48.在ROS中实现local planner(1)- 实现一个可以用的模板
有了之前45.在ROS中实现global planner(1)- 实现一个可以用模板的global planner的经验, 现在再去创建一个local planner的包就容易多了
1. 创建包
- 创建
cd ~/pibot_ros/ros_ws/src # 这里可以使用自己的ros workspace
catkin_create_pkg sample_local_planner
-
添加类
我们需要实现一个从nav_core::BaseLocalPlanner继承的类,nav_core::BaseLocalPlanner接口类定义在这里base_local_planner.h#L50)可以看到 -
修改编译
修改CMakeLists.txt,添加相关编译参数和选项 -
添加
bgp_plugin.xml文件
指定导出的类名称
<library path="lib/libsample_local_planner"><class name="sample_local_planner/LocalPlanner" type="sample_local_planner::LocalPlanner" base_class_type="nav_core::BaseLocalPlanner"><description>A sample implementation of a grid local planner </description></class>
</library>
目录结构这样
❯ tree sample_local_planner
sample_local_planner
├── bgp_plugin.xml
├── CMakeLists.txt
├── include
│ └── sample_local_planner
│ └── planner_node.h
├── package.xml
└── src└── planner_node.cpp
- 导出类
参考navigation里面, 添加宏导出该类
PLUGINLIB_EXPORT_CLASS(sample_local_planner::LocalPlanner, nav_core::BaseLocalPlanner)
2. 接口实现
2.1 接口
base_local_planner.h#L50)可以看到接口类
namespace nav_core {class BaseLocalPlanner{public:virtual bool computeVelocityCommands(geometry_msgs::Twist& cmd_vel) = 0;virtual bool isGoalReached() = 0;virtual bool setPlan(const std::vector<geometry_msgs::PoseStamped>& plan) = 0;virtual void initialize(std::string name, tf2_ros::Buffer* tf, costmap_2d::Costmap2DROS* costmap_ros) = 0;};
}; // namespace nav_core通过命名大概就知道其定义,
initialize
初始化接口,给我们传相关功能接口的,如tf,costmapsetPlan
规划控制接口,给我们提供一个plan,这个应该是global planner的输出,通过move_base转了一手给到我们,后面可以看下move_base源码computeVelocityCommands
计算速度,传入的参数是一个引用,应该是输出函数,我们把计算好的速度填进去就可以isGoalReached
获取是否以及到达目标点
2.2 不同ros版本接口差异
BaseLocalPlanner在ros kinetic 中的initialize接口稍有差异 见base_local_planner.h#L78
// kinetic
virtual void initialize(std::string name, tf::TransformListener* tf, costmap_2d::Costmap2DROS* costmap_ros) = 0;// melodic&noetic
virtual void initialize(std::string name, tf2_ros::Buffer* tf, costmap_2d::Costmap2DROS* costmap_ros) = 0;
后面我们以melodic&noetic实现
2.3 实现
主要代码如下,stopwatch_为计时器,我们在setPlan调用后,设置变量,computeVelocityCommands接口中设置固定的速度,在时间到达后,输出0,同时isGoalReached接口返回true
void LocalPlanner::initialize(std::string name, tf::TransformListener *tf,costmap_2d::Costmap2DROS *costmap_ros){ROS_INFO("LocalPlanner initialize");}bool LocalPlanner::computeVelocityCommands(geometry_msgs::Twist &cmd_vel){ROS_INFO("LocalPlanner computeVelocityCommands");if (start_flag_) {cmd_vel.linear.x = 0.2;cmd_vel.linear.y = 0;cmd_vel.angular.z = 0.8;} else {cmd_vel.linear.x = 0;cmd_vel.linear.y = 0;cmd_vel.angular.z = 0;}return true;}bool LocalPlanner::setPlan(const std::vector<geometry_msgs::PoseStamped> &orig_global_plan){ROS_INFO("LocalPlanner setPlan");if (!start_flag_) {start_flag_ = true;stopwatch_.reset();}return true;}bool LocalPlanner::isGoalReached(){if (stopwatch_.elapsed(std::chrono::seconds(2))){ROS_INFO("LocalPlanner GoalReached");return true;}return false;}
通过查看move_base源码,上面几个接口是在同一个线程被调用,所有后续不需要考虑资源竞争,即变量无需加锁
3. 测试
3.1 编译
cd ~/pibot_ros/ros_ws
catkin_make
3.2 测试
修改~/pibot_ros/src/pibot_simulator/move_base_params.yaml
# base_local_planner: "dwa_local_planner/DWAPlannerROS"
base_local_planner: sample_local_planner/LocalPlanner
dwa_local_planner/DWAPlannerROS ----> sample_local_planner/LocalPlanner
- 启动模拟器
pibot_simulator
- 查看当前的
local_planner
❯ rosparam get /move_base/base_local_planner
sample_local_planner/LocalPlanner # 输出sample_local_planner/LocalPlanner表示插件已经被正确加载
- 启动rviz发送点位,选点导航测试
pibot_view
3.3 测试结果
[ INFO] [1676647988.863610652]: make plan start:[0.000000 0.000000], goal:[-2.986773 4.282055]
[ INFO] [1676647989.063781836]: LocalPlanner setPlan
[ INFO] [1676647989.064015702]: LocalPlanner computeVelocityCommands
[ INFO] [1676647989.263707871]: LocalPlanner computeVelocityCommands
[ INFO] [1676647989.463771479]: LocalPlanner computeVelocityCommands
[ INFO] [1676647989.663754028]: LocalPlanner computeVelocityCommands
[ INFO] [1676647989.863583610]: LocalPlanner computeVelocityCommands
[ INFO] [1676647989.864067517]: make plan start:[0.000000 0.000000], goal:[-2.986773 4.282055]
[ INFO] [1676647990.063701815]: LocalPlanner setPlan
[ INFO] [1676647990.063874092]: LocalPlanner computeVelocityCommands
[ INFO] [1676647990.263710418]: LocalPlanner computeVelocityCommands
[ INFO] [1676647990.463773749]: LocalPlanner computeVelocityCommands
[ INFO] [1676647990.663630163]: LocalPlanner computeVelocityCommands
[ INFO] [1676647990.863635728]: LocalPlanner computeVelocityCommands
[ INFO] [1676647990.864087581]: make plan start:[0.000000 0.000000], goal:[-2.986773 4.282055]
[ INFO] [1676647991.063713670]: LocalPlanner setPlan
[ INFO] [1676647991.063894899]: LocalPlanner computeVelocityCommands
[ INFO] [1676647991.263639509]: LocalPlanner GoalReached通过日志可以看出
- 在全局规划(
make plan start是我们前面文章新增的astar planner输出)后LocalPlanner的接口setPlan被调用 computeVelocityCommands函数没0.2s被调用一次, 期间机器人也在做圆周运动- 全局规划再次被调用(
move_bsae里配置了规划频率1hz,这里可以看到间隔1s全局规划一次),重复前面的 - 直到超时
GoalReached返回true完成
4. 总结
本文简单实现了一个local planner的插件,显然实际没啥用,不过可以作为一个模板,基于该模板实现自己的算法。后面我们将基于该模板实现可用的局部规划控制。
本文代码见sample_local_planner
相关文章:
- 实现一个可以用的模板)
48.在ROS中实现local planner(1)- 实现一个可以用的模板
有了之前45.在ROS中实现global planner(1)- 实现一个可以用模板的global planner的经验, 现在再去创建一个local planner的包就容易多了 1. 创建包 创建 cd ~/pibot_ros/ros_ws/src # 这里可以使用自己的ros workspace catkin_create_pkg sample_loc…...

jenkins基础部署
一、jenkins是什么1.Jenkins的前身是Hudson,采用JAVA编写的持续集成开源工具。Hudson由Sun公司在2004年启动,第一个版本于2005年在java.net发布。2007年开始Hudson逐渐取代CruiseControl和其他的开源构建工具的江湖地位。在2008年的JavaOne大会上在开发者…...
Unity3D -知识点(1)
1.场景视图鼠标滚轮:场景放大缩小鼠标右键:场景左右平移场景编辑器中,能看到什么?网格,每一格大小为1unit,建模不同,规定不同,(对应屏幕上100个像素)世界坐标系y轴向上为正x轴向右为…...

【学习笔记】NOIP暴零赛3
博弈(game) 观察到博弈过程中胜负态不会发生改变,那么求出从每个棋子出发能走的最长链,然后背包即可。 复杂度O(nm)O(nm)O(nm)。 #include<bits/stdc.h> #define ll long long #define pb push_back using namespace std; const int mod9982443…...

Java JSR规范列表
Java JSR规范列表目录概述需求:设计思路实现思路分析1.JSR2.JSR方法3.web service4.Webservice:5.数据处理器拓展实现参考资料和推荐阅读Survive by day and develop by night. talk for import biz , show your perfect code,full busy,skip hardness,m…...
Java必备小知识点1
Java程序类型: Applications和AppletApplications:是指在计算机操作系统中运行的程序。是完整的程序,能独立运行。被编译后,用普通的Java解释器就可以使其边解释边执行。必定含有一个main方法,程序执行时,首先寻找main方法&#x…...

JavaScript作用域、闭包
文章目录作用域、作用域链作用域作用域链循环中的作用域自由变量、闭包自由变量闭包的定义、表现、应用如何确定在闭包中获取正确的变量总结作用域、作用域链 作用域 编程语言中存储、访问、修改变量当中的值是一项基本能力、存储变量、访问变量必须按照一定的规则࿰…...
 对象)
JavaScript Date(日期) 对象
JavaScript Date 对象是 JavaScript 中用于处理日期和时间的内置对象。它可以用于获取当前时间、设置日期和时间、计算日期和时间之间的差异、以及将日期和时间格式化为各种字符串格式。在本文中,我们将详细介绍 JavaScript Date 对象的作用和在实际工作中的用途。 …...

rust过程宏 proc-macro-workshop解题-4-sorted
名字版本号rust1.69.0OSubuntu 22.04这一大关卡介绍的是属性式过程宏。 第一关:01-parse-enum 还是简单的看我们是否已经实现了一个属性式过程宏的空架子,如果有这个空架子,就直接通过了。 use proc_macro::TokenStream; use proc_macro2; use syn;#[proc_macro_attribut…...
数据结构与算法—队列
队列 队列介绍 有序列表,可以用数组或者链表实现。遵循先进先出原则。 数组实现队列 public class ArrayQueue {public static void main(String[] args) {ArrayQueue queue new ArrayQueue(3);// 接收用户输入char key ;Scanner sc new Scanner(System.in);…...

AcWing3416.时间显示——学习笔记
目录 题目 代码 AC结果 思路 关键步骤 题目 3416. 时间显示 - AcWing题库https://www.acwing.com/problem/content/description/3419/ 代码 import java.util.Scanner;public class Main {public static void main(String[] args){Scanner input new Scanner(System.in…...

贴吧手机端防删图GIF动态图制作解析
贴吧存活 思路技术运气 1:防删图不是存活的绝对因素,除了防删图,还有账号,ip,内容,吧的问题 2:一个图不是每个吧都可以发 3:一个贴不被删不仅仅看图片 4:有时候运气也很…...
iOS接入Google登录
1.在Google Cloud后台配置客户端ID 首先要在 Google Cloud 中创建一个项目。新创建的Project需要先配置同意屏幕。一共有4步骤需要配置。 1.OAuth 同意屏幕 User Type选择"外部"进行创建。填写必必要的信息,应用名称、用户支持电子邮件地址、开发者电子邮…...
【C语言】大小端字节序问题
一、大小端字节序问题 大小端是由CPU决定的,大小端可以理解为字节顺序,所以大小端全称叫大端字节序、小端字节序。其实大端、小端这两个词是从《格列佛游记》里出来的。《格列佛游记》有一段讲的是吃鸡蛋是从大的那头敲开还是小的那头敲开的问题…...
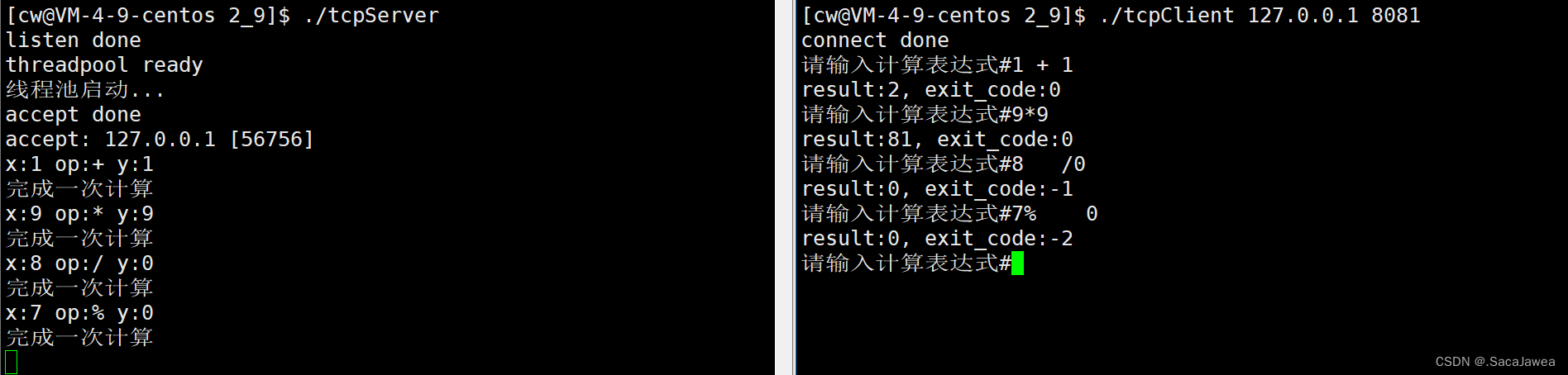
Linux | 网络通信 | 序列化和反序列化的讲解与实现
文章目录为什么要序列化?协议的实现服务端与客户端代码实现为什么要序列化? 由于默认对齐数的不同,不同的平台对相同数据进行内存对齐后,可能得到不同的数据。如果直接将这些数据进行网络传输,对方很可能无法正确的获…...
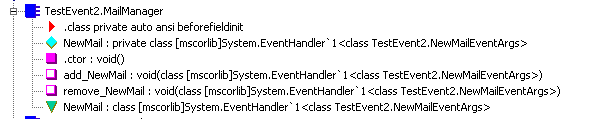
C#的委托原理刨析and事件原理刨析和两者的比较
什么是委托委托是一种引用类型,表示对具有特定参数列表和返回类型的方法的引用。 在实例化委托时,你可以将其实例与任何具有兼容参数和返回类型的方法进行绑定。 你可以通过委托实例调用方法。简单的理解,委托是方法的抽象类,它定…...
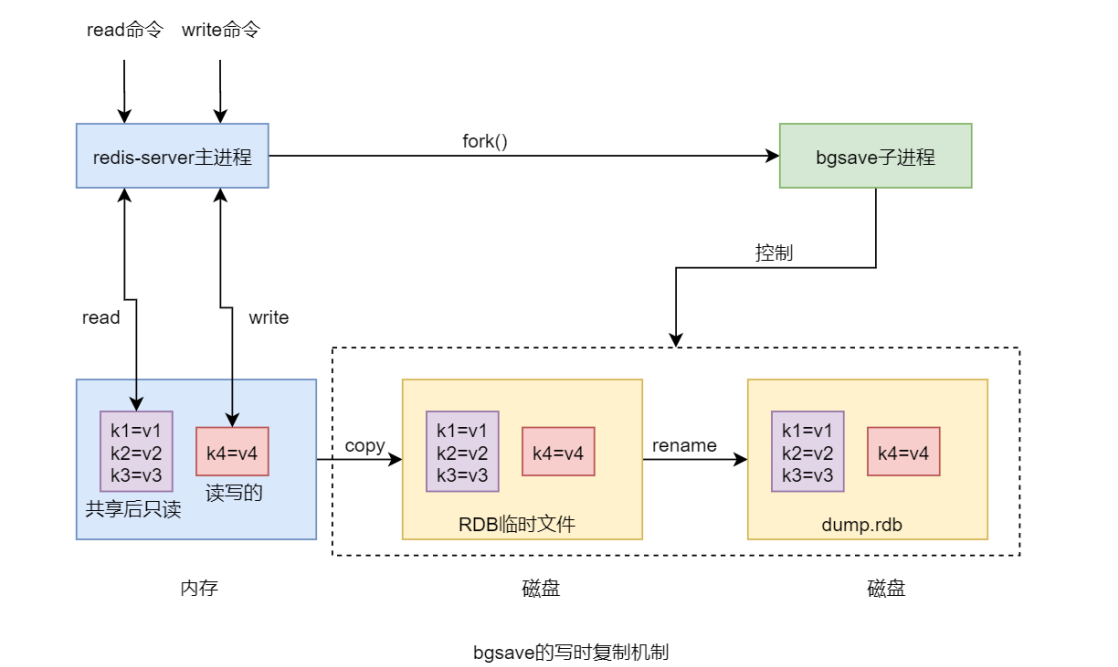
Redis学习【8】之Redis RDB持久化
文章目录Redis 持久化1 持久化基本原理2 RDB(Redis DataBase) 持久化2.1 持久化的执行2.2 手动 save 命令2.3 手动 bgsave 命令2.4 自动条件触发2.5 查看持久化时间3 RDB 优化配置3.1 save3.2 stop-write-on-bgsave-error3.3 rdbcompression3.4 rdbchecksum3.5 sanitize-dump-p…...
SpringSecurity认证
文章目录登陆校验流程依赖yaml实现建表、工具类、实体类加密器、AuthenticationManager登录逻辑登录过滤器、配置过滤器登出登陆校验流程 认证 登录: ①自定义登录接口 调用ProviderManager的方法进行认证 如果认证通过生成token,根据userId把用…...

Socket套接字
概念 Socket套接字,是由系统提供用于网络通信的技术,是基于TCP/IP协议的网络通信的基本操作单元。基于Socket套接字的网络程序开发就是网络编程。 分类 Socket套接字主要针对传输层协议划分为如下三类: 流套接字:使用传输层TCP…...

mysql详解之innoDB
索引 Mysql由索引组织,所以索引是mysql多重要概念之一。 聚簇索引 InnoDB和MyISAm一样都是采用B树结构,但不同点在于InnoDB是聚簇索引(或聚集索引),将数据行直接放在叶子节点后面。 这里可能存在一个误区࿱…...

MogFace人脸检测模型在学术论文写作中的应用:自动生成图表与结果可视化
MogFace人脸检测模型在学术论文写作中的应用:自动生成图表与结果可视化 如果你是一位正在撰写人脸检测相关论文的研究者,我猜你一定经历过这样的时刻:为了绘制一张精度-召回率曲线图,你需要在多个数据集上手动运行模型、整理数据…...

macOS环境下Fiji启动故障深度修复指南:从崩溃分析到架构优化
macOS环境下Fiji启动故障深度修复指南:从崩溃分析到架构优化 【免费下载链接】fiji A "batteries-included" distribution of ImageJ :battery: 项目地址: https://gitcode.com/gh_mirrors/fi/fiji 当科研人员在搭载Apple Silicon芯片的Mac上启动F…...

嵌入式代码比对:单片机固件版本差异分析与工具选型
1. 单片机开发中的代码版本比对:工程实践与工具选型在嵌入式硬件开发流程中,代码版本管理远非仅限于“保存多个副本”的简单操作。当一个基于STM32F407的电机控制固件从v1.2升级至v1.3,或ESP32-WROVER模组的Wi-Fi配网逻辑在三次迭代后发生结构…...

嵌入式内存管理:六种动态分区算法工程对比
1. 嵌入式系统内存管理算法工程实践综述在资源受限的嵌入式环境中,内存管理并非操作系统内核的专属领域,而是贯穿从Bootloader初始化、RTOS任务调度到裸机应用开发全生命周期的核心能力。MCU通常仅配备数十KB至数百KB的片上SRAM,外部扩展SDRA…...
)
可重构电池系统的结构分析,用于主动故障诊断(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...

利用Spring Boot构建高效文学名著共享平台的技术实践
1. 为什么选择Spring Boot构建文学共享平台 第一次接触文学名著共享平台的需求时,我脑海中闪过的第一个念头就是:这玩意儿得扛得住高并发啊!想象一下《红楼梦》新版本上线时,成千上万书迷同时涌入的场景,传统Java EE架…...

VSCode离线安装Python插件全攻略:Pylance和Python Debugger保姆级教程
VSCode离线安装Python插件全攻略:Pylance和Python Debugger保姆级教程 在软件开发领域,网络环境并非总是可靠。无论是企业内网的安全限制,还是远程工作时的网络波动,都可能阻碍开发者正常获取VSCode插件。本文将手把手教你如何在完…...

用Comsol探索金属合金凝固的数值模拟世界
comsol数值模拟。 金属合金凝固数值模拟,连铸过程数值模拟,相场流场温度场,坯壳厚度计算。在材料科学和金属加工领域,数值模拟已经成为一种强大的工具,帮助我们深入理解复杂的物理过程。今天,咱们就来唠唠用…...

从相机取景到屏幕成像:深入解析MVP变换的图形学原理
1. 从拍照到成像:理解MVP变换的摄影类比 想象你是一位摄影师,正准备拍摄一组静物照片。首先,你会精心摆放桌上的水果和花瓶——这相当于图形学中的模型变换(Model Transformation)。接着,你要调整三脚架高度…...

VibeVoice多说话人识别技术解析与应用
VibeVoice多说话人识别技术解析与应用 1. 引言 你有没有想过,输入一段多人对话脚本,AI就能自动生成不同角色自然交谈的语音内容?不是机械的电子音,而是有停顿、有情感、能互动的真实对话。微软开源的VibeVoice框架让这个想象变成…...