PY32F003F18之RS485通讯
PY32F003F18将USART2连接到RS485芯片,和其它RS485设备实现串口接收后再转发的功能。
一、测试电路
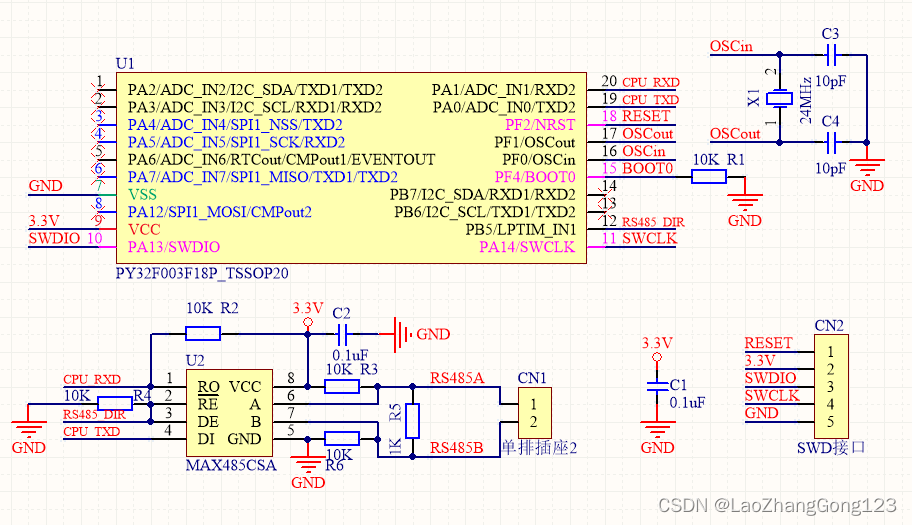
二、测试程序
#include "USART2.h"
#include "stdio.h" //getchar(),putchar(),scanf(),printf(),puts(),gets(),sprintf()
#include "string.h" //使能strcpy(),strlen(),memset()
#include "delay.h"
#include "MyUSART.h"//PA0 ------> USART2_TX
//PA1 ------> USART2_RXuint8_t USART2_TX_Buffer[USART2_TX_Buffer_Size]; //USART2发送缓冲区数组;
uint8_t USART2_TX_Buffer_Send_Index=0; //USART2_TX_Buffer[]的发送索引值;
uint8_t USART2_TX_Buffer_Load_Index=0; //USART2_TX_Buffer[]的装载索引值
uint8_t USART2_TX_Completed_Flag;
uint8_t USART2_TX_Overtime_Conter;//USART2发送超时计数器uint8_t USART2_RX_Buffer[USART2_RX_Buffer_Size]; //USART2接收缓冲区数组
uint8_t USART2_RX_Buffer_Load_Index; //USART2_RX_Buffer[]的装载索引值
uint8_t USART2_RX_Time_Count; //USART2接收时间计数器
uint8_t USART2_RX_Completed_Flag;void USART2_GPIO_Config(void);
void USART2_NVIC_Cpnfig(void);
void USART2_Mode_Config(uint32_t baudrate);
void USART2_Init(uint32_t baudrate);
void USART2_Load_Send_Data(void);void RS485_Enable_Output_Init(void)
{GPIO_InitTypeDef GPIO_InitStructure;__HAL_RCC_GPIOB_CLK_ENABLE();//使能GPIOB时钟//初始化GPIOB5GPIO_InitStructure.Pin = GPIO_PIN_5; //选择第5脚GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_PP; //设置引脚工作模式为推挽输出方式GPIO_InitStructure.Pull = GPIO_PULLUP; //配置引脚使能上拉GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_VERY_HIGH; //配置GPIO速度为极高HAL_GPIO_Init(GPIOB, &GPIO_InitStructure);//根据GPIO_InitStructure结构变量指定的参数初始化GPIOB的外设寄存器RS485_ENABLE_PIN_Output_High();
}//函数功能:USART2的IO口配置,PA0是为USART2_TX,PA1是USART2_RX
void USART2_GPIO_Config(void)
{GPIO_InitTypeDef GPIO_InitStructureure;__HAL_RCC_USART2_CLK_ENABLE();//使能USART2外设时钟__HAL_RCC_GPIOA_CLK_ENABLE(); //使能GPIOA时钟GPIO_InitStructureure.Pin = GPIO_PIN_0; //选择第0脚,PA0是为USART2_TXGPIO_InitStructureure.Mode = GPIO_MODE_AF_PP; //复用功能推挽模式GPIO_InitStructureure.Pull = GPIO_PULLUP; //引脚上拉被激活GPIO_InitStructureure.Speed = GPIO_SPEED_FREQ_VERY_HIGH; //引脚速度为最高速GPIO_InitStructureure.Alternate = GPIO_AF9_USART2; //将引脚复用为USART2HAL_GPIO_Init(GPIOA, &GPIO_InitStructureure);//根据GPIO_InitStructureure结构变量指定的参数初始化GPIOA的外设寄存器//将PA0初始化为USART2_TXGPIO_InitStructureure.Pin = GPIO_PIN_1; //选择第1脚,PA1是USART2_RXGPIO_InitStructureure.Mode = GPIO_MODE_AF_PP; //复用功能推挽模式GPIO_InitStructureure.Pull = GPIO_PULLUP; //引脚上拉被激活GPIO_InitStructureure.Speed = GPIO_SPEED_FREQ_VERY_HIGH; //引脚速度为最高速GPIO_InitStructureure.Alternate = GPIO_AF9_USART2; //将引脚复用为USART2HAL_GPIO_Init(GPIOA, &GPIO_InitStructureure);//根据GPIO_InitStructureure结构变量指定的参数初始化GPIOA的外设寄存器//将PA1初始化为USART2_RX
}//函数功能:设置串口2中断优先级为0x01
void USART2_NVIC_Cpnfig(void)
{HAL_NVIC_SetPriority(USART2_IRQn, 0x01, 0);//设置串口2中断优先级为0x01,0无意义.USART2_IRQn表示中断源为串口2
}//函数功能:波特率为115200,数字为8位,停止位为1位,无奇偶校验,允许发送和接收数据,允许接收和发送中断,并使能串口
void USART2_Mode_Config(uint32_t baudrate)
{UART_HandleTypeDef UART_HandleStructureure;HAL_StatusTypeDef retData;__HAL_RCC_USART2_CLK_ENABLE();//使能USART2外设时钟UART_HandleStructureure.Instance = USART2; //接口为USART2UART_HandleStructureure.Init.BaudRate = baudrate; //波特率为115200bpsUART_HandleStructureure.Init.WordLength = UART_WORDLENGTH_8B; //串口字长度为8UART_HandleStructureure.Init.StopBits = UART_STOPBITS_1; //串口停止位为1位UART_HandleStructureure.Init.Parity = UART_PARITY_NONE; //串口无需奇偶校验UART_HandleStructureure.Init.HwFlowCtl = UART_HWCONTROL_NONE; //串口无硬件流程控制UART_HandleStructureure.Init.Mode = UART_MODE_TX_RX; //串口工作模式为发送和接收模式retData=HAL_UART_Init(&UART_HandleStructureure);//根据UART_HandleStructureure型结构初始化USART2if ( retData!= HAL_OK)//串口初始化失败{}
//USART_ITConfig(USART2,UART_IT_PE,ENABLE);
// __HAL_UART_ENABLE_IT(&UART_HandleStructureure, UART_IT_PE);
// //串口接收数据时,使能奇偶校验错误时产生中断,Enable the UART Parity Error Interrup// USART_ITConfig(USART2,UART_IT_ERR,ENABLE);
// __HAL_UART_ENABLE_IT(&UART_HandleStructureure, UART_IT_ERR);
// //串口接收数据时,使能帧错误、噪音错误和溢出错误时产生中断
// //Enable the UART Error Interrupt: (Frame error, noise error, overrun error)USART_ITConfig(USART2,UART_IT_RXNE,ENABLE);
// __HAL_UART_ENABLE_IT(&UART_HandleStructureure, UART_IT_RXNE);开启串口接收中断//串口接收数据时,使能"接收数据寄存器不为空"则产生中断(位RXNE=1)//Enable the UART Data Register not empty Interrupt/在串口中断服务函数中发送数据配置开始//
// USART_ITConfig(USART2,UART_IT_TXE,ENABLE);
// __HAL_UART_ENABLE_IT(&UART_HandleStructureure, UART_IT_TXE);//串口发送数据时,使能"串口发送数据寄存器为空"产生中断(位TXE=1)//Enable the UART Transmit data register empty InterruptUSART_ITConfig(USART2,UART_IT_TXE,DISABLE);
// __HAL_UART_DISABLE_IT(&UART_HandleStructureure, UART_IT_TXE);//串口发送数据时,不使能"串口发送数据寄存器为空"产生中断(位TXE=0)//Disable the UART Transmit Complete Interrupt// USART_ITConfig(USART2,UART_IT_TC,ENABLE);
// __HAL_UART_ENABLE_IT(&UART_HandleStructureure, UART_IT_TC);//串口发送数据时,使能"串口发送完成"产生中断(位TC=1)//Enable the UART Transmit Complete InterruptUSART_ITConfig(USART2,UART_IT_TC,DISABLE);
// __HAL_UART_DISABLE_IT(&UART_HandleStructureure,UART_IT_TC);//串口发送数据时,不使能"串口发送完成"产生中断(位TC=1)
/在串口中断服务函数中发送数据配置结束//HAL_NVIC_EnableIRQ(USART2_IRQn);//使能串口2中断//USART2_IRQn表示中断源为串口2
}//函数功能:
//波特率为115200,数字为8位,停止位为1位,无奇偶校验
//自动波特率配置模式
//允许发送和接收数据,允许接收和发送中断,并使能串口
void My_USART2_Mode_Config(uint32_t baudrate)
{UART_InitTypeDef UART_InitStructureure;UART_AdvFeatureInitTypeDef AdvancedInit_Structureure;__HAL_RCC_USART2_CLK_ENABLE();//使能USART2外设时钟UART_InitStructureure.BaudRate = baudrate; //波特率为115200bpsUART_InitStructureure.WordLength = UART_WORDLENGTH_8B; //串口字长度为8UART_InitStructureure.StopBits = UART_STOPBITS_1; //串口停止位为1位UART_InitStructureure.Parity = UART_PARITY_NONE; //串口无需奇偶校验UART_InitStructureure.HwFlowCtl = UART_HWCONTROL_NONE; //串口无硬件流程控制UART_InitStructureure.Mode = UART_MODE_TX_RX; //串口工作模式为发送和接收模式AdvancedInit_Structureure.AdvFeatureInit=UART_ADVFEATURE_NO_INIT;//不使用自动波特率
// AdvancedInit_Structureure.AdvFeatureInit=UART_ADVFEATURE_AUTOBAUDRATE_INIT;//使用自动波特率配置
// AdvancedInit_Structureure.AutoBaudRateEnable=UART_ADVFEATURE_AUTOBAUDRATE_ENABLE;//自动波特率使能
// AdvancedInit_Structureure.AutoBaudRateMode=UART_ADVFEATURE_AUTOBAUDRATE_ONSTARTBIT;//自动波特率模式USARTx_SetConfig(USART2,&UART_InitStructureure,&AdvancedInit_Structureure);//根据UART_HandleStructureure型结构初始化USART2//USART_ITConfig(USART2,UART_IT_PE,ENABLE);
// __HAL_UART_ENABLE_IT(&UART_HandleStructureure, UART_IT_PE);
// //串口接收数据时,使能奇偶校验错误时产生中断,Enable the UART Parity Error Interrup// USART_ITConfig(USART2,UART_IT_ERR,ENABLE);
// __HAL_UART_ENABLE_IT(&UART_HandleStructureure, UART_IT_ERR);
// //串口接收数据时,使能帧错误、噪音错误和溢出错误时产生中断
// //Enable the UART Error Interrupt: (Frame error, noise error, overrun error)USART_ITConfig(USART2,UART_IT_RXNE,ENABLE);
// __HAL_UART_ENABLE_IT(&UART_HandleStructureure, UART_IT_RXNE);开启串口接收中断//串口接收数据时,使能"接收数据寄存器不为空"则产生中断(位RXNE=1)//Enable the UART Data Register not empty Interrupt/在串口中断服务函数中发送数据配置开始//
// USART_ITConfig(USART2,UART_IT_TXE,ENABLE);
// __HAL_UART_ENABLE_IT(&UART_HandleStructureure, UART_IT_TXE);//串口发送数据时,使能"串口发送数据寄存器为空"产生中断(位TXE=1)//Enable the UART Transmit data register empty InterruptUSART_ITConfig(USART2,UART_IT_TXE,DISABLE);
// __HAL_UART_DISABLE_IT(&UART_HandleStructureure, UART_IT_TXE);//串口发送数据时,不使能"串口发送数据寄存器为空"产生中断(位TXE=0)//Disable the UART Transmit Complete Interrupt// USART_ITConfig(USART2,UART_IT_TC,ENABLE);
// __HAL_UART_ENABLE_IT(&UART_HandleStructureure, UART_IT_TC);//串口发送数据时,使能"串口发送完成"产生中断(位TC=1)//Enable the UART Transmit Complete InterruptUSART_ITConfig(USART2,UART_IT_TC,DISABLE);
// __HAL_UART_DISABLE_IT(&UART_HandleStructureure,UART_IT_TC);//串口发送数据时,不使能"串口发送完成"产生中断(位TC=1)
/在串口中断服务函数中发送数据配置结束//HAL_NVIC_EnableIRQ(USART2_IRQn);//使能串口2中断//USART2_IRQn表示中断源为串口2
}//函数功能:
//PA0是为USART2_TX,PA1是USART2_RX
//中断优先级为0x01
//波特率为115200,数字为8位,停止位为1位,无奇偶校验,允许发送和接收数据,允许接收和发送中断,并使能串口
void USART2_Init(uint32_t baudrate)
{RS485_Enable_Output_Init();USART2_GPIO_Config();//USART2的IO口配置,PA0是为USART2_TX,PA1是USART2_RXUSART2_NVIC_Cpnfig();//设置串口2中断优先级为0x01
// USART2_Mode_Config(baudrate);//波特率为115200,数字为8位,停止位为1位,无奇偶校验,允许发送和接收数据,允许接收和发送中断,并使能串口My_USART2_Mode_Config(baudrate);
//波特率为115200,数字为8位,停止位为1位,无奇偶校验
//自动波特率配置模式
//允许发送和接收数据,允许接收和发送中断,并使能串口USART2_RX_Buffer_Load_Index = 0;USART2_RX_Time_Count = 0;USART2_TX_Completed_Flag = 0; //允许再次发送数据memset(USART2_RX_Buffer,0,USART2_RX_Buffer_Size);
}//重定义fputc函数
//函数功能:发送ch的值给USART2串口
int fputc(int ch, FILE *f)
{USART_SendData(USART2, (unsigned char) ch);while( USART_GetFlagStatus(USART2,USART_SR_TC)!= SET); //等待发送完成标志位被置1 return ch;
}//函数功能:串口2发送一个字节
void USART2_SendByte( unsigned char ch )
{USART_SendData(USART2, ch);while( USART_GetFlagStatus(USART2,USART_SR_TC)!= SET); //等待发送完成标志位被置1
}//函数功能:启动串口2发送
void USART2_Load_Send_Data(void)
{uint16_t k;RS485_ENABLE_PIN_Output_High();//RS485准备发送HAL_Delay(5);k=strlen((char*)USART2_TX_Buffer);USART2_TX_Buffer_Load_Index = k;启动发送/USART2_TX_Completed_Flag=1;USART2_TX_Overtime_Conter=0;USART2_TX_Buffer_Send_Index = 0; //设置USART2_TX_Buffer[]的发送索引值为0USART_ITConfig(USART2,UART_IT_TXE,ENABLE);
// USART_TXEIE_Config(USART2,ENABLE);//将"串口控制寄存器1(USART_CR1)中的TXEIE位"设置为1//串口发送数据时,使能"串口发送数据寄存器为空"产生中断(位TXEIE=1)//Enable the UART Transmit Complete Interrupt
}//函数功能:串口2中断服务程序
void USART2_IRQHandler(void)
{uint8_t RX_temp;if( _HAL_UART_GET_FLAG(USART2,USART_SR_RXNE) )
// if( SET==USART_GetITStatus(USART2,USART_SR_RXNE)){//在串口状态寄存器中,发现RXNE=1,且串口控制寄存器1允许接收数据RX_temp = (uint8_t)( USART_ReceiveData(USART2) );//读串口数据USART_ClearITPendingBit(USART2,USART_SR_RXNE);if(RX_temp=='1' && USART2_RX_Time_Count==0) USART2_RX_Time_Count = 1;//如果接收到帧头为变频器地址为0x1,则启动USART2接收时间计数器if(USART2_RX_Time_Count > 0){USART2_RX_Time_Count = 1;//设置USART2接收时间计数器为1;USART2_RX_Buffer[USART2_RX_Buffer_Load_Index] = RX_temp;//保存接收到的新数据USART2_RX_Buffer_Load_Index++;if(USART2_RX_Buffer_Load_Index>=USART2_RX_Buffer_Size) USART2_RX_Buffer_Load_Index=1;//防止USART2_RX_Buffer[]溢出}//软件先读"串口状态寄存器(USART_SR)",然后再读"串口数据寄存器USART_DR",就可以将ORE位(Overrun错误标志)清零;//软件先读"串口状态寄存器(USART_SR)",然后再读"串口数据寄存器USART_DR",就可以将NE位(噪声错误标志)清零;//软件先读"串口状态寄存器(USART_SR)",然后再读"串口数据寄存器USART_DR",就可以将FE位(帧错误标志)清零;//软件先读"串口状态寄存器(USART_SR)",然后再读"串口数据寄存器USART_DR",就可以将PE位(奇偶校验值错误)清零;//软件读"串口数据寄存器USART_DR",就可以将RXNE位清零}if( SET==USART_GetITStatus(USART2,USART_SR_TXE)){USART_ClearITPendingBit(USART2,UART_IT_TXE);if(USART2_TX_Buffer_Send_Index < USART2_TX_Buffer_Load_Index) //未发送完全部数据{USART_SendData(USART2,USART2_TX_Buffer[USART2_TX_Buffer_Send_Index]);//将USART2_TX_Buffer[USART2_TX_Buffer_Send_Index]的值写入串口发送"串口发送数据寄存器"USART2_TX_Buffer_Send_Index++;}else //RS485串口发送完成{USART_ITConfig(USART2,UART_IT_TXE,DISABLE);
// USART_TXEIE_Config(USART2,DISABLE);//串口发送数据时,不使能"串口发送数据寄存器为空"产生中断(位TXE=0)//Disabless Transmit Data Register empty interruptUSART_ITConfig(USART2,UART_IT_TC,ENABLE);//将"串口控制寄存器1(USART_CR1)中的TCIE位"设置为1//串口发送数据时,使能"串口发送完成"产生中断(位TCIE=1)//Enables Transmission complete interrupt }}if( SET==USART_GetITStatus(USART2,USART_SR_TC)){USART_ClearITPendingBit(USART2,UART_IT_TC);USART_ITConfig(USART2,UART_IT_TC,DISABLE);//将"串口控制寄存器1(USART_CR1)中的TCIE位"设置为0//串口发送数据时,不使能"串口发送完成"产生中断(位TCIE=0)//Disable the UART Transmit Complete InterruptUSART2_TX_Completed_Flag=2; //USART2发送完成USART2_TX_Overtime_Conter=0;USART2_TX_Buffer_Send_Index = 0;//清除USART2_TX_Buffer[]的发送索引值USART2_TX_Buffer_Load_Index = 0;//清除USART2_TX_Buffer[]的装载索引值
// USART2_RX_Time_Count=0;
// USART2_RX_Buffer_Load_Index = 0;//清接收计数索引RS485_ENABLE_PIN_Output_Low();//更改485为接收 }
}#include "py32f0xx_hal.h"
#include "SystemClock.h"
#include "USART2.h"
#include "stdio.h" //getchar(),putchar(),scanf(),printf(),puts(),gets(),sprintf()
#include "string.h" //使能strcpy(),strlen(),memset()
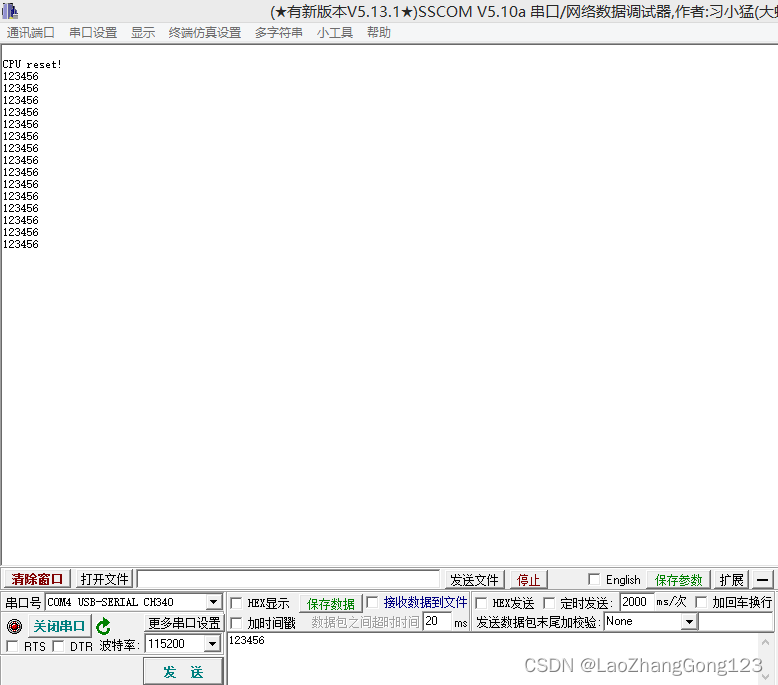
#include "delay.h"const char CPU_Reset_REG[]="\r\nCPU reset!\r\n";
int main(void)
{uint8_t i;delay_init();HAL_Delay(1000);USART2_Init(115200);strcpy((char*)USART2_TX_Buffer,CPU_Reset_REG);USART2_Load_Send_Data();while (1){delay_ms(10);for(i=0;i<USART2_RX_Buffer_Size;i++){if(USART2_RX_Buffer[0]=='1'){delay_ms(10);USART2_RX_Buffer_Load_Index = 0;USART2_RX_Time_Count = 0;USART2_TX_Completed_Flag = 0; //允许再次发送数据memset(USART2_TX_Buffer,0,USART2_TX_Buffer_Size);strcpy((char*)USART2_TX_Buffer,(char*)USART2_RX_Buffer);memset(USART2_RX_Buffer,0,USART2_RX_Buffer_Size);USART2_Load_Send_Data();delay_ms(10);}}}
}#include "MyUSART.h"void USART_ITConfig(USART_TypeDef * USARTx, uint32_t USART_IT, FunctionalState NewState);
//void USART_RXNEIE_Config(USART_TypeDef * USARTx, FunctionalState NewState);
//void USART_PEIE_Config(USART_TypeDef * USARTx, FunctionalState NewState);
//void USART_TXEIE_Config(USART_TypeDef * USARTx, FunctionalState NewState);
//void USART_EIE_Config(USART_TypeDef * USARTx, FunctionalState NewState);
FlagStatus USART_GetFlagStatus(USART_TypeDef* USARTx, uint16_t USART_FLAG);
ITStatus USART_GetITStatus(USART_TypeDef* USARTx, uint32_t USART_IT);
void USART_ClearITPendingBit(USART_TypeDef* USARTx, uint32_t USART_IT);
void USART_SendData(USART_TypeDef* USARTx, uint16_t Data);
uint16_t USART_ReceiveData(USART_TypeDef* USARTx);
void USARTx_SetConfig(USART_TypeDef* USARTx,UART_InitTypeDef *Init,UART_AdvFeatureInitTypeDef *AdvancedInit);//函数功能:
//当NewState=ENABLE,USART_IT=UART_IT_RXNE,使能串口接收寄存器为非空时产生中断,即使能RXNEIE=1
//当NewState=ENABLE,USART_IT=UART_IT_PE,使能串口奇偶校验错误产生中断,即使能PEIE=1
//当NewState=ENABLE,USART_IT=UART_IT_ERR,使能帧错误、噪音错误和溢出错误时产生中断,即使能EIE=1
//当NewState=ENABLE,USART_IT=UART_IT_TXE时,使能串口发送寄存器为空产生中断,即使能TXEIE=1
//当NewState=ENABLE,USART_IT=UART_IT_TC时,使能发送完成产生中断,即使能TCIE=1
void USART_ITConfig(USART_TypeDef * USARTx, uint32_t USART_IT, FunctionalState NewState)
{if(NewState==DISABLE) _UART_DISABLE_IT(USARTx,USART_IT);else _HAL_UART_ENABLE_IT(USARTx,USART_IT);
}/*
//函数功能:使能串口接收中断
//当NewState=ENABLE,使能串口接收中断
//当NewState=DISABLE,不使能串口接收中断
void USART_RXNEIE_Config(USART_TypeDef * USARTx, FunctionalState NewState)
{if(NewState==DISABLE)CLEAR_BIT(USARTx->CR1,USART_CR1_RXNEIE);//将"串口控制寄存器1(USART_CR1)中的RXNEIE位"置0,不使能RXNE接收产生中断elseSET_BIT(USARTx->CR1,USART_CR1_RXNEIE);//将"串口控制寄存器1(USART_CR1)中的RXNEIE位"置1,使能RXNE接收产生中断
}//函数功能:使能串口奇偶校验错误中断
//当NewState=ENABLE,使能PE奇偶校验错误产生中断
//当NewState=DISABLE,不使能PE奇偶校验错误产生中断
void USART_PEIE_Config(USART_TypeDef * USARTx, FunctionalState NewState)
{if(NewState==DISABLE)CLEAR_BIT(USARTx->CR1,USART_CR1_PEIE);//将"串口控制寄存器1(USART_CR1)中的PEIE位"置0,不使能PE奇偶校验错误产生中断elseSET_BIT(USARTx->CR1,USART_CR1_PEIE);//将"串口控制寄存器1(USART_CR1)中的PEIE位"置1,使能PE奇偶校验错误产生中断
}//函数功能:使能串口发送中断
//当NewState=ENABLE,使能TXE发送产生中断
//当NewState=DISABLE,不使能TXE发送产生中断
void USART_TXEIE_Config(USART_TypeDef * USARTx, FunctionalState NewState)
{if(NewState==DISABLE)CLEAR_BIT(USARTx->CR1,USART_CR1_TXEIE);//将"串口控制寄存器1(USART_CR1)中的TXEIE位"置0,不使能TXE发送产生中断elseSET_BIT(USARTx->CR1,USART_CR1_TXEIE);//将"串口控制寄存器1(USART_CR1)中的TXEIE位"置1,使能TXE发送产生中断
}//函数功能:使能串口"帧错误FE、overrun错误ORE和噪声NF“产生中断
//当NewState=ENABLE,使能串口"帧错误FE、overrun错误ORE和噪声NF“产生中断能TXE发送产生中断
//当NewState=DISABLE,不使能串口"帧错误FE、overrun错误ORE和噪声NF“产生中断能TXE发送产生中断
void USART_EIE_Config(USART_TypeDef * USARTx, FunctionalState NewState)
{if(NewState==DISABLE)CLEAR_BIT(USARTx->CR3, USART_CR3_EIE);//清除"帧错误FE、overrun错误ORE和噪声NF中断使能位"elseSET_BIT(USARTx->CR3, USART_CR3_EIE);//将"串口控制寄存器1(USART_CR3)中的EIE位"置1,使能"帧错误FE、overrun错误ORE和噪声NF“产生中断
}
*///函数功能:读串口状态标志位
FlagStatus USART_GetFlagStatus(USART_TypeDef* USARTx, uint16_t USART_FLAG)
{if( USART_FLAG & READ_REG(USARTx->SR) ) return SET;else return RESET;
}//函数功能:读串口中断标志位
ITStatus USART_GetITStatus(USART_TypeDef* USARTx, uint32_t USART_IT)
{if( USART_IT & READ_REG(USARTx->SR) ) return SET;else return RESET;
}//函数功能:
//USART_IT=UART_IT_RXNE,清除"串口接收寄存器为非空时产生的中断标志位"
//USART_IT=UART_IT_PE,清除"串口奇偶校验错误产生的中断标志位"
//USART_IT=UART_IT_ERR,清除"帧错误、噪音错误和溢出错误时产生的中断标志位"
//USART_IT=UART_IT_TXE时,清除"串口发送寄存器为空产生的中断标志位"
//USART_IT=UART_IT_TC时,清除"发送完成产生的中断标志位"
void USART_ClearITPendingBit(USART_TypeDef* USARTx, uint32_t USART_IT)
{CLEAR_BIT(USARTx->SR,USART_IT);//将"状态寄存器USART_SR"的USART_IT
}//函数功能:串口发送数据
void USART_SendData(USART_TypeDef* USARTx, uint16_t Data)
{USARTx->DR = (Data & (uint16_t)0x01FF);
}//函数功能:串口接收数据
uint16_t USART_ReceiveData(USART_TypeDef* USARTx)
{return (uint16_t)(USARTx->DR & (uint16_t)0x01FF);
}//函数功能:USARTx_CK引脚配置
void USART_CK_Pin_Config(USART_TypeDef* USARTx, FunctionalState NewState)
{if(NewState==DISABLE){CLEAR_BIT(USARTx->CR2, USART_CR2_CLKEN);//清除"串口控制寄存器2(USART_CR2)中的CLKEN位",不使能USARTx_CK引脚}else{SET_BIT(USARTx->CR2, USART_CR2_CLKEN);//设置"串口控制寄存器2(USART_CR2)中的CLKEN位",使能USARTx_CK引脚}
}//函数功能:USARTx半双工通讯配置
//NewState=DISABLE,配置串口为"非半双工模式"
//NewState=ENABLE,配置串口为"半双工模式"
void USART_Half_Duplex_Config(USART_TypeDef* USARTx, FunctionalState NewState)
{if(NewState==DISABLE){CLEAR_BIT(USARTx->CR3, USART_CR3_HDSEL);//清除"串口控制寄存器3(USART_CR3)中的HDSEL位",配置串口为"非半双工模式"}else{SET_BIT(USARTx->CR3, USART_CR3_HDSEL);//设置"串口控制寄存器3(USART_CR3)中的HDSEL位",配置串口为"半双工模式"}
}//函数工能:使用自动波特率配置
//AdvancedInit->AdvFeatureInit=UART_ADVFEATURE_AUTOBAUDRATE_INIT;//使用自动波特率配置
//AdvancedInit->AutoBaudRateEnable=UART_ADVFEATURE_AUTOBAUDRATE_ENABLE;//自动波特率使能
//AdvancedInit->AutoBaudRateMode=UART_ADVFEATURE_AUTOBAUDRATE_ONSTARTBIT;//自动波特率模式
void USART_Automatic_Baudrate_Detection_Config(USART_TypeDef* USARTx, UART_AdvFeatureInitTypeDef *AdvancedInit)
{/* Check whether the set of advanced features to configure is properly set */assert_param(IS_UART_ADVFEATURE_INIT(AdvancedInit->AdvFeatureInit));/* if required, configure auto Baud rate detection scheme */if (HAL_IS_BIT_SET(AdvancedInit->AdvFeatureInit, UART_ADVFEATURE_AUTOBAUDRATE_INIT)){assert_param(IS_USART_AUTOBAUDRATE_DETECTION_INSTANCE(USARTx));assert_param(IS_UART_ADVFEATURE_AUTOBAUDRATE(AdvancedInit->AutoBaudRateEnable));MODIFY_REG(USARTx->CR3, USART_CR3_ABREN, AdvancedInit->AutoBaudRateEnable);/* set auto Baudrate detection parameters if detection is enabled */if (AdvancedInit->AutoBaudRateEnable == UART_ADVFEATURE_AUTOBAUDRATE_ENABLE){assert_param(IS_UART_ADVFEATURE_AUTOBAUDRATEMODE(AdvancedInit->AutoBaudRateMode));MODIFY_REG(USARTx->CR3, USART_CR3_ABRMODE, AdvancedInit->AutoBaudRateMode);}}
}//函数功能:将UART_InitTypeDef型结构变量写入"串口控制寄存器"
void USARTx_SetConfig(USART_TypeDef* USARTx,UART_InitTypeDef *Init,UART_AdvFeatureInitTypeDef *AdvancedInit)
{uint32_t tmpreg;uint32_t pclk;/* Check the parameters */assert_param(IS_UART_BAUDRATE(Init->BaudRate));assert_param(IS_UART_STOPBITS(Init->StopBits));assert_param(IS_UART_PARITY(Init->Parity));assert_param(IS_UART_MODE(Init->Mode));_HAL_UART_DISABLE(USARTx);//将"串口控制寄存器1(USART_CR1)中的UE位"置0,不使能串口/*-------------------------- USART CR2 Configuration -----------------------*//* Configure the UART Stop Bits: Set STOP[13:12] bitsaccording to Init->StopBits value */MODIFY_REG(USARTx->CR2, USART_CR2_STOP, Init->StopBits);//使用Init->StopBits的值修改"串口控制寄存器2(USART_CR2)中的STOP位",用来设置停止位的位数/*-------------------------- USART CR1 Configuration -----------------------*//* Configure the UART Word Length, Parity and mode:Set the M bits according to Init->WordLength valueSet PCE and PS bits according to Init->Parity valueSet TE and RE bits according to Init->Mode valueSet OVER8 bit according to Init->OverSampling value */#if defined(USART_CR3_OVER8)tmpreg = (uint32_t)Init->WordLength | Init->Parity | Init->Mode;//将"数据长度,奇偶校验,串口发送和接收模式合并为字,准备修改"串口控制寄存器1(USART_CR1)MODIFY_REG(USARTx->CR1,(uint32_t)(USART_CR1_M | USART_CR1_PCE | USART_CR1_PS | USART_CR1_TE | USART_CR1_RE),tmpreg);tmpreg = (uint32_t) Init->OverSampling;//准备修改"串口控制寄存器3(USART_CR3)中的OVER8位"MODIFY_REG(USARTx->CR3,(uint32_t)(USART_CR3_OVER8),tmpreg);
#elsetmpreg = (uint32_t)Init->WordLength | Init->Parity | Init->Mode;MODIFY_REG(USARTx->CR1,(uint32_t)(USART_CR1_M | USART_CR1_PCE | USART_CR1_PS | USART_CR1_TE | USART_CR1_RE),tmpreg);
#endif /* USART_CR3_OVER8 *//*-------------------------- USART CR3 Configuration -----------------------*//* Configure the UART HFC: Set CTSE and RTSE bits according to Init->HwFlowCtl value */MODIFY_REG(USARTx->CR3, (USART_CR3_RTSE | USART_CR3_CTSE), Init->HwFlowCtl);//修改"串口控制寄存器3中的RTS和CTS位"#if defined(USART_CR3_OVER8)/* Check the Over Sampling */if(Init->OverSampling == UART_OVERSAMPLING_8){/*-------------------------- USART BRR Configuration ---------------------*/pclk = HAL_RCC_GetPCLK1Freq();//读取PCLK1时钟频率USARTx->BRR = UART_BRR_SAMPLING8(pclk, Init->BaudRate);//设置串口波特率}else{/*-------------------------- USART BRR Configuration ---------------------*/pclk = HAL_RCC_GetPCLK1Freq();//读取PCLK1时钟频率USARTx->BRR = UART_BRR_SAMPLING16(pclk, Init->BaudRate);//设置串口波特率}
#else/*-------------------------- USART BRR Configuration ---------------------*/pclk = HAL_RCC_GetPCLK1Freq();USARTx->BRR = UART_BRR_SAMPLING16(pclk, Init->BaudRate);#endif /* USART_CR3_OVER8 */if( AdvancedInit->AdvFeatureInit != UART_ADVFEATURE_NO_INIT ){//使用自动波特率配置USART_Automatic_Baudrate_Detection_Config(USARTx,AdvancedInit);}USART_CK_Pin_Config(USARTx,DISABLE);//不使用USARTx_CK引脚配置USART_Half_Duplex_Config(USARTx,DISABLE);//配置串口为"非半双工模式"_HAL_UART_ENABLE(USARTx);//使能串口
}#ifndef __MyUSART_H
#define __MyUSART_H#include "py32f0xx_hal.h"#define _HAL_UART_ENABLE(__INSTANCE__) ((__INSTANCE__)->CR1 |= USART_CR1_UE)
//将"串口控制寄存器1(USART_CR1)中的UE位"置1,使能串口#define _HAL_UART_DISABLE(__INSTANCE__) ((__INSTANCE__)->CR1 &= ~USART_CR1_UE)
//将"串口控制寄存器1(USART_CR1)中的UE位"置0,不使能串口#define _HAL_UART_ENABLE_IT(__INSTANCE__, __INTERRUPT__) ((((__INTERRUPT__) >> 28U) == UART_CR1_REG_INDEX)? ((__INSTANCE__)->CR1 |= ((__INTERRUPT__) & UART_IT_MASK)): \(((__INTERRUPT__) >> 28U) == UART_CR2_REG_INDEX)? ((__INSTANCE__)->CR2 |= ((__INTERRUPT__) & UART_IT_MASK)): \((__INSTANCE__)->CR3 |= ((__INTERRUPT__) & UART_IT_MASK)))
//使能串口中断#define _UART_DISABLE_IT(__INSTANCE__, __INTERRUPT__) ((((__INTERRUPT__) >> 28U) == UART_CR1_REG_INDEX)? ((__INSTANCE__)->CR1 &= ~((__INTERRUPT__) & UART_IT_MASK)): \(((__INTERRUPT__) >> 28U) == UART_CR2_REG_INDEX)? ((__INSTANCE__)->CR2 &= ~((__INTERRUPT__) & UART_IT_MASK)): \((__INSTANCE__)->CR3 &= ~ ((__INTERRUPT__) & UART_IT_MASK)))
//不使能串口中断#define _HAL_UART_GET_FLAG(__INSTANCE__, __FLAG__) (((__INSTANCE__)->SR & (__FLAG__)) == (__FLAG__))extern void USART_ITConfig(USART_TypeDef * USARTx, uint32_t USART_IT, FunctionalState NewState);
//extern void USART_RXNEIE_Config(USART_TypeDef * USARTx, FunctionalState NewState);
//extern void USART_PEIE_Config(USART_TypeDef * USARTx, FunctionalState NewState);
//extern void USART_TXEIE_Config(USART_TypeDef * USARTx, FunctionalState NewState);
//void USART_EIE_Config(USART_TypeDef * USARTx, FunctionalState NewState);
extern FlagStatus USART_GetFlagStatus(USART_TypeDef* USARTx, uint16_t USART_FLAG);
extern ITStatus USART_GetITStatus(USART_TypeDef* USARTx, uint32_t USART_IT);
extern void USART_ClearITPendingBit(USART_TypeDef* USARTx, uint32_t USART_IT);
extern void USART_SendData(USART_TypeDef* USARTx, uint16_t Data);
extern uint16_t USART_ReceiveData(USART_TypeDef* USARTx);
extern void USARTx_SetConfig(USART_TypeDef* USARTx,UART_InitTypeDef *Init,UART_AdvFeatureInitTypeDef *AdvancedInit);
#endif /* __MyUSART_H */#include "delay.h"static uint8_t fac_us=0; //us延时倍乘数void delay_init(void);
void delay_us(uint32_t nus);
void delay_ms(uint32_t nms);//函数功能:配置"SysTick定时器"每1ms中断一次,优先级为最低
void delay_init(void)
{fac_us=SystemCoreClock/1000000;//不论是否使用OS,fac_us都需要使用uwTickFreq=HAL_TICK_FREQ_1KHZ;//准备配置"SysTick定时器"每1ms中断一次//配置"SysTick定时器"时钟源为系统时钟,并使能中断//HAL_TICK_FREQ_10HZ= 100,"SysTick计数器"的中断周期为100ms//HAL_TICK_FREQ_100HZ= 10,"SysTick计数器"的中断周期为10ms//HAL_TICK_FREQ_1KHZ = 1,"SysTick计数器"的中断周期为1msHAL_InitTick(PRIORITY_LOWEST);//配置"SysTick定时器"每1ms中断一次,优先级为最低
// HAL_Init();//配置"SysTick定时器"每1ms中断一次,优先级为最低HAL_SetTickFreq(uwTickFreq);//设置"SysTick滴答定时器"的中断周期为uwTickFreq个毫秒
}//函数功能:延时nus
//nus:要延时的us数.
//nus:0~204522252(最大值即2^32/fac_us)
void delay_us(uint32_t nus)
{ uint32_t ticks;uint32_t told,tnow,tcnt=0;uint32_t reload=SysTick->LOAD;//读取"SysTick定时器"自动重装载值ticks=nus*fac_us; //需要的节拍数 told=SysTick->VAL; //读取"系统滴答定时器的计数值"while(1){tnow=SysTick->VAL;//读取"系统滴答定时器的计数值" if(tnow!=told){ if(tnow<told)tcnt+=told-tnow; //这里注意一下SYSTICK是一个递减的计数器就可以了.else tcnt+=reload-tnow+told; told=tnow;if(tcnt>=ticks)break; //时间超过/等于要延迟的时间,则退出.} }
}//函数功能:延时nms
//nms:要延时的ms数
//nms:0~65535
void delay_ms(uint32_t nms)
{ delay_us((uint32_t)(nms*1000));//普通方式延时
}//HAL库接口函数
//HAL_Delay(x)延时x毫秒,x<0xFFFFFFFF,至少需要延时一个周期
//HAL_SuspendTick();不使能"SysTick滴答定时器"中断
//HAL_ResumeTick();使能"SysTick滴答定时器"中断
//HAL_GetTickFreq();读取"SysTick滴答定时器"的中断频率
//HAL_SetTickFreq(Freq);设置"SysTick滴答定时器"的中断频率为Freq
//HAL_GetTickPrio();读取"SysTick滴答定时器"的中断优先级
//HAL_GetTick();读取"SysTick滴答定时器"的中断次数计数器uwTick
//HAL_IncTick();供SysTick_Handler()调用
//uwTickFreq=HAL_TICK_FREQ_1KHZ;//准备配置"SysTick定时器"每1ms中断一次
//HAL_InitTick(PRIORITY_LOWEST);//配置"SysTick定时器"每1ms中断一次,优先级为最低
//HAL_SYSTICK_CLKSourceConfig(uint32_t CLKSource)
//设置系统滴答定时器的时钟源
//CLKSource=SYSTICK_CLKSOURCE_HCLK_DIV8时,系统滴答定时器的时钟源为系统时钟的8分频
//CLKSource=SYSTICK_CLKSOURCE_HCLK,系统滴答定时器的时钟源为系统时钟三、测试结果
相关文章:
PY32F003F18之RS485通讯
PY32F003F18将USART2连接到RS485芯片,和其它RS485设备实现串口接收后再转发的功能。 一、测试电路 二、测试程序 #include "USART2.h" #include "stdio.h" //getchar(),putchar(),scanf(),printf(),puts(),gets(),sprintf() #include "…...

概率论与数理统计学习笔记(7)——全概率公式与贝叶斯公式
目录 1. 背景2. 全概率公式3. 贝叶斯公式 1. 背景 下图是本文的背景内容,小B休闲时间有80%的概率玩手机游戏,有20%的概率玩电脑游戏。这两个游戏都有抽卡环节,其中手游抽到金卡的概率为5%,端游抽到金卡的概率为15%。已知小B这天抽…...
深入了解 Axios 的 put 请求:使用技巧与最佳实践
在前端开发中,我们经常需要与后端服务器进行数据交互。其中,PUT 请求是一种常用的方法,用于向服务器发送更新或修改数据的请求。通过发送 PUT 请求,我们可以更新服务器上的资源状态。 Axios 是一个流行的 JavaScript 库࿰…...
浅谈Http协议、TCP协议(转载)
TCP标志位,有6种标示:SYN(synchronous建立联机) ,ACK(acknowledgement 确认) ,PSH(push传送),FIN(finish结束) ,RST(reset重置), URG(urgent紧急) Sequence number(顺序号码) ,Acknowledge num…...

flatten-maven-plugin使用
这篇文章主要介绍了flatten-maven-plugin使用,本文通过示例代码给大家介绍的非常详细,对大家的学习或工作具有一定的参考借鉴价值,需要的朋友可以参考下 − 目录 一、简介 1.1 作用1.2 goal介绍二、使用总结 一、简介 1.1 作用 将pom工程父子pom的版…...

Vue3中快速简单使用CKEditor 5富文本编辑器
Vue3简单使用CKEditor 5 前言准备定制基础配置富文本配置目录当前文章demo目录结构 快速使用demo 前言 CKEditor 5就是内嵌在网页中的一个富文本编辑器工具 CKEditor 5开发文档(英文):https://ckeditor.com/docs/ckeditor5/latest/index.htm…...

qt简易网络聊天室 数据库的练习
qt网络聊天室 服务器: 配置文件.pro QT core gui networkgreaterThan(QT_MAJOR_VERSION, 4): QT widgetsCONFIG c11# The following define makes your compiler emit warnings if you use # any Qt feature that has been marked deprecated (the exac…...
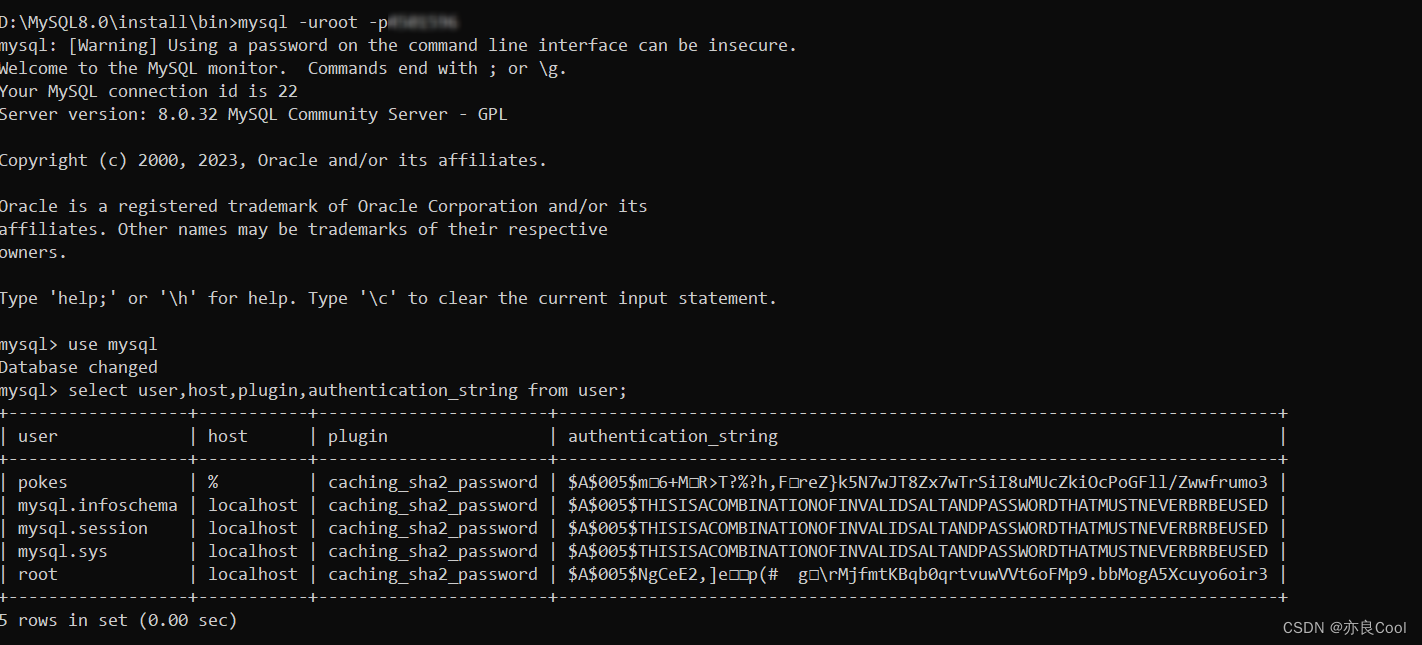
Navicat连接mysql8.0:提示无法加载身份验证插件“caching_sha2_password”
Navicat连接mysql时,提示:Unable to load authentication plugin ‘caching_sha2_password‘. 原因:mysql 8.0 默认使用 caching_sha2_password 身份验证机制。 D:\MySQL8.0\install\bin>mysql -uroot -p123456789 #登录 mysql: [War…...
手写签名到背景上合为1张图
手写签名到背景上合为1张图 package.json中 "signature_pad": "3.0.0-beta.3"<template><div class"home"><canvas id"canvas" width"500" height"300"></canvas><button click"…...

华为认证系统学习大纲及课程
前言 任何学习过程都需要一个科学合理的学习路线,才能够有条不紊的完成我们的学习目标。华为认证网络工程师所需学习的内容纷繁复杂,难度较大,所以今天特别为大家整理了一个全面的华为认证网络工程师学习大纲及课程,帮大家理清思…...
某米ax3000路由器组网解析
我们使用某米k60手机与某米ax3000 wifi6路由器组网,来分析和学习网络速率与瓶颈限制。 某米 AX3000 路由器简介 某米 AX3000 路由器是一款支持 WiFi 6 的双频路由器,它的 MIMO 是 22,也就是两根天线。MIMO 是 Multiple Input Multiple Outpu…...

【leetcode 力扣刷题】数学题之除法:哈希表解决商的循环节➕快速乘求解商
两道和除法相关的力扣题目 166. 分数到小数29. 两数相除快速乘解法一:快速乘变种解法二: 二分查找 快速乘 166. 分数到小数 题目链接:166. 分数到小数 题目内容: 题目是要我们把一个分数变成一个小数,并以字符串的形…...
方法-set.union())
Union类型和集合的union()方法-set.union()
Union类型和集合的Union 方法 一、Union类型1.Union类型由来2.Union类型的语法3.Union类型的使用4.一些等价写法 二、Set.union()union() 语法示例代码 一、Union类型 1.Union类型由来 Python中的Union类型是 3.10版本引入的新功能之一。它是一种特殊的类型注释,用…...
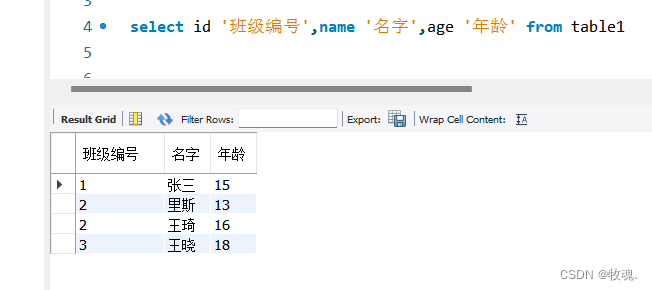
简明SQL别名指南:掌握AS实现列名更名
在 SQL 查询中,使用 {原始字段名} as {别名} 的语法来为查询结果的列赋予更直观的名称,以提高查询结果的可读性和可理解性。 以下是用到的表。 用AS更名 例如,查询表1的name字段,并将其更名为"名字",同时查…...

基于量子密钥分发和区块链技术的新一代加密通信系统
量子通信与区块链构建下一代加密通信基础设施 量子技术和区块链技术是国家信息安全和国家数字化转型的重要组成部分,在国家战略中具有重要地位。“十四五”规划纲要将“加快数字发展建设数字中国”作为独立篇章,指出要进一步明确发展云计算、大数据、物联…...

网络安全-子域名收集
本文为作者学习文章,按作者习惯写成,如有错误或需要追加内容请留言(不喜勿喷) 本文为追加文章,后期慢慢追加 子域名 子域名指二级域名,二级域名是顶级域名(一级域名)的下一级比如mail.heetian.com和bbs.heetian.com…...

go-zero jwt 鉴权快速实战
前面我们分享了 go-zero 的快速实战以及日志组件的剖析,本次我们来实战使用 go-zero jwt 鉴权 本次文章主要是分享关于 go-zero 中 jwt 的使用方式,会以一个 demo 的方式来进行实战,对于使用 goctl 工具以及安装细节就不在赘述,有…...

9.8day58 单调栈
739. 每日温度 - 力扣(LeetCode) 知识点:1.建栈 2.如果后面要加入的数小于栈顶元素就把数组的下标压进栈里 3.反之 就让该数于栈顶元素进行比较 如果该数大于栈顶元素(while) 就把栈顶元素下表对应的arr数组的值进行…...
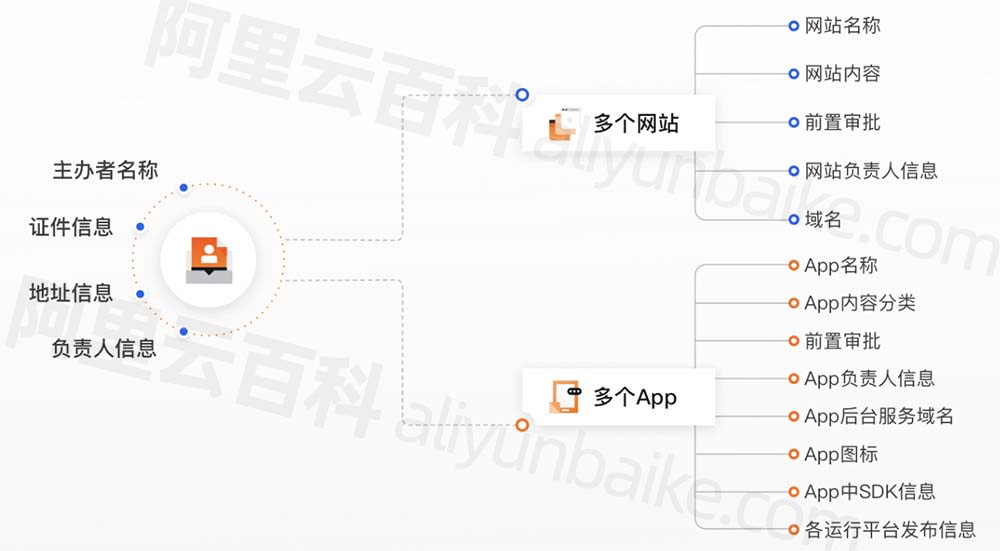
快速完成工信部APP备案流程_以阿里云APP备案为例
阿里云APP备案流程分为6步,APP备案成功后应用可以上架,登录阿里云账号填写APP信息,等待阿里云初审,初审通过后进行工信部短信核验,管局审核通过后APP即可备案成功,最后移动APP应用可以分发平台上架…...

uniapp中UView中 u-form表单在v-for循环下如何进行表单校验
1、数据data格式 注:rule绑定的tableFromRule中要和表单tableFrom下面放置一个同名数组,确保u-form能找到 tableFrom: {tableData: [//数据详情列表]},tableFromRule: {//校验tableData: [//数据详情列表]},formRules:{localation:[{required: true,mes…...
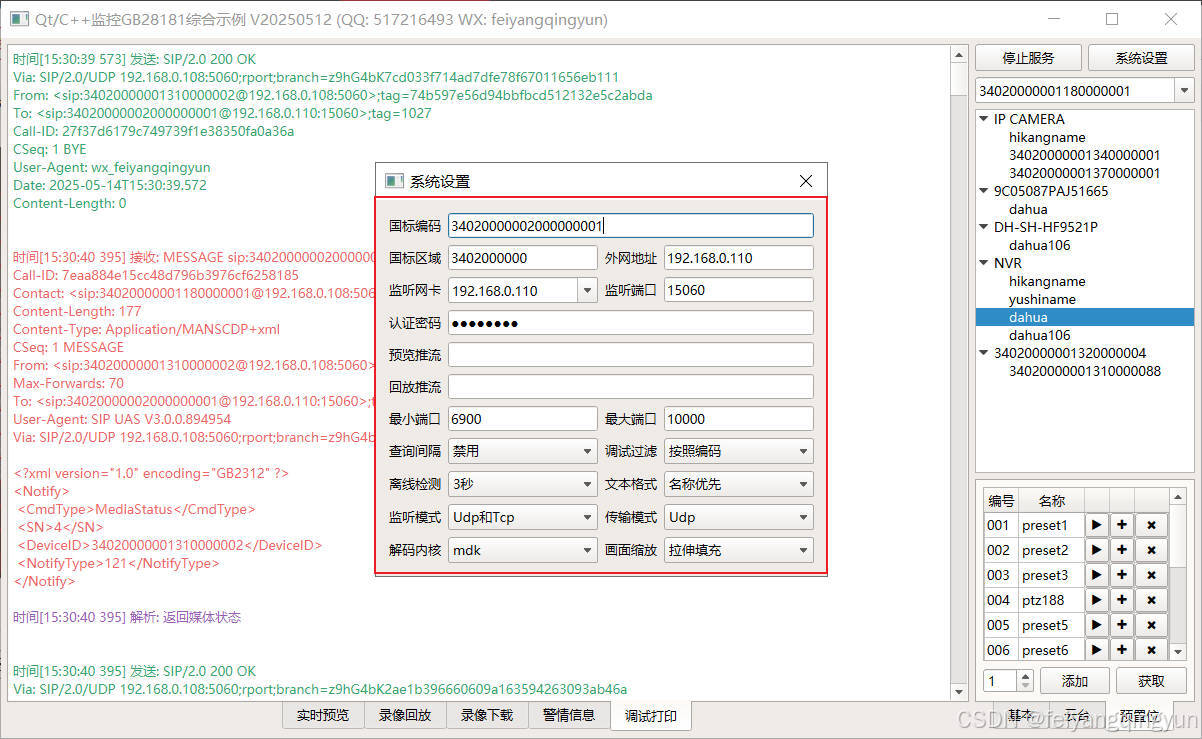
Qt/C++开发监控GB28181系统/取流协议/同时支持udp/tcp被动/tcp主动
一、前言说明 在2011版本的gb28181协议中,拉取视频流只要求udp方式,从2016开始要求新增支持tcp被动和tcp主动两种方式,udp理论上会丢包的,所以实际使用过程可能会出现画面花屏的情况,而tcp肯定不丢包,起码…...

渲染学进阶内容——模型
最近在写模组的时候发现渲染器里面离不开模型的定义,在渲染的第二篇文章中简单的讲解了一下关于模型部分的内容,其实不管是方块还是方块实体,都离不开模型的内容 🧱 一、CubeListBuilder 功能解析 CubeListBuilder 是 Minecraft Java 版模型系统的核心构建器,用于动态创…...
基础光照(Basic Lighting))
C++.OpenGL (10/64)基础光照(Basic Lighting)
基础光照(Basic Lighting) 冯氏光照模型(Phong Lighting Model) #mermaid-svg-GLdskXwWINxNGHso {font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;fill:#333;}#mermaid-svg-GLdskXwWINxNGHso .error-icon{fill:#552222;}#mermaid-svg-GLd…...

土地利用/土地覆盖遥感解译与基于CLUE模型未来变化情景预测;从基础到高级,涵盖ArcGIS数据处理、ENVI遥感解译与CLUE模型情景模拟等
🔍 土地利用/土地覆盖数据是生态、环境和气象等诸多领域模型的关键输入参数。通过遥感影像解译技术,可以精准获取历史或当前任何一个区域的土地利用/土地覆盖情况。这些数据不仅能够用于评估区域生态环境的变化趋势,还能有效评价重大生态工程…...
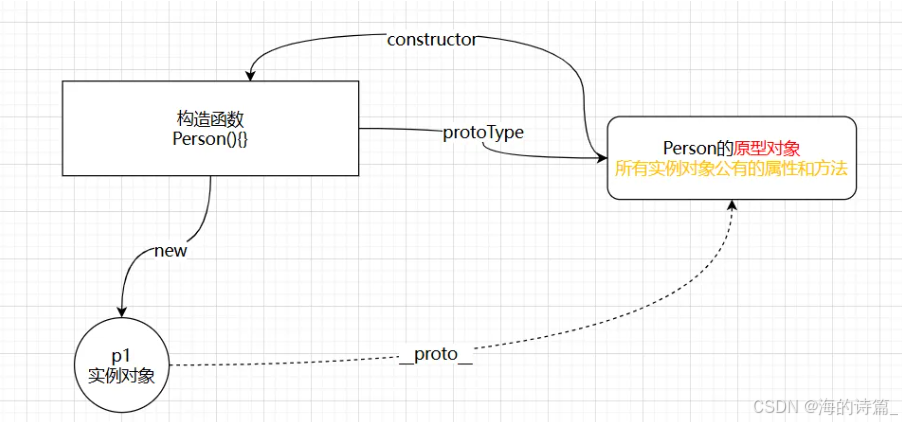
前端开发面试题总结-JavaScript篇(一)
文章目录 JavaScript高频问答一、作用域与闭包1.什么是闭包(Closure)?闭包有什么应用场景和潜在问题?2.解释 JavaScript 的作用域链(Scope Chain) 二、原型与继承3.原型链是什么?如何实现继承&a…...
集成 Mybatis-Plus 和 Mybatis-Plus-Join)
纯 Java 项目(非 SpringBoot)集成 Mybatis-Plus 和 Mybatis-Plus-Join
纯 Java 项目(非 SpringBoot)集成 Mybatis-Plus 和 Mybatis-Plus-Join 1、依赖1.1、依赖版本1.2、pom.xml 2、代码2.1、SqlSession 构造器2.2、MybatisPlus代码生成器2.3、获取 config.yml 配置2.3.1、config.yml2.3.2、项目配置类 2.4、ftl 模板2.4.1、…...
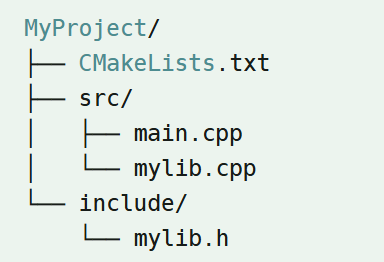
认识CMake并使用CMake构建自己的第一个项目
1.CMake的作用和优势 跨平台支持:CMake支持多种操作系统和编译器,使用同一份构建配置可以在不同的环境中使用 简化配置:通过CMakeLists.txt文件,用户可以定义项目结构、依赖项、编译选项等,无需手动编写复杂的构建脚本…...

WEB3全栈开发——面试专业技能点P7前端与链上集成
一、Next.js技术栈 ✅ 概念介绍 Next.js 是一个基于 React 的 服务端渲染(SSR)与静态网站生成(SSG) 框架,由 Vercel 开发。它简化了构建生产级 React 应用的过程,并内置了很多特性: ✅ 文件系…...
Unity VR/MR开发-VR开发与传统3D开发的差异
视频讲解链接:【XR马斯维】VR/MR开发与传统3D开发的差异【UnityVR/MR开发教程--入门】_哔哩哔哩_bilibili...

Spring Boot + MyBatis 集成支付宝支付流程
Spring Boot MyBatis 集成支付宝支付流程 核心流程 商户系统生成订单调用支付宝创建预支付订单用户跳转支付宝完成支付支付宝异步通知支付结果商户处理支付结果更新订单状态支付宝同步跳转回商户页面 代码实现示例(电脑网站支付) 1. 添加依赖 <!…...