基础工程(cubeide串口调试,printf实现,延时函数)
0.基础工程(cubeide串口调试,printf实现,延时函数)
文章目录
- 0.基础工程(cubeide串口调试,printf实现,延时函数)
- 外部时钟源CLOCK(RCC)
- 系统时钟SYS与DEBUG设置
- UART串口设置
- cubeide设置
- 在main函数中打开串口中断接收
- 接收缓冲区定义
- 设置中断服务函数
- 设置串口接收中断回调函数
- 一些发送函数实现
- HAL库中串口接收与发送操作函数
- printf函数的重定义
- 注释syscalls.c中的_write函数
- 在usart.c中重新实现设个函数
- 延时函数
- sys_tick.c
- sys_tick.h
- 代码分析
外部时钟源CLOCK(RCC)
设置外部时钟源

High Speed Clock即为HSE(高速时钟源),一般为接外部晶振为主,因此选择Crystal/Ceramic Resonator(使用晶振/外部陶瓷振荡器)来使用外部晶振。
Low Speed Clock(低速时钟源),若无特殊需求,不用打开。
然后设置时钟频率

设置输入时钟源频率
此图片频率84为方便讲解设置,实际还是按使用频84MHZ来设置!
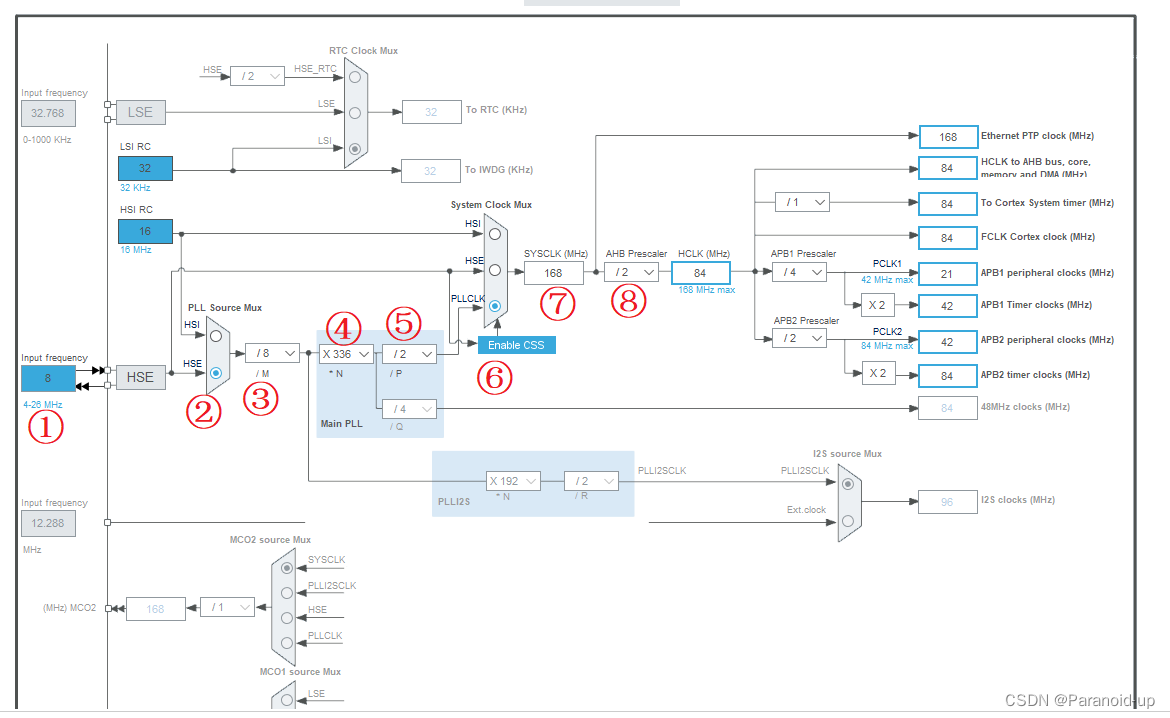
①:Input frequency:输入晶振频率,在这个选项中可根据单片机的外部晶振来填写晶振频率,下面的蓝色范围为可接受频率范围。这边按8MHZ来配。
②:PLL source Mux:PLL时钟源选择器,选择HSE高速时钟源即可。
③:PLL 分频系数 M 配置。由于我们需要系统时钟设为168MHZ,因此需要通过PLL分频来把8MHZ的晶振时钟转换为系统时钟。
④:主 PLL 倍频系数 N 配置。倍频系数 N(自动配频会自动计算)
⑤:主 PLL 分频系数 P 配置。分频系数 P(自动配频会自动计算)
⑥:系统时钟时钟源选择,选择PLLCLK,系统时钟就会和PLL同步为168MHZ
⑦,⑧:SYSCLK系统时钟,引脚的工作频率都由它分频来配置。
系统时钟分频得到的总线时钟:AHB(Advanced High performance Bus,高级高性能总线,用于高性能模块CPU、DMA、DSP之间的连接)、APB1、APB2、APB3和APB总线时钟(Advanced Peripheral Bus,高性能外围总线,用于低带宽的周边外设之间的连接,例如UART)以及Systick时钟的最终来源都是系统时钟SYSCLK。
系统时钟SYS与DEBUG设置


UART串口设置
cubeide设置
在“Mode”一栏中,将“Mode”改为“Asychoronous”异步模式,其他选项不用改动。
可以看到下方会出现串口的详细配置目录,这边选择不改动,使用默认的:
115200HZ波特率,8字符长度,奇偶位None,停止位为1.

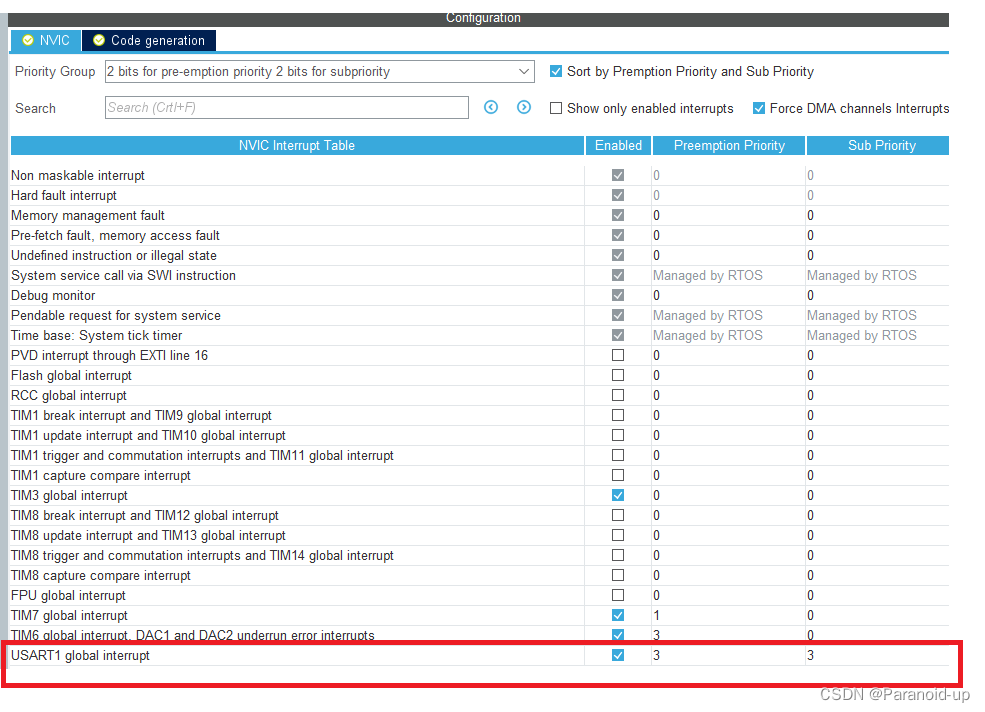
接着点击“NVIC Setting”对串口中断进行配置,打开USART1的中断开关。

并在“NVIC”总中断控制界面将串口中断的优先度设为“3,3”。
软件设置
在main函数中打开串口中断接收
HAL_UART_Receive_IT(&huart1, (uint8_t *)g_rx_buffer, 1); //打开串口中断接收
接收缓冲区定义
/* 串口1,调试串口 ------------------------------------------------------------*/
/* 接收缓冲, */
uint8_t g_usart_rx_buf[USART_REC_LEN]= {0};
uint8_t cp_g_usart_rx_buf[USART_REC_LEN]= {0};uint16_t g_usart_rx_sta = 0;uint8_t g_rx_buffer[RXBUFFERSIZE]; /* HAL库使用的串口接收缓冲 */
设置中断服务函数
void USART1_IRQHandler(void)
{/* USER CODE BEGIN USART1_IRQn 0 */uint32_t timeout = 0;uint32_t maxDelay = 0x1FFFF;protocol_data_recv(g_rx_buffer, 1);/* USER CODE END USART1_IRQn 0 */HAL_UART_IRQHandler(&huart1);/* USER CODE BEGIN USART1_IRQn 1 */timeout = 0;while (HAL_UART_GetState(&huart1) != HAL_UART_STATE_READY) /* 等待就绪 */{timeout++; /* 超时处理 */if(timeout > maxDelay){break;}}timeout=0;while (HAL_UART_Receive_IT(&huart1, (uint8_t *)g_rx_buffer, RXBUFFERSIZE) != HAL_OK){timeout++; /* 超时处理 */if (timeout > maxDelay){break;}}//__HAL_UART_ENABLE_IT(&huart1, UART_IT_RXNE);/* USER CODE END USART1_IRQn 1 */
}
设置串口接收中断回调函数
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{if(huart->Instance == USART1) /* 接收未完 */{if((g_usart_rx_sta & 0x8000) == 0) /* 接收到了0x0d */{if(g_usart_rx_sta & 0x4000) /* 接收到了0x0d */{if(g_rx_buffer[0] != 0x0a){g_usart_rx_sta = 0; /* 接收错误,重新 */}else{g_usart_rx_sta |= 0x8000; /* 接收完成 */}}else{ /* 还没收到0X0D */if(g_rx_buffer[0] == 0x0d){g_usart_rx_sta |= 0x4000;}else{cp_g_usart_rx_buf[g_usart_rx_sta & 0X3FFF] = g_rx_buffer[0] ;g_usart_rx_sta++;if(g_usart_rx_sta > (USART_REC_LEN - 1)){g_usart_rx_sta = 0; /* 接收数据错误,重新 */}}}}if (g_usart_rx_sta & 0x8000) {memcpy(g_usart_rx_buf, cp_g_usart_rx_buf, USART_REC_LEN);memset(cp_g_usart_rx_buf, 0, USART_REC_LEN);g_usart_rx_sta = 0;}}
}
串口接收到的数据将存放在g_usart_rx_buf中
一些发送函数实现
/***************** 串口1 **********************/
/***************** 发送字符 **********************/
void Usart_SendByte(uint8_t str)
{HAL_UART_Transmit(&huart1, &str, 1, 1000);}/***************** 发送字符串 **********************/
void Usart_SendString(uint8_t *str)
{unsigned int k=0;do{HAL_UART_Transmit(&huart1,(uint8_t *)(str + k) ,1,1000);k++;} while(*(str + k)!='\0');
}
HAL库中串口接收与发送操作函数
/* IO operation functions *******************************************************/
HAL_StatusTypeDef HAL_UART_Transmit(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout);
HAL_StatusTypeDef HAL_UART_Receive(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout);
HAL_StatusTypeDef HAL_UART_Transmit_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);
HAL_StatusTypeDef HAL_UART_Receive_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);
HAL_StatusTypeDef HAL_UART_Transmit_DMA(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);
HAL_StatusTypeDef HAL_UART_Receive_DMA(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);
HAL_StatusTypeDef HAL_UART_DMAPause(UART_HandleTypeDef *huart);
HAL_StatusTypeDef HAL_UART_DMAResume(UART_HandleTypeDef *huart);
HAL_StatusTypeDef HAL_UART_DMAStop(UART_HandleTypeDef *huart);
/* Transfer Abort functions */
HAL_StatusTypeDef HAL_UART_Abort(UART_HandleTypeDef *huart);
HAL_StatusTypeDef HAL_UART_AbortTransmit(UART_HandleTypeDef *huart);
HAL_StatusTypeDef HAL_UART_AbortReceive(UART_HandleTypeDef *huart);
HAL_StatusTypeDef HAL_UART_Abort_IT(UART_HandleTypeDef *huart);
HAL_StatusTypeDef HAL_UART_AbortTransmit_IT(UART_HandleTypeDef *huart);
HAL_StatusTypeDef HAL_UART_AbortReceive_IT(UART_HandleTypeDef *huart);void HAL_UART_IRQHandler(UART_HandleTypeDef *huart);
void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart);
void HAL_UART_TxHalfCpltCallback(UART_HandleTypeDef *huart);
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart);
void HAL_UART_RxHalfCpltCallback(UART_HandleTypeDef *huart);
void HAL_UART_ErrorCallback(UART_HandleTypeDef *huart);
void HAL_UART_AbortCpltCallback(UART_HandleTypeDef *huart);
void HAL_UART_AbortTransmitCpltCallback(UART_HandleTypeDef *huart);
void HAL_UART_AbortReceiveCpltCallback(UART_HandleTypeDef *huart);
这些函数是用于串行通信中的UART(通用异步收发器)操作的函数。
HAL_UART_Transmit: 用于通过UART发送数据。它接收UART句柄指针 huart,数据缓冲区指针 pData,数据长度 Size 和超时时间 Timeout。
HAL_UART_Receive: 用于通过UART接收数据。它接收UART句柄指针 huart,数据缓冲区指针 pData,数据长度 Size 和超时时间 Timeout。
HAL_UART_Transmit_IT: 用于以中断方式通过UART发送数据。与 HAL_UART_Transmit 类似,但不会阻塞主程序的执行。
HAL_UART_Receive_IT: 用于以中断方式通过UART接收数据。与 HAL_UART_Receive 类似,但不会阻塞主程序的执行。
HAL_UART_Transmit_DMA: 用于通过DMA(直接存储器访问)方式通过UART发送数据。这种方法可以实现高效的数据传输,减少CPU的负载。
HAL_UART_Receive_DMA: 用于通过DMA方式通过UART接收数据。与 HAL_UART_Transmit_DMA 类似,但用于接收数据。
HAL_UART_DMAPause: 暂停通过DMA方式传输数据。
HAL_UART_DMAResume: 恢复通过DMA方式传输数据。
HAL_UART_DMAStop: 停止通过DMA方式传输数据。
HAL_UART_Abort: 中止UART通信,停止传输并释放相关资源。
HAL_UART_AbortTransmit: 中止UART发送操作。
HAL_UART_AbortReceive: 中止UART接收操作。
HAL_UART_Abort_IT: 以中断方式中止UART通信。
HAL_UART_AbortTransmit_IT: 以中断方式中止UART发送操作。
HAL_UART_AbortReceive_IT: 以中断方式中止UART接收操作。
上述函数提供了灵活的UART数据传输和操作控制功能,适用于各种应用场景。通过这些函数,可以发送和接收数据,使用不同的传输方式(阻塞、中断、DMA),以及中止或暂停数据传输。此外,还提供了一些回调函数,以便在特定事件发生时进行处理,如传输完成、接收完成、错误处理等。
printf函数的重定义
注释syscalls.c中的_write函数
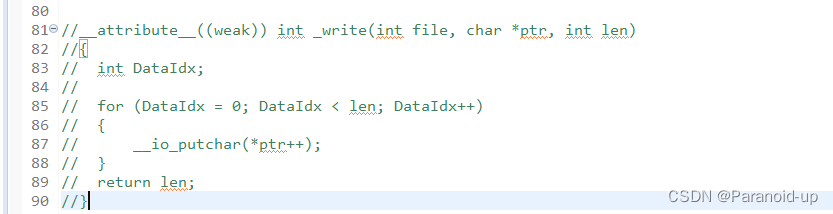
在usart.c中重新实现设个函数
__attribute__((weak)) int _write(int file, char *ptr, int len)
{if(HAL_UART_Transmit(&huart1,(uint8_t *)ptr,len,0xffff) != HAL_OK){Error_Handler();}return len;
}
延时函数
sys_tick.c
/** sys_tick.c** Created on: May 31, 2023* Author: 黎*/
#include "main.h"
#include "sys_tick.h"/*
Systick功能实现us延时,参数SYSCLK为系统时钟
*/
uint32_t fac_us;void HAL_Delay_us_init(uint16_t SYSCLK)
{fac_us=SYSCLK;
}void HAL_Delay_us(uint32_t nus)
{uint32_t ticks;uint32_t told,tnow,tcnt=0;uint32_t reload=SysTick->LOAD;ticks=nus*fac_us;told=SysTick->VAL;while(1){tnow=SysTick->VAL;if(tnow!=told){if(tnow<told)tcnt+=told-tnow;else tcnt+=reload-tnow+told;told=tnow;if(tcnt>=ticks)break;}};
}
void HAL_Delay_ms(uint32_t nus)
{uint32_t ticks;uint32_t told,tnow,tcnt=0;uint32_t reload=SysTick->LOAD;ticks=nus * fac_us * 1000;told=SysTick->VAL;while(1){tnow=SysTick->VAL;if(tnow!=told){if(tnow<told)tcnt+=told-tnow;else tcnt+=reload-tnow+told;told=tnow;if(tcnt>=ticks)break;}};
}
sys_tick.h
/** sys_tick.h** Created on: May 31, 2023* Author: 黎*/#ifndef SYS_TICK_H_
#define SYS_TICK_H_#include "main.h"#define delay_us HAL_Delay_us
#define delay_ms HAL_Delay_msvoid HAL_Delay_ms(uint32_t nus);
void HAL_Delay_us_init(uint16_t SYSCLK);
void HAL_Delay_us(uint32_t nus);
#endif /* SYS_TICK_H_ */
代码分析
上面的代码是一个用于延时的函数实现,使用了系统的SysTick定时器。
首先,代码定义了一个全局变量fac_us,用于存储每微秒的时钟周期数。
然后,代码包含了两个函数HAL_Delay_us_init和HAL_Delay_us,用于初始化和实现微秒级延时。
HAL_Delay_us_init函数用于初始化延时函数,接受一个参数SYSCLK,表示系统时钟频率。在函数中,将系统时钟频率赋值给fac_us变量。
HAL_Delay_us函数用于实现微秒级延时,接受一个参数nus,表示要延时的微秒数。在函数中,首先计算需要延时的时钟周期数ticks,然后通过循环进行延时。在每次循环中,获取当前的SysTick值,并判断是否发生了溢出。根据当前值和上一次的值计算经过的时钟周期数tcnt,如果经过的时钟周期数达到了目标延时的时钟周期数ticks,则结束延时。
此外,代码还包含了一个HAL_Delay_ms函数,用于实现毫秒级延时,原理与HAL_Delay_us函数类似,只是延时的单位是毫秒。
综上所述,这段代码通过使用SysTick定时器实现了微秒级和毫秒级的延时功能。
相关文章:
基础工程(cubeide串口调试,printf实现,延时函数)
0.基础工程(cubeide串口调试,printf实现,延时函数) 文章目录 0.基础工程(cubeide串口调试,printf实现,延时函数)外部时钟源CLOCK(RCC)系统时钟SYS与DEBUG设置UART串口设置cubeide设置…...

大厂设计师都在用的9个灵感工具
每一件伟大的设计作品都离不开设计师灵感的爆发。设计师有很多灵感来源,比如精美的摄影图片、酷炫的网站设计、APP的特色功能、友好的用户体验动画,或者一篇文章。 设计师每天都需要收集灵感,把灵感收集当成日常生活。在这篇文章中ÿ…...

安全实现SpringBoot配置文件自动加解密
需求背景 应用程序开发的时候,往往会存在一些敏感的配置属性 数据库账号、密码第三方服务账号密码内置加密密码其他的敏感配置 对于安全性要求比较高的公司,往往不允许敏感配置以明文的方式出现。 通常做法是对这些敏感配置进行加密,然后在…...
数据结构--队列2--双端队列--java双端队列
介绍 双端队列,和前面学的队列和栈的区别在于双端队列2端都可以进行增删,其他2个都是只能一端可以增/删。 实现 链表 因为2端都需要可以操作所以我们使用双向链表 我们也需要一共头节点 所以节点设置 static class Node<E>{E value;Node<E…...

网络安全:信息收集专总结【社会工程学】
前言 俗话说“渗透的本质也就是信息收集”,信息收集的深度,直接关系到渗透测试的成败,打好信息收集这一基础可以让测试者选择合适和准确的渗透测试攻击方式,缩短渗透测试的时间。 一、思维导图 二、GoogleHacking 1、介绍 利用…...

Linux 命令总结
基本操作 Linux关机,重启 # 关机 shutdown -h now# 重启 shutdown -r now 查看系统,CPU信息 # 查看系统内核信息 uname -a# 查看系统内核版本 cat /proc/version# 查看当前用户环境变量 envcat /proc/cpuinfo# 查看有几个逻辑cpu, 包括cpu型号 cat /proc/cpuinfo | grep na…...

使用腾讯手游助手作为开发测试模拟器的方案---以及部分问题的解决方案
此文主要介绍使用第三方模拟器(这里使用腾讯手游助手)作为开发工具,此模拟器分为两个引擎,一个与其他模拟器一样基于virtualbox的标准引擎,不过优化不太好,一个是他们主推的aow引擎,此引擎。关于aow没有太多的技术资料…...
牛客网论坛最具争议的Linux内核成神笔记,GitHub已下载量已过百万
原文地址:牛客网论坛最具争议的Linux内核成神笔记,GitHub已下载量已过百万 1、前言 Linux内核是一个操作系统(OS)内核,本质上定义为类Unix。它用于不同的操作系统,主要是以不同的Linux发行版的形式。Linu…...
)
docker如何容器迁移(实战)
手把手教你如何做容器迁移 第一步准备数据 假设要迁移一个 mysql 服务(docker部署),由于数据库过大(超过50 GB),用mysqldump备份和还原则太过耗时,下面尝试拷贝目录的方式来迁移,详…...

Android kotlin序列化之Parcelable详解与使用(二)
一、介绍 注解序列化篇:Android kotlin序列化之Parcelize详解与使用_蜗牛、Z的博客-CSDN博客 通过上一篇注解序列化,我们已了解的kotlin的序列化比Java复杂了很多。而且有好多问题,注解虽好,但是存在一些问题。 一般在大型商业…...
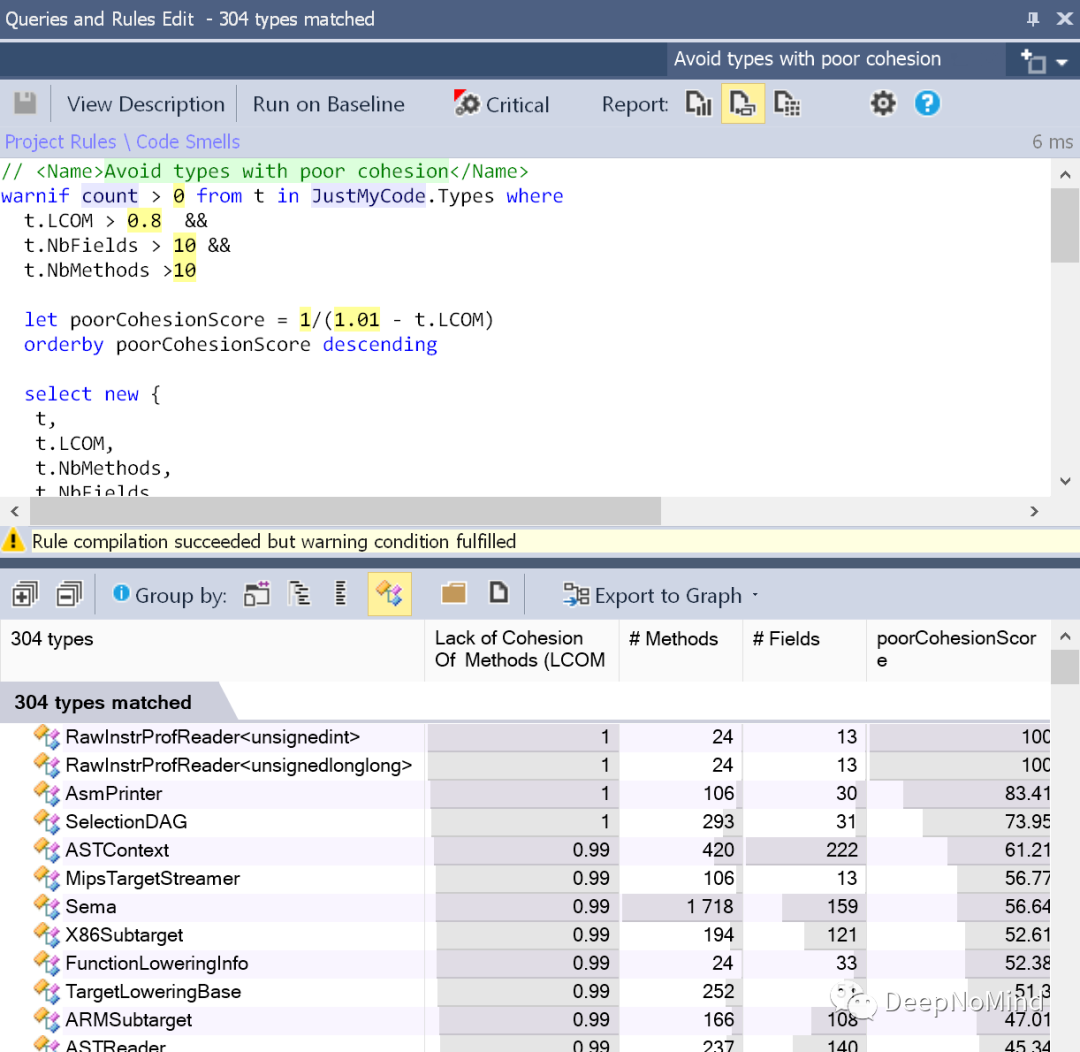
C++ 类设计的实践与理解
前言 C代码提供了足够的灵活性,因此对于大部分工程师来说都很难把握。本文介绍了写好C代码需要遵循的最佳实践方法,并在最后提供了一个工具可以帮助我们分析C代码的健壮度。 1. 尽可能尝试使用新的C标准 到2023年,C已经走过了40多个年头。新…...
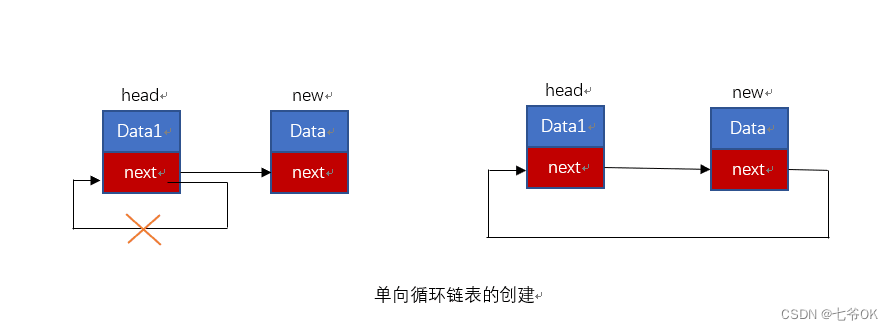
循环链表的创建
循环链表的介绍及创建(C语言代码实现) 点击打开在线编译器,边学边练 循环链表概念 对于单链表以及双向链表,其就像一个小巷,无论怎么样最终都能从一端走到另一端,然而循环链表则像一个有传送门的小巷&…...

如何让GPT的回答令人眼前一亮,不再刻板回复!
我们平常在使用GPT的时候,是否觉得它的回复太过于死板、官方化,特别是用于创作、写论文分析的时候,内容往往让读者提不起兴趣、没有吸引人的地方,甚至有些内容百度都可以搜到。 举个例子,如下图: 问GPT,AI…...
JMeter测试笔记(四):逻辑控制器
引言: 进行性能测试时,我们需要根据不同的情况来设置不同的执行流程,而逻辑控制器可以帮助我们实现这个目的。 在本文中,我们将深入了解JMeter中的逻辑控制器,包括简单控制器、循环控制器等,并学习如何正…...

【计算机组成原理·笔记】I/O接口
I/O接口 概述I/O接口的功能和组成 I/O接口的组成I/O接口的功能 I/O接口类型 按数据传送方式按功能灵活性按通用性按数据传输的控制方式 概述 I/O接口通常是指主机与I/O设备之间设置的硬件电路以及相应的软件控制,主机通过I/O接口和I/O设备相连接。 I/O接口的功…...

MIT6.024学习笔记(二)——图论(1)
学习不是为了竞争和战胜他人,而是为了更好地了解自己和世界。 - 达赖喇嘛 文章目录 图的相关概念涂色问题基础涂色方法(贪婪算法)证明 二分图匹配问题应用:稳定婚烟问题算法性质及其证明 图的相关概念 图的定义:一组&…...

饼状图使用属性时,使用驼峰命名法
饼状图是使用D3.js等JavaScript库来绘制的,而JavaScript中的属性名通常采用驼峰式命名法,即第一个单词的首字母小写,后面单词的首字母大写,例如fontSize、fontWeight等。而CSS中的属性名采用连字符命名法,即单词之间用…...

使用Spring Boot、Spring Security和Thymeleaf的整合示例
使用Spring Boot、Spring Security和Thymeleaf的整合示例 大纲: 创建Spring Boot项目 集成Thymeleaf作为模板引擎 配置Spring Security实现身份验证和授权 创建登录页面和主页 创建管理员页面和普通用户页面 实现用户角色和权限管理 详细步骤: 创建Sprin…...
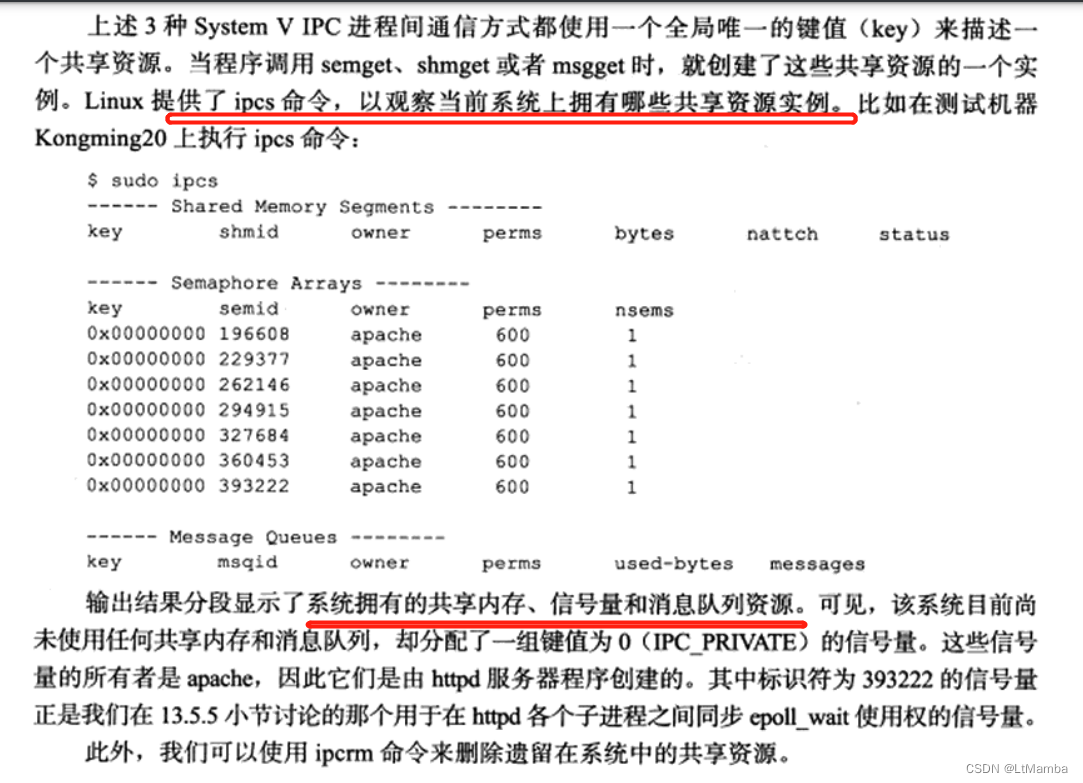
Linux--ServerProgramming--(7)IPC
1.管道 2.信号量 2.1 概念 信号量 是一个计数器,用于实现进程间互斥和同步。 信号量的取值可以是任何自然数。 最简单的信号量是只能取 0 和 1 的变量,这也是信号量最常见的一种形式,叫做二进制信号量(Binary Semaphore&#…...
最优化理论-KKT定理的推导与实现
目录 一、引言 二、最优化问题的基本概念 三、KKT条件的引入 1. 梯度条件 2. 原始可行性条件 3. 对偶可行性条件 四、KKT定理的表述 五、KKT定理的证明 1. 构造拉格朗日函数 2. 构造拉格朗日对偶函数 3. 推导KKT条件 4. 解释KKT条件 六、KKT定理的应用 七、总结 …...

阿里开源CosyVoice2-0.5B:快速部署声音克隆应用,小白友好教程
阿里开源CosyVoice2-0.5B:快速部署声音克隆应用,小白友好教程 1. 项目简介与核心能力 CosyVoice2-0.5B是阿里开源的一款轻量级语音克隆工具,专为快速部署和简单使用而设计。这个模型最吸引人的特点是: 3秒极速复刻:…...

Lingbot-Depth-Pretrain-ViTL-14 实战:Python爬虫获取图像数据并生成深度图
Lingbot-Depth-Pretrain-ViTL-14 实战:Python爬虫获取图像数据并生成深度图 你是不是也遇到过这样的场景:手头有一个很棒的深度估计模型,比如 Lingbot-Depth-Pretrain-ViTL-14,想用它来为自己的项目生成深度图,却发现…...

RSA1 - Writeup by AI
RSA1 - Writeup by AI 1. 题目描述项目内容题目来源Bugku题目类型Crypto (密码学)考点RSA 大数分解、私钥计算题目信息 题目给出了 RSA 加密的三个参数: e 65537 N 1018261336751023520497560395829454421245429586704872293236600679847605951423419167478189648…...

PDF文本高效提取:用pdftotext实现秒级文档内容解析
PDF文本高效提取:用pdftotext实现秒级文档内容解析 【免费下载链接】pdftotext Simple PDF text extraction 项目地址: https://gitcode.com/gh_mirrors/pd/pdftotext 破解PDF提取痛点:为什么你需要专业工具? 每天面对数十份PDF文档却…...

3个强力功能解决微信聊天记录永久保存难题的完整指南
3个强力功能解决微信聊天记录永久保存难题的完整指南 【免费下载链接】WeChatMsg 提取微信聊天记录,将其导出成HTML、Word、CSV文档永久保存,对聊天记录进行分析生成年度聊天报告 项目地址: https://gitcode.com/GitHub_Trending/we/WeChatMsg 你…...

终极指南:ComfyUI-LTXVideo深度解析与高效视频生成实战
终极指南:ComfyUI-LTXVideo深度解析与高效视频生成实战 【免费下载链接】ComfyUI-LTXVideo LTX-Video Support for ComfyUI 项目地址: https://gitcode.com/GitHub_Trending/co/ComfyUI-LTXVideo ComfyUI-LTXVideo 是专为LTX-2视频生成模型设计的强大ComfyUI…...
)
微信小程序蓝牙打印中文乱码?手把手教你GBK编码转换(附完整Demo)
微信小程序蓝牙打印中文乱码终极解决方案:从编码原理到完整实现 蓝牙打印机在零售、餐饮等行业的应用越来越广泛,而微信小程序作为轻量级应用平台,与蓝牙打印机的结合为商家提供了便捷的移动打印方案。但在实际开发中,开发者经常会…...

OCRmyPDF:让扫描PDF焕发新生的开源解决方案
OCRmyPDF:让扫描PDF焕发新生的开源解决方案 【免费下载链接】OCRmyPDF OCRmyPDF adds an OCR text layer to scanned PDF files, allowing them to be searched 项目地址: https://gitcode.com/GitHub_Trending/oc/OCRmyPDF 在数字化办公的浪潮中,…...
)
Unity开发HoloLens应用:从打包到安装的完整避坑指南(2024最新版)
Unity开发HoloLens应用:从打包到安装的完整避坑指南(2024最新版) 如果你正在尝试将Unity项目部署到HoloLens设备上,可能会遇到各种意想不到的问题。作为一位经历过无数次打包、部署、调试循环的开发者,我想分享一些实战…...

告别电台收听难题:foobox-cn网络电台收听方案
告别电台收听难题:foobox-cn网络电台收听方案 【免费下载链接】foobox-cn DUI 配置 for foobar2000 项目地址: https://gitcode.com/GitHub_Trending/fo/foobox-cn foobox-cn作为foobar2000的DUI皮肤(桌面用户界面定制方案)࿰…...