python-opencv对极几何 StereoRectify
OpenCV如何正确使用stereoRectify函数
函数介绍
用于双目相机的立体校正环节中,这里只谈谈这个函数怎么使用,参数具体指哪些
函数参数
随便去网上一搜或者看官方手册就能得到参数信息,但是!!相对关系非常容易出错!!这里详细解释一下这些参数究竟怎么用
void stereoRectify(InputArray cameraMatrix1, InputArray distCoeffs1, InputArray cameraMatrix2,InputArray distCoeffs2, Size imageSize, InputArray R, InputArray T,OutputArray R1, OutputArray R2, OutputArray P1, OutputArray P2, OutputArray Q, int flags=CALIB_ZERO_DISPARITY, double alpha=-1, Size newImageSize=Size(), Rect* validPixROI1=0, Rect* validPixROI2=0 )
cameraMatrix1-第一个摄像机的摄像机矩阵,即左相机相机内参矩阵,矩阵第三行格式应该为 0 0 1
distCoeffs1-第一个摄像机的畸变向量
cameraMatrix2-第一个摄像机的摄像机矩阵,即右相机相机内参矩阵,矩阵第三行格式应该为 0 0 1
distCoeffs2-第二个摄像机的畸变向量
imageSize-图像大小
R- 相机之间的旋转矩阵,这里R的意义是:相机1通过变换R到达相机2的位姿
T- 左相机到右相机的平移矩阵
R1-输出矩阵,第一个摄像机的校正变换矩阵(旋转变换)
R2-输出矩阵,第二个摄像机的校正变换矩阵(旋转矩阵)
P1-输出矩阵,第一个摄像机在新坐标系下的投影矩阵
P2-输出矩阵,第二个摄像机在想坐标系下的投影矩阵
Q-4*4的深度差异映射矩阵
flags-可选的标志有两种零或者 CV_CALIB_ZERO_DISPARITY ,如果设置 CV_CALIB_ZERO_DISPARITY 的话,该函数会让两幅校正后的图像的主点有相同的像素坐标。否则该函数会水平或垂直的移动图像,以使得其有用的范围最大
alpha-拉伸参数。如果设置为负或忽略,将不进行拉伸。如果设置为0,那么校正后图像只有有效的部分会被显示(没有黑色的部分),如果设置为1,那么就会显示整个图像。设置为0~1之间的某个值,其效果也居于两者之间。
newImageSize-校正后的图像分辨率,默认为原分辨率大小。
validPixROI1-可选的输出参数,Rect型数据。其内部的所有像素都有效
validPixROI2-可选的输出参数,Rect型数据。其内部的所有像素都有效
opencv进行双目标定以及极线校正 python代码
双目标定
参考博客 OpenCV相机标定全过程
[OpenCV实战]38 基于OpenCV的相机标定
opencv立体标定函数 stereoCalibrate()
主要使用的函数
findChessboardCorners() #棋盘格角点检测
cornerSubPix() #亚像素检测
calibrateCamera() #单目标定 求解摄像机的内在参数和外在参数
stereoCalibrate() #双目标定 求解两个摄像头的内外参数矩阵,以及两个摄像头的位置关系R,T
代码
import cv2
import os
import numpy as npleftpath = 'images/left'
rightpath = 'images/right'
CHECKERBOARD = (11,12) #棋盘格内角点数
square_size = (30,30) #棋盘格大小,单位mm
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)
imgpoints_l = [] #存放左图像坐标系下角点位置
imgpoints_r = [] #存放左图像坐标系下角点位置
objpoints = [] #存放世界坐标系下角点位置
objp = np.zeros((1, CHECKERBOARD[0]*CHECKERBOARD[1], 3), np.float32)
objp[0,:,:2] = np.mgrid[0:CHECKERBOARD[0], 0:CHECKERBOARD[1]].T.reshape(-1, 2)
objp[0,:,0] *= square_size[0]
objp[0,:,1] *= square_size[1]for ii in os.listdir(leftpath):img_l = cv2.imread(os.path.join(leftpath,ii))gray_l = cv2.cvtColor(img_l,cv2.COLOR_BGR2GRAY)img_r = cv2.imread(os.path.join(rightpath,ii))gray_r = cv2.cvtColor(img_r,cv2.COLOR_BGR2GRAY)ret_l, corners_l = cv2.findChessboardCorners(gray_l, CHECKERBOARD) #检测棋盘格内角点ret_r, corners_r = cv2.findChessboardCorners(gray_r, CHECKERBOARD)if ret_l and ret_r:objpoints.append(objp)corners2_l = cv2.cornerSubPix(gray_l,corners_l,(11,11),(-1,-1),criteria) imgpoints_l.append(corners2_l)corners2_r = cv2.cornerSubPix(gray_r,corners_r,(11,11),(-1,-1),criteria)imgpoints_r.append(corners2_r)#img = cv2.drawChessboardCorners(img, CHECKERBOARD, corners2,ret)#cv2.imwrite('./ChessboardCornersimg.jpg', img)
ret, mtx_l, dist_l, rvecs_l, tvecs_l = cv2.calibrateCamera(objpoints, imgpoints_l, gray_l.shape[::-1],None,None) #先分别做单目标定
ret, mtx_r, dist_r, rvecs_r, tvecs_r = cv2.calibrateCamera(objpoints, imgpoints_r, gray_r.shape[::-1],None,None)retval, cameraMatrix1, distCoeffs1, cameraMatrix2, distCoeffs2, R, T, E, F = \cv2.stereoCalibrate(objpoints, imgpoints_l, imgpoints_r, mtx_l, dist_l, mtx_r, dist_r, gray_l.shape[::-1]) #再做双目标定print("stereoCalibrate : \n")
print("Camera matrix left : \n")
print(cameraMatrix1)
print("distCoeffs left : \n")
print(distCoeffs1)
print("cameraMatrix left : \n")
print(cameraMatrix2)
print("distCoeffs left : \n")
print(distCoeffs2)
print("R : \n")
print(R)
print("T : \n")
print(T)
print("E : \n")
print(E)
print("F : \n")
print(F)将打印的结果保存到标定文件中即可
极线校正
参考博客 机器视觉学习笔记(8)——基于OpenCV的Bouguet立体校正
小白视角之Bouguet双目立体校正原理
主要使用的函数
stereoRectify() #计算旋转矩阵和投影矩阵
initUndistortRectifyMap() #计算校正查找映射表
remap() #重映射代码
import cv2
import numpy as npdef cat2images(limg, rimg):HEIGHT = limg.shape[0]WIDTH = limg.shape[1]imgcat = np.zeros((HEIGHT, WIDTH*2+20,3))imgcat[:,:WIDTH,:] = limgimgcat[:,-WIDTH:,:] = rimgfor i in range(int(HEIGHT / 32)):imgcat[i*32,:,:] = 255 return imgcatleft_image = cv2.imread("images/left/268.jpg")
right_image = cv2.imread("images/right/268.jpg")imgcat_source = cat2images(left_image,right_image)
HEIGHT = left_image.shape[0]
WIDTH = left_image.shape[1]
cv2.imwrite('imgcat_source.jpg', imgcat_source )camera_matrix0 = np.array([[1.30991855e+03, 0.00000000e+00, 5.90463086e+02],[0.00000000e+00, 1.31136722e+03, 3.33464608e+02],[0.00000000e+00, 0.00000000e+00, 1.00000000e+00]]) .reshape((3,3)) #即上文标定得到的 cameraMatrix1distortion0 = np.array([-4.88890701e-01, 3.27964225e-01, -2.72130825e-04, 1.28030208e-03, -1.85964828e-01]) #即上文标定得到的 distCoeffs1camera_matrix1 = np.array([[1.30057467e+03, 0.00000000e+00, 6.28445749e+02],[0.00000000e+00, 1.30026325e+03, 3.90475091e+02],[0.00000000e+00, 0.00000000e+00, 1.00000000e+00]]) .reshape((3,3)) #即上文标定得到的 cameraMatrix2
distortion1 = np.array([-4.95938411e-01, 2.70207629e-01, 1.81014753e-04, -4.58891345e-04, 4.41327829e-01]) #即上文标定得到的 distCoeffs2R = np.array([[ 0.99989348, 0.01340678, -0.00576869], [-0.01338004, 0.99989967, 0.00465071], [ 0.00583046, -0.00457303, 0.99997255]]) #即上文标定得到的 R
T = np.array([-244.28272039, 3.84124178, 2.0963191]) #即上文标定得到的T(R_l, R_r, P_l, P_r, Q, validPixROI1, validPixROI2) = \cv2.stereoRectify(camera_matrix0, distortion0, camera_matrix1, distortion1, np.array([WIDTH,HEIGHT]), R, T) #计算旋转矩阵和投影矩阵(map1, map2) = \cv2.initUndistortRectifyMap(camera_matrix0, distortion0, R_l, P_l, np.array([WIDTH,HEIGHT]), cv2.CV_32FC1) #计算校正查找映射表rect_left_image = cv2.remap(left_image, map1, map2, cv2.INTER_CUBIC) #重映射#左右图需要分别计算校正查找映射表以及重映射
(map1, map2) = \cv2.initUndistortRectifyMap(camera_matrix1, distortion1, R_r, P_r, np.array([WIDTH,HEIGHT]), cv2.CV_32FC1)rect_right_image = cv2.remap(right_image, map1, map2, cv2.INTER_CUBIC)imgcat_out = cat2images(rect_left_image,rect_right_image)
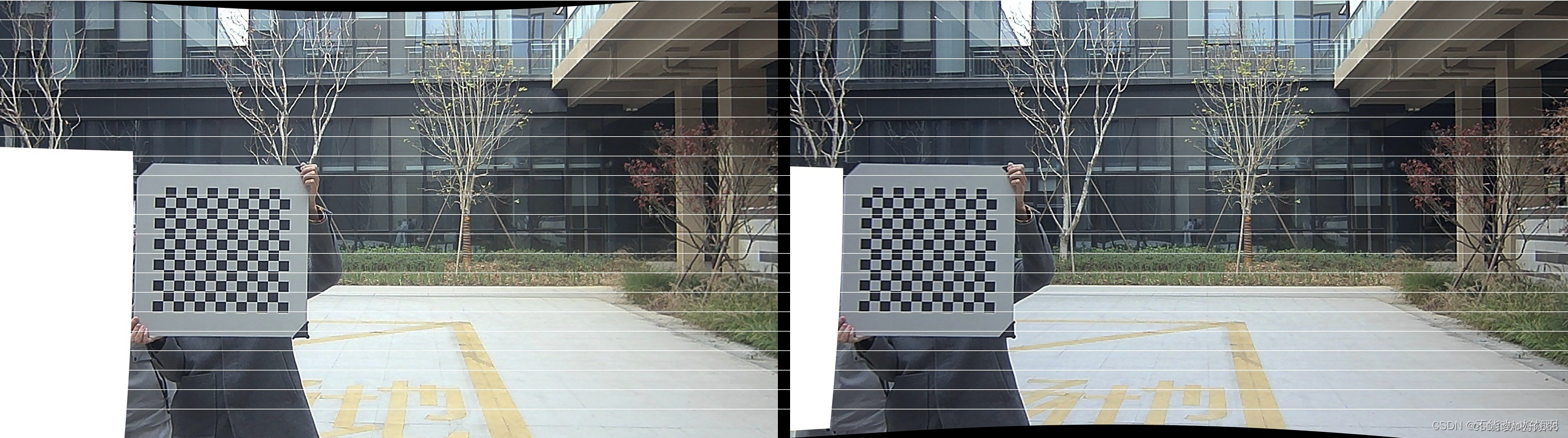
cv2.imwrite('imgcat_out.jpg', imgcat_out)效果图
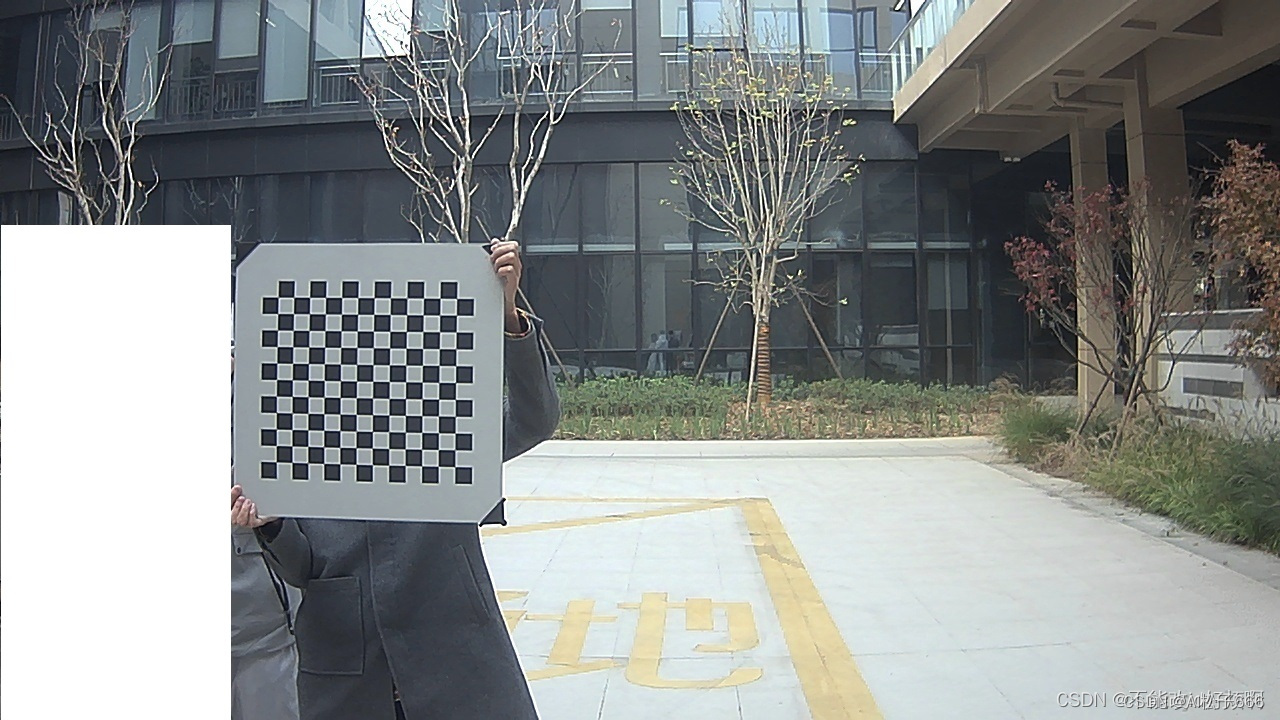
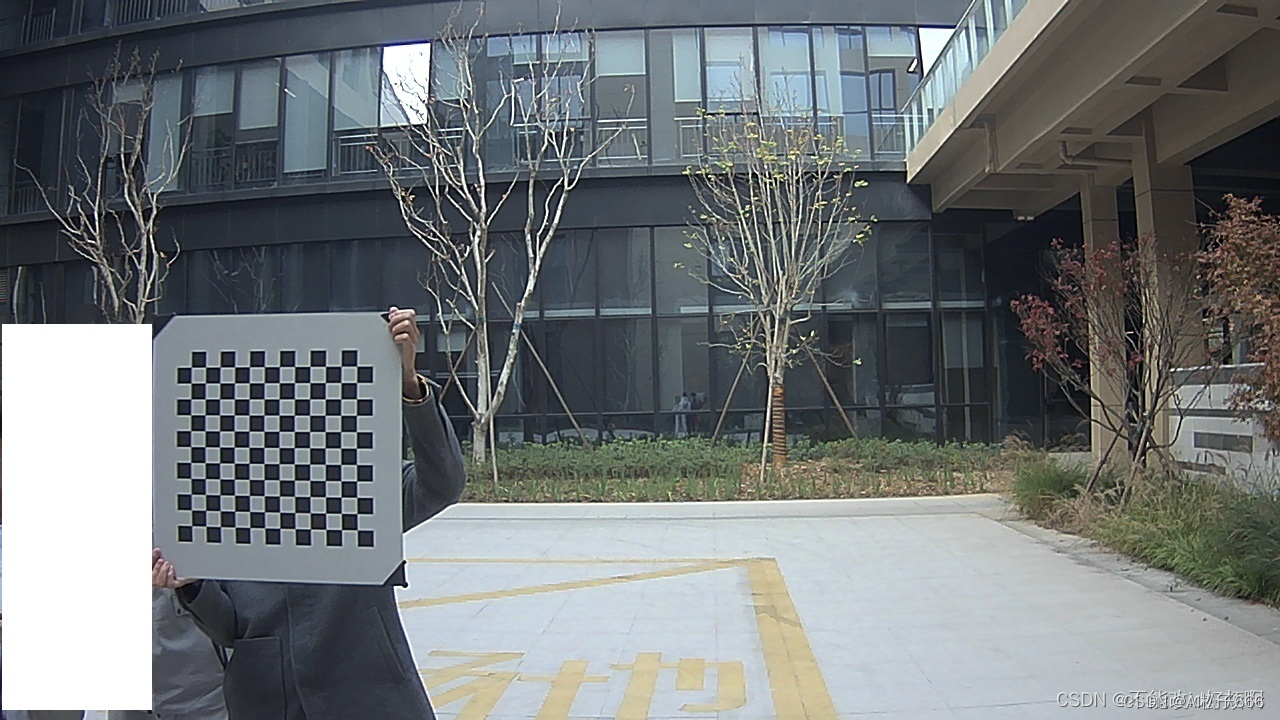
校正前
左图
右图
校正后
相关文章:
python-opencv对极几何 StereoRectify
OpenCV如何正确使用stereoRectify函数 函数介绍 用于双目相机的立体校正环节中,这里只谈谈这个函数怎么使用,参数具体指哪些函数参数 随便去网上一搜或者看官方手册就能得到参数信息,但是!!相对关系非常容易出错&…...
pom文件---maven
027-Maven 命令行-实验四-生成 Web 工程-执行生成_ev_哔哩哔哩_bilibili 27节.后续补充 一.maven下载安装及配置 1)maven下载 2) settings文件配置本地仓库 3)settings配置远程仓库地址 4)配置maven工程的基础JDK版本 5)确认JDK环境变量配置没问题,配置maven的环境变量 验证…...

界面控件DevExpress.Drawing图形库早期增强功能分享
众所周知,DevExpress在v22.2发布周期中引入了全新的DevExpress.Drawing图形库(并且已经在随后的小更新中引入了一系列增强功能)。 在这篇博文中,我们将总结在DevExpress v23.1中解决的一些问题,以及在EAP构建中为以下…...
Semantic Kernel 入门系列:Connector连接器
当我们使用Native Function的时候,除了处理一些基本的逻辑操作之外,更多的还是需要进行外部数据源和服务的对接,要么是获取相关的数据,要么是保存输出结果。这一过程在Semantic Kernel中可以被归类为Connector。 Connector更像是…...

Maven介绍-下载-安装-使用-基础知识
Maven介绍-下载-安装-使用-基础知识 Maven的进阶高级用法可查看这篇文章: Maven分模块-继承-聚合-私服的高级用法 文章目录 Maven介绍-下载-安装-使用-基础知识01. Maven1.1 初识Maven1.1.1 什么是Maven1.1.2 Maven的作用 02. Maven概述2.1 Maven介绍2.2 Maven模型…...
Ansible环境搭建,CentOS 系列操作系统搭建Ansible集群环境
Ansible是一种自动化工具,基于Python写的,原理什么的就不过多再说了,详情参考:https://www.itwk.cc/post/403.html https://blog.csdn.net/qq_34185638/article/details/131079320?spm1001.2014.3001.5502 环境准备 HOSTNAMEIP…...
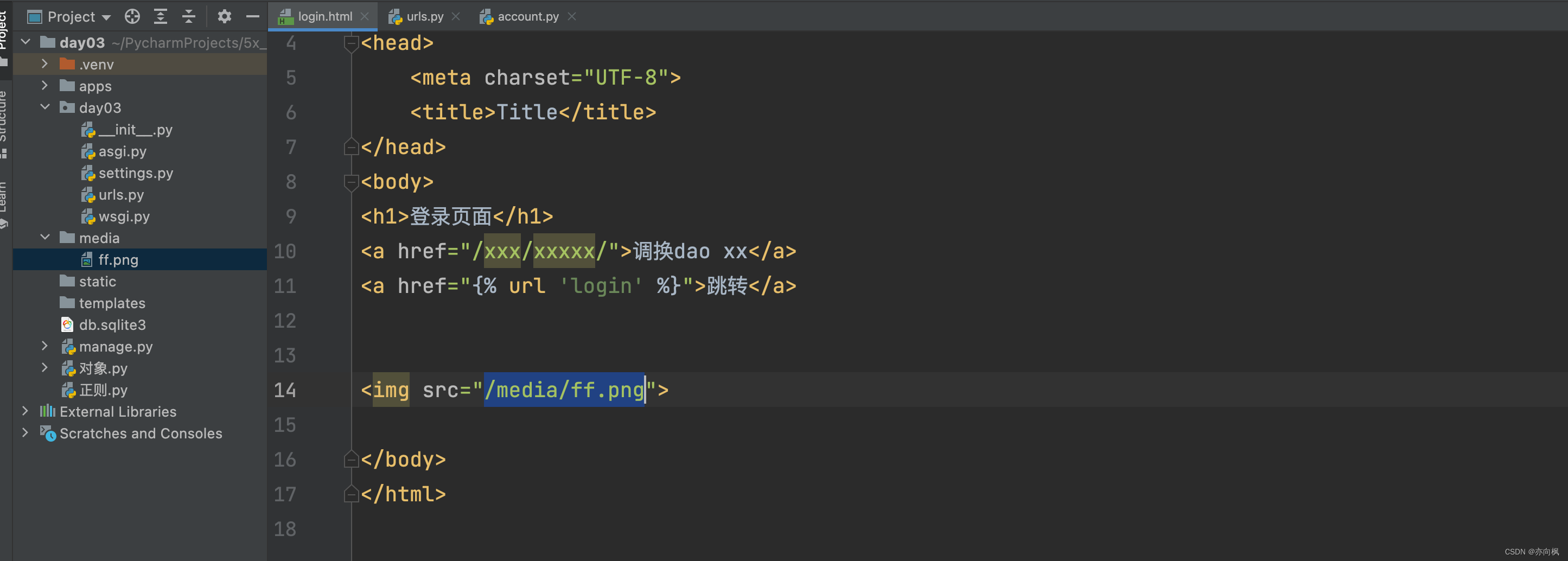
Django基础
1.Django基础 路由系统视图模板静态文件和媒体文件中间件ORM(时间) 2.路由系统 本质上:URL和函数的对应关系。 2.1 传统的路由 from django.contrib import admin from django.urls import path from apps.web import viewsurlpatterns …...

HTML,url,unicode编码
目录标题 HTML实体编码urlcode编码unicode编码小结基础例题高级例题 HTML实体编码 实体表示: 以&符号开始,后面跟着一个预定义的实体的名称,或是一个#符号以及字符的十进制数字。 例: <p>hello</p> <!-- 等同…...
)
Hbase-热点问题(数据存储倾斜问题)
1. 危害 某一台regionserver消耗过多,承受过多的并发量,时间长机器性能下降,甚至宕机 2. 解决 可以通过设计rowkey预分区的方法解决 比如可以预分区120个,1月的数据存到1-10分区,每个月的数据存到10个分区ÿ…...

一个基于Java线程池管理的开源框架Hippo4j实践
线程池痛点 线程池是一种基于池化思想管理线程的工具,使用线程池可以减少创建销毁线程的开销,避免线程过多导致系统资源耗尽。在高并发以及大批量的任务处理场景,线程池的使用是必不可少的。线程池常见痛点: 线程池随便定义&…...

源码解析Flink源节点数据读取是如何与checkpoint串行执行
文章目录 源码解析Flink源节点数据读取是如何与checkpoint串行执行Checkpoint阶段StreamTask类变量actionExecutor的实现和初始化小结 数据读取阶段小结 总结 源码解析Flink源节点数据读取是如何与checkpoint串行执行 Flink版本:1.13.6 前置知识:源节点…...
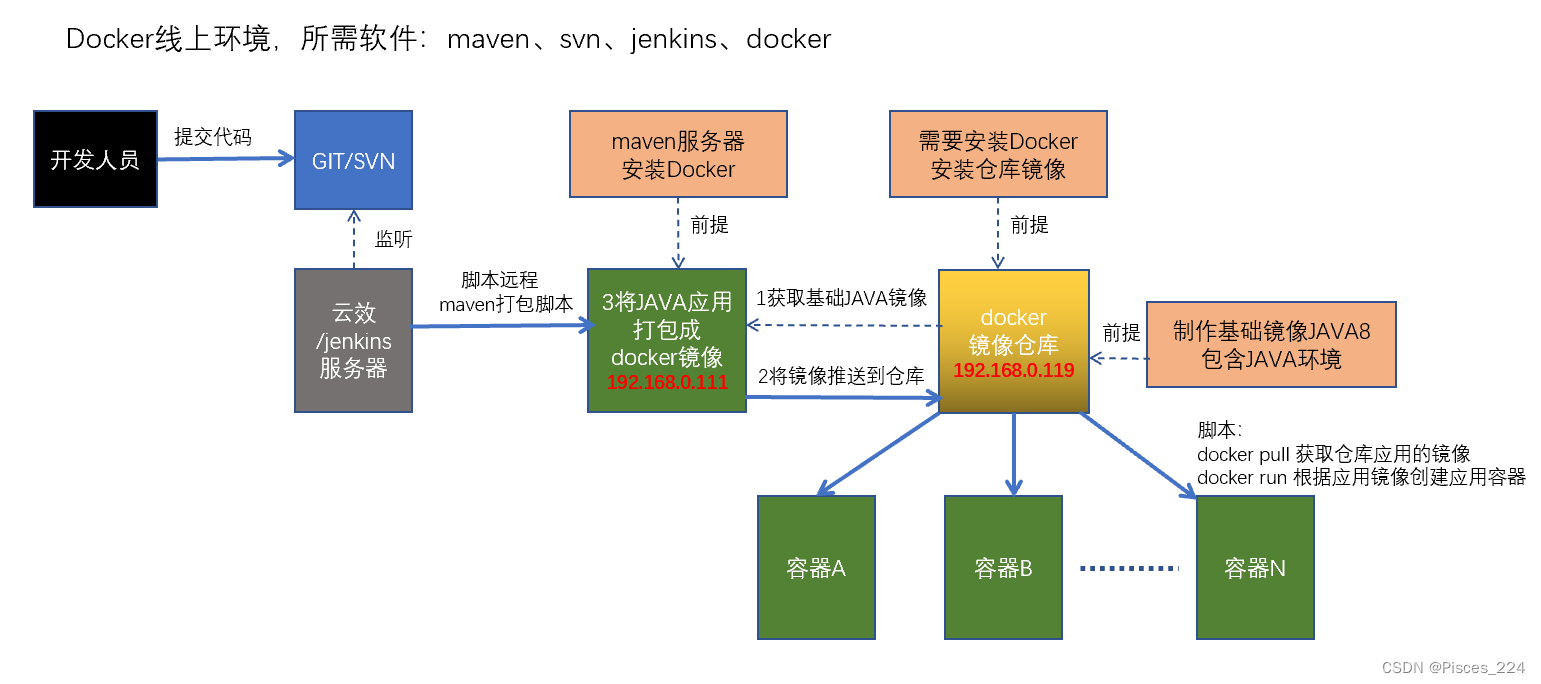
进阶:Docker容器管理工具——Docker-Compose使用
文章目录 前言Compose大杀器编排服务 1、docker-compose安装curl方式安装增加可执行权限查看版本 2、Docker-compose.yaml命令3、 docker-compose实战4、Docker网络路由docker的跨主机网络路由**问题由来**:方案两台机分别配置路由表ip_forward配置 总结 前言 容器的管理工具&…...
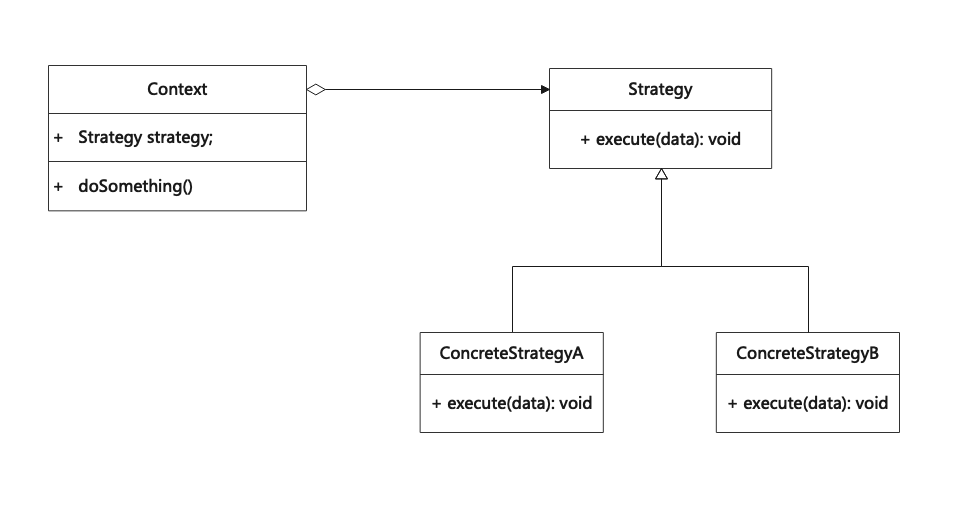
策略模式(Strategy)
策略模式是一种行为设计模式,就是定义一系列算法,然后将每一个算法封装起来,并使它们可相互替换。本模式通过定义一组可相互替换的算法,实现将算法独立于使用它的用户而变化。 Strategy is a behavioral design pattern that def…...
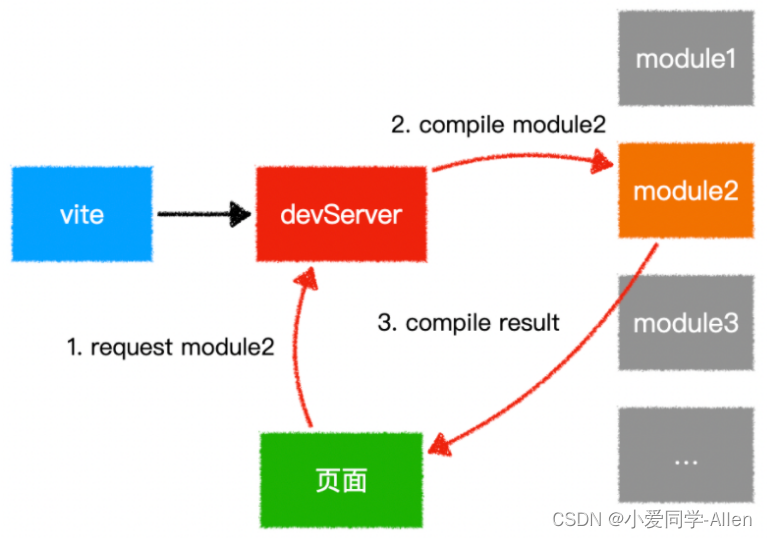
webpack基础知识十:与webpack类似的工具还有哪些?区别?
一、模块化工具 模块化是一种处理复杂系统分解为更好的可管理模块的方式 可以用来分割,组织和打包应用。每个模块完成一个特定的子功能,所有的模块按某种方法组装起来,成为一个整体(bundle) 在前端领域中,并非只有webpack这一款…...
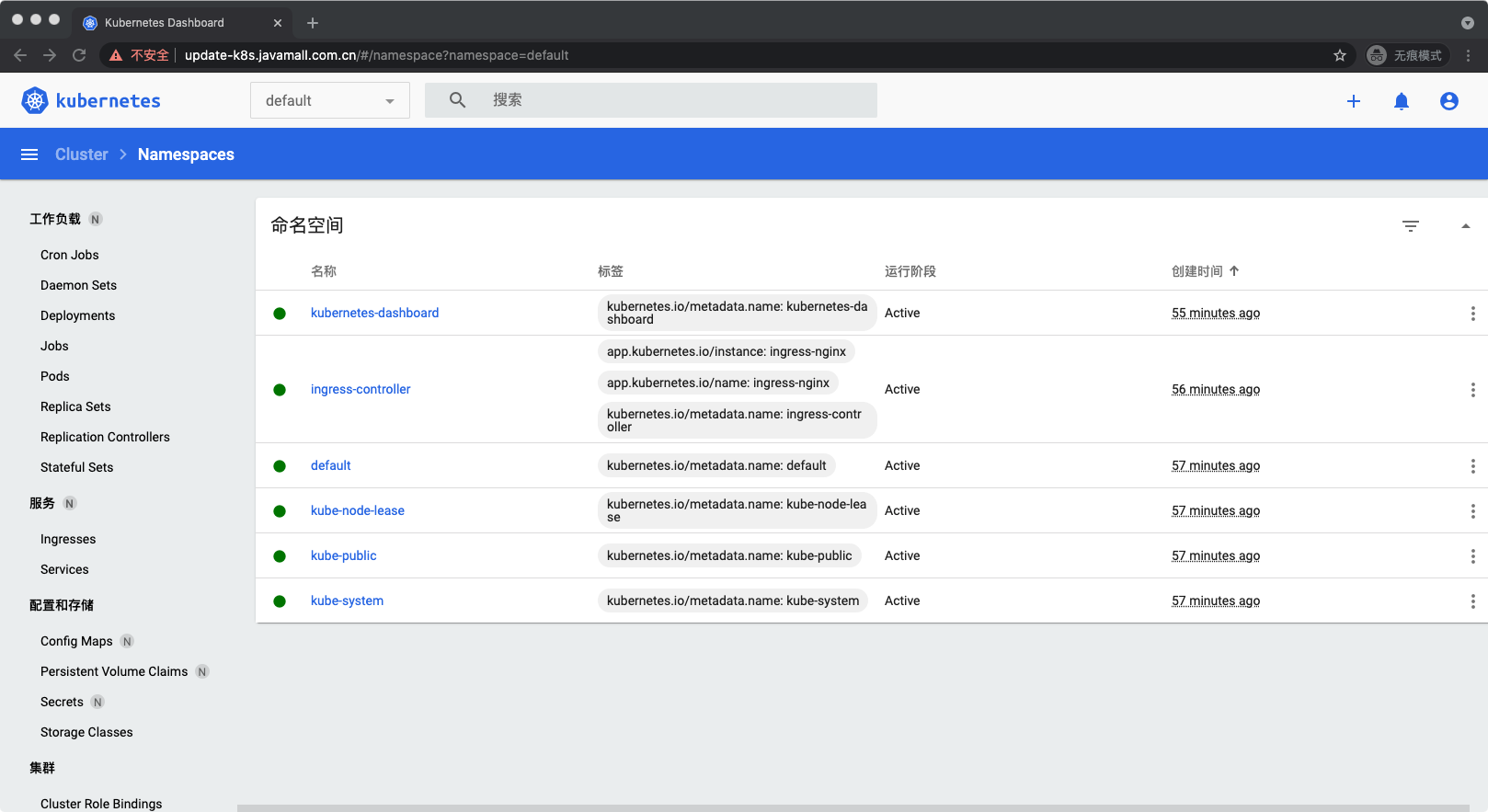
分享kubernetes部署:基于Ansible自动安装kubernetes
基于Ansible自动安装kubernetes 环境准备 我们以如下机器环境为例: 开放端口: 控制平面节点 工作节点 请按如上中规定的开放端口,或关闭防火墙: systemctlstopfirewalld&&\ systemctldisablefirewalld 安装常用工具 sudo…...

【Kubernetes部署篇】基于Ubuntu20.04操作系统搭建K8S1.23版本集群
文章目录 一、集群架构规划信息二、系统初始化准备(所有节点同步操作)三、安装kubeadm(所有节点同步操作)四、初始化K8S集群(master节点操作)五、添加Node节点到K8S集群中六、安装Calico网络插件七、测试CoreDNS可用性 一、集群架构规划信息 pod网段:10.244.0.0/16…...
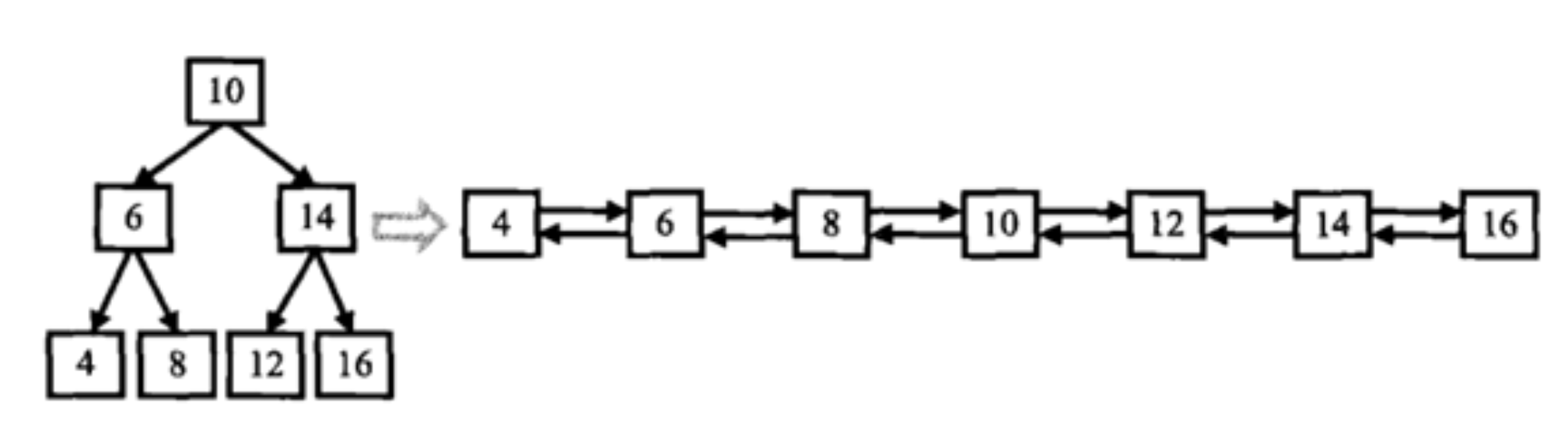
c++--二叉树应用
1.根据二叉树创建字符串 力扣 给你二叉树的根节点 root ,请你采用前序遍历的方式,将二叉树转化为一个由括号和整数组成的字符串,返回构造出的字符串。 空节点使用一对空括号对 "()" 表示,转化后需要省略所有不影响字符…...

以太网DHCP协议(十)
目录 一、工作原理 二、DHCP报文 2.1 DHCP报文类型 2.2 DHCP报文格式 当网络内部的主机设备数量过多是,IP地址的手动设置是一件非常繁琐的事情。为了实现自动设置IP地址、统一管理IP地址分配,TCPIP协议栈中引入了DHCP协议。 一、工作原理 使用DHCP之…...

企业服务器器中了360后缀勒索病毒怎么解决,勒索病毒解密数据恢复
随着网络威胁的增加,企业服务器成为黑客攻击的目标之一。近期,上海某知名律师事务所的数据库遭到了360后缀的勒索病毒攻击,导致企业服务器内的数据库被360后缀勒索病毒加密。许多重要的数据被锁定无法正常读取,严重影响了企业的正…...
详解Kafka分区机制原理|Kafka 系列 二
Kafka 系列第二篇,详解分区机制原理。为了不错过更新,请大家将本号“设为星标”。 点击上方“后端开发技术”,选择“设为星标” ,优质资源及时送达 上一篇文章介绍了 Kafka 的基本概念和术语,里面有个概念是 分区(Part…...

[特殊字符] 智能合约中的数据是如何在区块链中保持一致的?
🧠 智能合约中的数据是如何在区块链中保持一致的? 为什么所有区块链节点都能得出相同结果?合约调用这么复杂,状态真能保持一致吗?本篇带你从底层视角理解“状态一致性”的真相。 一、智能合约的数据存储在哪里…...
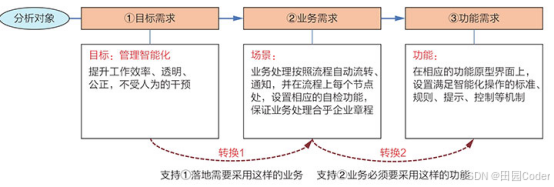
大话软工笔记—需求分析概述
需求分析,就是要对需求调研收集到的资料信息逐个地进行拆分、研究,从大量的不确定“需求”中确定出哪些需求最终要转换为确定的“功能需求”。 需求分析的作用非常重要,后续设计的依据主要来自于需求分析的成果,包括: 项目的目的…...

逻辑回归:给不确定性划界的分类大师
想象你是一名医生。面对患者的检查报告(肿瘤大小、血液指标),你需要做出一个**决定性判断**:恶性还是良性?这种“非黑即白”的抉择,正是**逻辑回归(Logistic Regression)** 的战场&a…...
Reasoning over Uncertain Text by Generative Large Language Models
https://ojs.aaai.org/index.php/AAAI/article/view/34674/36829https://ojs.aaai.org/index.php/AAAI/article/view/34674/36829 1. 概述 文本中的不确定性在许多语境中传达,从日常对话到特定领域的文档(例如医学文档)(Heritage 2013;Landmark、Gulbrandsen 和 Svenevei…...
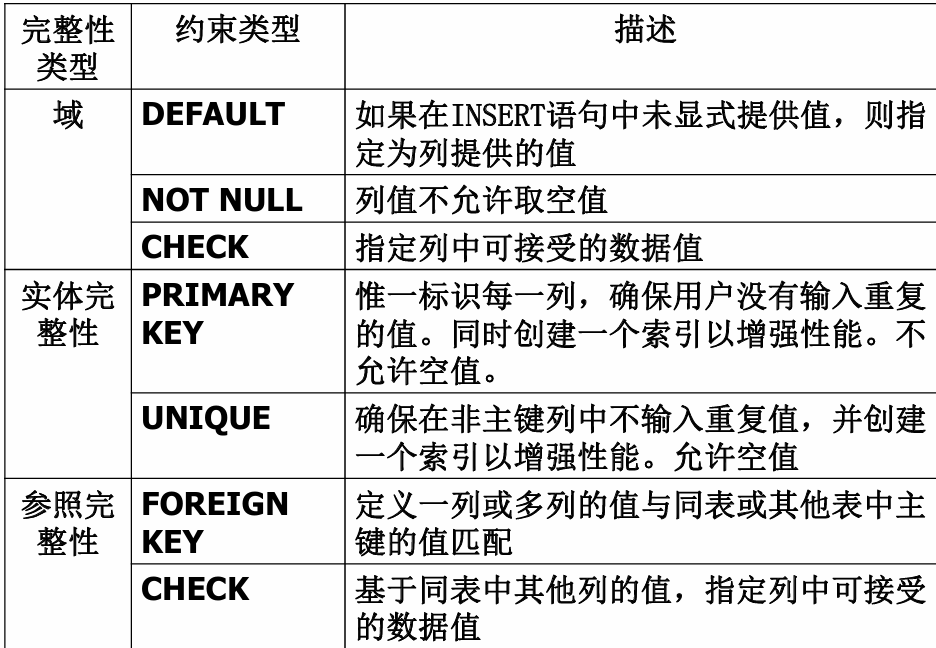
七、数据库的完整性
七、数据库的完整性 主要内容 7.1 数据库的完整性概述 7.2 实体完整性 7.3 参照完整性 7.4 用户定义的完整性 7.5 触发器 7.6 SQL Server中数据库完整性的实现 7.7 小结 7.1 数据库的完整性概述 数据库完整性的含义 正确性 指数据的合法性 有效性 指数据是否属于所定…...

莫兰迪高级灰总结计划简约商务通用PPT模版
莫兰迪高级灰总结计划简约商务通用PPT模版,莫兰迪调色板清新简约工作汇报PPT模版,莫兰迪时尚风极简设计PPT模版,大学生毕业论文答辩PPT模版,莫兰迪配色总结计划简约商务通用PPT模版,莫兰迪商务汇报PPT模版,…...

Caliper 配置文件解析:fisco-bcos.json
config.yaml 文件 config.yaml 是 Caliper 的主配置文件,通常包含以下内容: test:name: fisco-bcos-test # 测试名称description: Performance test of FISCO-BCOS # 测试描述workers:type: local # 工作进程类型number: 5 # 工作进程数量monitor:type: - docker- pro…...

libfmt: 现代C++的格式化工具库介绍与酷炫功能
libfmt: 现代C的格式化工具库介绍与酷炫功能 libfmt 是一个开源的C格式化库,提供了高效、安全的文本格式化功能,是C20中引入的std::format的基础实现。它比传统的printf和iostream更安全、更灵活、性能更好。 基本介绍 主要特点 类型安全:…...
uni-app学习笔记三十五--扩展组件的安装和使用
由于内置组件不能满足日常开发需要,uniapp官方也提供了众多的扩展组件供我们使用。由于不是内置组件,需要安装才能使用。 一、安装扩展插件 安装方法: 1.访问uniapp官方文档组件部分:组件使用的入门教程 | uni-app官网 点击左侧…...
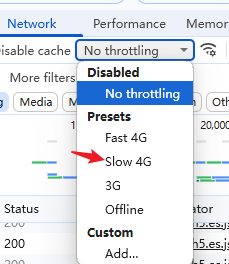
如何把工业通信协议转换成http websocket
1.现状 工业通信协议多数工作在边缘设备上,比如:PLC、IOT盒子等。上层业务系统需要根据不同的工业协议做对应开发,当设备上用的是modbus从站时,采集设备数据需要开发modbus主站;当设备上用的是西门子PN协议时…...