基于X86六轮差速移动机器人运动控制器设计与实现(一)软件与硬件架构








相关文章:
基于X86六轮差速移动机器人运动控制器设计与实现(一)软件与硬件架构
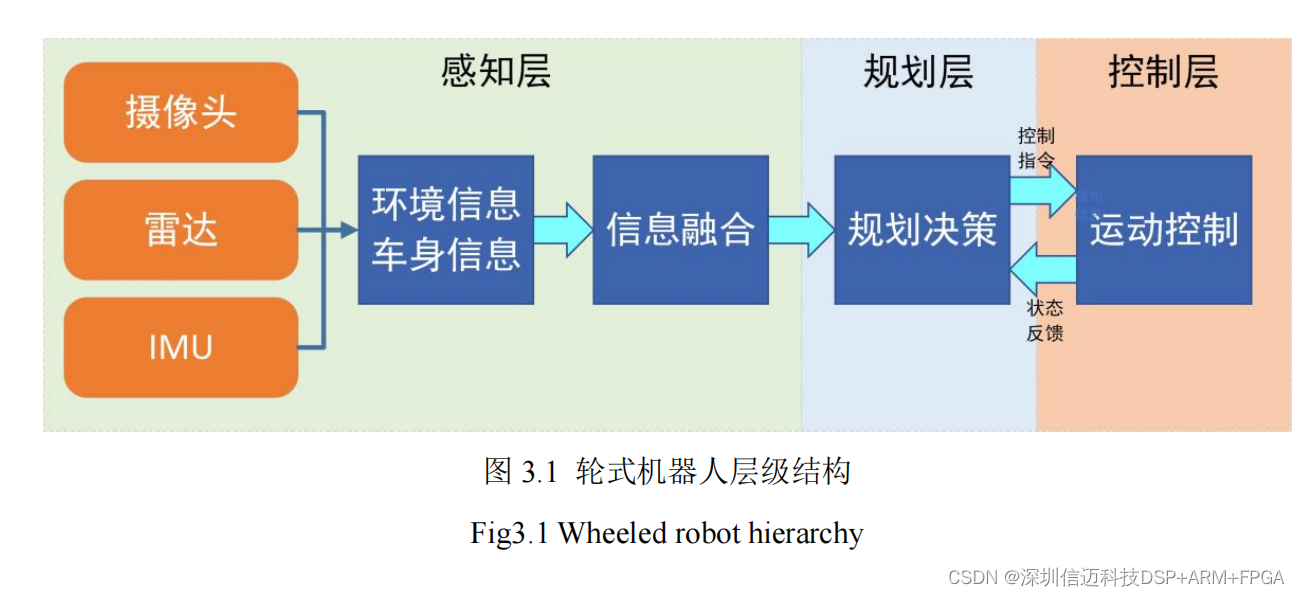
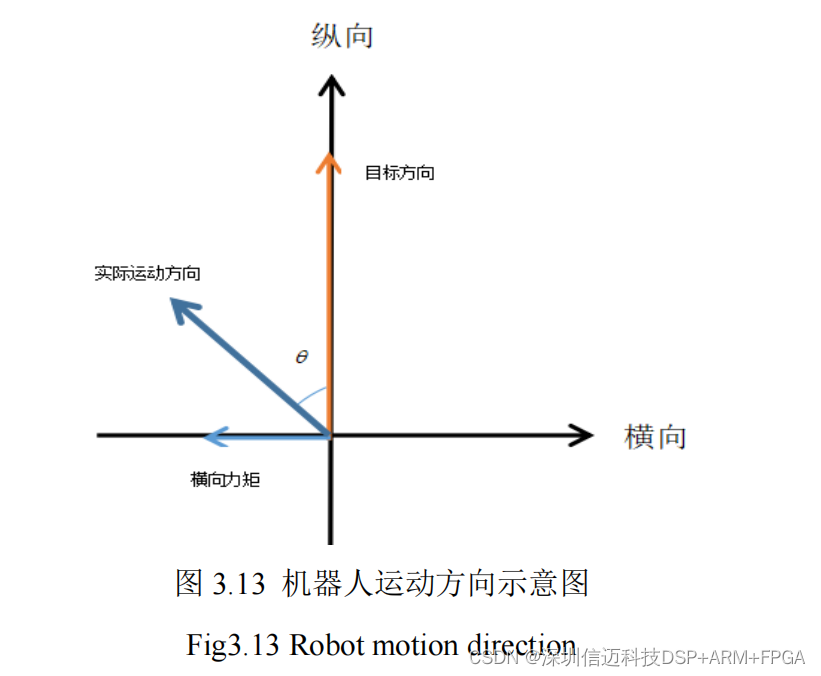
本文研究的六轮差速移动机器人 (Six-Wheeled Differential Mobile Robot , SWDMR) 为了满足资源站到资源站点对点的物资运输,对机器人的跨越障碍能力 有较高的要求。对比传统的四轮移动机器人,六轮移动机器人能够提供更强的驱动 力&#…...

单片机之从C语言基础到专家编程 - 4 C语言基础 - 4.9 变量与常量
基本数据类型可以作为变量与常量使用,顾名思义,变量运行时可以改变其值,常量运行时不会改变其值。 常量分为整型常量、浮点型常量、字符常量、字符串常量和符号常量。 通常用#define来定义一个标识符来表示一个常量 用type name 常量来定义一个变量,…...

如何在 3dmax 中渲染? 3dmax渲染教程
3D Max是一款专业的3D计算机设计软件,用于创建3D动画、游戏、模型、图像等,在视频游戏开发商、电影和电视工作室的工作中发挥着重要作用。渲染是 3D max 建模的一个非常重要的部分。在渲染中,通过设置渲染选项的一些参数,我们可以…...

linux部署项目, 报数据库连接不上错误
问题描述: sprinboot项目, 本地连线上数据库可以使用, springboot项目中java包的版本是8.0, 线上数据库是5.7, 但在将项目部署到服务器上的时候发现项目启动报错, 于是寻找问题, 发现是useSSLtrue导致的 出问题前的链接地址: url: jdbc:mysql://localhost:3306/ja…...
现有的vue3+ts+vite项目集成electron
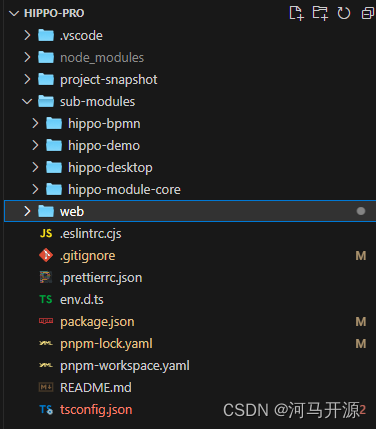
效果图 什么时Electron Electron是使用JavaScript,HTML和CSS构建跨平台的桌面应用程序框架。 Electron兼容Mac、Windows和Linux,可以构建出三个平台的应用程序。 现有的vue3项目集成Electron 安装依赖 原来有一个vue3+ts+vite+pnpm的项目,其中sub-modules是子项目,web是…...
线性代数的学习和整理8: 方阵和行列式相关(草稿-----未完成)
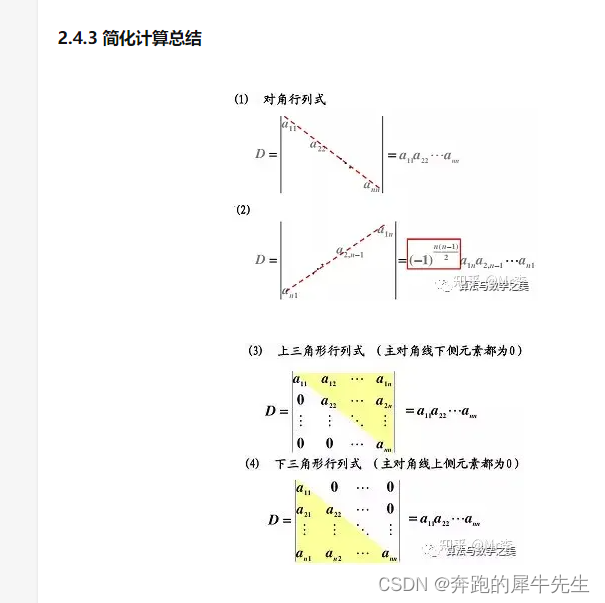
1.4.1 方阵 矩阵里,行数列数的矩阵叫做方阵方阵有很多很好的特殊属性 1.4.2 行列式 行列式是方阵的一种特殊运算如果矩阵行数列数相等,那么这个矩阵是方阵。行列数的计算方式和矩阵的不同只有方阵才有行列式行列式其实是,矩阵变化的一个面…...

Ubuntu vi 左下角没有提示
1 打开终端,输入以下命令 sudo gedit /etc/vim/vimrc.tiny 2 进入文件后,修改 set compatible 为set nocompatible,如下所示: " Vim configuration file, in effect when invoked as "vi". The aim of this "…...
Windows安装 Elasticsearch 教程
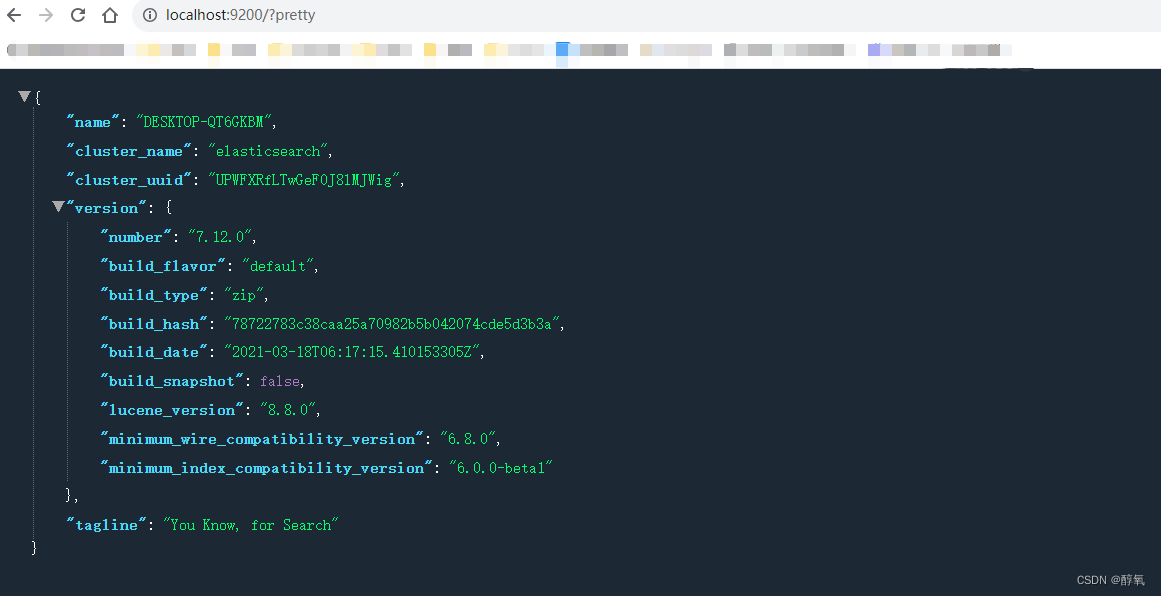
下载地址 Past Releases of Elastic Stack Software | Elastic 解压 解压完的样子 进入BIN目录 D:\Develop\elasticsearch\elasticsearch-7.12.0\bin 按住shift 鼠标右键 打开 powershell 窗口 查看ES版本 .\elasticsearch.bat --version 出现问题了 警告:不赞成…...

Dubbo 融合 Nacos 成为注册中心
快速上手 Dubbo 融合 Nacos 成为注册中心的操作步骤非常简单,大致步骤可分为“增加 Maven 依赖”以及“配置注册中心“。 增加 Maven 依赖 只需要依赖Dubbo客户端即可,关于推荐的使用版本,请参考Dubbo官方文档或者咨询Dubbo开发人员&#…...
kafka--kafka基础概念-ISR详解
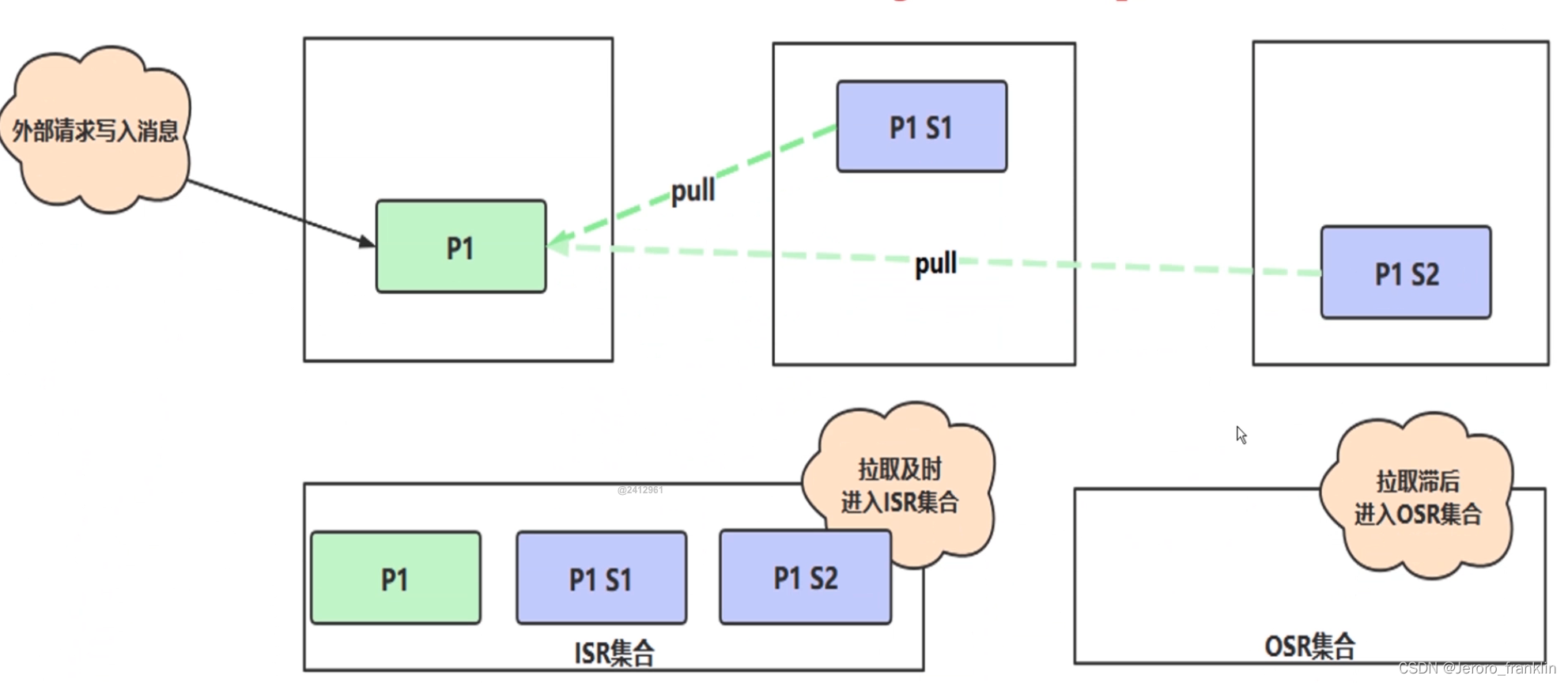
kafka基础概念-ISR详解 主要是讲 主 往 从同步中的问题 当绿色P1接收到写入的数据,要同步到紫色的P1S1和P1S2 如何保证一致性呢? 使用In Sync Replicas 也就是ISR概念 为什么不一致的? 因为P1S1同步数据 可能花费 50ms P1S2可能花费60ms…...

《Kubernetes部署篇:Ubuntu20.04基于外部etcd+部署kubernetes1.24.16集群(多主多从)》
一、架构图 如下图所示: 二、环境信息 1、部署规划 主机名K8S版本系统版本内核版本IP地址备注k8s-master-631.24.16Ubuntu 20.04.5 LTS5.15.0-69-generic192.168.1.63master节点 + etcd节点k8s-master-641.24.16Ubuntu 20.04.5 LTS5.15.0-69-generic192.168.1.64master节点 + …...

音频解码及如何在Java实现
本人并不干这个,但是被迫下水了解了一下这个,稍微做了一下整理。再就是感觉现在网上以及ChatGPT在这方面给出的答案太水了,在此开辟一篇。无意放出代码,这里只介绍一些可能重要的点。 本来以为有了ChatGPT写这些就没有必要了&…...

Webshell 及检测绕过
webshell 概念 web指的是在web服务器上,而shell是用脚本语言编写的脚本程序,WebShell是一种用来进行网站和服务器管理的脚本程序,webshell一般是被网站管理员用于网站管理、服务器管理等等一些用途,但是由于webshell的功能比较强大࿰…...

Ubuntu22.4系统mongodb数据库安装
Ubuntu22.4系统mongodb数据库安装 1、打开终端并运行以下命令,以导入 MongoDB GPG 密钥: wget -qO - https://www.mongodb.org/static/pgp/server-5.0.asc | sudo apt-key add -2、添加 MongoDB 仓库到你的系统。根据你的 Ubuntu 版本,选择…...
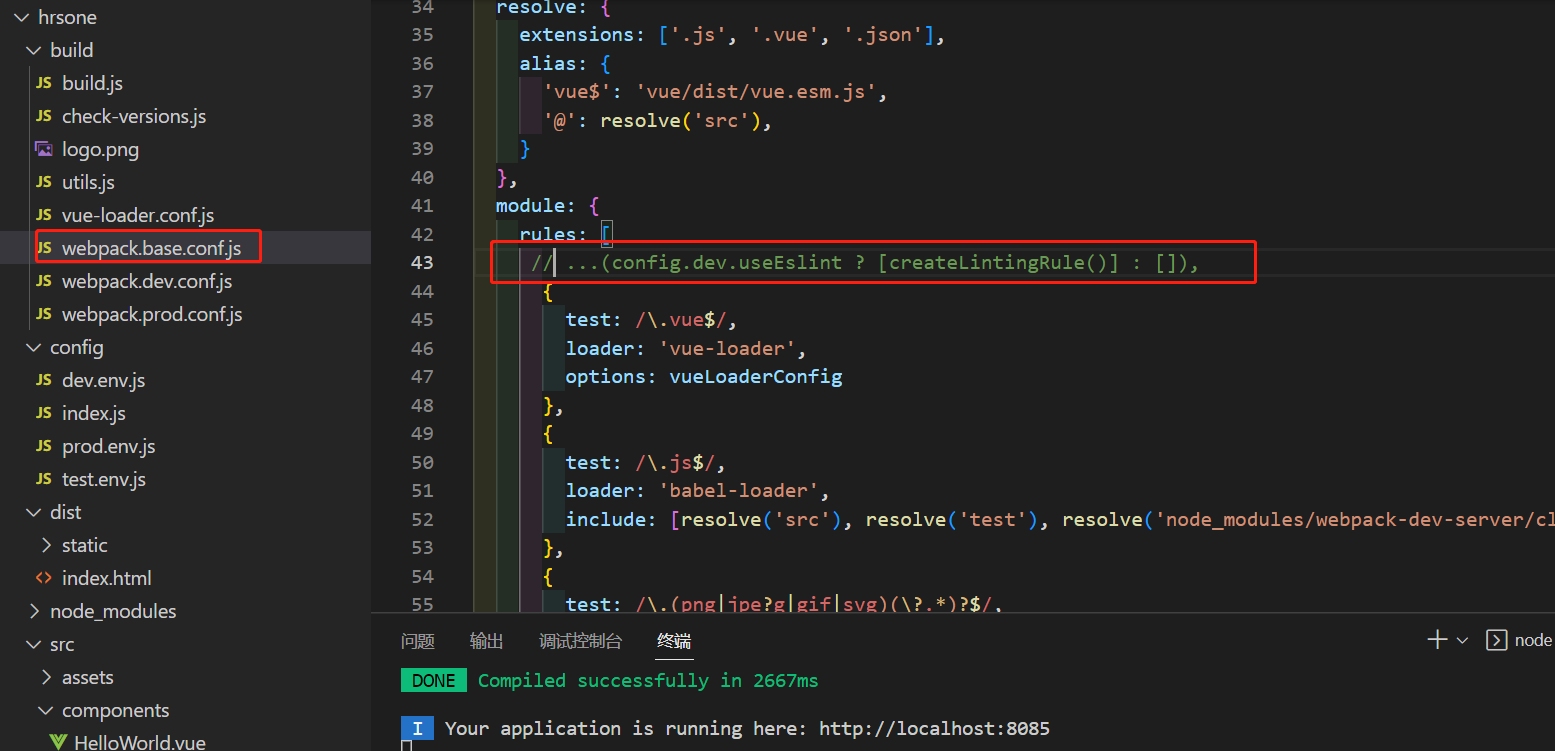
Vue初识别--环境搭建--前置配置过程
问题一: 在浏览器上的扩展程序上添加了vue-devtools后不生效: 解决方式:打开刚加入的扩展工具Vue.js devtools的允许访问文件地址设置 问题二:Vue新建一个项目 创建一个空文件夹hrsone,然后在VSCode中打开这个空文件夹…...

数据在内存中的储存·大小端(文字+画图详解)(c语言·超详细入门必看)
前言:Hello,大家好,我是心跳sy😘,本节我们介绍c语言的两种基本的内置数据类型:数值类型和字符类型在内存中的储存方法,并对大小端进行详细介绍(附两种大小端判断方法)&am…...

Word怎么转换成PDF文档?多个Word转换成PDF步骤分享
word文档是一种非常好用的文件格式,可以帮助用户们很好的保存图片和文字内容,不过并不是只有word这一种文档类文件格式,还有一种pdf文档也深受用户们的欢迎,在工作或者学习过程中这两种文档是可以互相转换格式的,那么W…...
【C++习题集】-- 堆
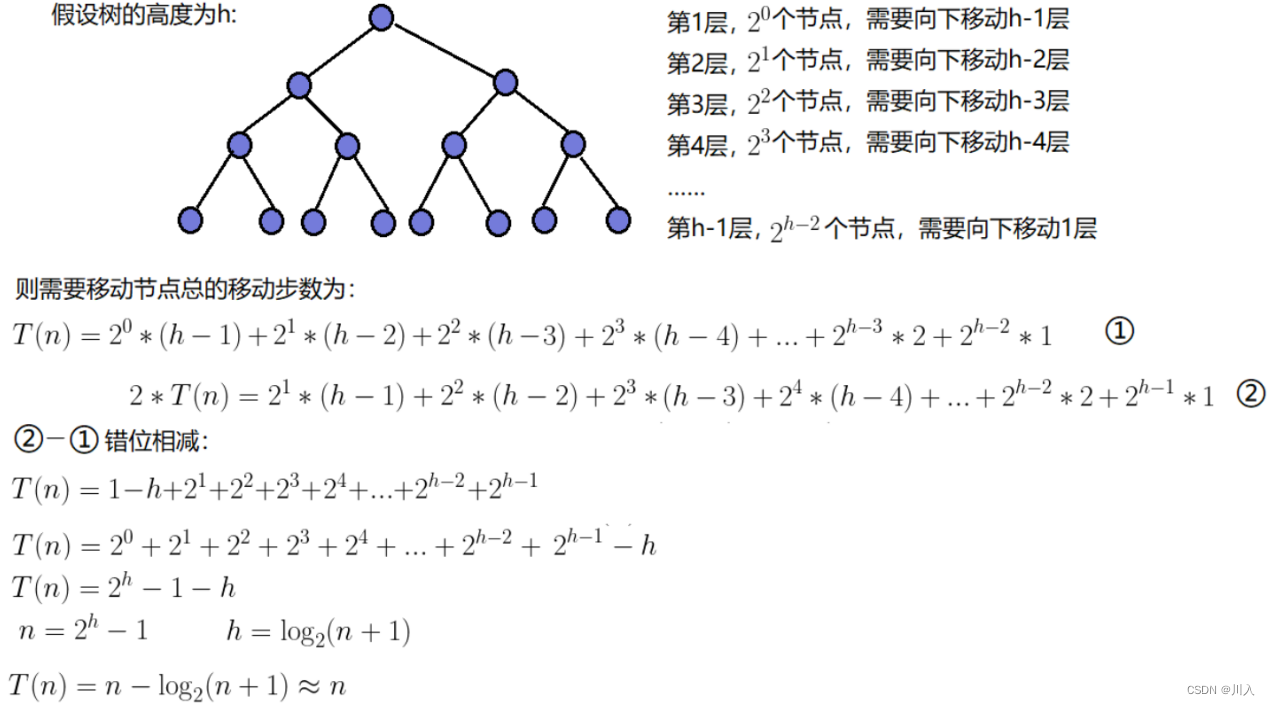
(用于复习) 目录 树概念及结构 名词概念 二叉树概念及结构 特殊的二叉树 满二叉树 完全二叉树 运算性质 二叉树存储结构 顺序存储 链式存储 堆 - 顺序存储 堆的性质 堆的实现 堆的应用 堆排序 直接建堆法 树概念及结构 概念:…...

vue + vue-office 实现多种文件(docx、excel、pdf)的预览
支持多种文件( docx、excel、pdf)预览的vue组件库,支持vue2/3。也支持非Vue框架的预览。 github: 《仓库地址》 演 示: 《演示效果》 功能特色 一站式:提供docx、pdf、excel多种文档的在线预览方案,有它就够了简单:…...

30.Netty源码服务端启动主要流程
highlight: arduino-light 服务端启动主要流程 •创建 selector •创建 server socket channel •初始化 server socket channel •给 server socket channel 从 boss group 中选择一个 NioEventLoop •将 server socket channel 注册到选择的 NioEventLoop 的 selector •…...

XCTF-web-easyupload
试了试php,php7,pht,phtml等,都没有用 尝试.user.ini 抓包修改将.user.ini修改为jpg图片 在上传一个123.jpg 用蚁剑连接,得到flag...

Java如何权衡是使用无序的数组还是有序的数组
在 Java 中,选择有序数组还是无序数组取决于具体场景的性能需求与操作特点。以下是关键权衡因素及决策指南: ⚖️ 核心权衡维度 维度有序数组无序数组查询性能二分查找 O(log n) ✅线性扫描 O(n) ❌插入/删除需移位维护顺序 O(n) ❌直接操作尾部 O(1) ✅内存开销与无序数组相…...

鸿蒙中用HarmonyOS SDK应用服务 HarmonyOS5开发一个医院查看报告小程序
一、开发环境准备 工具安装: 下载安装DevEco Studio 4.0(支持HarmonyOS 5)配置HarmonyOS SDK 5.0确保Node.js版本≥14 项目初始化: ohpm init harmony/hospital-report-app 二、核心功能模块实现 1. 报告列表…...

汇编常见指令
汇编常见指令 一、数据传送指令 指令功能示例说明MOV数据传送MOV EAX, 10将立即数 10 送入 EAXMOV [EBX], EAX将 EAX 值存入 EBX 指向的内存LEA加载有效地址LEA EAX, [EBX4]将 EBX4 的地址存入 EAX(不访问内存)XCHG交换数据XCHG EAX, EBX交换 EAX 和 EB…...

算法笔记2
1.字符串拼接最好用StringBuilder,不用String 2.创建List<>类型的数组并创建内存 List arr[] new ArrayList[26]; Arrays.setAll(arr, i -> new ArrayList<>()); 3.去掉首尾空格...

华硕a豆14 Air香氛版,美学与科技的馨香融合
在快节奏的现代生活中,我们渴望一个能激发创想、愉悦感官的工作与生活伙伴,它不仅是冰冷的科技工具,更能触动我们内心深处的细腻情感。正是在这样的期许下,华硕a豆14 Air香氛版翩然而至,它以一种前所未有的方式&#x…...

深入理解Optional:处理空指针异常
1. 使用Optional处理可能为空的集合 在Java开发中,集合判空是一个常见但容易出错的场景。传统方式虽然可行,但存在一些潜在问题: // 传统判空方式 if (!CollectionUtils.isEmpty(userInfoList)) {for (UserInfo userInfo : userInfoList) {…...
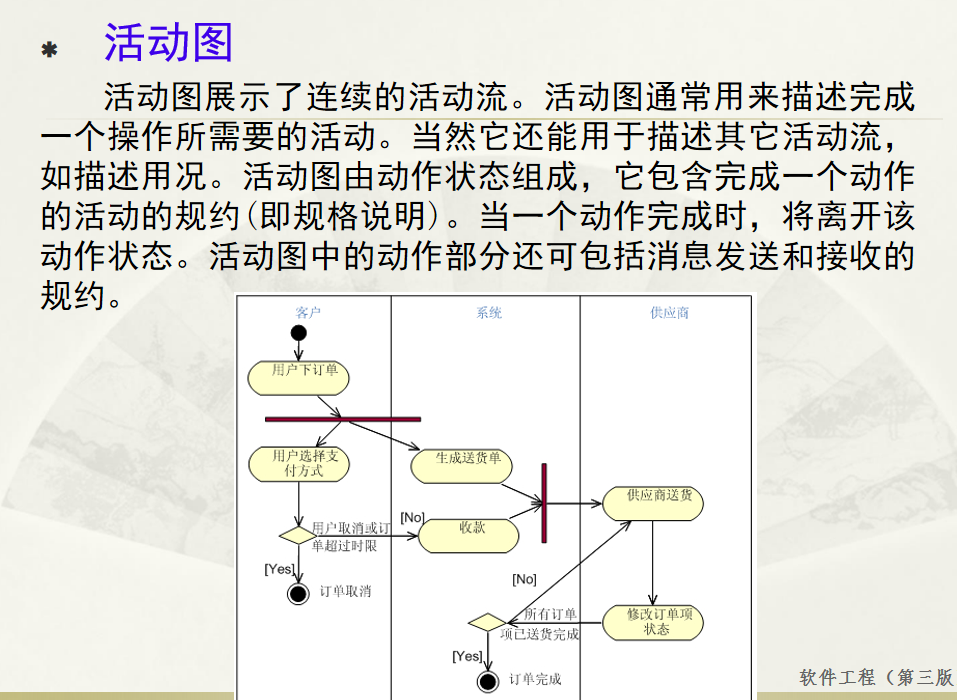
软件工程 期末复习
瀑布模型:计划 螺旋模型:风险低 原型模型: 用户反馈 喷泉模型:代码复用 高内聚 低耦合:模块内部功能紧密 模块之间依赖程度小 高内聚:指的是一个模块内部的功能应该紧密相关。换句话说,一个模块应当只实现单一的功能…...

【版本控制】GitHub Desktop 入门教程与开源协作全流程解析
目录 0 引言1 GitHub Desktop 入门教程1.1 安装与基础配置1.2 核心功能使用指南仓库管理日常开发流程分支管理 2 GitHub 开源协作流程详解2.1 Fork & Pull Request 模型2.2 完整协作流程步骤步骤 1: Fork(创建个人副本)步骤 2: Clone(克隆…...

LTR-381RGB-01RGB+环境光检测应用场景及客户类型主要有哪些?
RGB环境光检测 功能,在应用场景及客户类型: 1. 可应用的儿童玩具类型 (1) 智能互动玩具 功能:通过检测环境光或物体颜色触发互动(如颜色识别积木、光感音乐盒)。 客户参考: LEGO(乐高&#x…...