OpenCV-Python中的图像处理-视频分析
OpenCV-Python中的图像处理-视频分析
- 视频分析
- Meanshift算法
- Camshift算法
- 光流
- Lucas-Kanade Optical Flow
- Dense Optical Flow
视频分析
学习使用 Meanshift 和 Camshift 算法在视频中找到并跟踪目标对象:
Meanshift算法
Meanshift 算法的基本原理是和很简单的。假设我们有一堆点(比如直方
图反向投影得到的点),和一个小的圆形窗口,我们要完成的任务就是将这个窗
口移动到最大灰度密度处(或者是点最多的地方)。如下图所示:
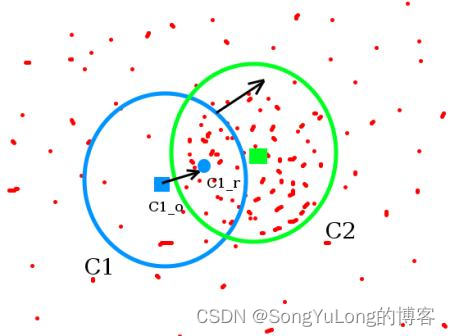
初始窗口是蓝色的“C1”,它的圆心为蓝色方框“C1_o”,而窗口中所有点质心却是“C1_r”(小的蓝色圆圈),很明显圆心和点的质心没有重合。所以移动圆心 C1_o 到质心 C1_r,这样我们就得到了一个新的窗口。这时又可以找到新窗口内所有点的质心,大多数情况下还是不重合的,所以重复上面的操作:将新窗口的中心移动到新的质心。就这样不停的迭代操作直到窗口的中心和其所包含点的质心重合为止(或者有一点小误差)。按照这样的操作我们的窗口最终会落在像素值(和)最大的地方。如上图所示“C2”是窗口的最后位址,我们可以看出来这个窗口中的像素点最多。
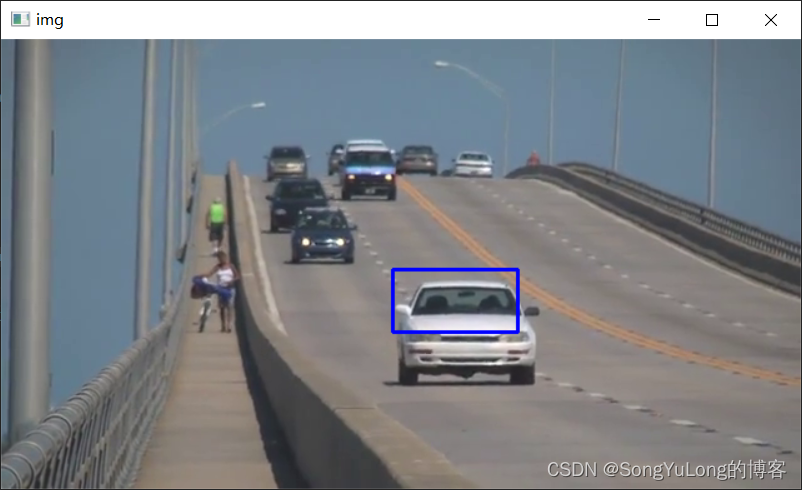
要在 OpenCV 中使用 Meanshift 算法首先我们要对目标对象进行设置,
计算目标对象的直方图,这样在执行 meanshift 算法时我们就可以将目标对
象反向投影到每一帧中去了。另外我们还需要提供窗口的起始位置。在这里我
们值计算 H( Hue)通道的直方图,同样为了避免低亮度造成的影响,我们使
用函数 cv2.inRange() 将低亮度的值忽略掉。
import numpy as np
import cv2
from matplotlib import pyplot as plt
# 视频下载地址https://www.bogotobogo.com/python/OpenCV_Python/images/mean_shift_tracking/slow_traffic_small.mp4
cap = cv2.VideoCapture('./resource/opencv/video/slow_traffic_small.mp4')ret,frame = cap.read()# setup initial location of window
x, y, w, h = 300, 200, 100, 50 # simply hardcoded the values
track_window = (x, y, w, h)# set up the ROI for tracking
roi = frame[y:y+h, x:x+w]hsv_roi = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
mask = cv2.inRange(hsv_roi, np.array((0., 60.,32.)), np.array((180.,255.,255.)))
roi_hist = cv2.calcHist([hsv_roi],[0],mask,[180],[0,180])
cv2.normalize(roi_hist,roi_hist,0,255,cv2.NORM_MINMAX)term_crit = (cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 1)while(1):ret, frame = cap.read()if ret == True:hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)dst = cv2.calcBackProject([hsv], [0], roi_hist, [0, 180], 1)ret, track_window = cv2.meanShift(dst, track_window, term_crit)x,y,w,h = track_windowimg2 = cv2.rectangle(frame, (x,y), (x+w, y+h), 255, 2)k = cv2.waitKey(60)&0xFFif k == 27:breakelse:cv2.imshow('img', img2)else:breakcap.release()
cv2.destroyAllWindows()
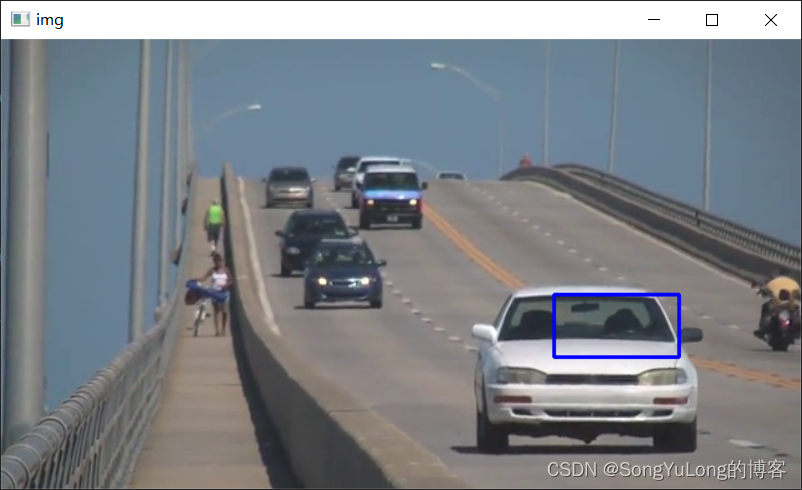
Camshift算法
与 Meanshift 基本一样,但是返回的结果是一个带旋转角度的矩形以及这个矩形的参数(被用到下一次迭代过程中)。
import numpy as np
import cv2
from matplotlib import pyplot as plt
# 视频下载地址https://www.bogotobogo.com/python/OpenCV_Python/images/mean_shift_tracking/slow_traffic_small.mp4
cap = cv2.VideoCapture('./resource/opencv/video/slow_traffic_small.mp4')# take first frame of the video
ret, frame = cap.read()# setup initial location of window
x, y, w, h = 300, 200, 100, 50 # simply hardcoded the values
track_window = (x, y, w, h)
# set up the ROI for tracking
roi = frame[y:y+h, x:x+w]
hsv_roi = cv2.cvtColor(roi, cv2.COLOR_BGR2HSV)
mask = cv2.inRange(hsv_roi, np.array((0., 60.,32.)), np.array((180.,255.,255.)))
roi_hist = cv2.calcHist([hsv_roi],[0],mask,[180],[0,180])
cv2.normalize(roi_hist,roi_hist,0,255,cv2.NORM_MINMAX)
# Setup the termination criteria, either 10 iteration or move by at least 1 pt
term_crit = ( cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 1 )while(1):ret, frame = cap.read()if ret == True:hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)dst = cv2.calcBackProject([hsv],[0],roi_hist,[0,180],1)# apply camshift to get the new locationret, track_window = cv2.CamShift(dst, track_window, term_crit)# Draw it on imagepts = cv2.boxPoints(ret)pts = np.int0(pts)img2 = cv2.polylines(frame,[pts],True, 255,2)k = cv2.waitKey(30) & 0xffif k == 27:breakelse:cv2.imshow('img2',img2)else:cap.release()cv2.destroyAllWindows()


光流
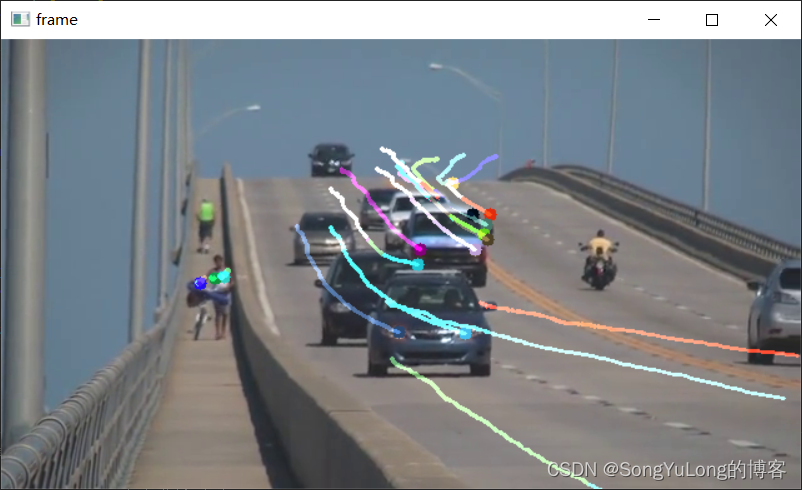
Lucas-Kanade Optical Flow
- 光流的概念以及 Lucas-Kanade 光流法
- 函数 cv2.calcOpticalFlowPyrLK() 对图像中的特征点进行跟踪
import numpy as np
import cv2cap = cv2.VideoCapture('./resource/opencv/video/slow_traffic_small.mp4')# params for Shi-Tomasi corner detection
feature_params = dict(maxCorners = 100,qualityLevel = 0.3,minDistance = 7,blockSize = 7)# parameters for lucas kanade optical flow
# maxLevel 为使用的图像金字塔层数
lk_params = dict(winSize = (15,15),maxLevel = 2,criteria = (cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 0.03))
# Create some random colors
color = np.random.randint(0, 255, (100, 3))# Take first frame and find corners in it
ret, old_frame = cap.read()
old_gray = cv2.cvtColor(old_frame, cv2.COLOR_BGR2GRAY)
p0 = cv2.goodFeaturesToTrack(old_gray, mask=None, **feature_params)# Create a mask image for drawing purposes
mask = np.zeros_like(old_frame)while(1):ret, frame = cap.read()frame_gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)# calculate optical flow 能够获取点的新位置p1, st, err = cv2.calcOpticalFlowPyrLK(old_gray, frame_gray, p0, None, **lk_params)# Select good pointsgood_new = p1[st==1]good_old = p0[st==1]# draw the tracksfor i,(new, old) in enumerate(zip(good_new, good_old)):a,b = new.ravel()c,d = old.ravel()mask = cv2.line(mask, (int(a), int(b)), (int(c), int(d)), color[i].tolist(), 2)frame = cv2.circle(frame, (int(a), int(b)), 5, color[i].tolist(), -1)img = cv2.add(frame, mask)cv2.imshow('frame', img)k = cv2.waitKey(30) & 0xFFif k == 27:breakold_gray = frame_gray.copy()p0 = good_new.reshape(-1, 1, 2)cv2.destroyAllWindows()
cap.release()
Dense Optical Flow
import numpy as np
import cv2 as cvcap = cv.VideoCapture('./resource/opencv/video/vtest.avi')
ret, frame1 = cap.read()
prvs = cv.cvtColor(frame1, cv.COLOR_BGR2GRAY)
hsv = np.zeros_like(frame1)
hsv[..., 1] = 255
while(1):ret, frame2 = cap.read()if not ret:print('No frames grabbed!')breaknext = cv.cvtColor(frame2, cv.COLOR_BGR2GRAY)flow = cv.calcOpticalFlowFarneback(prvs, next, None, 0.5, 3, 15, 3, 5, 1.2, 0)mag, ang = cv.cartToPolar(flow[..., 0], flow[..., 1])hsv[..., 0] = ang*180/np.pi/2hsv[..., 2] = cv.normalize(mag, None, 0, 255, cv.NORM_MINMAX)bgr = cv.cvtColor(hsv, cv.COLOR_HSV2BGR)cv.imshow('frame2', bgr)k = cv.waitKey(30) & 0xffif k == 27:breakelif k == ord('s'):cv.imwrite('./resource/opencv/video/opticalfb.png', frame2)cv.imwrite('./resource/opencv/video/opticalhsv.png', bgr)prvs = next
cv.destroyAllWindows()


相关文章:
OpenCV-Python中的图像处理-视频分析
OpenCV-Python中的图像处理-视频分析 视频分析Meanshift算法Camshift算法光流Lucas-Kanade Optical FlowDense Optical Flow 视频分析 学习使用 Meanshift 和 Camshift 算法在视频中找到并跟踪目标对象: Meanshift算法 Meanshift 算法的基本原理是和很简单的。假设我们有一堆…...
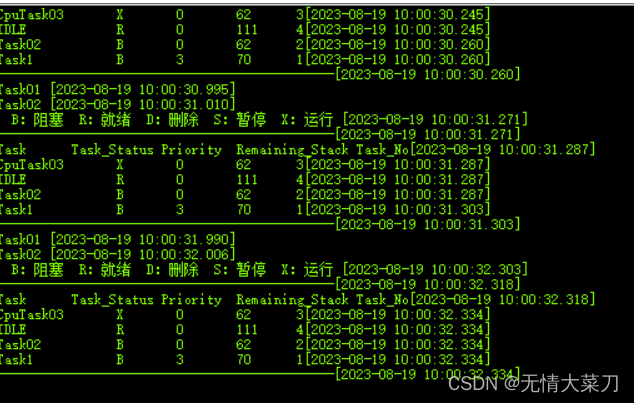
STM32 CubeMX (第四步Freertos内存管理和CPU使用率)
STM32 CubeMX STM32 CubeMX (第四步Freertos内存管理和CPU使用率) STM32 CubeMX一、STM32 CubeMX设置时钟配置HAL时基选择TIM1(不要选择滴答定时器;滴答定时器留给OS系统做时基)使用STM32 CubeMX 库,配置Fr…...

题解 | #1012.Equalize the Array# 2023杭电暑期多校10
1012.Equalize the Array 签到 题目大意 定义一个数组的 m o d e mode mode 是其中出现次数最多的数字(可不唯一) 给定一个数组 a a a ,每次操作可以选定其一个 m o d e mode mode 并使数组中所有与之相等的元素 1 1 1 问任意次操作后…...
)
UE4/5C++多线程插件制作(二十一、使用)
目录 DemoPawn.h DemoPawn.cpp 会出现的bug 插件 相关的插件制作在上一节已经完成了。 具体的使用方式在第0章已经写了,get之后去绑定即可。 而后笔者做了一个接口,具体的绑定方式也就在这个接口里面。 接下来最重要的是进行使用,对此我做了一个与蓝图相关的接口,里…...

【C#】关于?的用法
1、可空类型修饰符(?) 如: int? x null;//可空类型默认值都是null,而值类型如int默认值为0、bool默认值为false等 bool? result true;2、三目运算符(?:) 如: bool…...
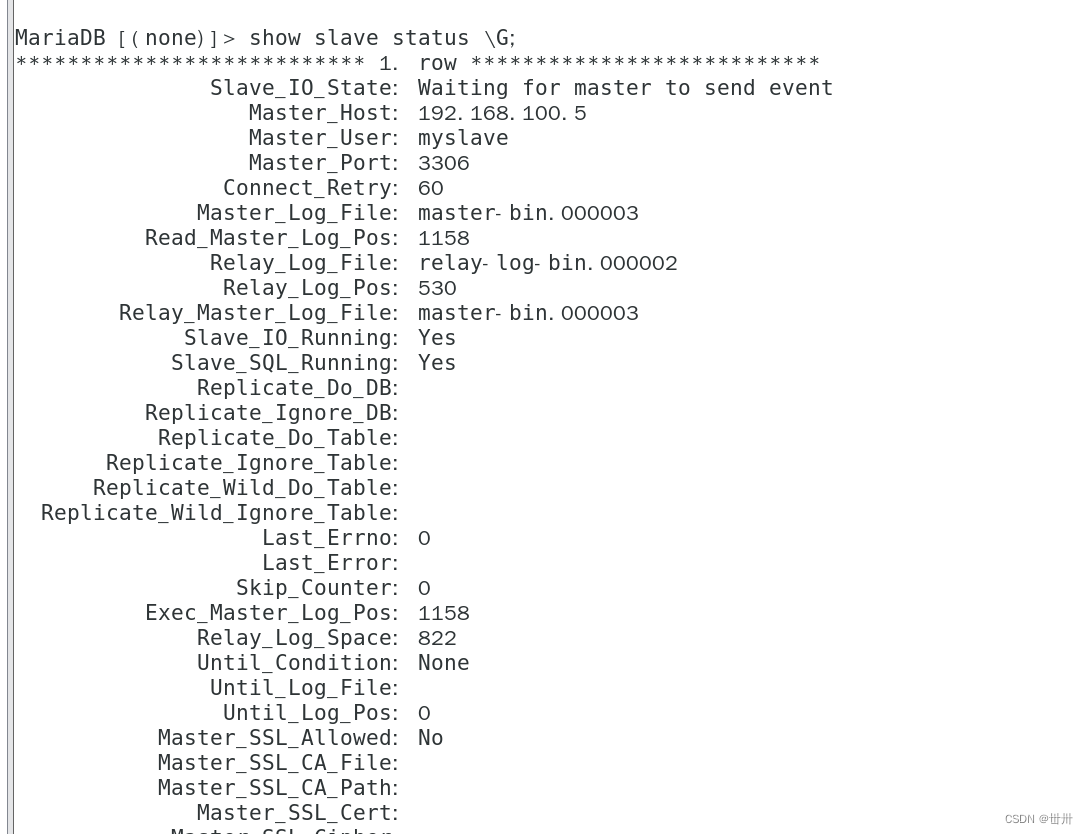
linux——mysql的高可用MHA
目录 一、概述 一、概念 二、组成 三、特点 四、工作原理 二、案例 三、构建MHA 一、基础环境 二、ssh免密登录 三、主从复制 master slave1 四、MHA安装 一、环境 二、安装node 三、安装manager 一、概述 一、概念 MHA(MasterHigh Availability&a…...

【学习日记】【FreeRTOS】空闲任务与阻塞延时
写在前面 本文是基于野火 RTOS 教程对空闲任务和阻塞延时的详解。 一、什么是任务中的阻塞延时 说到阻塞延时,笔者的第一反应就是在单片机的 while 循环中,使用一个 for 循环不断递减一个大数,通过 CPU 不断执行一条指令的耗时进行延时。这…...
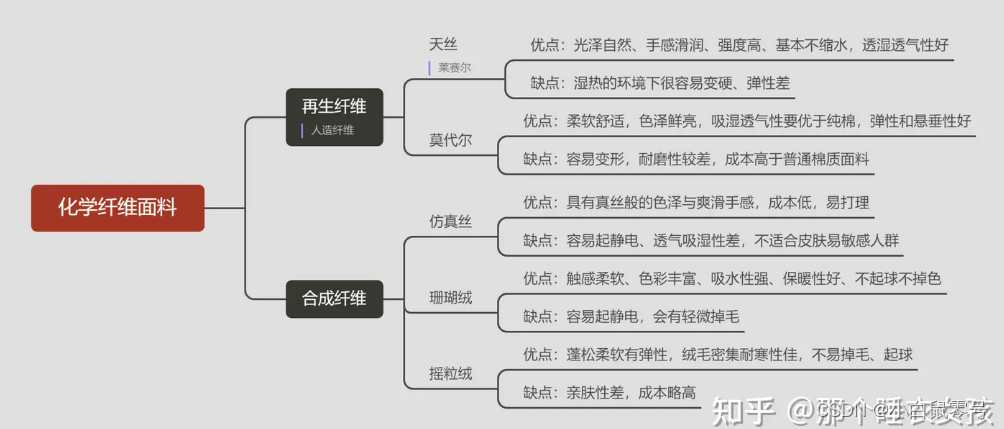
衣服材质等整理(时常更新)
参考文章&图片来源 https://zhuanlan.zhihu.com/p/390341736 00. 天然纤维 01. 化学纤维 02. 聚酯纤维(即,涤纶) 一种由有机二元酸和二元醇通过化学缩聚制成的合成纤维。具有出色的抗皱性和保形性,所制衣物在穿着过程中不容…...

电子商务环境下旅游价值链
迈克尔 ・ 波特(Michael E. Porter)在其《竞争优势》一书中提出了“价值链” 的概念,并认为一家企业最核心的竞争优势在于对价值链的设计。虽然迈克尔 ・ 波 特提出的价值链主要是针对企业内部的价值链,但他视价值链为一系列连续完成的 活动ÿ…...
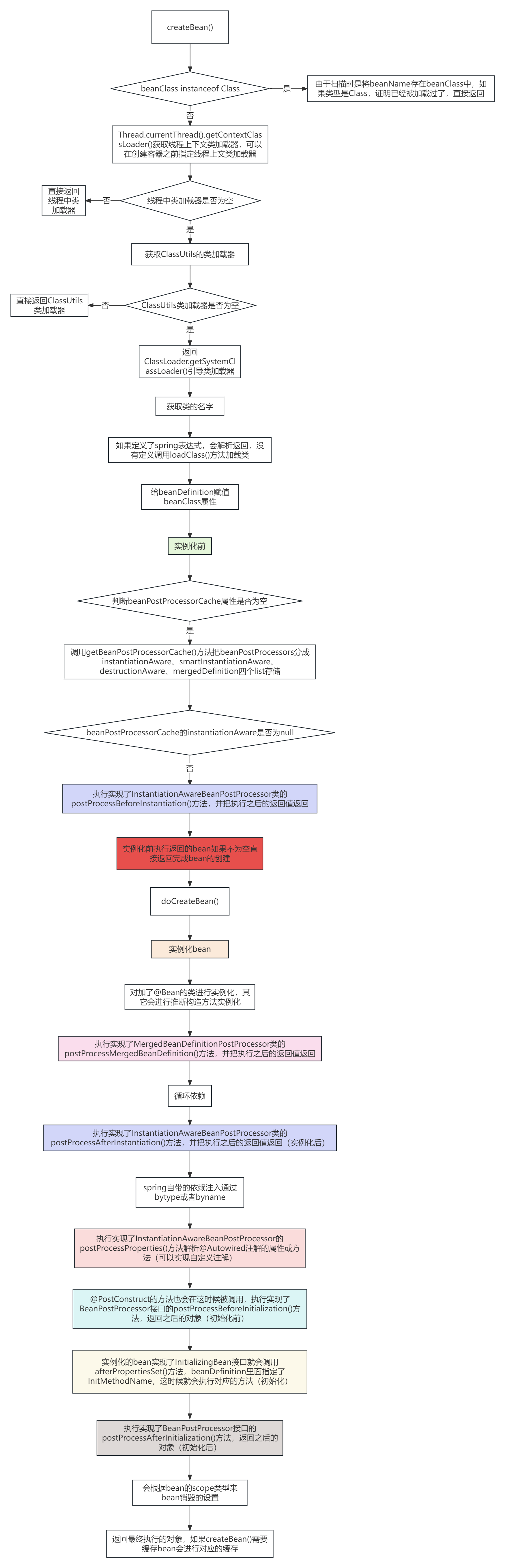
spring源码分析bean的生命周期(下)
doGetBean()执行过程 createBean()执行过程 一、DependsOn注解 spring创建对象之前会判断类上是否加了DependsOn注解,加了会遍历然后会添加到一个map中,spring会先创建DependsOn注解指定的类 二、spring类加载器 在合并BeanDefinition,确定…...

完美解决Github提交PR后报错:File is not gofumpt-ed (gofumpt)
问题阐述 最近在Github上提交PR后,遇到了这么一个问题:golangci-lint运行失败,具体原因是File is not gofumpt-ed (gofumpt)。 名词解释 golangci-lint: golangci-lint 是Go语言社区中常用的代码质量检查工具,它可以…...
pytorch3d成功安装
一、pytorch3d是什么? PyTorch3D的目标是帮助加速深度学习和3D交叉点的研究。3D数据比2D图像更复杂,在从事Mesh R-CNN和C3DPO等项目时,我们遇到了一些挑战,包括3D数据表示、批处理和速度。我们开发了许多有用的算子和抽象…...

【vue3】同个页面引入多个图表组件实现自适应的方法
首先说明,此方案仅针对vue3项目在同一个页面引入了多个图表组件,因为我发现不能框架不同的引入,resize的写法还不同 window.addEventListener("resize", function() {...// 在此处重新调用即可 }以下是具体写法: 循环…...

一文了解汽车芯片的分类及用途介绍
汽车芯片按其功能可分为控制类(MCU和AI芯片)、功率类、传感器和其他(如存储器)四种类型。市场基本被国际巨头所垄断。人们常说的汽车芯片是指汽车里的计算芯片,按集成规模可分为MCU芯片和AI芯片(SoC芯片&am…...
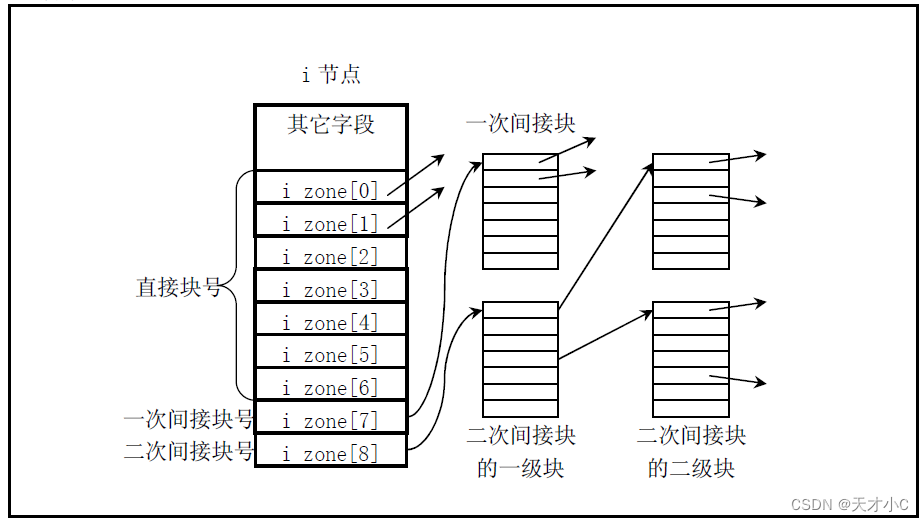
Linux0.11内核源码解析-truncate.c
truncate文件只要实现释放指定i节点在设备上占用的所有逻辑块,包括直接块、一次间接块、二次间接块。从而将文件节点对应的文件长度截为0,并释放占用的设备空间。 索引节点的逻辑块连接方式 释放一次间接块 static void free_ind(int dev,int block) {…...
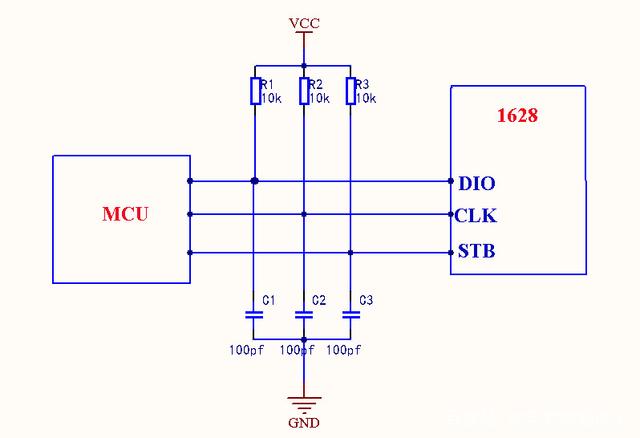
LED驱动型IC芯片的原理介绍
一、LED驱动器是什么 LED驱动器(LED Driver),是指驱动LED发光或LED模块组件正常工作的电源调整电子器件。由于LED PN结的导通特性决定,它能适应的电源电压和电流变动范围十分狭窄,稍许偏离就可能无法点亮LED或者发光效…...
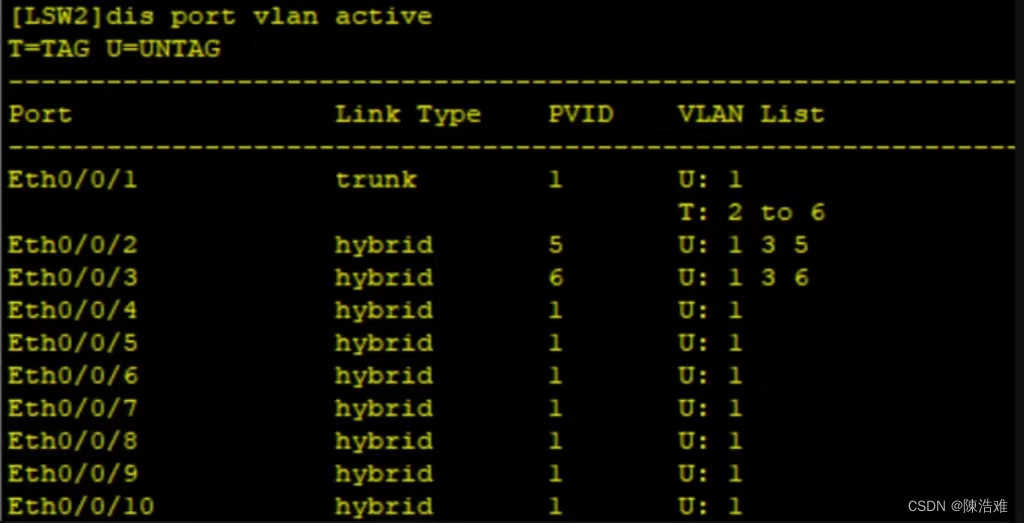
VLAN实验
实验题目如下: 实验拓扑如下: 实验要求如下: 【1】PC1/3的接口均为access模式,且属于van2,在同一网段 【2】PC2/4/5/6的IP地址在同一网段,与PC1/3不在同一网段 【3】PC2可以访问4/5/6,PC4不能…...
Qt应用开发(基础篇)——高级纯文本窗口 QPlainTextEdit
一、前言 QPlainTextEdit类继承于QAbstractScrollArea,QAbstractScrollArea继承于QFrame,是Qt用来显示和编辑纯文本的窗口。 滚屏区域基类https://blog.csdn.net/u014491932/article/details/132245486?spm1001.2014.3001.5501框架类QFramehttps://blo…...

三维可视化平台有哪些?Sovit3D可视化平台怎么样?
随着社会经济的发展和数字技术的进步,互联网行业发展迅速。为了适应新时代社会发展的需要,大数据在这个社会经济发展过程中随着技术的进步而显得尤为重要。同时,大数据技术的快速发展进程也推动了可视化技术的飞速发展,国内外各类…...

Xxl-job安装部署以及SpringBoot集成Xxl-job使用
1、安装Xxl-job: 可以使用docker拉取镜像部署和源码编译两种方式,这里选择源码编译安装。 代码拉取地址: https://github.com/xuxueli/xxl-job/tree/2.1.2 官方开发文档: https://www.xuxueli.com/xxl-job/#%E3%80%8A%E5%88%…...

利用最小二乘法找圆心和半径
#include <iostream> #include <vector> #include <cmath> #include <Eigen/Dense> // 需安装Eigen库用于矩阵运算 // 定义点结构 struct Point { double x, y; Point(double x_, double y_) : x(x_), y(y_) {} }; // 最小二乘法求圆心和半径 …...

内存分配函数malloc kmalloc vmalloc
内存分配函数malloc kmalloc vmalloc malloc实现步骤: 1)请求大小调整:首先,malloc 需要调整用户请求的大小,以适应内部数据结构(例如,可能需要存储额外的元数据)。通常,这包括对齐调整,确保分配的内存地址满足特定硬件要求(如对齐到8字节或16字节边界)。 2)空闲…...

Linux链表操作全解析
Linux C语言链表深度解析与实战技巧 一、链表基础概念与内核链表优势1.1 为什么使用链表?1.2 Linux 内核链表与用户态链表的区别 二、内核链表结构与宏解析常用宏/函数 三、内核链表的优点四、用户态链表示例五、双向循环链表在内核中的实现优势5.1 插入效率5.2 安全…...

应用升级/灾备测试时使用guarantee 闪回点迅速回退
1.场景 应用要升级,当升级失败时,数据库回退到升级前. 要测试系统,测试完成后,数据库要回退到测试前。 相对于RMAN恢复需要很长时间, 数据库闪回只需要几分钟。 2.技术实现 数据库设置 2个db_recovery参数 创建guarantee闪回点,不需要开启数据库闪回。…...
Redis相关知识总结(缓存雪崩,缓存穿透,缓存击穿,Redis实现分布式锁,如何保持数据库和缓存一致)
文章目录 1.什么是Redis?2.为什么要使用redis作为mysql的缓存?3.什么是缓存雪崩、缓存穿透、缓存击穿?3.1缓存雪崩3.1.1 大量缓存同时过期3.1.2 Redis宕机 3.2 缓存击穿3.3 缓存穿透3.4 总结 4. 数据库和缓存如何保持一致性5. Redis实现分布式…...

2024年赣州旅游投资集团社会招聘笔试真
2024年赣州旅游投资集团社会招聘笔试真 题 ( 满 分 1 0 0 分 时 间 1 2 0 分 钟 ) 一、单选题(每题只有一个正确答案,答错、不答或多答均不得分) 1.纪要的特点不包括()。 A.概括重点 B.指导传达 C. 客观纪实 D.有言必录 【答案】: D 2.1864年,()预言了电磁波的存在,并指出…...

linux 下常用变更-8
1、删除普通用户 查询用户初始UID和GIDls -l /home/ ###家目录中查看UID cat /etc/group ###此文件查看GID删除用户1.编辑文件 /etc/passwd 找到对应的行,YW343:x:0:0::/home/YW343:/bin/bash 2.将标红的位置修改为用户对应初始UID和GID: YW3…...

Spring Boot+Neo4j知识图谱实战:3步搭建智能关系网络!
一、引言 在数据驱动的背景下,知识图谱凭借其高效的信息组织能力,正逐步成为各行业应用的关键技术。本文聚焦 Spring Boot与Neo4j图数据库的技术结合,探讨知识图谱开发的实现细节,帮助读者掌握该技术栈在实际项目中的落地方法。 …...
MySQL 知识小结(一)
一、my.cnf配置详解 我们知道安装MySQL有两种方式来安装咱们的MySQL数据库,分别是二进制安装编译数据库或者使用三方yum来进行安装,第三方yum的安装相对于二进制压缩包的安装更快捷,但是文件存放起来数据比较冗余,用二进制能够更好管理咱们M…...

Unity UGUI Button事件流程
场景结构 测试代码 public class TestBtn : MonoBehaviour {void Start(){var btn GetComponent<Button>();btn.onClick.AddListener(OnClick);}private void OnClick(){Debug.Log("666");}}当添加事件时 // 实例化一个ButtonClickedEvent的事件 [Formerl…...