法引入到车载单目视觉测距领域中也取得了进展,例如Awasthi A等人提出的基于单目视觉的防撞系统距离估计方法和Han J S Lessmann等人提出的基于概率的单目视觉距离估计方法,剑桥大学Kendall A等人利用深度卷积神经网络,以几何损失函数作为学习函数进行定位,实时性与准确性较好。CaoY等人利用深度全卷积神经网络对每个像素的深度进行学习与预测,预测准确度较高,速度也较快,但卷积核的设计比较困难。由于基于神经网络、深度学习的单目视觉测距方法需要大量数据进行学习,并且得到的模型泛化能力受到很多因素的制约,因此在车载单目视觉测距过程中[9],在目前的技术条件下,在车载单目视觉测距过程中,其应用范围、实时性和准确性都难以同时满足智能车和无人车的要求。因此,未来需要进一步的研究开发,以提高基于单目视觉的目标姿态检测技术在车载视觉测距领域中的应用范围和效果。此外,整合多种传感器和算法,例如基于深度学习和多视角的方法,可能是发展方向之一,将会进一步提高目标姿态检测技术在车载测距中的性能表现。此外,将目标姿态检测技术与自动驾驶技术结合,可以实现车辆自主地感知周围环境并做出相应决策,实现无人驾驶[10]。例如,基于深度学习的单目视觉测距技术可以与雷达、激光雷达、摄像头等多传感器技术融合,以提高无人驾驶车辆的感知性能和安全性。另外,针对单目视觉测距技术在数据量、模型泛化和实时性等方面的问题,还可以研究基于小样本学习、迁移学习、增量学习等技术来解决这些问题,以进一步提升单目视觉测距技术的性能和实用性。综上所述,目标姿态检测技术在车载测距技术中具有广泛的研究和应用前景,且有望在未来实现无人驾驶技术的商用化落地。最后,还需要指出的是,研究目标姿态检测技术在车载测距中的应用还涉及到一系列的其他挑战和难点,例如数据的收集和标注、算法的优化和实时性、系统的集成和部署等方面。在未来的研究中,需要结合实际应用场景,不断完善车载测距技术,探索创新的解决方案,以促进目标姿态检测技术在车载测距中的进一步应用和发展,并为实现智能交通和无人驾驶技术的普及奠定坚实基础。
1.3 主要内容
本论文的目的在于通过学习和掌握卷积神经网络和图像处理的理论知识,应用单目相机的基本原理以及三维检测的基本步骤,结合pytorch等相关软件,构建基于YOLOv5算法的三维目标检测模型。为了检验所构建模型的准确性,本文采用了labelimg软件构建了数据集进行训练和测试,并进行了对比分析。具体地,本论文与其他数据进行了比较,分析了在现实交通场景中,哪些算法在车辆的三维姿态检测方面更具可行性,以及这些算法之间的优缺点。通过实验结果,本论文得出了结论:在三维姿态检测领域中,基于YOLOv5的算法可以很好地应用于单目相机的情景中,而且其准确度和可行度均优于其他模型,并且在取得较高准确度的前提下优化了速度。因此,本文的研究对于推进三维姿态检测领域的技术研究和应用具有一定的参考意义。
相关文章:
基于深度学习的目标姿态检测方法_kaic
目录 摘要 第1章 引言 1.1 研究背景和意义 1.2 国内外研究现状 1.3 主要内容 第2章 单目相机的目标姿态检测技术 2.1单目相机的工作原理 2.2目标姿态检测 2.3已有的目标姿态检测方法及其局限性 2.4本章总结 第3章 构建数据集 3.1 数据集来源 3.2数据集标注 3.3数据集分析 3.4本…...
Pycharm设置Python每个文件开头自定义模板(带上声明字符编码、作者名、时间等)
Pycharm设置地址: 在File---settings---Editor---File and Code Templates---Python script 脚本里添加: 模板声明设置参考: # ---encoding:utf-8--- # Time : ${DATE} ${HOUR}:${MINUTE} # Author : 作者名 # Email :你的邮箱 # Sit…...

Gem相关操作命令
Gem相关操作命令 gem -v # 查看 gem 版本gem source # 查看 gem 配置源 gem source -l # 查看 gem 配置源目录 gem sources -a url # 添加 gem 配置源(url 需换成网址) gem sources --add url # 添加 gem 配置源(url 需换成网址)…...

软件测试2023年行情怎么样?仔细讲解!
目录 前言: 普通功能测试人员不建议跳槽 还有一个要求就是要对业务的极致理解 那么产业互联网趋势会导致什么呢? 现在跳槽涨薪需要掌握到什么样的技术呢? 给大家一些跳槽建议 前言: 软件测试是为了发现程序中的错误而执行程序的…...

【1130. 叶值的最小代价生成树】
来源:力扣(LeetCode) 描述: 给你一个正整数数组 arr,考虑所有满足以下条件的二叉树: 每个节点都有 0 个或是 2 个子节点。数组 arr 中的值与树的中序遍历中每个叶节点的值一一对应。每个非叶节点的值等于…...

Linux各个目录的全称及含义
/ 根目录,包含整个文件系统的根节点。 /bin : Binary Directory 二进制文件目录,包含一些基本的可执行程序。 /boot : Boot Directory 包含启动系统所需的文件,如内核和引导程序。 /dev : Device Directory 设备文件目录,…...
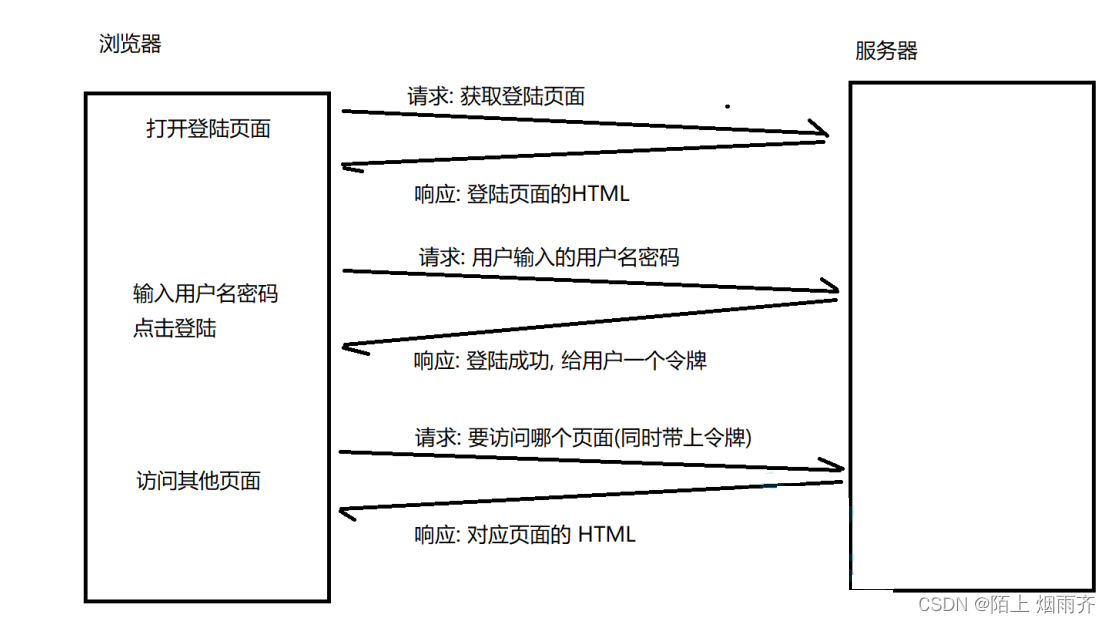
Cookie和Session原理详解
目录 前言 Cookie Session 会话机制 Cookie和Session的区别 Servlet中对Session和Cookie的封装 代码实例:实现用户登录 约定前后端交互的接口 前端页面: 后端实现 login index 总结 前言 在web的发展史中,我们知道浏览器和服务…...

小程序自动化测试
背景 近期团队打算做一个小程序自动化测试的工具,期望能够做到业务人员操作一遍小程序后,自动还原之前的操作路径,并且捕获操作过程中发生的异常,以此来判断这次发布是否会影响小程序的基础功能。 上述描述看似简单,…...

【linux系统操作】 - 技术一览
文章目录 1. 用户管理2. 文件管理3. 文件系统4. 字符处理5. 网络管理6. 进程管理7. 软件安装8. vi和vim编辑器9. 正则表达式 1. 用户管理 1.用户和用户组 2.账号管理 新增和删除用户、组;检查用户信息切换用户信息、用其他用户身份执行例行任务管理 : 周期性执行任…...

yield和sleep 区别
yield和sleep对比 sleepyieldsleep会导致当前线程暂停指定的时间,没有CPU时间片的消耗。yield只是对CPU调度器的一个提示,如果CPU调度器没有忽略这个提示,它会导致线程上下文的切换。sleep会使线程短暂block,会在给定的时间内释放…...

Redis 注册服务,自动启动
通常情况下我们可以通过 redis-server.exe 和配置文件启动redis服务 : 命令: redis-server.exe redis.windows.conf 另外开启一个命令行窗口 redis-cli.exe 即可做一些简单的操作命令行 但如果我们关闭控制台,那么Redis服务也跟随着一起关闭了&#x…...

华为OD机试真题 Java 实现【字符统计】【2023 B卷 100分】
一、题目描述 输入一个只包含小写英文字母和数字的字符串,按照不同字符统计个数由多到少输出统计结果,如果统计的个数相同,则按照ASCII码由小到大排序输出。 数据范围:字符串长度满足 1≤len(str)≤1000 。 二、输入描述 一个只包含小写英文字母和数字的字符串。 三、…...

ASP.NET Core MVC 从入门到精通之自动映射(一)
随着技术的发展,ASP.NET Core MVC也推出了好长时间,经过不断的版本更新迭代,已经越来越完善,本系列文章主要讲解ASP.NET Core MVC开发B/S系统过程中所涉及到的相关内容,适用于初学者,在校毕业生,…...
4. WebGPU 存储缓冲区 (WebGPU Storage Buffers)
这篇文章是关于存储缓冲区的,我们从上一篇文章暂停的地方继续。 存储缓冲区在许多方面类似于统一缓冲区。如果我们所做的只是将 JavaScript 中的 UNIFORM 更改为 STORAGE 并将 WGSL 中的 var 更改为 var<storage, read> ,那么上一页中的示例就可以…...

ChatGPT 插件功能深度解析:acquire、scholarai、form
引言 在我们的日常工作中,插件扮演着重要的角色,它们可以帮助我们提高工作效率,简化复杂的任务。在这篇文章中,我将详细介绍三个非常实用的插件:acquire、scholarai和form。 1、acquire 插件详解 acquire插件是一个…...

【面试集锦 - 汽车电子 - ASPICE]
ASPICE ASPICE(Automotive Software Performance Improvement and Capability dEtermination)是一种针对汽车电子行业的软件过程评估和改进模型。它是一种国际标准,旨在帮助汽车制造商和供应商评估和改进其软件开发过程的能力,以…...

深入探索Vue.js响应式原理及其实现机制
导语:Vue.js的核心特性之一是其强大的响应式系统,它使得数据和视图能够自动保持同步。在本文中,我们将深入探索Vue.js的响应式原理及其实现机制,帮助您更好地理解Vue.js的工作方式。 数据劫持:Vue.js的响应式系统通过数…...

Spark SQL概述、数据帧与数据集
文章目录 一、准备工作1、准备数据文件2、启动Spark Shell 二、加载数据为Dataset1、读文件得数据集 三、给数据集添加元数据信息1、定义学生样例类2、导入隐式转换3、将数据集转换成学生数据集4、对学生数据集进行操作(1)显示数据集内容(2&a…...

c# cad 二次开发 类库 CAD表格的操作,给CAD添加一个表格
c# cad 二次开发 类库 CAD表格的操作,给CAD添加一个表格 using Autodesk.AutoCAD.ApplicationServices; using Autodesk.AutoCAD.Colors; using Autodesk.AutoCAD.DatabaseServices; using Autodesk.AutoCAD.EditorInput; using Autodesk.AutoCAD.Geometry; using A…...

单点登录的两种实现方式,分别有啥优缺点?
单点登录(Single Sign-On,简称SSO)是指在多个应用系统中,用户只需要登录一次,就可以访问所有已授权的系统资源的一种身份认证技术。SSO可以提升用户体验,减少用户密码管理工作量,并加强安全管理…...

使用docker在3台服务器上搭建基于redis 6.x的一主两从三台均是哨兵模式
一、环境及版本说明 如果服务器已经安装了docker,则忽略此步骤,如果没有安装,则可以按照一下方式安装: 1. 在线安装(有互联网环境): 请看我这篇文章 传送阵>> 点我查看 2. 离线安装(内网环境):请看我这篇文章 传送阵>> 点我查看 说明:假设每台服务器已…...
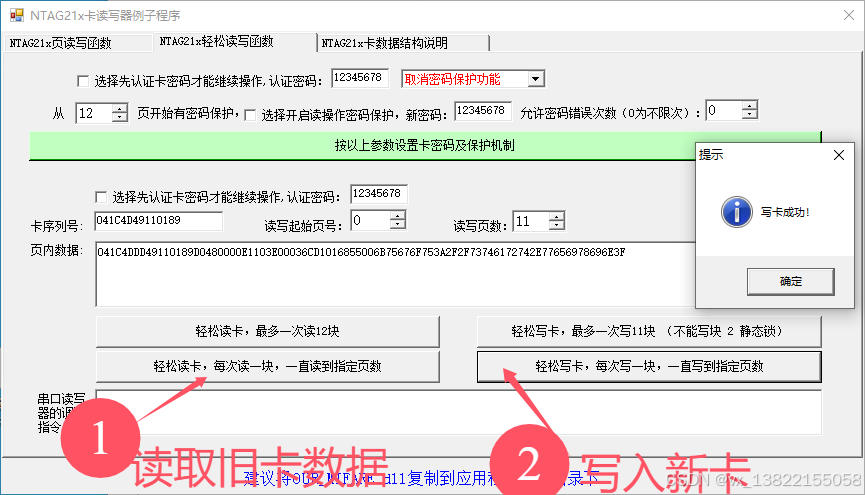
VB.net复制Ntag213卡写入UID
本示例使用的发卡器:https://item.taobao.com/item.htm?ftt&id615391857885 一、读取旧Ntag卡的UID和数据 Private Sub Button15_Click(sender As Object, e As EventArgs) Handles Button15.Click轻松读卡技术支持:网站:Dim i, j As IntegerDim cardidhex, …...

MongoDB学习和应用(高效的非关系型数据库)
一丶 MongoDB简介 对于社交类软件的功能,我们需要对它的功能特点进行分析: 数据量会随着用户数增大而增大读多写少价值较低非好友看不到其动态信息地理位置的查询… 针对以上特点进行分析各大存储工具: mysql:关系型数据库&am…...
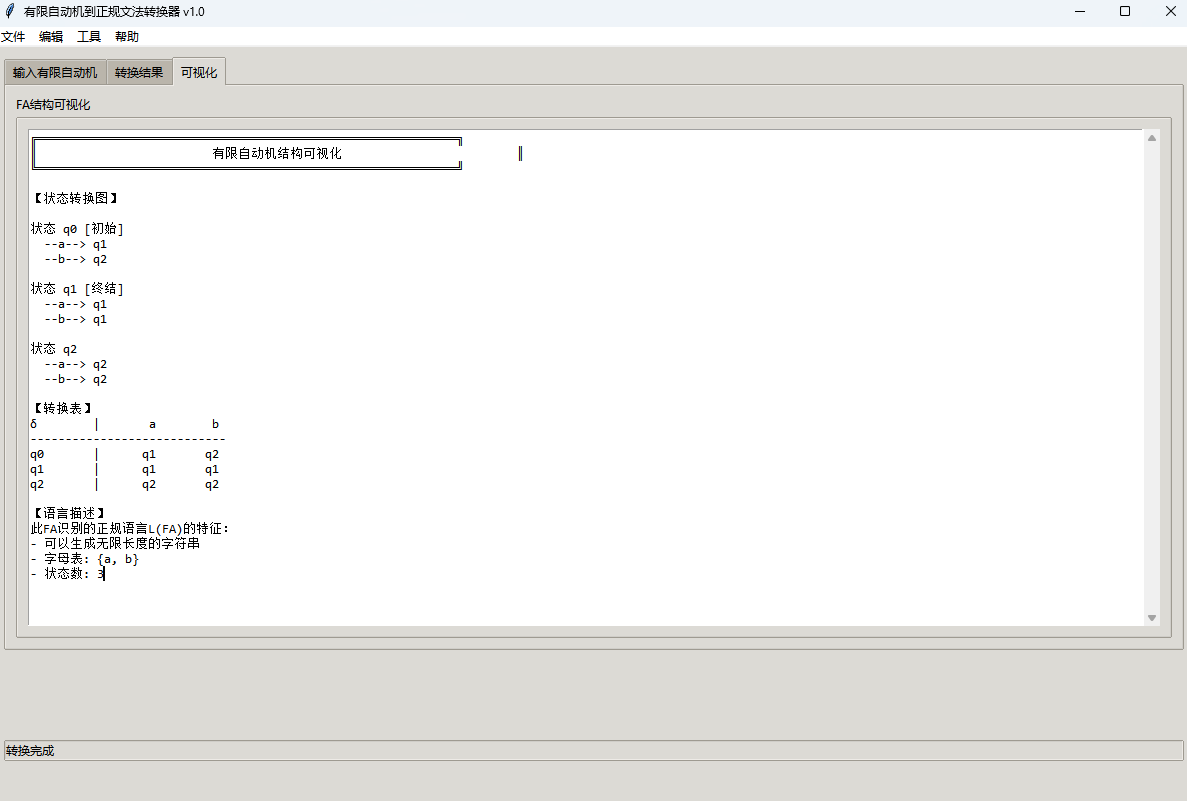
有限自动机到正规文法转换器v1.0
1 项目简介 这是一个功能强大的有限自动机(Finite Automaton, FA)到正规文法(Regular Grammar)转换器,它配备了一个直观且完整的图形用户界面,使用户能够轻松地进行操作和观察。该程序基于编译原理中的经典…...
)
Typeerror: cannot read properties of undefined (reading ‘XXX‘)
最近需要在离线机器上运行软件,所以得把软件用docker打包起来,大部分功能都没问题,出了一个奇怪的事情。同样的代码,在本机上用vscode可以运行起来,但是打包之后在docker里出现了问题。使用的是dialog组件,…...
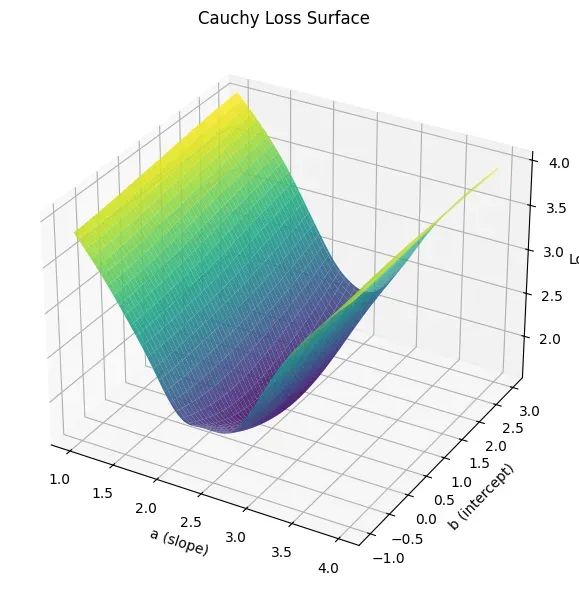
让回归模型不再被异常值“带跑偏“,MSE和Cauchy损失函数在噪声数据环境下的实战对比
在机器学习的回归分析中,损失函数的选择对模型性能具有决定性影响。均方误差(MSE)作为经典的损失函数,在处理干净数据时表现优异,但在面对包含异常值的噪声数据时,其对大误差的二次惩罚机制往往导致模型参数…...

【学习笔记】erase 删除顺序迭代器后迭代器失效的解决方案
目录 使用 erase 返回值继续迭代使用索引进行遍历 我们知道类似 vector 的顺序迭代器被删除后,迭代器会失效,因为顺序迭代器在内存中是连续存储的,元素删除后,后续元素会前移。 但一些场景中,我们又需要在执行删除操作…...
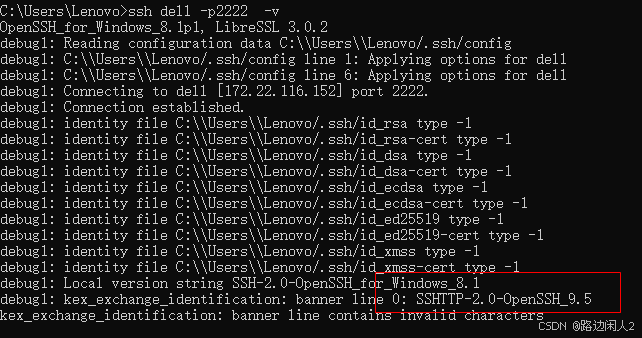
sshd代码修改banner
sshd服务连接之后会收到字符串: SSH-2.0-OpenSSH_9.5 容易被hacker识别此服务为sshd服务。 是否可以通过修改此banner达到让人无法识别此服务的目的呢? 不能。因为这是写的SSH的协议中的。 也就是协议规定了banner必须这么写。 SSH- 开头,…...

java高级——高阶函数、如何定义一个函数式接口类似stream流的filter
java高级——高阶函数、stream流 前情提要文章介绍一、函数伊始1.1 合格的函数1.2 有形的函数2. 函数对象2.1 函数对象——行为参数化2.2 函数对象——延迟执行 二、 函数编程语法1. 函数对象表现形式1.1 Lambda表达式1.2 方法引用(Math::max) 2 函数接口…...

Windows 下端口占用排查与释放全攻略
Windows 下端口占用排查与释放全攻略 在开发和运维过程中,经常会遇到端口被占用的问题(如 8080、3306 等常用端口)。本文将详细介绍如何通过命令行和图形化界面快速定位并释放被占用的端口,帮助你高效解决此类问题。 一、准…...