ROS2 入门应用 引用自定义消息(C++)
ROS2 入门应用 引用自定义消息(C++)
- 1. 查看自定义消息
- 2. 修改话题发布
- 3. 修改话题订阅
- 4. 修改依赖关系
- 5. 修改编译信息
- 6. 编译和运行
1. 查看自定义消息
引用在《ROS2 入门应用 创建自定义接口》中自定义的消息Sphere.msg
ros2 interface show tutorial_interfaces/msg/Sphere# geometry_msgs/Point center
# float64 x
# float64 y
# float64 z
# float64 radius
需要对《ROS2 入门应用 发布和订阅(C++)》中创建的发布者/订阅者功能包稍作修改
cd ~/ros2_ws/src/cpp_pubsub/src
将把数值的字符串更改为球体半径
2. 修改话题发布
修改publisher_member_function.cpp话题发布源文件,涉及话题类型变更和应用变化
#include <chrono>
#include <memory>#include "rclcpp/rclcpp.hpp"
#include "tutorial_interfaces/msg/sphere.hpp" // CHANGE/* 方便表示时间 */
using namespace std::chrono_literals;/* 继承rclcpp:: node创建节点类MinimalPublisher */
class MinimalPublisher : public rclcpp::Node
{public:/* 公共构造函数将节点命名为minimal_publisher,并将count_初始化为0 */MinimalPublisher(): Node("minimal_publisher"), count_(0){/* 初始化发布者publisher_ ,使用Sphere消息类型、主题名称topic和在发生备份时限制消息所需的队列大小10 */publisher_ = this->create_publisher<tutorial_interfaces::msg::Sphere>("topic", 10); // CHANGE/* 初始化timer_,设置timer_callback函数每500ms执行一次 */timer_ = this->create_wall_timer(500ms, std::bind(&MinimalPublisher::timer_callback, this));}private:/* 定义定时器回调函数 */void timer_callback(){/* 打印并发布球体半径信息 */auto message = tutorial_interfaces::msg::Sphere(); // CHANGEmessage.radius = this->count_++; // CHANGERCLCPP_INFO_STREAM(this->get_logger(), "Publishing: '" << message.radius << "'"); // CHANGEpublisher_->publish(message);}/* 计时器、发布者和计数器字段的声明 */rclcpp::TimerBase::SharedPtr timer_;rclcpp::Publisher<tutorial_interfaces::msg::Sphere>::SharedPtr publisher_; // CHANGEsize_t count_;
};int main(int argc, char * argv[])
{/* 初始化ROS2 */rclcpp::init(argc, argv);/* 运行节点MinimalPublisher */rclcpp::spin(std::make_shared<MinimalPublisher>());/* 退出ROS2 */rclcpp::shutdown();return 0;
}
3. 修改话题订阅
修改subscriber_member_function.cpp话题订阅源文件,涉及话题类型变更和应用变化
#include <memory>#include "rclcpp/rclcpp.hpp"
#include "tutorial_interfaces/msg/sphere.hpp" // CHANGE/* 占位符,代替回调函数中的第一个参数 */
using std::placeholders::_1;/* 继承rclcpp:: node创建节点类MinimalSubscriber */
class MinimalSubscriber : public rclcpp::Node
{public:/* 公共构造函数将节点命名为minimal_subscriber */MinimalSubscriber(): Node("minimal_subscriber"){/* 初始化订阅者subscription_ ,使用Sphere消息类型、主题名称topic和在发生备份时限制消息所需的队列大小10,订阅话题回调函数topic_callback */subscription_ = this->create_subscription<tutorial_interfaces::msg::Sphere>( // CHANGE"topic", 10, std::bind(&MinimalSubscriber::topic_callback, this, _1));}private:/* 定义订阅话题回调函数 */void topic_callback(const tutorial_interfaces::msg::Sphere & msg) const // CHANGE{/* 打印话题消息的球体半径信息 */RCLCPP_INFO_STREAM(this->get_logger(), "I heard: '" << msg.radius << "'");}/* 订阅者字段的声明 */rclcpp::Subscription<tutorial_interfaces::msg::Sphere >::SharedPtr subscription_; // CHANGE
};int main(int argc, char * argv[])
{/* 初始化ROS2 */rclcpp::init(argc, argv);/* 运行节点MinimalSubscriber*/rclcpp::spin(std::make_shared<MinimalSubscriber>());/* 退出ROS2 */rclcpp::shutdown();return 0;
}4. 修改依赖关系
在package.xml清单文件中,添加对自定义消息的依赖项的声明
<depend>tutorial_interfaces</depend>
5. 修改编译信息
在CMakeLists.txt编译文件中
- 更换搜索库
tutorial_interfaces - 更换可执行文件目标依赖关系
tutorial_interfaces
#...find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(tutorial_interfaces REQUIRED) # CHANGEadd_executable(talker src/publisher_member_function.cpp)
ament_target_dependencies(talker rclcpp tutorial_interfaces) # CHANGEadd_executable(listener src/subscriber_member_function.cpp)
ament_target_dependencies(listener rclcpp tutorial_interfaces) # CHANGEinstall(TARGETStalkerlistenerDESTINATION lib/${PROJECT_NAME})ament_package()
6. 编译和运行
进入工作空间根目录
cd ~/ros2_ws
编译:
colcon build --packages-select cpp_pubsub
打开一个新终端,运行话题发布节点:
ros2 run cpp_pubsub talker# [INFO] [minimal_publisher]: Publishing: '0'
# [INFO] [minimal_publisher]: Publishing: '1'
# [INFO] [minimal_publisher]: Publishing: '2'
打开一个新终端,运行话题订阅节点:
ros2 run cpp_pubsub listener# [INFO] [minimal_subscriber]: I heard: '10'
# [INFO] [minimal_subscriber]: I heard: '11'
# [INFO] [minimal_subscriber]: I heard: '12'
谢谢
相关文章:
)
ROS2 入门应用 引用自定义消息(C++)
ROS2 入门应用 引用自定义消息(C)1. 查看自定义消息2. 修改话题发布3. 修改话题订阅4. 修改依赖关系5. 修改编译信息6. 编译和运行1. 查看自定义消息 引用在《ROS2 入门应用 创建自定义接口》中自定义的消息Sphere.msg ros2 interface show tutorial_i…...

Spring中的数据校验
数据校验基础 参考: Java Bean Validation 规范 Spring对Bean Validation的支持 Spring定义了一个接口org.springframework.validation.Validator,用于应用相关的对象的校验器。 这个接口完全从基础设施或者上下文中脱离的,这意味着它没有…...

python批量翻译excel表格中的英文
python批量翻译excel表格中的英文需求背景主要设计分析具体实现表格操作请求百度翻译api多线程控制台显示进度完整源码需求背景 女朋友的论文需要爬取YouTube视频热评,但爬下来的都是外文。 主要设计 读取一个表格文件,获取需要翻译的文本 使用百度翻译…...
基于SSM框架的RBAC权限系统设计与 实现
基于SSM框架的RBAC权限系统设计与 实现 ✌全网粉丝20W,csdn特邀作者、博客专家、CSDN新星计划导师、java领域优质创作者,博客之星、掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java技术领域和毕业项目实战✌ 🍅文末获取项目下载方式🍅 一、项目背景…...
目标检测各常见评价指标详解
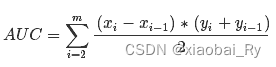
注:本文仅供学习,未经同意请勿转载 说明:该博客来源于xiaobai_Ry:2020年3月笔记 对应的PDF下载链接在:待上传 目录 常见的评价指标 准确率 (Accuracy) 混淆矩阵 (Confusion Matrixÿ…...

深入讲解Kubernetes架构-控制器
在机器人技术和自动化领域,控制回路(Control Loop)是一个非终止回路,用于调节系统状态。这是一个控制环的例子:房间里的温度自动调节器。当你设置了温度,告诉了温度自动调节器你的期望状态(Desi…...

Urho3D本地化 国际化
本地化子系统提供了创建多语言应用程序的简单方法。 初始化 在使用子系统之前,需要加载本地化字符串集合。通常的做法是在应用程序启动时执行此操作。可以加载多个集合文件,每个集合文件只能定义一种或多种语言。例如: Localization* l10n…...
千锋教育嵌入式物联网教程之系统编程篇学习-04
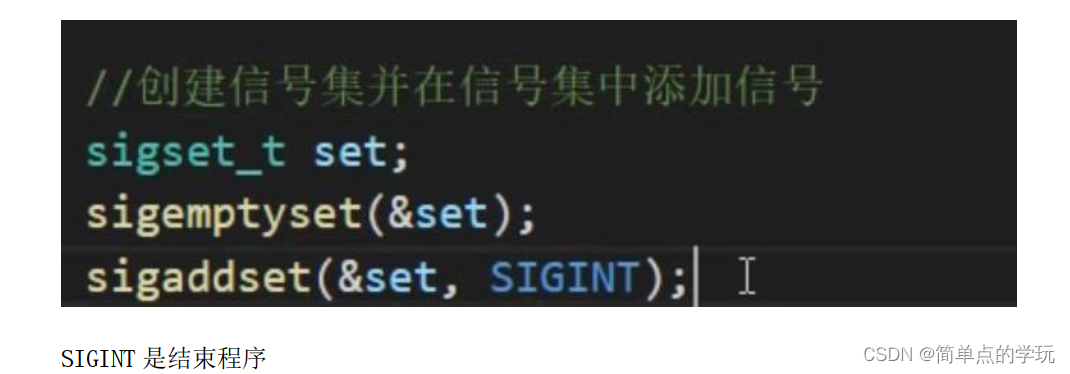
目录 alarm函数 raise函数 abort函数 pause函数 转折点 signal函数 可重入函数 信号集 sigemptyset() sigfillset sigismember() sigaddset() sigdelset() 代码讲解 信号阻塞集 sigprocmask() alarm函数 相当于一个闹钟,默认动作是终止调用alarm函数的进…...

【运维】什么是 DevOps?
文章目录什么是 DevOps?如何实现 DevOpsDevOps工作原理: DevOps生命周期DevOps 文化DevOps 工具:构建 DevOps 工具链DevOps 和云原生开发什么是 DevSecOps?DevOps 和站点可靠性工程 (SRE)什么是 DevOps? DevOps 通过结…...

【C++入门】引用、内联函数、auto关键字、基于范围的for循环(C++11)、指针空值nullptr(C++11)
文章目录引用引用概念引用特性引用使用场景常引用内联函数宏的优缺点?C有哪些技术替代宏?auto关键字auto不能推导的场景基于范围的for循环(C11)指针空值nullptr(C11)引用 引用概念 引用不是新定义一个变量,而是给已存在变量取了一个别名&…...
《FPGA学习》->多个按键控制LED灯
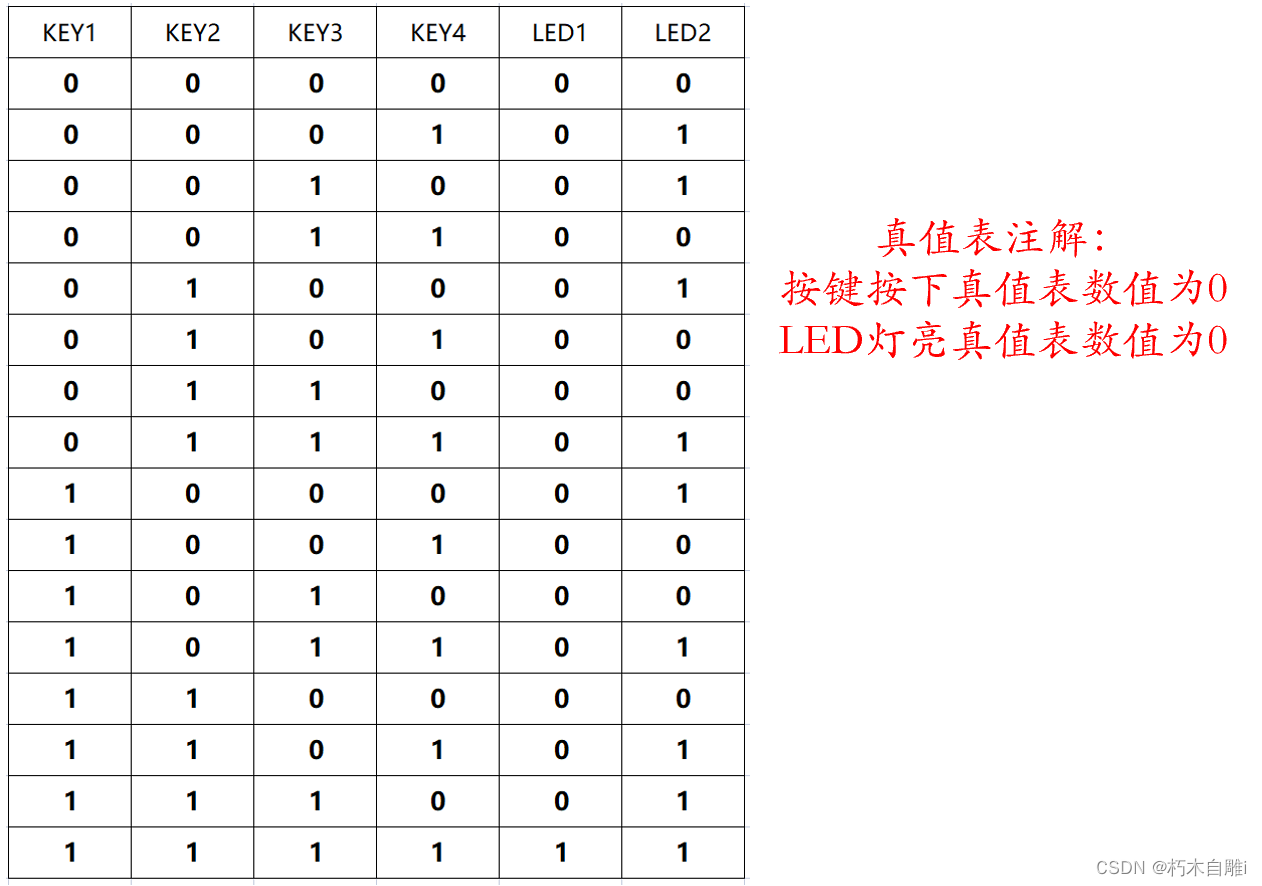
🍎与其担心未来,不如现在好好努力。在这条路上,只有奋斗才能给你安全感。你若努力,全世界都会为你让路。本次项目任务,利用开发板上的4个按键KEY1,KEY2,KEY3,KEY4和2个LED灯LED1&…...
-项目与程序结构(2))
vb.net计算之.net core基础(4)-项目与程序结构(2)
目录 Namespace 语句Visual Basic 中的命名空间完全限定名命名空间可以定义什么全局关键字命名规范条件编译拆分和合并语句拆分成多行在同一行上放置多个语句为代码行添加标签注释串联成员访问运算符点运算符 `.`感叹号 `!`运算符Me 关键字MyMyBaseMyClassNamespace 语句 <…...
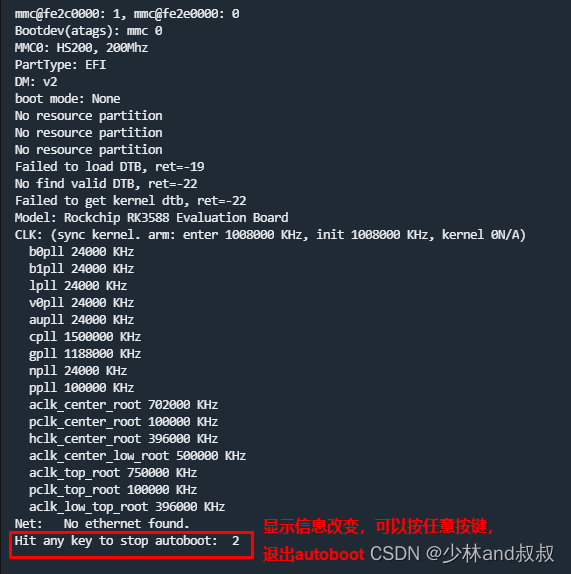
基于RK3588的嵌入式linux系统开发(五)——uboot优化修改(按任意按键停止autoboot)
我们通常情况下,芯片进入uboot后,会根据设置的bootdelay时间进行倒数计数。这时候在终端按任意键,即可退出autoboot,进入uboot的命令行模式。 官方提供的uboot源码中,为了防止调试串口干扰导致不能进入系统,…...

Lumerical---在FDTD和MODE工程中的PML边界条件
Lumerical---在FDTD和MODE工程中的PML边界条件 引言PML边界条件实现原理PML 类型PML 配置文件PML 配置文件选项Standard(标准)Stabilized(稳定性)Steep AngleCustom(陡角)对于不同的边界使用不同的配置FDE,varFDTD和FDTD SolverPML 参数阅读这篇前,推荐阅读边界条件综述…...

论文投稿指南——中文核心期刊推荐(社会学)
【前言】 🚀 想发论文怎么办?手把手教你论文如何投稿!那么,首先要搞懂投稿目标——论文期刊 🎄 在期刊论文的分布中,存在一种普遍现象:即对于某一特定的学科或专业来说,少数期刊所含…...

KVM-4、KVM 高级功能详解
1. 半虚拟化驱动 1.1 virtio 概述 KVM 是必须使用硬件虚拟化辅助技术(如 Intel VT-x 、AMD-V)的 Hypervisor,在CPU 运行效率方面有硬件支持,其效率是比较高的;在有 Intel EPT 特性支持的平台上,内存虚拟化的效率也较高。 QEMU/KVM 提供了全虚拟化环境,可以让客户机不经…...
【Linux】进程状态
文章目录1. 阻塞1. 举例2. 为什么要阻塞?3.操作系统层面上如何理解进程等待某种资源就绪呢?资源进程4. 总结2.挂起3.Linux进程状态1. R状态进程只要是R状态,就一定是在CPU运行吗?证明当前进程运行状态生成程序查看进程2. S休眠状态…...
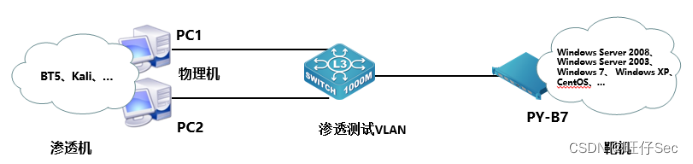
2023河南省第二届职业技能大赛郑州市选拔赛“网络安全”项目比赛样题任务书
2023河南省第二届职业技能大赛郑州市选拔赛“网络安全” 项目比赛样题任务书 一、竞赛时间 共计360分钟。 竞赛任务书内容 2023河南省第二届职业技能大赛郑州市选拔赛“网络安全” 项目比赛样题任务书 A模块基础设施设置/安全加固(200分) A-1&…...

pygame8 扫雷游戏
一、游戏规则: 1、点击方格,如果是地雷,游戏失败,找到所有地雷游戏胜利 2、如果方块上出现数字,则表示在其周围的八个方块中共有多少颗地雷 二、游戏主逻辑: 主要逻辑即调用run_game, 然后循环检测事件…...
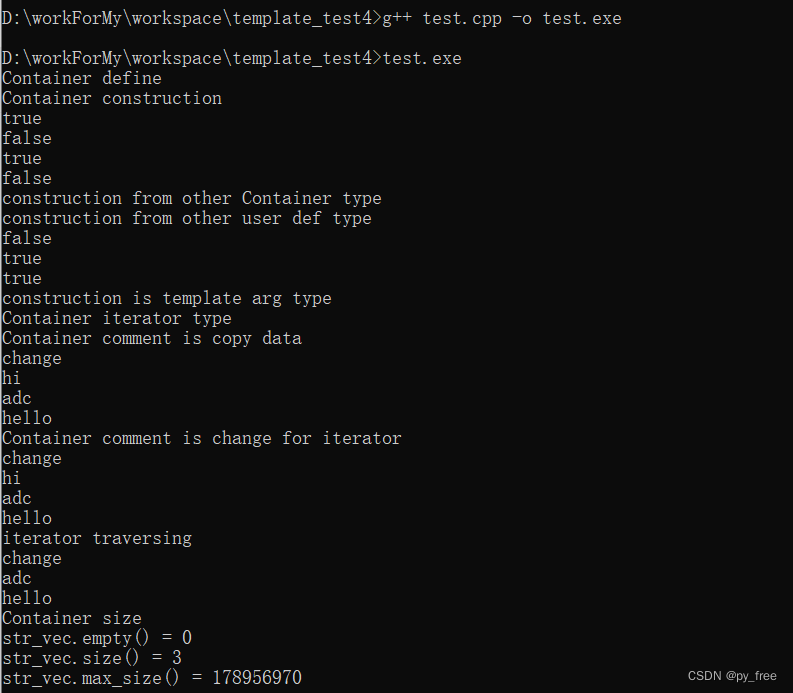
c/c++开发,无可避免的模板编程实践(篇四)
一、容器与模板 前文就说到,标准库基于模板编程,定义了许多容器类以及一系列泛型算法,使程序员可以更简洁、抽象和有效地编写程序。C标准库中有大量的标准容器,这些容器通常包含一组数据或对象的集合,几乎可以和任何类…...

智慧工地云平台源码,基于微服务架构+Java+Spring Cloud +UniApp +MySql
智慧工地管理云平台系统,智慧工地全套源码,java版智慧工地源码,支持PC端、大屏端、移动端。 智慧工地聚焦建筑行业的市场需求,提供“平台网络终端”的整体解决方案,提供劳务管理、视频管理、智能监测、绿色施工、安全管…...

Python如何给视频添加音频和字幕
在Python中,给视频添加音频和字幕可以使用电影文件处理库MoviePy和字幕处理库Subtitles。下面将详细介绍如何使用这些库来实现视频的音频和字幕添加,包括必要的代码示例和详细解释。 环境准备 在开始之前,需要安装以下Python库:…...

【OSG学习笔记】Day 16: 骨骼动画与蒙皮(osgAnimation)
骨骼动画基础 骨骼动画是 3D 计算机图形中常用的技术,它通过以下两个主要组件实现角色动画。 骨骼系统 (Skeleton):由层级结构的骨头组成,类似于人体骨骼蒙皮 (Mesh Skinning):将模型网格顶点绑定到骨骼上,使骨骼移动…...
k8s业务程序联调工具-KtConnect
概述 原理 工具作用是建立了一个从本地到集群的单向VPN,根据VPN原理,打通两个内网必然需要借助一个公共中继节点,ktconnect工具巧妙的利用k8s原生的portforward能力,简化了建立连接的过程,apiserver间接起到了中继节…...

华硕a豆14 Air香氛版,美学与科技的馨香融合
在快节奏的现代生活中,我们渴望一个能激发创想、愉悦感官的工作与生活伙伴,它不仅是冰冷的科技工具,更能触动我们内心深处的细腻情感。正是在这样的期许下,华硕a豆14 Air香氛版翩然而至,它以一种前所未有的方式&#x…...
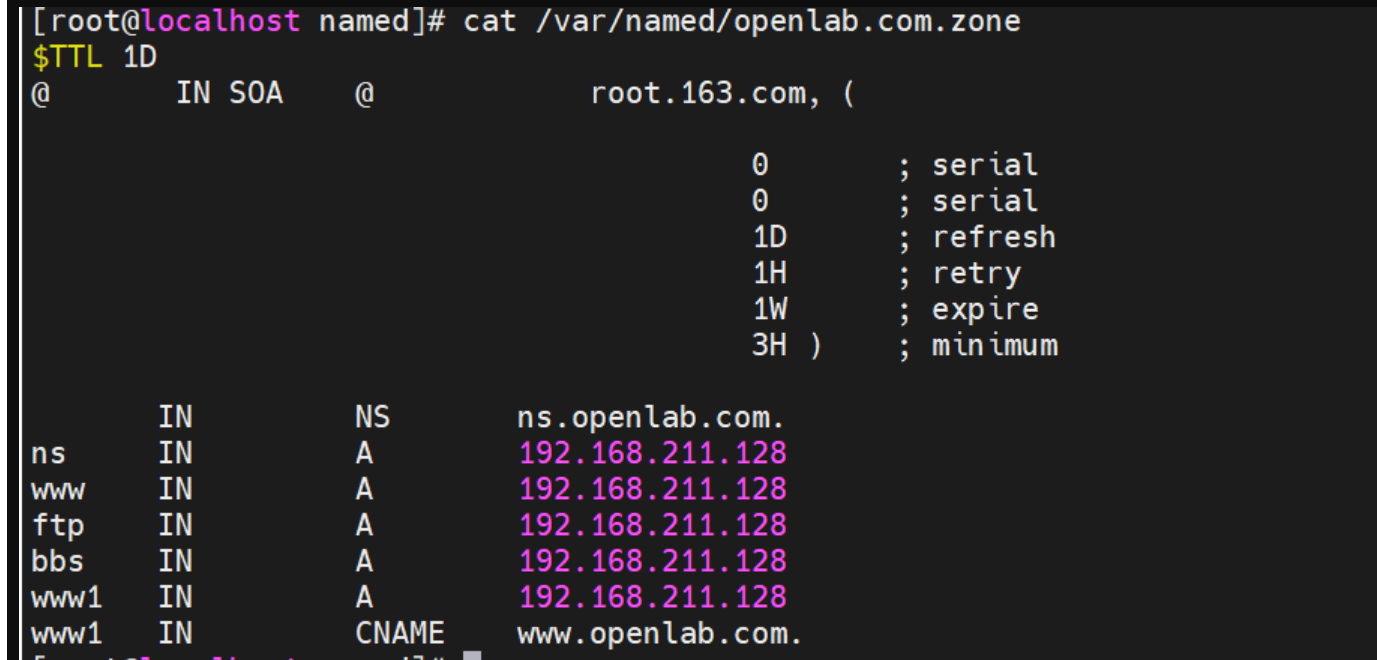
搭建DNS域名解析服务器(正向解析资源文件)
正向解析资源文件 1)准备工作 服务端及客户端都关闭安全软件 [rootlocalhost ~]# systemctl stop firewalld [rootlocalhost ~]# setenforce 0 2)服务端安装软件:bind 1.配置yum源 [rootlocalhost ~]# cat /etc/yum.repos.d/base.repo [Base…...
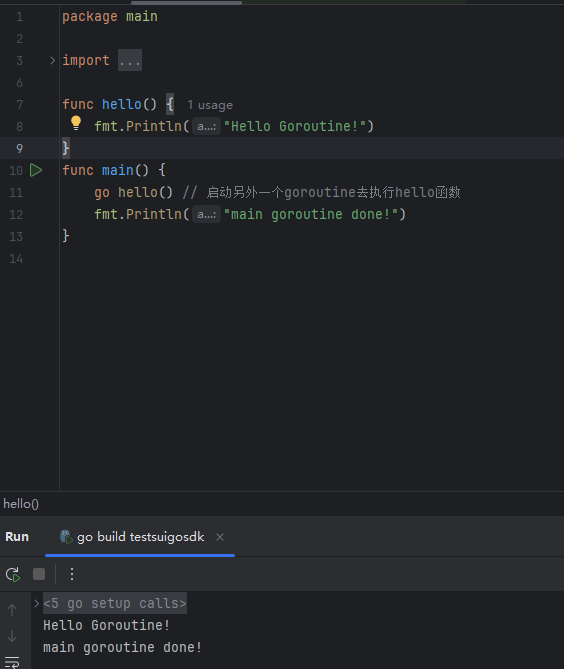
GO协程(Goroutine)问题总结
在使用Go语言来编写代码时,遇到的一些问题总结一下 [参考文档]:https://www.topgoer.com/%E5%B9%B6%E5%8F%91%E7%BC%96%E7%A8%8B/goroutine.html 1. main()函数默认的Goroutine 场景再现: 今天在看到这个教程的时候,在自己的电…...

【Android】Android 开发 ADB 常用指令
查看当前连接的设备 adb devices 连接设备 adb connect 设备IP 断开已连接的设备 adb disconnect 设备IP 安装应用 adb install 安装包的路径 卸载应用 adb uninstall 应用包名 查看已安装的应用包名 adb shell pm list packages 查看已安装的第三方应用包名 adb shell pm list…...
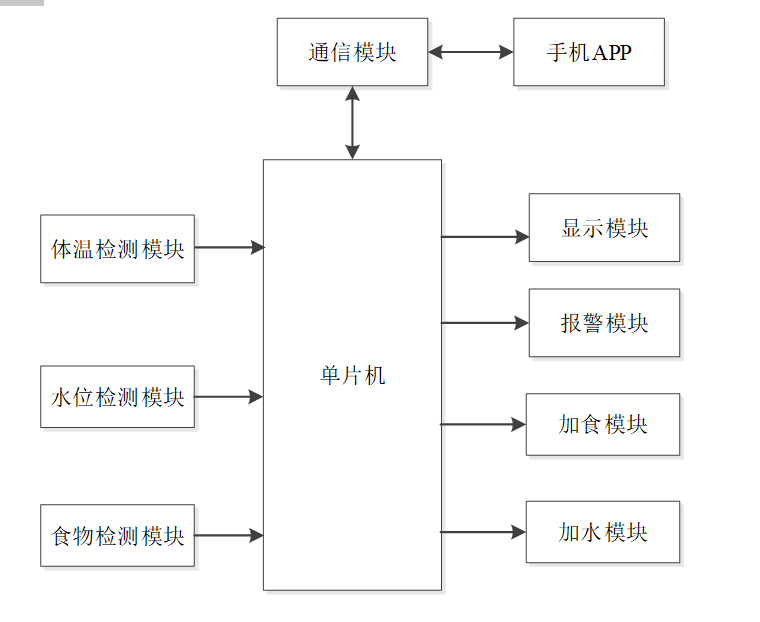
基于单片机的宠物屋智能系统设计与实现(论文+源码)
本设计基于单片机的宠物屋智能系统核心是实现对宠物生活环境及状态的智能管理。系统以单片机为中枢,连接红外测温传感器,可实时精准捕捉宠物体温变化,以便及时发现健康异常;水位检测传感器时刻监测饮用水余量,防止宠物…...

Windows 下端口占用排查与释放全攻略
Windows 下端口占用排查与释放全攻略 在开发和运维过程中,经常会遇到端口被占用的问题(如 8080、3306 等常用端口)。本文将详细介绍如何通过命令行和图形化界面快速定位并释放被占用的端口,帮助你高效解决此类问题。 一、准…...